三次非均匀B样条曲面的绘制
- 格式:doc
- 大小:101.50 KB
- 文档页数:2
B样条曲面构建算法设计与实现
B样条曲面是一种常用的曲面表示方法,它通过控制顶点和控制多项式来构建曲面。
B 样条曲面的构建算法设计与实现涉及以下几个步骤:
1. 控制顶点的设计:B样条曲面的形状由一系列控制顶点决定,因此首先需要设计控制顶点的布局。
可以根据曲面的形状需求,选择合适的顶点布局方式,如网格状、均匀分
布或非均匀分布等。
2. 控制多项式的选择:控制多项式是用来计算曲面上某一点坐标的关键因素。
可以
选择二次、三次或更高次的多项式来控制曲面的平滑度和形状,通常使用三次多项式来构
建B样条曲面。
3. 节点向量的计算:B样条曲面的构建需要计算节点向量,用于计算控制顶点的权重。
节点向量可以通过均匀分布或非均匀分布的方式来确定,常用的非均匀分布方式有均匀B
样条和非均匀B样条。
4. 曲面点的计算:根据控制顶点、节点向量和控制多项式,可以计算B样条曲面上每个点的坐标。
通过遍历曲面上的离散点,根据B样条基函数的公式计算每个点的坐标,然
后将得到的坐标进行插值,得到曲面上的所有点。
5. 曲面细化与调整:通过调整控制顶点和节点向量,可以对B样条曲面进行细化和调整,以获得更加精确和符合需求的曲面形状。
可以通过改变顶点的位置和权重,或调整节
点向量的值,来实现对曲面形状的调整。
在实现B样条曲面的算法时,可以使用计算机图形学相关的工具和库,如OpenGL、OpenCV等,利用它们提供的函数和方法来实现控制顶点的布局、计算节点向量和曲面点的坐标等操作。
同时,也可以根据具体需求,自行设计和实现B样条曲面的算法,以满足特
定的应用需求。
一种基于矩阵形式的以B样条为母线的旋转曲面
刘志平
【期刊名称】《淮海工学院学报(自然科学版)》
【年(卷),期】2012(021)004
【摘要】旋转曲面是一类非常重要的曲面形式,给出了以B样条为母线的旋转曲面的构造方法.首先推导了三次非均匀B样条曲线的矩阵表示形式,再给出绕固定轴旋转的旋转变换矩阵,以此为基础得到旋转曲面的矩阵表示.利用给出的旋转曲面表示方法,可以很容易地使用各种数学应用软件绘制出指定的旋转曲面.最后,给了一个具体实例,并用Matlab绘制出了该旋转曲面.
【总页数】3页(P11-13)
【作者】刘志平
【作者单位】淮海工学院理学院,江苏连云港 222005
【正文语种】中文
【中图分类】O182.2
【相关文献】
1.基于推广B样条的非齐次旋转曲面细分生成 [J], 王莹;方美娥
2.计算曲线天线电流分布的一种新途径:参数形式下的B样条有限元法… [J], 李融林;俞集辉
3.一种基于矩阵LU分解的分段B样条插值法 [J], 谢志鹏;施建文
4.均匀B样条曲线的一种表示形式 [J], 陆晓岚;杭后俊
5.三次均匀B样条插值曲线和曲面的矩阵形式 [J], 符祥;郭宝龙
因版权原因,仅展示原文概要,查看原文内容请购买。
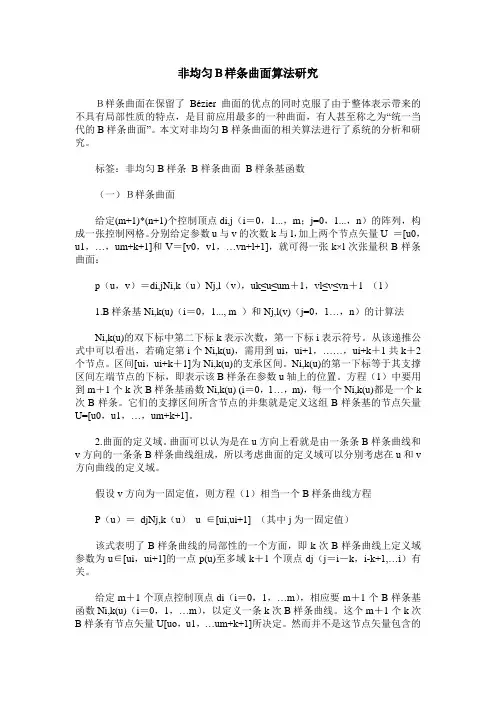
非均匀B样条曲面算法研究B样条曲面在保留了Bézier曲面的优点的同时克服了由于整体表示带来的不具有局部性质的特点,是目前应用最多的一种曲面,有人甚至称之为“统一当代的B样条曲面”。
本文对非均匀B样条曲面的相关算法进行了系统的分析和研究。
标签:非均匀B样条B样条曲面B样条基函数(一)B样条曲面给定(m+1)*(n+1)个控制顶点di,j(i=0,1...,m;j=0,1...,n)的阵列,构成一张控制网格。
分别给定参数u与v的次数k与l,加上两个节点矢量U =[u0,u1,…,um+k+1]和V=[v0,v1,…vn+l+1],就可得一张k×l次张量积B样条曲面:p(u,v)=di,jNi,k(u)Nj,l(v),uk≤u≤um+1,vl≤v≤vn+1 (1)1.B样条基Ni,k(u)(i=0,1..., m )和Nj,l(v)(j=0,1…,n)的计算法Ni,k(u)的双下标中第二下标k表示次数,第一下标i表示符号。
