DCS常用分子块说明
- 格式:docx
- 大小:31.42 KB
- 文档页数:15

DCS操作说明资料DCS(Distributed Control System,分布式控制系统)是一种广泛应用于工业控制领域的自动化控制系统。
它能够集中控制多个分散的控制单元,通过数据通信实现对工业过程的监控与操作。
下面是一份DCS操作说明的资料,详细介绍了DCS系统的配置、操作和故障处理等方面的内容。
一、DCS系统配置1.硬件配置1.1主控制器:负责控制整个DCS系统的主要模块,包括CPU、存储器和输入输出接口等。
1.2输入输出模块:用于接收和发送实时过程数据。
1.3通信网络:建立控制系统内部不同模块之间的通信连接。
1.4控制台:供操作人员进行监控和操作的界面。
2.软件配置2.1SCADA软件:用于数据采集与处理,实现对工业过程的监控和控制。
2.2PLC程序:编写用于控制工业过程的程序,与SCADA软件进行通信。
二、DCS系统操作1.登录系统输入用户名和密码,进入DCS系统。
2.监控界面2.1实时数据显示:显示工业过程的各种参数,如温度、压力等。
2.2图形界面:通过图形化方式展示工业过程的设备、管道等情况,便于操作人员理解。
3.控制操作3.1自动操作:按照预设的控制策略进行控制。
3.2手动操作:手动开关控制设备,进行临时控制。
3.3调整参数:根据工艺要求调整设备参数,如温度、压力设定值等。
4.报警管理4.1报警显示:当系统出现异常情况时,显示相应的报警信息。
4.2报警处理:针对不同的报警情况,进行相应的处理措施。
5.数据记录与分析5.1数据记录:对工业过程中的关键参数进行实时记录,生成数据记录。
5.2数据分析:对工艺过程中的数据进行分析,寻找潜在问题和改进机会。
三、DCS系统故障处理1.报警解除1.1确认报警情况:判断是真实报警还是误报警。
1.2解除报警:根据具体情况采取相应的解除措施。
2.故障排查2.1跟踪报警日志:查找故障发生的时间和原因。
2.2检查设备及传感器:确认设备和传感器是否正常工作。

DCS系统结构及各部分功能简介一、仪表与控制系统概述1、控制过程的性质控制过程的性质可被分成两大类,一类是连续调节性质的(一般称之为过程控制,或流程控制),另一类是状态控制性质的(一般称之为程序控制,或逻辑控制)。
调节是控制的一种。
调节特指通过反馈的方法对连续变化的对象进行连续的控制,如通过调节燃气阀门的大小以控制燃烧火焰的大小,从而达到控制加热器温度,使其保持在预定温度范围内的目的。
在这里温度是一个连续变化的量,对温度的调节也是连续进行的。
调节的过程并没有明显的起点和终点,而只有对目标值的允许偏差以及进行测量和控制的周期。
刚才所说的允许偏差和测量控制周期是连续过程调节的两个最基本的要素,除了这两大要素外,连续过程调节最重要的要素是调节算法,如经典的PID调节、现代的模糊控制等。
所有这些要素都极大地影响着调节的效果和质量。
控制所包含的范围更广,除了上述对连续变化的对象进行调节外,还包括了对非连续对象、非连续过程的控制等。
非连续控制一般指某种装置的状态或位置,对其进行控制实际上就是按照一定的方式改变其状态或位置,如某个电力开关的合闸或分闸。
而非连续过程则由一组非连续对象按照工序的要求组合在一起,以完成一个比较复杂的动作或任务,这样的过程有很明显的起点和终点,控制过程和动作过程是完全对应的。
对非连续过程的控制是一种顺序控制或程序控制,是根据各个被控对象的动作时间、动作顺序和逻辑关系进行的控制。
刚才所说的动作时间、动作顺序和逻辑关系是对非连续过程实行控制的要素。
在实际的生产过程中,更多遇到的,是连续控制(或调节)和非连续控制的混合型控制,即对各种不同工况的过程控制。
因为生产的复杂性,同样的生产装置也会有不同的生产工况或生产阶段,生产工况的切换是根据操作人员的指令或根据某种状态进行的,而平稳工况的控制则是一种连续控制。
在一些生产过程中,除广泛使用反馈控制方法外,还经常使用前馈控制方法。
前馈控制根据生产设备的运行参数计算控制量,并依据控制量对现场实施控制。

contents •DCS概述•硬件设备及配置•软件功能介绍与操作指南•系统集成与调试技巧分享•先进控制策略在DCS中应用探讨•总结回顾与展望未来发展趋势目录01 DCS概述DCS定义第一代第二代第三代01020304DCS定义与发展历程DCS应用领域及市场需求应用领域市场需求过程控制级控制管理级包括操作员站、工程师站等,提供人机界面和系统管理功能。
实时数据采集与处理控制策略实施人机交互与监控系统管理与维护02硬件设备及配置控制器类型与特点DCS控制器的类型主要包括可编程逻辑控制器(PLC)、微处理器基础控制器、专用控制器等。
控制器特点高可靠性、实时性、可扩展性、易于维护等。
控制器性能指标处理速度、内存容量、I/O点数、通讯接口等。
输入模块功能输出模块功能配置方法030201输入输出模块功能及配置方法通讯网络架构及协议解析通讯协议类型通讯网络架构常见的有ModbusEthernet/IP协议解析03软件功能介绍与操作指南监控界面设计与实现方法界面布局设计图形化展示交互设计数据处理对采集的数据进行清洗、转换、计算等处理,以满足监控需求。
数据采集通过多种方式获取监控数据,如传感器、数据库等。
数据存储采用高效、可靠的存储策略,确保监控数据的安全性和可用性。
