基于PLC的液压站精确定位PID控制系统
- 格式:pdf
- 大小:196.72 KB
- 文档页数:3

目录1 《控制系统集成实训》任务书 (2)2 总体设计方案 (4)2.1 系统组成 (4)2.2 水箱液位控制系统构成 (4)2.3 水箱液位控制系统工作原理 (5)2.4 仪表选型 (6)2.4.1 GK-01电源控制屏 (6)2.4.2 GK-02传感器输出与显示 (7)2.4.3 GK-03单片机控制 (7)2.4.4 GK-07交流变频调速 (8)2.4.4 GK-08 PLC可编程控制 (8)2.5 PLC设计流程图 (9)3 外部接线图 (10)4 I/0分配 (10)5 梯形图 (11)6 组态王界面 (15)6.1 主界面 (16)6.2 数据词典 (16)6.3 曲线监控 (17)6.4 水流动画程序 (18)7 调试和运行结果 (19)7.1 比例控制 (19)7.2 比例积分调节 (19)心得体会 (21)参考文献 (22)1.《控制系统集成实训》任务书题目:基于PLC和组态王的液位PID控制系统一、实训任务本课题要求设计液位PID控制系统,它的任务是使水箱液位等于给定值所要求的高度,并通过PID控制减小或消除来自系统内部或外部扰动的影响。
1.实训模块:1、THKGK-1过程控制实验装置GK-02、GK-07、GK-08。
2、计算机及STEP7运行环境(安装好演示程序)、MPI电缆线,组态王软件。
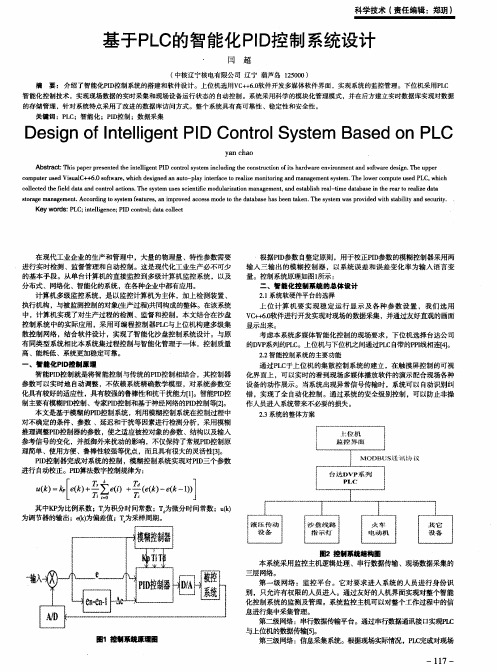
2.控制原理和控制要求:控制原理如图所示,测量值信号由S7-200PLC的AI通道进入,经程序比较测量值与设定值的偏差,然后通过对偏差的P或PI或PID调节得到控制信号(即输出值),并通过S7-200PLC 的AO通道输出。
用此控制信号控制变频器的频率,以控制交流电机的转速,从而达到控制水位的目的。
S7-200PLC和上位机进行通讯,并利用上位机组态王软件实现给定值和PID参数的设置、手动/自动无扰动切换、实时过程曲线的绘制等功能。
二、实训目的通过本次实训使学生掌握:1)实际控制方案的设计;2)编程软件的使用方法和梯形图语言的运用;2)程序的设计及实现方法;3)程序的调试和运行操作技术。

基于PID控制的液压系统优化设计液压系统是工业和机械领域中常见的一种动力传输系统,它通过液压油作为媒介来传递能量和信号。
在液压系统中,PID控制器经常被用来调节和控制系统的输出。
本文将探讨基于PID控制的液压系统优化设计。
一、背景介绍液压系统是一种复杂的动力传输系统,其主要由液压泵、执行元件和控制系统组成。
在液压系统中,控制系统起着至关重要的作用,它可以决定液压系统的输出效果和性能稳定性。
PID控制器是一种常见的控制算法,它通过调节系统的输出来使得系统的误差最小化,以达到控制目标。
二、PID控制器的原理PID控制器是由比例(P)、积分(I)和微分(D)三个部分组成的。
比例部分根据系统输出与期望值的偏差大小来调节控制输出;积分部分根据系统输出与期望值的偏差累积量来调节控制输出;微分部分根据系统输出的变化速率来调节控制输出。