从该递推公式中可以看出,若确定第i个Ni,k(u),需用到ui,ui+1,……,ui+k+1共k+2个节点。
区间[ui,ui+k+1]为Ni,k(u)的支承区间。
Ni,k(u)的第一下标等于其支撑区间左端节点的下标,即表示该B样条在参数u轴上的位置。
方程(1)中要用到m+1个k次B样条基函数Ni,k(u) (i=0,1…,m),每一个Ni,k(u)都是一个k 次B样条。
它们的支撑区间所含节点的并集就是定义这组B样条基的节点矢量U=[u0,u1,…,um+k+1]。
2.曲面的定义域。
曲面可以认为是在u方向上看就是由一条条B样条曲线和v方向的一条条B样条曲线组成,所以考虑曲面的定义域可以分别考虑在u和v 方向曲线的定义域。
假设v方向为一固定值,则方程(1)相当一个B样条曲线方程P(u)=djNj,k(u)u ∈[ui,ui+1] (其中j为一固定值)该式表明了B样条曲线的局部性的一个方面,即k次B样条曲线上定义域参数为u∈[ui,ui+1]的一点p(u)至多域k+1个顶点dj(j=i-k,i-k+1,…i)有关。
三次B样条反求控制点王凌云【摘要】反求工程作为复杂工业产品设计与制造的重要技术手段之一,深受CAD/CAM领域的广泛重视,特别是自由曲面重构技术作为复杂曲面产品反求工程中的"瓶颈"问题,是今后一个时期的研究热点.反求工程中最为关键的技术就是曲面重构技术.目前主要有两大重构方法:NURBS曲面重构和三角Bezier曲面重构.本文围绕NURBS曲面重构展开研究,提出一种反算三次B样条曲线、曲面控制顶点的简便算法.该算法适用于准均匀和非均匀B样条曲线、曲面的反算.算法采用非节点边界条件,不需要由用户提供, 从而使反算过程得以简化.【期刊名称】《泰山学院学报》【年(卷),期】2010(032)003【总页数】4页(P40-43)【关键词】反求工程;非均匀有理B样条;型值点;控制点【作者】王凌云【作者单位】山东服装职业学院,科研所,山东,泰安,271000【正文语种】中文【中图分类】TP301.6在CACG实践中,常遇到要求构造插值曲线和插值曲面,以用于已有曲线曲面的形状表示.NURBS方法为标准解析形式的初等曲线曲面和自由型曲线曲面的精确表示和设计提供了一个公共的数学表示,有操纵控制顶点及权因子,为各种形状设计提供了充分的灵活性,由于非均匀有理B样条(NURBS)可以精确表示解析形状和自由曲线曲面,国际标准组织于1991年把NURBS作为表示工业产品几何形状的工业标准. NURBS曲线曲面在实际应用中可以分为两种形式:一种是已知控制点求解曲线曲面上的点,称为正算问题.另一种情况是已知曲线曲面上的型值点,求解曲线曲面的控制点,称为反算问题.在实际应用中,常常是给出一组离散的型值点,要求构造通过该型值点的曲线曲面,即所谓的曲线曲面插值.文中只讨论三次NURBS曲线问题,给出反算控制点的方法.1.1 B样条基础知识B样条方法是以距离加权插值法为基础,以数据点为型值点反求其控制点,然后将B 样条曲面看作是两个不同方向的B样条曲线的直积,避免复杂的矩阵运算.B条曲面由于其本身具有的跨界曲率自连续性使得曲面片间的光顺性问题得以简化.其中di(i=0,1,…,n)为控制顶点,又成为德布尔点,顺序连成的折线又称为B样条控制多边形, Ni,k(u)(i=0,1,…,n)称为规范k次B样条基函数,是由节点矢量U=[u0,u1,…,un+k+1]按Cox-De Boor递推公式定义的k次规范B样条基函数,表示如下:按照如上定义,在定义式中取k=3就是一条三次NURBS曲线的数学表达式.一般常用的是非均匀有理B样条,它采用非均匀节点矢量,并在两端点处采用重节点技术,使得曲线严格地插值于首末端点,工程中,一般三次B样条曲线曲面己经能满足实际的需求了.1.2 B样条曲线反算的一般过程a)根据型值点的分布趋势,构造非均匀节点矢量. b)应用计算得到的节点矢量构造非均匀B样条基. c)构建控制点反算的系数矩阵.d)建立控制点反算方程组,求解控制点列.