数据采集、处理及存储策略报警管理功能设置与优化建议报警规则设置报警通知与处理报警优化建议04系统集成与调试技巧分享设备检查与准备设备连接设备配置设备测试硬件设备连接与配置步骤详解软件安装、配置及调试过程指导获取所需的DCS系统软件和相关补丁,确保软件版本与硬件兼容。
按照软件安装指南,正确安装DCS系统软件和相关组件。
根据实际需求,对DCS系统进行参数设置和配置,如控制策略、报警参数等。
在完成安装和配置后,对DCS系统进行调试,确保系统能够正常运行。
软件准备软件安装软件配置软件调试通过系统日志、报警信息等方式,识别出故障现象和可能的原因。
故障识别故障定位故障排除经验总结利用专业工具和经验,对故障进行定位,确定故障发生的具体位置。

附录目录附录一XDPS预定义标准功能块说明一概述⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1-1 二DPU简介⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1-1 三DPU组态过程⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1-2 四页⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1-2 五功能块⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1-21 XDPS实时网和硬件I/O功能块1.1 模拟量下网功能块 XNETAI ID=100⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1-51.2 开关量下网功能块 XNETDI ID=101⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1-51.3 模拟量上网功能块 XNETAO ID=102⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1-51.4 开关量上网功能块 XNETDO ID=103⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1-61.5 模拟量输入功能块 XAI ID=104⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1-71.6 开关量输入功能块 XDI ID=105⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1-81.7 模拟量输出功能块 XAO ID=106⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1-81.8 开关量输出功能块 XDO ID=107⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1-91.9 脉冲量输入功能块 XPI ID=108⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1-91.10 页间模拟量输入功能块 PgAI ID=110⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1-91.11 页间开关量输入功能块 PgDI ID=111⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1-101.12 页间模拟量输出功能块 PgAO ID=112⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1-101.13 页间开关量输处功能块 PgDO ID=113⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1-102 模拟函数2.1 2输入加法器 ADD ID=1⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1-112.2 乘法器 MUL ID=2⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1-112.3 除法器 DIV ID=3⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1-112.4 开方器 SQRT ID=4⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1-122.5 取绝对值 ABS ID=5⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1-122.6 五次多项式 POLYNOM ID=6⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1-122.7 8输入数学统计器 SUM8 ID=7⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1-132.8 