通过调节比例、积分和微分的权重,PID控制器可以实现对系统的精确控制。
三、基于PID控制的液压系统设计基于PID控制的液压系统设计的首要任务是确定控制目标和性能需求。
根据液压系统的具体应用和要求,可以确定液压系统的期望输出和误差允许范围。
接下来,需要确定合适的传感器和执行元件,并设置合适的信号采样和控制周期。
在设计PID控制器时,需要根据系统的动态特性进行参数调整。
可以通过试验和仿真来获得系统的频率响应曲线,并根据曲线特性来确定PID控制器的参数。
比例增益可以调节系统的稳定性和动态响应速度,积分时间常数可以调节系统的稳态误差,微分时间常数可以提高系统的抗扰性能。
四、优化设计中的挑战和解决方案液压系统在设计过程中面临着一些挑战,如系统动态特性不稳定、参数变化和负载变化等。
这些因素可能导致PID控制器的性能下降和系统的不稳定性。
为了解决这些问题,可以采用自适应PID控制器、模糊PID控制器或者模型预测控制器等方法来提高系统的控制性能。
自适应PID控制器可以根据系统的参数变化和负载变化来自动调整PID参数,以保持系统的稳定性和性能。
基于PLC 控制的液压控制系统[摘要] 采用可编程控制器(PLC)代替继电器控制器,对机械手的液压驱动系统进行控制,通过输入输出接口建立与机械手液压系统开关量和模拟量的联系,实现机械手搬运工件的顺序动作和自动控制,达到准确度高、控制方便、可靠性好的目标,大大提高了生产率和自动化程度,减少了系统故障,具有很强的实用性。
[关键词]PLC;液压控制;机械手1、前言( Introduction)目前PLC 在工业生产过程控制自动化和传统产业技术改造等方面得到了广泛应用,与传统的继电器控制相比, PLC 具有控制系统构成简单、可靠性高、通用性强、抗干扰能力强、易于编程、体积小、可在线修改、设计与调试周期短、便于安装和维修等突出优点, 而且一般不需要采取什么特殊措施,就能直接在工业环境中使用,更加适合工业现场的要求,使用PLC 控制液压控制系统能提高系统的整体性能,具有较明显的优越性.本文介绍基于PLC 控制的某液压机械手的典型液压控制回路及其PLC 控制方法。
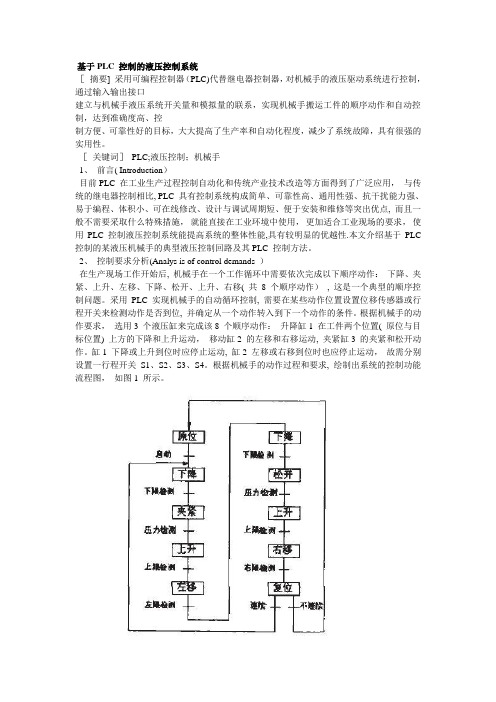
2、控制要求分析(Analys is of control demands )在生产现场工作开始后, 机械手在一个工作循环中需要依次完成以下顺序动作:下降、夹紧、上升、左移、下降、松开、上升、右移( 共8个顺序动作), 这是一个典型的顺序控制问题。
采用PLC 实现机械手的自动循环控制, 需要在某些动作位置设置位移传感器或行程开关来检测动作是否到位, 并确定从一个动作转入到下一个动作的条件。
根据机械手的动作要求,选用3 个液压缸来完成该8 个顺序动作:升降缸1 在工件两个位置( 原位与目标位置) 上方的下降和上升运动,移动缸2 的左移和右移运动, 夹紧缸3 的夹紧和松开动作。
缸1 下降或上升到位时应停止运动, 缸2 左移或右移到位时也应停止运动,故需分别设置一行程开关S1、S2、S3、S4。