其中,B样条基函数的求值是关键.1.2.1 假设规定为使一k次B样条曲线通过一组数据点qi(i=0,1,…,m),反算过程一般地使曲线的首末端点分别和首末数据点一致,使曲线的分段连接点分别依次与B样条曲线定义域内的节点一一对应.即qi点有节点值uk+i(i=0,1,…,m).1.2.2 三次B样条插值曲线节点矢量的确定曲线控制点反算时一般使曲线的首末端点分别与首末型值点一致,型值点pi(i=0,1,…,n)将依次与三次NURBS曲线定义域内的节点一一对应.三次NURBS插值曲线将由n+3个控制点di(i= 0,1,…,n+2)定义,相应的节点矢量为U=[u0,u1,…,un+6].为确定与型值点相对应的参数值ui+3(i=0,1,…,n),需对型值点进行参数化处理.选择ui一般采取以下方法:(1)均匀参数化法:1.2.3 反算三次B样条曲线的控制顶点给定n+1个数据点pi,i=0,1,…,n.通常的算法是将首末数据点p0和pn分别作为三次B样条插值曲线的首末端点,把内部数据点p1,p2,…,pn-1依次作为三次B样条插值曲线的分段连接点,则曲线为n段.因此,所求的三次B样条插值曲线的控制顶点bi,i=0,1,…,n+2应为n+3个.节点矢量U=[u0,u1,…,un+6],曲线定义域u∈[u3,un+3].B样条表达式是一个分段的矢函数,并且由于B样条的局部支撑性,一段三次B样条曲线只受4个控制点的影响,下式表示了一段B样条曲线的一个起始点:式中ui+3为起始点的参数值,i∈[0,m-4],通过该式可获得m-3个分段曲线的起始点.由于采用了重节点技术,末端型值点与控制点重合,则p0=V0;pm-3=Vm-1.则反求控制点方程组如下:该方程组有m个未知数Vj,而方程的个数是m-2个.为此,还需补充两个端点条件:对于C2连续的三次B样条闭曲线,因为首末数据点相重,q0=qm,不计重复,方程减少一个,又首末三个控制点依次相重,即dn-2=d0,dn-1=d0,dn=d2;未知控制点的数目减少了三个,所以方程个数与未知数个数相同,上述线性方程组可改写成如下矩阵形式,解方程,即可求出全部控制点.对于B样条开曲线以及不要求在相重的首末数据点q0=qm处C2连续的三次B 样条B曲线,n-1个方程不足以决定其包含的n+1个未知控制顶点,还必须增加两个通常由边界条件给定的附加方程,这样求解三次B样条控制顶点的线性方程组可以写成如下矩阵形式.2.1 B样条曲面重构对于B样条曲面的重构,实际上就是已知型值点Qij(i=0,1,…,m;j=0,1,…,n);求相应均匀双三次B样条曲面的控制点阵pij(i=-1,0,1,…,m+1;j=-1,0,1,…,n+1)具体的方法就是:1)对u向的n+1组型值点,按照B样条曲线的边界条件及反算公式,求得由n+1组B样条曲线构成的控制多边形,这里每条曲线均要加两个边界条件,故会得到(m+3)*(n+1)个特征网格控制点Vij(i=-1,0,1,…,m+1;j=-1,0,1,…,n+1).2)把Vij看作是v向的(m+3)次B样条曲线反算,即可得到双三次B样条曲面的控制点pij(i=-1,0, 1,…,m+1;j=-1,0,1,…,n+1).如果从0开始算点,pij(i=0,1,…,m+2;j=0,1,…,n+2).2.2 插值曲面的光顺性问题利用上述方法得到的曲面,在片内满足C2连续,但在片间的公共边界以及多个片相交的角点处,只满足了位置连续,需要进行光顺处理.光顺方法大体上可以分为两大类:局部光顺法和整体光顺法.局部光顺法只是对少数“坏点”进行修改,具有较强的局部修改能力,并且计算速度快,但是“坏点”较多时光顺的效果不理想;整体光顺法是对全部型值点进行修改,曲面整体光顺效果较为理想,但计算量大,收敛速度慢.