12段函数变换F(X) ID=8⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1-132.9 保留ID=9⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1-142.10 指数/对数函数POW/LOG ID=10⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1-142.11 三角和反三角函数 TRIANGLE ID=11⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1-142.12、热力性质计算 PTCAl ID=12⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1-153 时间过程函数3.1 超前滞后模块 LEADLAG ID=20⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1-163.2 滞后模块 DELAY ID=21⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1-163.3 微分模块 DIFF ID=22⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1-173.4 时域统计模块 TSUM ID=23⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1-173.5 数字滤波 FILTER ID=24⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1-183.6 斜坡信号发生器ID=25⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1-183.7 段信号发生器f(t) ID=26⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1-183.8 伪随机信号发生器 Undefined ID=27⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1-193.9 时域开关量统计模块 TSUMD ID=28⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1-194 控制用算法4.1 二选一选择器 TWOSEL ID=30⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1-204.2 三选一选择器 THREESEL ID=31⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1-204.3 无扰切换模块 SFT ID=32⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1-214.4 高低限幅器 HLLMT ID=33⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1-214.5 高低限报警 HLALM ID=34⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1-214.6 速率限制器 RATLMT ID=35⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1-224.7 速率报警器 RATALM ID=36⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1-224.8 偏差运算 DEV ID=37⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1-234.9 PID运算 EPID ID=38⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1-244.10 简单PID模块 Undefined ID=39⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1-244.11 2输出平衡模块 Balance2 ID=40⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1-254.12 八输入平衡模块 BALANCE8 ID=41⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1-264.13 数字驱动伺服模块 DDS ID=42⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1-264.14 查表式模糊控制器 FTAB ID=43⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1-274.15 慢信号保护模块 SAIPro ID=44⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1-285 