基于PID控制器的磁悬浮系统的应用仿真
- 格式:doc
- 大小:1.04 MB
- 文档页数:21
基于PID控制的磁悬浮控制系统研究作者:罗继庚康贵荣来源:《科技视界》2013年第32期【摘要】本文介绍了PID控制算法的基本原理以及实现算法,根据实际的磁悬浮控制系统,采用临界比例带法对PID控制算法进行整定并进行仿真研究,结果表明其算法满足对系统稳定性以及有效性的要求。
【关键词】磁悬浮控制系统;PID控制;临界比例带法0 引言控制器性能的优劣直接决定系统能否正常运转,磁轴承的刚度、阻尼稳定性和回转精度主要由控制器决定。
要获得一个高品质的磁悬浮轴承系统,就必须设计合适的控制策略。
工程实践应用要求的磁悬浮轴承闭环反馈控制系统的性能指标主要有以下几个方面:1)具有较强的抗扰动能力,对系统中出现的扰动能很快地抑制消除,能尽快消除其对对象输出的影响;2)闭环反馈控制系统的响应速度要快,即要求上升时间和调节时间尽可能地短;3)闭环反馈控制系统的阻尼性能要好,动态过程超调量不能过大。
因此,设计合适的控制器,对于磁悬浮轴承控制系统具有十分重要的意义。
PID控制策略由于其具有较强的鲁棒性,物理意义比较直观明确,参数整定比较直观简单,工程应用十分广泛,所以研究磁悬浮轴承控制系统的PID控制策略设计及参数整定算法具有十分重要的意义。
1 磁悬浮轴承控制系统的模型磁轴承系统是一个非常复杂的机电一体化系统,用数学模型精确地描述是非常困难的,一般都采用在平衡点附近进行分析,再进行线性化处理。
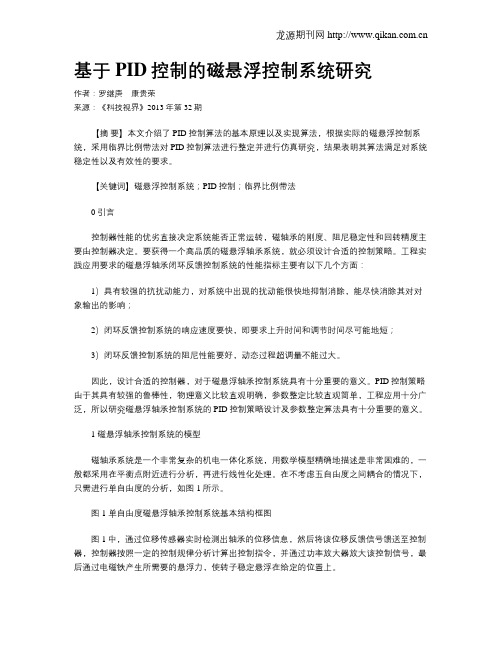
在不考虑五自由度之间耦合的情况下,只需进行单自由度的分析,如图1所示。
图1 单自由度磁悬浮轴承控制系统基本结构框图图1中,通过位移传感器实时检测出轴承的位移信息,然后将该位移反馈信号馈送至控制器,控制器按照一定的控制规律分析计算出控制指令,并通过功率放大器放大该控制信号,最后通过电磁铁产生所需要的悬浮力,使转子稳定悬浮在给定的位置上。
一般的径向磁力轴承采用八个极对称结构,C0为转子稳定悬浮时定子转子间的气隙,θ为磁极和坐标轴之间的夹角。

电磁永磁混合磁浮系统的专家PID控制仿真
刘同娟;金能强
【期刊名称】《电机与控制应用》
【年(卷),期】2005(32)8
【摘要】由于电磁永磁混合磁浮系统的悬浮磁极加了永磁部分,系统的不稳定因素增多,这就要求控制系统有更快的响应速度,更高的刚度.因此,采用自动在线调整控制参数的专家PID控制器,对整个混合悬浮控制系统进行仿真,并分析比较了专家PID 控制器与传统PID控制器,证明了专家PID控制器优越性.使系统响应速度加快,超调量减少,从而可解决磁悬浮的低刚度问题.