光照反射特性法属于整体光顺法,通过反射线来检查曲面的光顺性.能量法是典型的整体光顺法,使曲面的整体能量在一定的约束条件下达到最小.但是用能量法光顺曲面,不论原来的曲面是什么形状,光顺后的曲面趋于向平面变化,导致曲面变形,而且计算速度受控制顶点个数的限制,不适合处理大量数据.小波分析法是将曲面分解为低分辨率曲面和细节曲面,分解次数越多,曲面越光顺.分解算法和重构算法速度快,适合大数据量曲面光顺.无论采用哪种方法,要达到所有截面曲线和控制曲线都光顺不是轻而易举的,要求设计员拥有相当的经验积累和理论基础,经过耐心细致艰巨的工作才能实现.曲面的光顺问题迄今没有得到圆满的解决,人们期待在这方面得到突破性的进展. 在反算控制点过程中,用的参数化方法不同,最后的结果也有差别,比较而言采用积累弦长参数化法最合适.均匀参数化方法比较适合于数据点多边形各边接近相等的场合.积累弦长参数化法如实反映了数据点按弦长的分布情况,一直被认为是最佳参数化法.它克服了数据点按弦长分布不均匀情况下采用均匀参数化所出现的问题.向心参数化方法考虑了数据点相邻弦线的折拐情况,当数据点有急剧拐弯时,这种方法效果很好.所以,在实际应用中要根据数据点的分布情况选择合适的参数化方法来反算控制点.本文给出了一种反算三次B样条插值曲线和双三次B样条插值曲面控制顶点的简便算法.其实践证明:该算法稳定可靠,速度较快,结果也能令人满意.当用户对边界条件无特殊要求时,适合采用本算法.【相关文献】[1]王飞.三次B样条反算的一种简便算法[J].北京邮电大学学报,1996,(3):84-90.[2]施法中.计算机辅助几何设计与非均匀有理B样条[M].北京:北京航空航天大学出版社,1994.[3]吕丹,等.三次NURBS曲线控制点的计算[J].弹箭与制导学报,2006,(4):357-359.[4]彭伟.逆向工程中的NURBS曲面重构研究[D].南京:南京理工大学,2003.[5]徐文鹏.基于人体特征的服装cad参数化技术研究与应用[D].杭州:浙江大学,2004.[6]王少纯,等.基于NURBS方法的三维型腔曲面的几何描述及网格域的生成[J].哈尔滨工业大学学报,2000,32(2).[7]杨晓静.B样条曲面构造方法的研究和实现[D].北京:北京工业大学,2003.。
B样条曲面的算法生成及研究本文由天空乐园大学生旅游网整理分享摘要本文主要介绍B样条曲面的性质、算法、以及应用,让我们对B样条曲面有一个全面的了解。
B样条曲面不仅在保留了Bézier曲面的优点的同时克服了由于整体表示带来的不具有局部性质的特点,而且成功地解决了样条函数的局部控制问题,轻而易举地在参数连续性上解决了贝奇尔方法的连接问题,是最广泛流行的形状数学描述的主流方法之一。
B样条曲面中均匀双三次B样条曲面又是各种B 样条曲面中应用最多的一种之一,它避免了B 样条递推定义的繁琐算法,只要给出的空间型值点大致均匀,即可生成空间任何形状的曲面。
而非均匀有理B样条曲面( NU RBS ) 是曲面构造的常用工具, 是目前工业界曲面曲线表示的数学标准。
B-样条曲面是一种特殊NU RBS , 在实际应用中是首选形式。
在本文中我们主要介绍了均匀双三次B样条曲面。
关键词:B样条曲面非均匀B样条曲面双三次均匀B样条曲面 B样条基函数1 引言计算机运用技术的不断发展使得CAD/CAM技术日益提高和完善,为实现工业生产过程自动化展示了光明的前景。
目前,利用程序系统对某一产品实现机辅设计和数控加工的自动化过程已经开始。
然而在实际生产中,数控机床的使用还很不普遍,大部分数控机床仍靠手工编程来实现单一加工。
这除了数控设备价格昂贵之外,控制程序系统的设计难度较大也是重要原因之一。
譬如,对数控铣削加工控制程序系统的设计,尤其是在数控铣床上加工任意形状曲面的程序系统设计,目前还处于探讨摸索之中。
随着汽车、船舶、航空工业的发展,对于工业产品的形状描述也就提出了越来越高的要求。