根据机械手的动作过程和要求, 绘制出系统的控制功能流程图,如图1 所示。
液压站温度系统的PID控制PID控制是一种常用的控制方法,通过对比输入信号(被控变量)和设定值,利用比例、积分和微分三个控制系数来调节输出信号(控制变量)的大小,从而使被控对象的特性达到预期的目标。
在液压站温度系统的PID控制中,可以通过以下步骤进行设置和调试:1.设定目标温度值:根据实际需求和液压设备的要求,设定合理的目标温度值。
2.传感器安装:安装温度传感器或温度探头,以获取实时的液压油温度。
3.控制器选择:选择适用于液压站温度控制的PID控制器,可以选择基于微控制器的数字PID控制器来实现。
4.参数调整:根据实际系统的特性,通过实验和调试的方式来调整PID控制器的参数。
这包括比例系数(P)、积分时间(I)和微分时间(D)等。
-比例系数(P):通过调整比例系数,可以控制控制器输出对被控变量的影响程度。
较大的比例系数将导致控制器更加敏感,但容易引起振荡和不稳定性。
较小的比例系数会减小控制器对被控变量的响应,可能导致控制效果较差。
-积分时间(I):通过调整积分时间,可以消除比例控制带来的稳态误差。
较大的积分时间会增加系统的稳定性,但可能导致响应速度较慢。
较小的积分时间可能会导致系统不稳定。
-微分时间(D):通过调整微分时间,可以提高系统的响应速度和稳定性。
较大的微分时间会增加系统对变化的敏感性,但可能引起噪声干扰。
较小的微分时间可能会导致系统响应不够灵敏。
5.反馈信号处理:将实时采集到的温度数据传输给PID控制器,让控制器根据设定值和实际值进行计算,得到控制变量的输出。
6.控制变量输出:控制器输出的控制变量,通过执行器(如电磁阀)将控制信号传递到液压系统中,调节系统的工作状态以达到控制目标。
7.参数调优:根据实际反馈效果,继续调整和优化PID控制器的参数,以达到更好的控制效果。
可以通过试错法、频率响应等方法进行参数调整。
总结来说,液压站温度系统采用PID控制可以通过设定目标温度值、传感器安装、控制器选择、参数调整、反馈信号处理、控制变量输出和参数调优等步骤来实现对液压油温度的精确控制。
基于PLC的液压机控制系统设计文章主要介绍了液压机系统的工作原理、特点以及研究现状。
从设计角度出发,分析液压系统的工艺流程;根据液压系统的工艺特点设计电气控制系统,分析在电气控制与液压系统的自动、手动控制方式,编写PLC程序,最终由PLC 程序控制液压系统形成一个统一的控制系统整体,达到利用自动化手控制液压系统完成特定的工作行程。
系统通过程序指令控制电路,执行速度快,克服了电磁继电器动作时间长触点抖动的缺点。
并达到所需精度,改善了控制效果,提高了设备的可靠性。
标签:液压传动;PLC控制;液压机1 概述液压传动与控制是以液体作为介质来实现各种机械量的输出(力、位移或速度等)的。
它与单纯的机械传动、电气传动和气压传动相比,其单位重量的输出功率和单位尺寸输出功率大;液压传动装置体积小、结构紧凑、布局灵活,易实现无级调速,调速范围宽,便于与电气控制相配合实现自动化[1,2];易实现过载保护与保压,安全可靠;元件易于实现系列化、标准化、通用化;液压易与微机控制等新技术相结合,构成“机-电-液-光”一体化便于实现数字化[3,4]。