逻辑电路5.1 2输入与 AND ID=50⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1-295.2 2输入或 OR ID=51⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1-295.3 反相器 NOT ID=52⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1-295.4 异或器 XOR ID=53⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1-305.5 8输入数量或 QOR8 ID=54⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1-305.6 RS触发器ID=55⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1-305.7 定时器 TIMER ID=56⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1-315.8 计数器 CNT ID=57⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1-325.9 模拟比较器 CMP ID=58⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1-335.10 循环定时器 CYCTIMER ID=59⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1-335.11 步序控制器 STEP ID=60⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1-345.12 软件脉冲列输出 SPO ID=61⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1-356 操作器6.1 模拟软手操器 S/MA ID=70⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1-366.2 键盘模拟量增减 KBML ID=71⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1-376.3 数字手操器 DEVICE ID=72⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1-376.4 简单数字手操器 D/MA ID=73⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1-416.5 带开关输出的模拟软手操器ADS/MA ID=74⋯⋯⋯⋯⋯⋯⋯⋯1-416.6 电气数字手操器 EDEVICE ID=75⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1-427 特殊功能块7.1 品质(状态)测试模块ID=80⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1-447.2 触发执行事件 EVENT ID=81⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1-447.3 16个布尔变量转换为长整形变量 B16TOL ID=82⋯⋯⋯⋯⋯⋯⋯⋯1-457.4 长整形变量转换为16位布尔个变量 LTOB16 ID=83⋯⋯⋯⋯⋯⋯⋯⋯1-457.5 长整型模拟变量含义转换器 LTOF ID=84⋯⋯⋯⋯⋯⋯⋯⋯1-457.6 节点(状态)测试模块 TDPU ID=85⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1-467.7 上网报警闭锁功能块 DisAlm ID=86⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1-467.8 上网报警限修改功能块 ChgAlm ID=87⋯⋯⋯⋯⋯⋯⋯⋯1-467.9 I/O卡件测试模块 TCard ID=88⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1-477.10 I/O站测试模块 TNode ID=89⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1-47附录二XDPS全局实时点记录数据结构说明1 概述⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯2-12 模拟点记录格式⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯2-13 开关点记录格式⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯2-1附录三XDPS常用程序命令行参数说明1 