工业产品的形状大致可以分为两类:一类是仅有初等解析曲面,例如平面、圆柱面、圆锥面、球面以及它们组合而成的规则曲面;另一类是不能由任何解析表达的自由型曲面。
汽车、船舶、飞机的外部零件基本上都是自由曲面。
而自由曲面不能由画法几何与机械制图表达清楚,成为摆在工程师面前首要解决的问题。
圆锥曲线的三次nurbs表示及其几何构造方法题目要求了解圆锥曲线的三次Nurbs表示及其几何构造方法。
首先,我们需要了解Nurbs(非均匀有理B样条)是什么。
Nurbs是一种参数曲线和曲面的表示方法,广泛应用于计算机图形学、CAD/CAM等领域。
对于圆锥曲线,我们可以使用三次Nurbs来表示。
具体地,假设圆锥曲线可以由下面的参数方程表示:\(x(t) = a_0 + a_1 × t + a_2 × t^2 + a_3 × t^3\)\(y(t) = b_0 + b_1 × t + b_2 × t^2 + b_3 × t^3\)其中,\(t\) 是参数,\(a_i\) 和 \(b_i\) 是常数。
对于几何构造方法,我们可以使用以下步骤:1. 确定控制点:首先,我们需要选择一些控制点来定义圆锥曲线的形状。
这些控制点可以手动选择,也可以通过算法自动生成。
2. 计算权因子:对于每个控制点,我们需要为其分配一个权因子。
权因子的作用是控制曲线的形状和位置。
3. 计算基函数:根据权因子和Nurbs的阶数,我们可以计算出基函数。
基函数用于计算曲线上的点。
4. 计算曲线上的点:使用基函数和参数值,我们可以计算出曲线上的点。
这些点将构成圆锥曲线的形状。
5. 可视化结果:最后,我们可以将计算出的曲线上的点绘制出来,形成圆锥曲线的图像。
通过以上步骤,我们可以使用三次Nurbs来表示圆锥曲线,并使用几何构造方法来生成和控制其形状。
这种方法具有灵活性高、精度高等优点,因此在计算机图形学和CAD/CAM等领域得到了广泛应用。
三次B样条反算的一种简便算法
王飞
【期刊名称】《北京邮电大学学报》
【年(卷),期】1996(19)3
【摘要】提出一种反算三次B样条曲线、曲面控制顶点的简便算法.该算法适用于准均匀和非均匀B样条曲线、曲面的反算.算法采用非节点边界条件,不需要由用户提供。
【总页数】7页(P82-88)
【关键词】计算机几何;B样条曲缄;计算机辅助计算
【作者】王飞
【作者单位】北京邮电大学基础科学部
【正文语种】中文
【中图分类】TP301.6;TP391.75
【相关文献】
1.反求三次B样条曲线控制顶点的一种快速算法 [J], 吴光亚;王小华
2.用三次样条函数反算平曲线参数 [J], 王辉;石水玉
3.反算三次B样条曲线的等距曲线 [J], 杨红梅;张德强;关伟琪
4.开放均匀B样条曲线反算的一种通用算法 [J], 柴本成;李继芳;张怡芳
5.一种三次均匀B样条曲线快速反算的方法 [J], 李道军;邬向伟
因版权原因,仅展示原文概要,查看原文内容请购买。
%%%%%%%%%%三次非均匀B样条曲面的绘制
clc
clf
clear
A=input('请输入控制点:')%16个控制顶点要求以列向量表示点的坐标[2 3 4 5 2 3 4 5 2 3 4 5 2 3 4 5;2 2 2 2 3 3 3 3 4 4 4 4 5 5 5 5;1 2 3 1 3 4 6 2 7 5 6 2 9 1 3 4];
n=input('请输入所需绘制B样条曲线的次数:');
Vx=[A(1,1:4);A(1,5:8);A(1,9:12);A(1,13:16)];%将控制顶点的x坐标放到维数为4的方阵中
V y=[A(2,1:4);A(2,5:8);A(2,9:12);A(2,13:16)];%将控制顶点的y坐标放到维数为4的方阵中Vz=[A(3,1:4);A(3,5:8);A(3,9:12);A(3,13:16)];%将控制顶点的z坐标放到维数为4的方阵中plot3(A(1,:),A(2,:),A(3,:),'o');%输出控制顶点