【总页数】3页(P29-31)
【作者】刘同娟;金能强
【作者单位】中国科学院电工研究所,北京,100080;中国科学院研究生院,北
京,100039;中国科学院电工研究所,北京,100080
【正文语种】中文
【中图分类】TP273+.5
【相关文献】
1.磁浮系统中免疫专家PID控制器的改进 [J], 宋荣荣;陈滋利
2.可控永磁悬浮系统的专家PID控制仿真 [J], 刘同娟;马向国;金能强
3.永磁电磁混合磁浮列车的永磁磁场仿真 [J], 卢志远;李德胜;董天午;叶乐志;刘安琪
4.电磁永磁混合EMS型磁浮列车的吸死防护问题研究 [J], 张颖;陈慧星;李云钢
5.混合励磁磁浮系统磁力分析及永磁体厚度对磁力影响 [J], 杜玉梅;史黎明;金能强因版权原因,仅展示原文概要,查看原文内容请购买。

基于PID控制的四分之一主动悬架仿真研究四分之一主动悬架是一种通过调节悬挂系统的阻尼和刚度来改变车辆悬挂特性的技术。
PID控制是一种经典的控制算法,可以用于调节系统的输出,以实现期望的性能。
本文将结合四分之一主动悬架和PID控制,进行仿真研究。
首先,我们需要建立四分之一主动悬架的数学模型。
四分之一主动悬架由主动悬挂器、汽车底盘质量、轮胎、地面以及传感器等组成。
根据牛顿力学原理和前馈力控制原理,可以得到四分之一主动悬架的运动方程。
其中,包括车辆质量、悬挂器质量、阻尼以及刚度等参数。
接下来,我们需要设计PID控制器来控制悬挂系统。
PID控制器由比例、积分和微分三个部分组成。
比例部分用于响应系统的当前误差,积分部分用于消除系统的积累误差,微分部分用于预测系统的未来误差。
通过调整PID控制器的参数,可以实现对悬挂系统的有效控制。
在进行仿真研究时,我们可以使用MATLAB/Simulink等工具来建立悬挂系统的数学模型,并实现PID控制算法。
首先,我们需要设置系统的输入和输出信号,并根据车辆运动学关系来计算系统的输出信号。
然后,我们可以使用PID控制器来对输出信号进行调节,并计算PID控制器的输出。
在仿真过程中,我们可以通过改变PID控制器的参数来观察系统的响应。
比如,增大比例项可以加快系统的响应速度,增大积分项可以减小系统的稳态误差,增大微分项可以提高系统的稳定性。
通过不断调整PID控制器的参数,我们可以找到最优的PID参数,以实现对悬挂系统的最佳控制。
最后,我们可以通过仿真结果来评估PID控制算法在四分之一主动悬架上的性能。
比如,我们可以通过比较不同PID参数下的系统响应曲线来评估控制效果,以及通过计算系统的稳态误差来评估控制精度。
同时,我们也可以通过计算系统的能耗来评估控制器的效率。
综上所述,基于PID控制的四分之一主动悬架仿真研究可以通过建立悬挂系统的数学模型和设计PID控制器来实现。
通过仿真研究,我们可以评估不同PID参数下的控制效果,并寻找到最优的PID参数,以实现对悬挂系统的最佳控制。



Science &Technology Vision科技视界0引言控制器性能的优劣直接决定系统能否正常运转,磁轴承的刚度、阻尼稳定性和回转精度主要由控制器决定。
要获得一个高品质的磁悬浮轴承系统,就必须设计合适的控制策略。
工程实践应用要求的磁悬浮轴承闭环反馈控制系统的性能指标主要有以下几个方面:1)具有较强的抗扰动能力,对系统中出现的扰动能很快地抑制消除,能尽快消除其对对象输出的影响;2)闭环反馈控制系统的响应速度要快,即要求上升时间和调节时间尽可能地短;3)闭环反馈控制系统的阻尼性能要好,动态过程超调量不能过大。
因此,设计合适的控制器,对于磁悬浮轴承控制系统具有十分重要的意义。
PID 控制策略由于其具有较强的鲁棒性,物理意义比较直观明确,参数整定比较直观简单,工程应用十分广泛,所以研究磁悬浮轴承控制系统的PID 控制策略设计及参数整定算法具有十分重要的意义。
1磁悬浮轴承控制系统的模型磁轴承系统是一个非常复杂的机电一体化系统,用数学模型精确地描述是非常困难的,一般都采用在平衡点附近进行分析,再进行线性化处理。
