实现伺服电动机位置控制控制方式模块五
- 格式:ppt
- 大小:4.17 MB
- 文档页数:22

工业机器人技术与应用考试模拟题及答案一、判断题(共100题,每题1分,共100分)1.输入采样阶段,PLC的CPU对各输入端子进行扫描,将输入信号送入输入映像寄存器(PII)。
A、正确B、错误正确答案:A2.并联关节机器人的正运动学问题求解易,逆运动学问题求解难。
A、正确B、错误正确答案:A3.在PWMT调制中,脉冲宽度越小,脉冲的间隔时间越大,输出的电压平均值就越小。
()。
A、正确B、错误正确答案:B4.换向阀靠近弹簧一侧的方框(位)为常态。
()。
A、正确B、错误正确答案:A5.被誉为“工业机器人之父”的约瑟夫·英格伯格最早提出了工业机器人概念。
A、正确正确答案:B6.越来越多的本地公司开始在他们业务中引入机器视觉,一些是普通工控产品的代理商,一些事自动化系统集成商。
A、正确B、错误正确答案:A7.机器视觉是计算机视觉在工业场景中的应用,目的是替代传统的人工。
A、正确B、错误正确答案:A8.线性运动过程中轨迹可控,工具姿态不会改变,因此方便操作员的直观操作。
A、正确B、错误正确答案:A9.机器人常用驱动方式主要是液压驱动、气压驱动和电气驱动三种基本类型。
A、正确B、错误正确答案:A10.关节式码垛机器人本体与关节式搬运机器人没有任何区别,在任何情况下都可以互换。
B、错误正确答案:B11.在生产现场,存在着大量的模拟量,如压力、流量、温度等参数,可以用标准库中的FC105和FC106进行工程转换。
A、正确B、错误正确答案:A12.示教-再现控制为一种在线编程方式,它的最大问题是占用生产时间。
A、正确B、错误正确答案:A13.在大多数伺服电动机的控制回路中,都采用了电压控制方式。
A、正确B、错误正确答案:B14.若将带传动的中心距 a 减小,则所设计的带传动传动能力降低,带的寿命提高。
A、正确B、错误正确答案:B15.液压油的粘度随温度升高而增大。
A、正确正确答案:B16.变量VAR在程序执行过程中和停止时会保持当前值,在程序指针被移到主程序时,当前仍然保持。

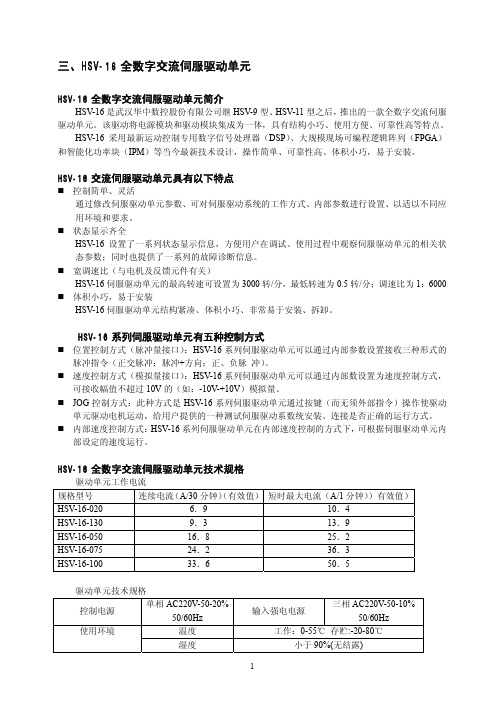
直流伺服电动机是一种广泛应用于工业控制系统中的电动机,其主要特点是控制精度高、速度范围广、响应速度快等。
而脉宽调制(PWM)技术是一种常用的电力控制技术,通过调整脉冲宽度来控制输出电压,被广泛应用于直流伺服电动机的速度和位置控制中。
本文将介绍直流伺服电动机脉宽调制的工作原理,包括脉宽调制原理、直流伺服电动机的工作原理、脉宽调制在直流伺服电动机中的应用等内容。
一、脉宽调制原理脉宽调制技术是一种通过调制脉冲信号的宽度来控制输出电压或电流的技术。
其基本原理是将输入信号与一个高频的载波信号进行调制,通过改变调制信号的脉冲宽度,来实现对输出信号的控制。
脉宽调制技术可以实现对输出信号的精确控制,并且具有简单、成本低廉、效率高等优点,因此被广泛应用于各种电力控制领域。
二、直流伺服电动机的工作原理直流伺服电动机是一种能够精确控制角度、速度和位置的电动机,其主要由电动机、编码器和控制器组成。
控制器通过不断地监测编码器反馈的位置信息,计算电机与期望位置之间的误差,并输出控制信号来调节电机的速度和位置,从而实现对电机的精确控制。