概述⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯3-12 语法规则⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯3-23 Xlist,AlmLst,AlmHis命令行设置列表⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯3-34 Trend命令行设置列表⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯3-45 命令中时间参数说明列表⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯3-56 参数说明文章⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯3-67 举例⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯3-7附录四XDPS触摸式键盘键码表⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯附图一张。

DCS 系统包括控制节点、操作节点、通信网络。
控制节点包括控制站,通信接口。
操作节点包括工程师站,操作员站,服务器站,数据管理站。
通信网络包括管理信息网,过程信息网,过程控制网,I/O 总线。
控制站硬件包括机柜,机笼,供电,卡件。
机柜包括机笼、交换机、电源模块、端子板、卡件。
机笼分为电源机笼和卡件机笼;卡件包括主控卡、数据转发卡、I/O 卡件及端子板。
现场接线箱里面包括接线端子和接线端子排。
DCS 的硬件体系结构考察DCS 的层次结构,DCS 级和控制管理级是组成DCS的两个最基本的环节。
过程控制级具体实现了信号的输入、变换、运算和输出等分散控制功能。
在不同的DCS 中,过程控制级的控制装置各不相同,如过程控制单元、现场控制站、过程接口单元等等,但它们的结构形式大致相同,可以统称为现场控制单元FCU 。
过程管理级由工程师站、操作员站、管理计算机等组成,完成对过程控制级的集中监视和管理,通常称为操作站。
DCS 的硬件和软件,都是按模块化结构设计的,所以DCS的开发实际上就是将系统提供的各种基本模块按实际的需要组合成为一个系统,这个过程称为系统的组态。
(1)现场控制单元现场控制单元一般远离控制中心,安装在靠近现场的地方,其高度模块化结构可以根据过程监测和控制的需要配置成由几个监控点到数百个监控点的规模不等的过程控制单元。
现场控制单元的结构是由许多功能分散的插板(或称卡件)按照一定的逻辑或物理顺序安装在插板箱中,各现场控制单元及其与控制管理级之间采用总线连接,以实现信息交互。
现场控制单元的硬件配置需要完成以下内容:插件的配置根据系统的要求和控制规模配置主机插件(CPU插件)、电源插件、I/O插件、通信插件等硬件设备;硬件冗余配置对关键设备进行冗余配置是提高DCS可靠性的一个重要手段,DCS通常可以对主机插件、电源插件、通信插件和网络、关键I/O插件都可以实现冗余配置。
硬件安装不同的DCS,对于各种插件在插件箱中的安装,会在逻辑顺序或物理顺序上有相应的规定。
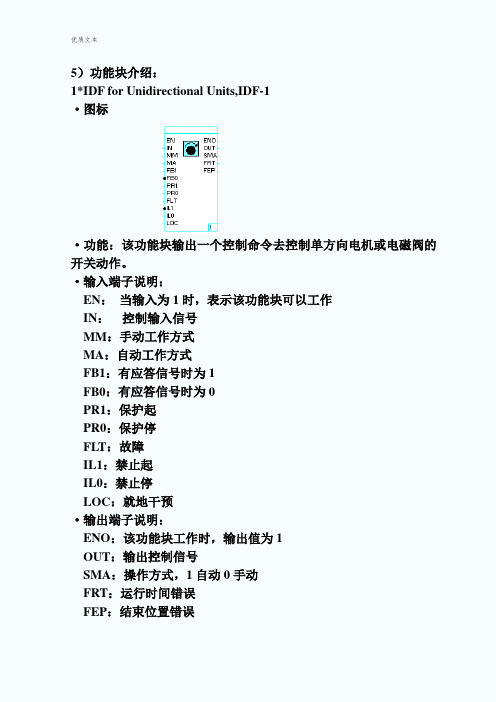
5)功能块介绍:1*IDF for Unidirectional Units,IDF-1·图标·功能:该功能块输出一个控制命令去控制单方向电机或电磁阀的开关动作。
·输入端子说明:EN:当输入为1时,表示该功能块可以工作IN:控制输入信号MM:手动工作方式MA:自动工作方式FB1:有应答信号时为1FB0:有应答信号时为0PR1:保护起PR0:保护停FLT:故障IL1:禁止起IL0:禁止停LOC:就地干预·输出端子说明:ENO:该功能块工作时,输出值为1OUT:输出控制信号SMA:操作方式,1自动0手动FRT:运行时间错误FEP:结束位置错误·面板显示Status texts:文本状态说明Status texts1: 文本状态1Status texts0: 文本状态0Run time monitoring:运行时间监视Max run time: 写入运行时间Monitoring on: 监视运行时间Reaction after trouble:接收故障信号时反映Manual and OFF: 接收故障信号时输出为0 Previous values: 接收故障信号时保持原值Feedback:反馈Feedback variable available:接受应答Monitoring end position on:监视应答2* 模拟量输入转换(3个)·图标①数据类型转换·功能:INT量转换成REAL量②量程转换(SCAL)(模拟量)·功能:将模拟量输入信号的量程格式转换成另一量程格式的模拟量输出信号。
·输入端子说明:EN:当输入为1时,表示该功能块可以工作IN:接受REAL量信号·输出端子说明:ENO:该功能块工作时,输出值为1OUT:输出REAL量信号STA:错误代码ERR:错误为1·面板显示·图标·功能:对输入的模拟量信号进行监控。
DCS集散过程控制系统1.简介2.特点3.用途与前景1.DCS简介DCS控制系统(Distributed Control System,分散控制系统)是随着现代大型工业生产自动化的不断兴起和过程控制要求的日益复杂应运而生的综合控制系统。