在不考虑五自由度之间耦合的情况下,只需进行单自由度的分析,如图1所示。
图1单自由度磁悬浮轴承控制系统基本结构框图图1中,通过位移传感器实时检测出轴承的位移信息,然后将该位移反馈信号馈送至控制器,控制器按照一定的控制规律分析计算出控制指令,并通过功率放大器放大该控制信号,最后通过电磁铁产生所需要的悬浮力,使转子稳定悬浮在给定的位置上。
一般的径向磁力轴承采用八个极对称结构,C 0为转子稳定悬浮时定子转子间的气隙,θ为磁极和坐标轴之间的夹角。
在忽略铁芯磁化和漏磁影响的情况下,每对极电磁铁线圈匝数为2n 匝,电磁铁的横截面积为S ,气隙为C 0。
当转子向X 轴正方向位移移动x 时,X 轴上端转子和电磁铁的位移为C 0+x cos θ,下端转子和电磁铁的位移为C 0-x cos θ。
当采用差动控制方式时,如果静态偏置电流为I 0,控制电流为i x 时,则上线圈通电流I 0-i x ,下线圈通电流I 0+i x 。
《Matlab仿真技术》设计报告题目磁悬浮系统建模及其PID控制器设计专业班级电气工程及其自动化11**班学号 2学生姓名 **指导教师**学院名称电气信息工程学院完成日期: 2014年 5 月 7 日磁悬浮系统建模及其PID控制器设计Magnetic levitation system base don PID controller simulation摘要磁悬浮技术具有无摩擦、无磨损、无需润滑以及寿命较长等一系列优点,在能源、交通、航空航天、机械工业与生命科学等高科技领域有着广泛得应用背景。
随着磁悬浮技术得广泛应用,对磁悬浮系统得控制已成为首要问题。
本设计以PID 控制为原理,设计出PID控制器对磁悬浮系统进行控制。
在分析磁悬浮系统构成及工作原理得基础上,建立磁悬浮控制系统得数学模型,并以此为研究对象,设计了PID控制器,确定控制方案,运用MATLAB软件进行仿真,得出较好得控制参数,并对磁悬浮控制系统进行实时控制,验证控制参数。
最后,本设计对以后研究工作得重点进行了思考,提出了自己得见解。
PID控制器自产生以来,一直就是工业生产过程中应用最广、也就是最成熟得控制器。
目前大多数工业控制器都就是PID控制器或其改进型。
尽管在控制领域,各种新型控制器不断涌现,但PID控制器还就是以其结构简单、易实现、鲁棒性强等优点,处于主导地位。
关键字:磁悬浮系统;PID控制器;MATLAB仿真一、磁悬浮技术简介1、概述:磁悬浮就是利用悬浮磁力使物体处于一个无摩擦、无接触悬浮得平衡状态,磁悬浮瞧起来简单,但就是具体磁悬浮悬浮特性得实现却经历了一个漫长得岁月。
由于磁悬浮技术原理就是集电磁学、电子技术、控制工程、信号处理、机械学、动力学为一体得典型得机电一体化高新技术。
伴随着电子技术、控制工程、信号处理元器件、电磁理论及新型电磁材料得发展与转子动力学得进一步得研究,磁悬浮随之解开了其神秘一方面。
1900年初,美国,法国等专家曾提出物体摆脱自身重力阻力并高效运营得若干猜想--也就就是磁悬浮得早期模型。
2019年8期创新前沿科技创新与应用Technology Innovation and Application基于Fuzzy-PID 的磁悬浮列车速度控制系统张梦乡,陈建政(西南交通大学牵引动力国家重点实验室,四川成都610031)引言磁浮列车安全性高、选线灵活、乘坐舒适性好、无污染、占地少,是解决大中城市交通问题的有效方法[1][2]。
其安全高效运行依赖于控制系统在安全速度域内精确、无时延的计算并跟踪理想速度运行,因此,设计一个跟踪性能良好的速度闭环控制器是磁浮列车运行控制的关键[3][4]。
由于磁悬浮交通系统具有轨道不平顺、空气阻力、电磁涡流阻力、悬浮气隙动态变化等特点,一般很难建立准确的列车运行动态模型[4-6]。
传统PID 控制设计速度闭环控制器控制规律过于简单,无法适应各阶段系统模型变化。