三、脉宽调制在直流伺服电动机中的应用脉宽调制技术被广泛应用于直流伺服电动机的速度和位置控制中,其工作原理如下:控制器根据输入的期望速度或位置信号,计算出电机的转速或角度误差,然后将误差信号传递给脉宽调制模块。
脉宽调制模块通过调整输出脉冲信号的宽度和周期,控制电机的转速和位置,从而实现对电机的精确控制。
四、脉宽调制在直流伺服电动机中的优势脉宽调制技术在直流伺服电动机中具有以下优势:1. 精确控制:脉宽调制技术可以实现对电机的精确控制,包括速度、角度和位置的精确控制。
2. 响应速度快:脉宽调制技术可以实现对电机的快速响应,提高了系统的动态性能。
3. 节能减排:脉宽调制技术可以实现能效优化,降低了能耗,减少了环境污染。
4. 成本低廉:脉宽调制技术成本低廉,便于大规模应用。
五、总结脉宽调制技术在直流伺服电动机中的应用,实现了对电机的精确控制和高效能运行。


方向信号 (a) 脉冲+方向 (b) 正脉冲+负脉冲 实验五 步进电机单轴定位控制实验一、实验目的1. 学习和掌握步进电机及其驱动器的操作和使用方法;2. 学习和掌握步进电机单轴定位控制方法;3.学习和掌握PLC 单轴定位模块的基本使用方法。
二、实验原理步进电动机是一种将电脉冲信号转换为相应的角位移或直线位移量的机电执行元件,即步进电动机输入的是电脉冲信号,输出的是角位移或直线位置。
每给一个脉冲,步进电动机转动一个角度,这个角度称为步距角。
运动速度正比于脉冲频率,角位移正比于脉冲个数。
步进电动机典型控制系统框图如图1-2-9所示。
图1-2-9 步进电动机典型控制系统框图位置控制单元可根据需要的频率和个数以及设定的加减时间控制步进电动机运动。
由于步进电动机需要正反转运动,因此定位单元的输出脉冲形式有“脉冲+方向”和“正脉冲+负脉冲”两种,它们均可控制步进电动机正反转运动。
输出脉冲形式通过参数设定来选择。
其脉冲形式如图1-2-10所示。
图1-2-10 定位模块的两种输出脉冲形式频 率 (HZ ) 脉冲数(PLS ) f 1S 2 S 3S 1由于步进电动机的电磁惯性和所驱动负载的机械惯性,速度不能突变,因此定位模块要控制升降频过程。
步进电机升、降频过程如图1-2-11。
一般情况下,S 2=S 3。
图 1-2-11 步进电机升、降频示意图其中:f 1——设定的运行频率,应小于步进电动机的最高频率;S 1——设定的总脉冲个数;S 2——升频过程中脉冲个数,由加速时间和运行频率确定;S 3——降频过程中脉冲个数,由减速时间和运行频率确定。
步进电动机驱动器将位置定位模块的输出脉冲信号进行分配并放大后驱动步进电动机的各相绕组,依次通电而旋转。
驱动器也可接受两种不同形式的脉冲信号,通过开关来选择,定位模块和驱动器的脉冲形式要相同。
另外,为了提高步进电动机的低频性能,驱动器一般具有细分功能,多个脉冲步进电动机转动一步,细分系数一般为1、2、4、8、16、32等几种,通过拨码开关来设定。
交流伺服电机控制接线图在工业自动化领域中,交流伺服电机控制是一种常见且重要的控制方式。
通过正确的接线方式,可以实现对伺服电机的精确控制,从而提高生产效率和产品质量。
接下来将介绍交流伺服电机的控制接线图及其相关内容。
1. 伺服电机接线原理伺服电机是一种能够精确控制位置、速度和转矩的电机,其原理是通过加速、减速和定位控制来完成各种运动任务。