它是计算机技术、系统控制技术、网络通讯技术和多媒体技术相结合的产物,可提供窗口友好的人机界面和强大的通讯功能,是完成过程控制、过程管理的现代化设备,具有广阔的应用前景。
针对不同行业、不同项目,在充分调查了计算机技术、网络技术、应用软件技术、信号处理技术的基础上,使用各种分散控制系统(DCS),高质量、高标准的完成工程设计、组态、成套供货、现场启动调试、性能测试及考核验收,推出切实可行的技术方案。
其基本思想是分散控制、集中操作、分级管理、配置灵活以及组态方便。
DCS 分硬件和软件,硬件包括DCS模块机柜、电脑、交换机、二次仪表、仪表检测装置(温度、流量、压力、分析、液位、调节阀、执行机构)等、电器控制系统、PLC、等硬件设备。
软件包括DCS组态软件还有CAD制图、编程软件等常用软件。
DCS是过程控制的电脑,它的编程跟触摸屏差不多了,但侧重算法。
(1)分散控制系统DCS是集4C(Communication,Computer,Control、CRT)技术于一身的监控技术。
(2)从上到下的树状拓扑大系统,其中通信(Communication)是关键。
(3)PID在中断站中,中断站联接计算机与现场仪器仪表与控制装置。
(4)是树状拓扑和并行连续的链路结构,也有大量电缆从中继站并行到现场仪器仪表。
(5)模拟信号,A/D—D/A、带微处理器的混合。
(6)一台仪表一对线接到I/O,由控制站挂到局域网LAN。
(7)DCS是控制(工程师站)、操作(操作员站)、现场仪表(现场测控站)的3级结构。
(9)用于大规模的连续过程控制,有庞大的信息处理能力。
(10)为保证通信的完整,大部分DCS厂家都能提供冗余数据公路。
DCS中的一些基础概念单回路的构成⏹Human Interface(人机界面)⏹Communications Driver (通信器)⏹Control Data Processor (控制数据处理器)⏹Input/Output(I/O)Interface(输入输出界面)各个组成部分描述如下:用于监控生产过程。
通常提供不同的操作级别并可更改过程相关的参数,如:●Process Variable (PV)(过程变量)●Set Point (SV)(设定值)●Output(OP)(输出值)●Tuning Constants(整定常数)●Alarm Conditions(报警条件)用于在人机界面和过程控制数据或功能块之间进行信转换功能。
控制数据处理器为控制器定义了操作特性,通常作为控制器的配置数据库保存在存储器中。
它用于设置或选择Proportional(比例度)、Integral(积分时间)、Drivative(微分时间)、Control Equation(控制等式)(PID)等参数,并具有自诊断测试功能。
输入输出界面连接现场所有的模拟和数字I/O至控制数据处理器。
它提供处理器或现场设备I/O所有信号的转换。
PlantScape 结构体系-分割功能PlanScape的特性是面向对象的系统环境,即它是建立在Object Linking and Embedding(OLE)(对象链接和嵌入)技术上,将多子系统提升为分割功能。
Control Builder 为PlantScape功能的中心。
它提供了对象库,可以图形化仿Human InterfaceCommunicationsDriverControl DataProcessorI/O Interface真一般控制操作。
PlantScape 包括几个库提供组态时间(Build-time )和实时(Real-time )数据的交换和存储。
数据流(Data Flow )是基于客户机/服务器关系(Client/Server )的,客户机输入(Pull )数据或服务器输出(Push )数据。
DCS控制系统第一章自控仪表工基础识图在讲DCS系统系统之前,先和大家一起回顾一下仪表工的基础识图,对今后大家日后的学习,仪表、控制系统检修维护都会有一定的意义。
1.1 仪表功能标志1.1.1 仪表功能标志组成仪表的功能标志由一个首位字母及一个或多个后继字母组成。
示例如下:例1 PI——功能标志P——首位字母(表示被测变量)I——后继字母(表示功能)例2 TIC——功能标志T——首位字母(表示被测变量)IC——后继字母(表示功能)表示连锁功能)1.1.2仪表功能字母代号仪表功能标志的字母代号见表1.1表1.1 常用仪表功能字母代号1.2 仪表检测流程图常见图形符号 1.2.1 常用仪表流程图符号及其含义a) 常规仪表b) 引入计算机或DCS 控制系统仪表1.3 仪表检测流程图识图MFRISA 30101MMPRISA 30102TSA 30103PIS 30104PIS 30105HL图1.1 工艺检测控制流程图1.4 仪表接线图识图(略)第二章 计算机控制系统及DCS 基础知识集散控制系统(Distributed Control System, DCS)是计算机控制系统的一种结构形式。
计算机控制是以自动控制理论和计算机技术为基础的,自动控制理论是计算机控制的理论支柱,计算机技术的发展又促进了自动控制理论的发展与应用。
计算机控制系统有多种结构形式,DCS就是其中的一种。
2.1 计算机控制系统基础知识2.1.1 计算机控制系统的一般概念计算机控制是关于计算机技术如何应用于工业生产过程自动化的一门综合性学问。