hold on
syms u
syms w
P_uwx=[0];
P_uwy=[0];
P_uwz=[0];
for i=1:1:4;
for j=1:1:4
u0=0;u1=0;u2=0;u3=0;u4=1;u5=1;u6=1;u7=1;%给定4个控制顶点所取的节点矢量
B1=(u4-u3-u)^3/((u4-u3)*(u4-u2)*(u4-u1));
B2=((u3-u1+u)*(u4-u3-u)^2)/((u4-u3)*(u4-u2)*(u4-u1))+((u5-u3-u)*(u4-u3-u)*(u3-u2+u))/((u5-u 2)*(u4-u3)*(u4-u2))+((u5-u3-u)^2*u)/((u5-u3)*(u5-u2)*(u4-u2));
B3=((u4-u3-u)*(u3-u2+u)^2)/((u5-u2)*(u4-u3)*(u4-u2))+((u5-u3-u)*u*(u3-u2+u))/((u5-u3)*(u5-u2)*(u4-u3))+((u6-u3-u)*u^2)/((u6-u3)*(u5-u3)*(u4-u3));
B4=u^3/((u6-u3)*(u5-u3)*(u4-u3));
B=[B1;B2;B3;B4];%三次非均匀B样条基函数矩阵(自由曲线曲面造型技术139页)
w0=0;w1=0;w2=0;w3=0;w4=1;w5=1;w6=1;w7=1;%给定4个控制顶点所取的节点矢量
C1=(w4-w3-w)^3/((w4-w3)*(w4-w2)*(w4-w1));
C2=((w3-w1+w)*(w4-w3-w)^2)/((w4-w3)*(w4-w2)*(w4-w1))+((w5-w3-w)*(w4-w3-w)*(w3-w2 +w))/((w5-w2)*(w4-w3)*(w4-w2))+((w5-w3-w)^2*w)/((w5-w3)*(w5-w2)*(w4-w2));
C3=((w4-w3-w)*(w3-w2+w)^2)/((w5-w2)*(w4-w3)*(w4-w2))+((w5-w3-w)*w*(w3-w2+w))/((w 5-w3)*(w5-w2)*(w4-w3))+((w6-w3-w)*w^2)/((w6-w3)*(w5-w3)*(w4-w3));
C4=w^3/((w6-w3)*(w5-w3)*(w4-w3));
C=[C1;C2;C3;C4];%三次非均匀B样条基函数矩阵
Puwx=Vx(i,j)* B(i)*C(j);%控制顶点的x坐标与两个方向的基函数做乘积
Puwy=V y(i,j)* B(i)*C(j);
Puwz=Vz(i,j)* B(i)*C(j);
P_uwx=P_uwx+Puwx;%得到曲面的x坐表关于u,w的表达式(自由曲线曲面造型技术146页)
P_uwy=P_uwy+Puwy;%得到曲面的y坐表关于u,w的表达式
P_uwz=P_uwz+Puwz;%得到曲面的z坐表关于u,w的表达式
end
end
%%%%%%%%%%%%%%%%%%%%%%%%曲面的绘制
X1=zeros(11);Y1=zeros(11);Z1=zeros(11);%形成11维0矩阵
i=1;j=1;
for m=0:1/10:1;
for n=0:1/10:1;
X=subs(P_uwx,{u,w},{m,n});%P=subs(P,{u,w},{m,n})就是把P表达式中所有u,w都用具体的m,n值代替
Y=subs(P_uwy,{u,w},{m,n});
Z=subs(P_uwz,{u,w},{m,n});
X1(i,j)=X;%将X的值放入11维的方阵
Y1(i,j)=Y;
Z1(i,j)=Z;
j=j+1;
end
j=1;
i=i+1;
end
grid;
surf(X1,Y1,Z1);
hold on
输出结果:
图1.三次非均匀曲面图。