全二分最大匹配快速分词算法
- 格式:pdf
- 大小:167.73 KB
- 文档页数:4
匈⽛利算法解决⼆分图最⼤匹配预备知识 匈⽛利算法是由匈⽛利数学家Edmonds于1965年提出,因⽽得名。
匈⽛利算法是基于Hall定理中充分性证明的思想,它是⼆分图匹配最常见的算法,该算法的核⼼就是寻找增⼴路径,它是⼀种⽤增⼴路径求⼆分图最⼤匹配的算法。
⼆分图 ⼆分图⼜称作⼆部图,是图论中的⼀种特殊模型。
设G=(V,E)是⼀个⽆向图,如果顶点V可分割为两个互不相交的⼦集(A,B),并且图中的每条边(i,j)所关联的两个顶点 i 和 j 分别属于这两个不同的顶点集(i in A,j in B),则称图G为⼀个⼆分图。
匹配 在图论中,⼀个图是⼀个匹配(或称独⽴边集)是指这个图之中,任意两条边都没有公共的顶点。
这时每个顶点都⾄多连出⼀条边,⽽每⼀条边都将⼀对顶点相匹配。
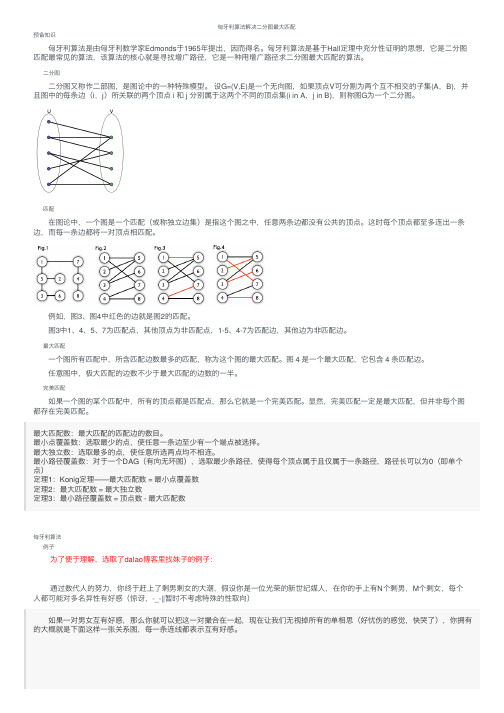
例如,图3、图4中红⾊的边就是图2的匹配。
图3中1、4、5、7为匹配点,其他顶点为⾮匹配点,1-5、4-7为匹配边,其他边为⾮匹配边。
最⼤匹配 ⼀个图所有匹配中,所含匹配边数最多的匹配,称为这个图的最⼤匹配。
图 4 是⼀个最⼤匹配,它包含 4 条匹配边。
任意图中,极⼤匹配的边数不少于最⼤匹配的边数的⼀半。
完美匹配 如果⼀个图的某个匹配中,所有的顶点都是匹配点,那么它就是⼀个完美匹配。
显然,完美匹配⼀定是最⼤匹配,但并⾮每个图都存在完美匹配。
最⼤匹配数:最⼤匹配的匹配边的数⽬。
最⼩点覆盖数:选取最少的点,使任意⼀条边⾄少有⼀个端点被选择。
最⼤独⽴数:选取最多的点,使任意所选两点均不相连。
最⼩路径覆盖数:对于⼀个DAG(有向⽆环图),选取最少条路径,使得每个顶点属于且仅属于⼀条路径,路径长可以为0(即单个点)定理1:Konig定理——最⼤匹配数 = 最⼩点覆盖数定理2:最⼤匹配数 = 最⼤独⽴数定理3:最⼩路径覆盖数 = 顶点数 - 最⼤匹配数匈⽛利算法例⼦ 为了便于理解,选取了dalao博客⾥找妹⼦的例⼦: 通过数代⼈的努⼒,你终于赶上了剩男剩⼥的⼤潮,假设你是⼀位光荣的新世纪媒⼈,在你的⼿上有N个剩男,M个剩⼥,每个⼈都可能对多名异性有好感(惊讶,-_-||暂时不考虑特殊的性取向) 如果⼀对男⼥互有好感,那么你就可以把这⼀对撮合在⼀起,现在让我们⽆视掉所有的单相思(好忧伤的感觉,快哭了),你拥有的⼤概就是下⾯这样⼀张关系图,每⼀条连线都表⽰互有好感。
二分图的最大匹配、完美匹配和匈牙利算法August 1, 2013 / 算法这篇文章讲无权二分图(unweighted bipartite graph)的最大匹配(maximum matching)和完美匹配(perfect matching),以及用于求解匹配的匈牙利算法(Hungarian Algorithm);不讲带权二分图的最佳匹配。
二分图:简单来说,如果图中点可以被分为两组,并且使得所有边都跨越组的边界,则这就是一个二分图。
准确地说:把一个图的顶点划分为两个不相交集U和V,使得每一条边都分别连接U、V中的顶点。
如果存在这样的划分,则此图为一个二分图。
二分图的一个等价定义是:不含有「含奇数条边的环」的图。
图 1 是一个二分图。
为了清晰,我们以后都把它画成图 2 的形式。
匹配:在图论中,一个「匹配」(matching)是一个边的集合,其中任意两条边都没有公共顶点。
例如,图3、图 4 中红色的边就是图 2 的匹配。
我们定义匹配点、匹配边、未匹配点、非匹配边,它们的含义非常显然。
例如图 3 中 1、4、5、7 为匹配点,其他顶点为未匹配点;1-5、4-7为匹配边,其他边为非匹配边。
最大匹配:一个图所有匹配中,所含匹配边数最多的匹配,称为这个图的最大匹配。