Fuzzy-PID 控制把专家的经验表示成模糊语言描述的控制规则,在被控对象控制模型存在误差的情况下,通过在线调整参数就能达到良好的控制效果,对复杂、建模困难的系统均能有效控制,非常适用于具有时变干扰和非线性的磁浮列车运控系统[7][8]。
本文以某建设中试验线为工程背景,设计了基于Fuzzy-PID 控制的速度闭环控制器,跟踪理想速度曲线运行,改善运行控制系统动态性能。
1磁浮列车运控模型磁浮列车在运行过程中沿轨道方向的合力F 可表达为电磁牵引力F q 、电磁涡流阻力F b 、空气阻力F a 和坡道阻力F i 的合力[4],如式(1)和式(2)所示。
(2)其中,n 为列车编组个数,M 为列车质量,ψd 、ψq 和i d 、i q分别为定子绕组的磁链分量和电流分量,P l 为空气密度,C x 为空气阻尼系数,S f 为列车前端面积,I (s)为坡度的分段千分度函数。
由于列车速度v 、加速度a 、位置s 满足基本运动学方程a=dv/dt ,v=ds/dt 。
根据F=Ma 和式(1)可得磁浮列车运控图1运控系统开环模型基于Fuzzy-PID 控制的速度控制系统如图2所示,模糊控制器通过在线调整PID 比例系数K P 、微分系数K d 和积分系数K i 的修正量ΔK P 、ΔK d 、ΔK i ,使得该系统具有适应时变性和非线性的优点,并提高了系统的动态响应性能。
题目基于PID控制器的磁悬浮系统的应用仿真摘要磁悬浮技术具有无摩擦、无磨损、无需润滑以及寿命较长等一系列优点,在能源、交通、航空航天、机械工业和生命科学等高科技领域有着广泛的应用背景。
随着磁悬浮技术的广泛应用,对磁悬浮系统的控制已成为首要问题。
本设计以PID控制为原理,设计出PID控制器对磁悬浮系统进行控制。
在分析磁悬浮系统构成及工作原理的基础上,建立磁悬浮控制系统的数学模型,并以此为研究对象,设计了PID控制器,确定控制方案,运用MATLAB软件进行仿真,得出较好的控制参数,并对磁悬浮控制系统进行实时控制,验证控制参数。
最后,本设计对以后研究工作的重点进行了思考,提出了自己的见解。
PID控制器自产生以来,一直是工业生产过程中应用最广、也是最成熟的控制器。
目前大多数工业控制器都是PID控制器或其改进型。
尽管在控制领域,各种新型控制器不断涌现,但PID控制器还是以其结构简单、易实现、鲁棒性强等优点,处于主导地位。
关键字:磁悬浮系统;PID控制器;MATLAB仿真IAbstractMagnetic suspension technology, which has a series of advantages such as contact-free, no friction, no wear, no need of lubrication and long life expectancy, is widely concerned and adopted in high-tech areas such as energy, transportation, aerospace, industrial machinery and life science.With the extensive application of maglev technology, the control of the maglev system has become a priority. In this paper, for the principle of PID control, PID controller designed to control magnetic suspension system.On the basis of analyzing of magnetic suspension system’s structure and working principle, its system mathematical model was established, this thesis describe PID controller designed and get control scheme. It