因此,其广泛应用于各种机械设备及精密的自动控制系统,发展速度迅速[5]。
液压机就是该控制理论一个典型应用。
液压机工艺用途广泛,适用于弯曲、翻边、拉伸、成型和冷挤压等冲压工艺,也可适用于校正和压装等工艺。
PLC 以其高可靠性、强抗干扰性、良好的通用性等优点在工业控制的各个领域得到日益广泛的应用[6,7]。
特别是在液压机的液压控制系统中,PLC已得到普遍应用和发展,而且这一趋势仍将继续。
2 工艺流程铝型材液压机是一种把铝或铝合金棒料挤压成各种规格型材的机器液压机工作时,铝棒坯料由加热炉加热到所需挤压温度,然后送至供锭器中,供锭器自动把坯料和挤压垫送至模筒口,由工作缸活塞推模筒直至模口,并在快速推料过程中,供锭器自动复位,同时,挤压筒及模具进行预热,最后,由工作缸进行挤压加工。
在挤压过程中,棒料靠装在挤压筒内的电热元件保持一定的温度挤压结束后,由剪切装置将制品与压余分离,剩料和压垫掉人残料溜槽,压机各部件全部复原,一次挤压加工结束。
智能液压挖掘机控制系统的设计概述在现代工程领域,液压挖掘机是一种常见而重要的工程机械。
为了提高挖掘机的控制性能和准确性,智能液压挖掘机控制系统逐渐应用于该领域。
本文将介绍一种基于PID方法的智能液压挖掘机控制系统的设计。
PID控制器介绍PID控制器是一种经典的控制器设计方法,它由比例(P)、积分(I)和微分(D)三个部分组成。
比例控制部分根据目标值和实际值的误差来提供输出信号;积分控制部分将误差进行积分,并根据积分结果调整输出信号;微分控制部分则根据误差变化率对输出信号进行调整。
PID控制器通过不断调整控制参数,使得系统的输出值逐渐接近目标值。
智能液压挖掘机控制系统的设计智能液压挖掘机控制系统基于PID方法,通过对挖掘机的各项参数进行实时监测和控制,实现对挖掘机的智能化控制。
系统硬件设计智能液压挖掘机控制系统的硬件设计主要包括传感器、执行机构和控制器。
传感器用于实时采集挖掘机的关键参数,例如挖掘机的位置、速度和负载。
执行机构用于根据控制信号对挖掘机进行相应的动作,例如挖掘机的起升、回转和伸缩。
控制器是系统的核心,它接收传感器采集的数据,并根据PID控制算法计算出相应的控制信号,然后将控制信号发送给执行机构。
系统软件设计智能液压挖掘机控制系统的软件设计主要包括数据处理和控制算法两个部分。
数据处理模块用于接收传感器采集的数据,并对数据进行滤波和处理,以提高数据的准确性和稳定性。
控制算法模块则根据PID控制算法对处理后的数据进行计算,得到相应的控制信号,并将控制信号发送给执行机构。
控制算法模块可以通过软件调整PID参数,以适应不同工况下的挖掘机控制需求。
系统性能测试为了评估智能液压挖掘机控制系统的性能,可以进行一系列的实验和测试。
例如,测试系统在不同负载下的控制精度和稳定性,测试系统对动作速度的控制能力等。
通过这些测试,可以对系统进行优化和改进,提高系统的控制性能和可靠性。
结论智能液压挖掘机控制系统的设计基于PID方法,通过对挖掘机的各项参数进行实时监测和控制,可以实现挖掘机的智能化控制。