图 4 是一个最大匹配,它包含 4 条匹配边。
完美匹配:如果一个图的某个匹配中,所有的顶点都是匹配点,那么它就是一个完美匹配。
图 4 是一个完美匹配。
显然,完美匹配一定是最大匹配(完美匹配的任何一个点都已经匹配,添加一条新的匹配边一定会与已有的匹配边冲突)。
但并非每个图都存在完美匹配。
举例来说:如下图所示,如果在某一对男孩和女孩之间存在相连的边,就意味着他们彼此喜欢。
是否可能让所有男孩和女孩两两配对,使得每对儿都互相喜欢呢?图论中,这就是完美匹配问题。
如果换一个说法:最多有多少互相喜欢的男孩/女孩可以配对儿?这就是最大匹配问题。
基本概念讲完了。

最大权重匹配算法
最大权重匹配算法也叫做二分图匹配,它是解决二分图中最大匹配问题的一种常见算法。
二分图,顾名思义,就是可以分成两部分的图,即将所有节点分成两部分,使得同一
部分内的节点不连通。
下文中,我们以左侧节点为一部分,右侧节点为一部分。
最大权重匹配算法的目的是,在二分图中找到一种最大匹配方式,并且每条匹配边的
权重之和最大。
在实际问题中,这种算法经常用于任务分配、物流运输、职工配对等方
面。
算法过程:
1. 初始化所有匹配边的权重为0,同时记录每个节点是否被匹配过。
2. 从左侧部分的未匹配节点开始,遍历所有未匹配节点,将其标记为当前选中节
点。
3. 查找与当前选中节点有连通边的所有右侧节点,对于每个右侧节点,都计算出它
和当前选中节点形成的匹配边的权重。
如果该权重比之前已存在的匹配边权重要大,则更
新该匹配边权重,并将当前选中节点和右侧节点确定为一条新的匹配边。
如果需要更新匹
配边,则需要将之前的匹配边删除,统计删除边后,继续查找新的匹配边。
4. 如果当前选中节点不能形成新的匹配边,则回溯到上一个节点,并标记该节点为
已匹配。
5. 重复第2、3、4步操作,直到找出全部最大匹配边。
该算法的时间复杂度为O(n^3),属于多项式时间内可解决问题的范围,而且是一种较为高效的匹配算法。
但是需要注意的是,该算法必须满足是一个二分图才可以使用。
同时,算法并不能保证是一个最小顶标和、最优匹配的算法,但在大多数情况下,都可以得到较
好的匹配效果。

最大匹配算法
在解释最大匹配算法之前,我们先来了解一下什么是二分图和最大匹配。
二分图是指一个图的所有顶点可分为两个互斥的顶点集合,且任意一条边的两个端点都分属于不同的顶点集合。
二分图可以用一个二元组(V,E)表示,其中V表示顶点集合,E表示边集合。
最大匹配是指在一个二分图中找到一个边的子集,使得该子集中的边两两没有公共顶点,并且该子集中的边数量最大。
匈牙利算法是通过增广路径的方式求解最大匹配。
增广路径是指在一个二分图中,通过一系列的未匹配边和匹配边交替组成的路径,起点和终点分别属于不同的顶点集合。
下面是匈牙利算法的步骤:
1.初始化一个空的最大匹配。
2.对二分图中的每个未匹配顶点,找到一个增广路径。
如果找到了增广路径,就将其上的匹配边和未匹配边互换,并将路径上的所有未匹配边变为匹配边,所有匹配边变为未匹配边。
3.重复步骤2,直到无法找到增广路径为止。
在匈牙利算法中,为了找到增广路径,通常会使用深度优先或广度优先。
具体的实现方式可以根据实际情况选取。
匈牙利算法的时间复杂度为O(VE),其中V为顶点的数量,E为边的
数量。
由于每次找到增广路径后都会改变匹配边和未匹配边的状态,所以
算法的时间复杂度可能比较高。
但是在实际应用中,匈牙利算法在大多数情况下都能快速求解最大匹配问题。
总结起来,最大匹配算法(匈牙利算法)是一种用于求解二分图最大匹配的算法,通过不断寻找增广路径来实现。
它的时间复杂度为O(VE),并且在实际应用中具有广泛的应用价值。

⼆分图的最⼤匹配—匈⽛利算法【基本概念】:⼆分图:⼆分图⼆分图⼜称作⼆部图,是图论中的⼀种特殊模型。