在控制伺服电机时,需要正确连接电源、编码器、控制器等部件,才能实现预期的运动控制效果。
2. 伺服电机控制接线图示例下图为交流伺服电机的简化控制接线图示例:+----------+ +-------------+ +---------------------+ +----------+| 电源输入+------+ 电机控制器+------+ 伺服电机 +------+ 电源输出 |+----------+ +-------------+ +---------------------+ +----------+3. 接线图解析•电源输入:将外部电源接入电机控制器,提供工作电压和电流。
•电机控制器:接收来自外部信号的控制指令,控制电机的运动。
•伺服电机:根据电机控制器的指令,精确控制自身的位置、速度和转矩。
•电源输出:将经过控制的电流输出给伺服电机,驱动电机执行相应的运动任务。
4. 接线注意事项•接线前需确认电源和信号线路连接正确,避免短路和反接等问题。
•选择合适的电源和控制器,以确保伺服电机正常工作。
•定期检查接线是否松动或损坏,确保设备正常运行。
通过正确连接交流伺服电机的各个部件,可以有效实现对电机的精确控制,提高生产效率和产品质量,为工业自动化提供有力支持。
以上是关于交流伺服电机控制接线图的简要说明,希望对您有所帮助。
《基于模糊控制的高精度伺服速度控制器的设计与实现》基于模糊控制的高精度伺服速度控制器设计与实现一、引言随着工业自动化和智能制造的快速发展,高精度伺服速度控制器在生产制造和工艺控制领域中的重要性愈发突出。
伺服系统的高效性、准确性和响应速度对于设备的工作效率和产品质量的保证起到了决定性的作用。
为了更好地应对高精度速度控制的要求,本文设计并实现了一种基于模糊控制的高精度伺服速度控制器,以期为现代工业自动化提供更优的解决方案。
二、模糊控制理论概述模糊控制是一种基于模糊集合理论的控制方法,其通过模仿人的决策过程,将精确的数学模型转化为模糊的逻辑规则,从而实现对复杂系统的有效控制。
模糊控制具有对系统参数变化和外部干扰的强鲁棒性,特别适用于非线性、时变或不确定性的系统。
三、高精度伺服速度控制器的设计1. 硬件设计硬件设计是构建高精度伺服速度控制器的基石。
设计过程中,我们主要考虑了电机驱动器、传感器、微处理器等关键部件的选型和配置。
电机驱动器应具备高响应速度和低噪声的特点,传感器应具有高精度和高稳定性的性能,微处理器则应具备强大的数据处理能力和实时性。
2. 软件设计软件设计是实现高精度伺服速度控制器的核心。
在软件设计中,我们采用了模糊控制算法作为主要控制策略。
首先,我们根据系统的特性和需求,定义了输入和输出的模糊变量,并确定了模糊变量的论域和隶属度函数。
然后,我们根据专家的经验和知识,建立了模糊规则库。
最后,通过模糊推理机实现模糊规则的推理和决策,输出控制信号驱动电机执行相应的动作。
四、实现过程1. 搭建实验平台我们搭建了一个包含电机、传感器、微处理器等关键部件的实验平台,用于验证基于模糊控制的高精度伺服速度控制器的性能。
2. 编程实现在编程实现过程中,我们采用了模块化的设计思想,将整个系统划分为模糊控制器、电机驱动器、传感器数据处理等模块。
每个模块都有明确的输入和输出接口,方便后期维护和升级。
在编程过程中,我们特别注意了代码的实时性和稳定性,以保证系统的性能和可靠性。