gets the better control parameters by MATLAB software simulation studies, and real-time control of magnetic suspension control system to verify the control parameters. The key research works for further study are proposed at last.Since PID controllers have been the process of industrial production has been most widely and most sophisticated controller. Most industrial controllers are PID controllers or modified. While in the control area, a variety of new controllers continue to emerge, but the PID controller is its simple structure, easy to implement, robust, etc., in a dominant position.Key words: magnetic suspension system; PID controller; MATLAB simulationII目录摘要 (I)Abstract (II)1 绪言 (1)1.1 磁悬浮技术综述 (1)1.2 磁悬浮技术的应用与展望 (1)2 磁悬浮系统的结构 (2)2.1 系统组成 (2)2.2 磁悬浮实验本体 (2)2.3 磁悬浮实验电控箱 (2)2.4 磁悬浮实验平台 (3)3 磁悬浮系统的建模 (4)3.1 磁悬浮系统的工作原理 (4)3.2 控制对象的运动方程 (5)3.3 控制系统的电磁模型 (5)3.4 电磁铁系统数学模型 (6)3.5 磁悬浮系统数学模型 (6)4 PID控制器的设计 (8)4.1 控制方案的选择 (8)4.2 PID控制器 (9)5 MATLAB仿真 (11)5.1 MATLAB简介 (11)5.2 磁悬浮系统仿真 (12)5.3 PID参数整定 (13)致谢 (17)参考文献 (18)1 绪论1.1 磁悬浮技术综述磁悬浮技术属于自动控制技术,它是随着控制技术的发展而建立起来的。
磁悬浮的作用是利用磁场力使某一物体沿着或绕着某一基准框架的一轴或几轴保持固定位置。
由于悬浮体和支撑之间没有任何接触,克服了由摩擦带来的能量消耗和速度限制,具有寿命长、能耗低、无污染、无噪声、不受任何速度限制、安全可靠等优点,因此目前世界各国已广泛开展磁悬浮控制系统的研究。
随着控制理论的不断完善和发展,采用先进的控制方法对磁悬浮系统进行的控制和设计,使系统具有更好的鲁棒性。
随着电子技术的发展,特别是电子计算机的发展,带来了磁悬浮控制系统向智能化方向的快速发展。
目前,关于磁悬浮技术的研究与开发在国内外都处于快速发展之中。
磁悬浮技术从原理上来说不难以理解,但是真正将其产业化却是近几年才开始的。
1.2 磁悬浮技术的应用及展望20世纪60年代,世界上出现了3个载人的气垫车试验系统,它是最早对磁悬浮列车进行研究的系统。
随着技术的发展,特别是固体电子学的出现,使原来十分庞大的控制设备变得十分轻巧,这就给磁悬浮列车技术提供了实现的可能。
1969年,德国牵引机车公司的马法伊研制出小型磁悬浮列车模型,以后命名为TR01型,该车在1km轨道上的时速达165km,这是磁悬浮列车发展的第一个里程碑。
在制造磁悬浮列车的角逐中,日本和德国是两大竞争对手。
1994年2月24 日,日本的电动悬浮式磁悬浮列车,在宫崎一段74km长的试验线上,创造了时速431km的日本最高纪录。
1999年4月,日本研制的超导磁悬浮列车在试验线上达到时速552km。