设G=(V,E)是⼀个⽆向图,如果顶点V可分割为两个互不相交的⼦集(A,B),并且图中的每条边(i,j)所关联的两个顶点i和j分别属于这两个不同的顶点集(i in A,j in B),则称图G为⼀个⼆分图。
⽆向图G为⼆分图的充分必要条件是,G⾄少有两个顶点,且其所有回路的长度均为偶数。
最⼤匹配最⼤匹配:给定⼀个⼆分图G,在G的⼀个⼦图M中,M的边集中的任意两条边都不依附于同⼀个顶点,则称M是⼀个匹配. 选择这样的边数最⼤的⼦集称为图的最⼤匹配问题,如果⼀个匹配中,图中的每个顶点都和图中某条边相关联,则称此匹配为完全匹配,也称作完备匹配.最⼩覆盖:最⼩覆盖要求⽤最少的点(X集合或Y集合的都⾏)让每条边都⾄少和其中⼀个点关联。
可以证明:最少的点(即覆盖数)=最⼤匹配数最⼩路径覆盖:⽤尽量少的不相交简单路径覆盖有向⽆环图G的所有结点。
解决此类问题可以建⽴⼀个⼆分图模型。
把所有顶点i拆成两个:X结点集中的i 和Y结点集中的i',如果有边i->j,则在⼆分图中引⼊边i->j',设⼆分图最⼤匹配为m,则结果就是n-m。
增⼴路(增⼴轨):(增⼴轨):增⼴路若P是图G中⼀条连通两个未匹配顶点的路径,并且属于M的边和不属于M的边(即已匹配和待匹配的边)在P上交替出现,则称P为相对于M的⼀条增⼴路径(举例来说,有A、B集合,增⼴路由A中⼀个点通向B中⼀个点,再由B中这个点通向A中⼀个点……交替进⾏)。
增⼴路径的性质:1 有奇数条边。
2 起点在⼆分图的左半边,终点在右半边。
3 路径上的点⼀定是⼀个在左半边,⼀个在右半边,交替出现。
(其实⼆分图的性质就决定了这⼀点,因为⼆分图同⼀边的点之间没有边相连,不要忘记哦。
)4 整条路径上没有重复的点。
5 起点和终点都是⽬前还没有配对的点,⽽其它所有点都是已经配好对的。
[算法]⼆分图最⼤匹配前⾔具体什么是⼆分图,如何判定,可以参考。
定义简单来说,就是⼆分图中有满⾜任意两条边没有相同的点的边的集合,称为⼀组匹配,⽽边数最多的⼀组匹配称为该⼆分图的最⼤匹配。
在⼀组匹配中,属于这组边的称为匹配边,不属于的称为⾮匹配边,属于这组匹配的点称为匹配点,不属于的称为⾮匹配点。
匈⽛利算法⼜称增⼴路算法。
对于⼀组匹配 \(M\) ,若存在⼀条路径连接两个⾮匹配点,且使得匹配边与⾮匹配边交替出现,则称这条路径为增⼴路。
如上图,已匹配的边为红⾊,未匹配的边为绿⾊,则可以找到⼀组增⼴路 \(8\) ~ \(2\) ~ \(7\) ~ \(4\) 。
不难发现增⼴路具有以下特点:以⾮匹配边开始,在以⾮匹配边结尾,那么长度必为奇数。
路径上第⼀条边因为第⼀个点为奇数,则该路径上的第⼀个点为⾮匹配边,按照匹配边与⾮匹配边交替出现的性质可以得出,该路径的第奇数条边必为⾮匹配边,已经匹配的边必为第偶数条边,则有⾮匹配边的边数⽐匹配边的边数多⼀。
最⼤匹配中不会有增⼴路。
证明:假设最⼤匹配中存在增⼴路,则可以将增⼴路中的所有边的状态取反(即把⾮匹配边转换为匹配边,将匹配边转换为⾮匹配边),得到另⼀组匹配,⽽这组匹配的匹配边肯定会⽐之前的⼀组匹配的边数多⼀,则之前的这组匹配就不是最⼤匹配,与假设⽭盾,证毕。
在⼀张⼆分图中,若最⼤匹配为 \(S\) ,当且仅当 \(S\) 中不存在增⼴路。
其确性基于 \(hall\) 定理,⽐较复杂就不在详讲,主要讲找⼆分图最⼤匹配的⽅法。
⼤体思想就是枚举左部点,找到增⼴路后将这条路上的所有边的状态取反,得到边数更⼤的⼀组匹配。
在匹配过程中,有两种情况会改变当前左部点 \(u\) 的匹配情况。
1. 与之对应的右部点 \(v\) 是⾮匹配点,则可以将其的连边变为匹配边。