德国经过近20年的努力,技术上已趋于成熟,已具有建造运用的水平。
原计划在汉堡和柏林之间修建第一条时速为400km的磁悬浮铁路,总长度为248km,预计2003年正式投入营运。
但由于资金计划问题,2002年宣布停止了这一计划。
我国对磁悬浮列车的研究工作起步较晚,1989年3月,国防科技大学研制出我国第一台磁悬浮试验样车。
1995年,我国第一条磁悬浮列车实验线在西南交通大学建成,并且成功进行了稳定悬浮、导向、驱动控制和载人等时速为300km 的试验。
西南交通大学这条试验线的建成,标志我国已经掌握了制造磁悬浮列车的技术。
然而,2001年3月上海13.8km的磁悬浮列车开始营运,标志着我国成为世界上第一个具有磁悬浮运营铁路的国家。
2 磁悬浮系统的结构2.1 系统组成本设计所使用的磁悬浮实验装置系统,是由固高科技有限公司所生产的磁悬浮实验装置GML1001。
此磁悬浮实验装置由LED光源、电磁铁、光电传感器、功放模块、模拟量控制模块、数据采集卡和被控对象(钢球)等元器件组成,其结构简单,实验控制效果直观明了,极富有趣味性。
它是一个典型的吸浮式悬浮系统。
此系统可以分为磁悬浮实验本体、电控箱及由数据采集卡和普通PC机组成的控制平台等三大部分。
系统组成主要由所需设计的PID控制器,以电磁铁为执行器,小球位置传感器和被控对象钢球组成,系统框图如图1所示。
图1 磁悬浮控制系统框图2.2 磁悬浮实验本体电磁铁绕组中通以一定的电流或者加上一定的电压会产生电磁力,控制电磁铁绕组中的电流或者绕组两端的电压,使之产生的电磁力与钢球的重量相平衡,钢球就可以悬浮在空中而处于平衡状态。
但是这种平衡状态是一种不稳定平衡。
此系统是一开环不稳定系统。
主要有以下几个部分组成:箱体、电磁铁、传感器。
2.3 磁悬浮实验电控箱电控箱内安装有如下主要部件:直流线性电源、传感器后处理模块、电磁铁驱动模块、空气开关、接触器、开关、指示灯等电气元件。
2.4 磁悬浮实验平台与IBM PC/AT机兼容的PC机,带PCI总线插槽,PCI1711数据采集卡及其驱动程序演示实验软件。
磁悬浮系统是一个典型的非线性开环不稳定系统。
电磁铁绕组中通以一定的电流或者加上一定的电压会产生电磁力,控制电磁铁绕组中的电流或电压,使之产生的电磁力与钢球的重力相平衡,钢球就可以悬浮在空中而处于平衡状态。
但是这种平衡状态是一种开环不稳定的平衡,这是由于电磁铁与钢球之间的电磁力大小与它们之间的距离的平方成反比,只要平衡状态稍微受到扰动(如:加在电磁铁线圈上的电压产生脉动、周围的震动等),就会导致钢球掉下来或被电磁铁吸住,不能稳定悬浮,因此必须对系统实现闭环控制。
由LED光源和传感器组成的测量装置检测钢球与电磁铁之间的距离变化,当钢球受到扰动下降,钢球与电磁铁之间的距离增大,传感器感受到光强的变化而产生相应的变化信号,经(数字或模拟)控制器调节、功率放大器放大处理后,使电磁铁控制绕组中的控制电流相应增大,电磁力增大,钢球被吸回平衡位置。
3 磁悬浮系统的建模3.1 磁悬浮系统的工作原理磁悬浮控制系统由铁心、线圈、光位移传感器、控制器、功率放大器和被控对象(钢球)等元器件组成。
它是一个典型的吸浮式悬浮系统。
系统开环结构如图4所示。
图2系统开环结构图电磁铁绕组中通以一定的电流会产生电磁力,控制电磁铁绕组中的电流,使之产生的电磁力与钢球的重力相平衡,钢球就可以悬浮于空中而处于平衡状态。
但是这种平衡是一种不稳定平衡,这是由于电磁铁与钢球之间的电磁力的大小与它们之间的距离)(t x 成反比,只要平衡状态稍微受到扰动(如:加在电磁铁线圈上的电压产生脉动、周围的振动、风等),就会导致钢球掉下来或被电磁铁吸住,因此必须对系统实现闭环控制。
由电涡流位移传感器检测钢球与电磁铁之间的距离()x t 变化,当钢球受到扰动下降,钢球与电磁铁之间的距离()x t 增大,传感器输出电压增大,经控制器计算、功率放大器放大处理后,使电磁铁绕组中的控制电流相应增大,电磁力增大,钢球被吸回平衡位置,反之亦然。