2. 与之对应的右部点 \(v\) 是匹配点,但与 \(v\) 已经匹配的点 \(u'\) 可以找到另⼀个未匹配的右部点 \(v'\) ,则 \(u\) ~ \(v\) ~ \(u'\) ~ \(v'\) 为⼀条增⼴路,则将其状态取反。
⼆分图最⼤匹配总结⼆分图匹配(匈⽛利算法)1。
⼀个⼆分图中的最⼤匹配数等于这个图中的最⼩点覆盖数König定理是⼀个⼆分图中很重要的定理,它的意思是,⼀个⼆分图中的最⼤匹配数等于这个图中的最⼩点覆盖数。
如果你还不知道什么是最⼩点覆盖,我也在这⾥说⼀下:假如选了⼀个点就相当于覆盖了以它为端点的所有边,你需要选择最少的点来覆盖所有的边。
2。
最⼩路径覆盖=最⼩路径覆盖=|G|-最⼤匹配数在⼀个N*N的有向图中,路径覆盖就是在图中找⼀些路经,使之覆盖了图中的所有顶点,且任何⼀个顶点有且只有⼀条路径与之关联;(如果把这些路径中的每条路径从它的起始点⾛到它的终点,那么恰好可以经过图中的每个顶点⼀次且仅⼀次);如果不考虑图中存在回路,那么每每条路径就是⼀个弱连通⼦集.由上⾯可以得出:1.⼀个单独的顶点是⼀条路径;2.如果存在⼀路径p1,p2,......pk,其中p1 为起点,pk为终点,那么在覆盖图中,顶点p1,p2,......pk不再与其它的顶点之间存在有向边.最⼩路径覆盖就是找出最⼩的路径条数,使之成为G的⼀个路径覆盖.路径覆盖与⼆分图匹配的关系:最⼩路径覆盖=|G|-最⼤匹配数;3。
⼆分图最⼤独⽴集=顶点数-⼆分图最⼤匹配独⽴集:图中任意两个顶点都不相连的顶点集合。
⼆分图模板:模板⼀:匈⽛利算法/* **************************************************************************//⼆分图匹配(匈⽛利算法的DFS实现)//初始化:g[][]两边顶点的划分情况//建⽴g[i][j]表⽰i->j的有向边就可以了,是左边向右边的匹配//g没有边相连则初始化为0//uN是匹配左边的顶点数,vN是匹配右边的顶点数//调⽤:res=hungary();输出最⼤匹配数//优点:适⽤于稠密图,DFS找增⼴路,实现简洁易于理解//时间复杂度:O(VE)//***************************************************************************///顶点编号从0开始的const int MAXN=510;int uN,vN;//u,v数⽬int g[MAXN][MAXN];int linker[MAXN];bool used[MAXN];bool dfs(int u)//从左边开始找增⼴路径{int v;for(v=0;v<vN;v++)//这个顶点编号从0开始,若要从1开始需要修改if(g[u][v]&&!used[v]){used[v]=true;if(linker[v]==-1||dfs(linker[v])){//找增⼴路,反向linker[v]=u;return true;}}return false;//这个不要忘了,经常忘记这句}int hungary(){int res=0;int u;memset(linker,-1,sizeof(linker));for(u=0;u<uN;u++){memset(used,0,sizeof(used));if(dfs(u)) res++;}return res;}//******************************************************************************/模板⼆: Hopcroft-Carp算法这个算法⽐匈⽛利算法的时间复杂度要⼩,⼤数据可以采⽤这个算法/* *********************************************⼆分图匹配(Hopcroft-Carp的算法)。