计算机控制的应用领域是非常广泛的,从计算机应用的角度出发,工业自动化是其重要的一个领域;而从自动化的领域来看,计算机控制系统又是其主要的实现手段。
可以说,计算机控制系统与用于科学计算及数据处理的一般计算机是两类不同用途、不同结构组成的计算机系统。
计算机控制系统是融计算机技术与工业过程控制于一体的综合性技术,它是在常规仪表控制系统的基础上发展起来的。
MaxDNA 分子块使用说明南京国电南自美卓控制系统有限公司自动时可输出2个变送器信号的平均值、低值或高值,手动时可选任一变送器信号。
当有一个变送器坏时,输出就选质量码好的变送器的数值。
当变送器全坏时,输出保持上一次有效值,此时质量码为坏。
EnHHLL:高高低低报警有效,0=None,1=LL,2=HH,3=Both,4=DeltaEnHiLo:高低报警有效,0=None,1=Lo,2=Hi,3=BothEnRange:越限报警有效,0=None,1=Lo,2=Hi,3=BothIn1Ctl:变送器1信号输入In2Ctl:变送器2信号输入LimDelta:偏差报警值设置LimDeltaHi:偏差高报值设置LimDeltaLo:偏差低报值设置LimHi:高报值设置LimHiHi:高高报值设置LimLo:低报值设置LimLoLo:低低报值设置LimRangeHi:量程上限值LimRangeLo:量程下限值ManSelect:手动选择变送器信号SelAuto:设置自动选择,输出值根据SelStrat定义的方式SelStrat:自动选择方式,0=平均,1=小选,2=大选In1Qual:变送器1质量码In1Value:变送器1数值In2Qual:变送器2质量码In2Value:变送器2数值InQualCode:变送器质量码,0=2变送器都好,1=变送器1坏,2=变送器2坏,3=变送器全坏自动时可输出3个变送器信号的平均值、低值、高值或中间值,手动时可选任一变送器信号。
当有一个变送器坏时,输出为另2个变送器的平均值、低值或高值。
当变送器全坏时,输出保持上一次有效值,此时质量码为坏。
EnHHLL:高高低低报警有效,0=None,1=LL,2=HH,3=Both,4=DeltaEnHiLo:高低报警有效,0=None,1=Lo,2=Hi,3=BothEnRange:越限报警有效,0=None,1=Lo,2=Hi,3=BothIn1Ctl:变送器1信号输入In2Ctl:变送器2信号输入In3Ctl:变送器3信号输入LimDelta:偏差报警值设置LimDeltaHi:偏差高报值设置LimDeltaLo:偏差低报值设置LimHi:高报值设置LimHiHi:高高报值设置LimLo:低报值设置LimLoLo:低低报值设置LimRangeHi:量程上限值LimRangeLo:量程下限值ManSelect:手动选择变送器信号SelAuto:设置自动选择,输出值根据SelStrat定义的方式SelStrat:自动选择方式,0=平均,1=小选,2=大选,3=取中(偶数取小),4=取中(偶数取大)SelStratBK:当一变送器坏时,另2个变送器自动选择方式,0=平均,1=小选,2=大选In1Qual:变送器1质量码In1Value:变送器1数值In2Qual:变送器2质量码In2Value:变送器2数值In3Qual:变送器3质量码In3Value:变送器3数值InQualCode:变送器质量码,0=3变送器都好,1=变送器1坏,2=变送器2坏, 3=变送器1和2坏,4=变送器3坏,5=变送器1和3坏,6=变送器2和3坏,7=变送器全坏三、PID调节块(PIDBASIC )PIDBASIC除了有基本的PID调节功能,还增加了前馈信号,设定值和输出有速率限制,偏差有死区设置,执行机构的位置反馈及预置功能。
ACsel 0=本地设定值,1=远方设定值DecRateLmt 输出下降速率限制SPRtDecLmt 设定值下降速率限制IncRateLmt 输出上升速率限制SPRtIncLmt 设定值上升速率限制DevHHLmt 测量值与设定值偏差高高限DevLLLmt 测量值与设定值偏差低低限DevHiLmt 测量值与设定值偏差高限DevLoLmt 测量值与设定值偏差低限DUFdbkIn 执行机构的位置反馈DV_Lmt 执行机构指令与反馈的偏差,当执行机构的指令与位置反馈的偏差大于DV_Lmt时,且FdbkPmt为1,DV_AlmHL报警参数置1,同时Dev_Alarm参数也置1,当偏差消失时,DV_AlmHL报警参数为0,Dev_Alarm参数仍为1,此时需用OpReset来复位。
DevMax 当执行结构>=95时,此参数为1DevMin 当执行结构<=5时,此参数为1Dv_AlmHL 执行机构的偏差报警FdbkPmt 执行结构的位置反馈有效FFAction 前馈的作用方向,0:正作用,1:反作用FFIn 前馈输入FFPropGain 前馈比例增益FFRateTime 前馈微分时间FRCBKIn 输出跟踪值GoPreset 为1时输出能强制到预设值GPValue 预设值SetAuto 为1时强制自动HiRng 输出量程范围,20mA对应的值LoRng 输出量程范围,4mA对应的值MaxOutRng 输出上限MinOutRng 输出下限PVCtl 测量值输入PVValue 测量值显示RspValue 远方设定值输入WspValue 设定值显示Out 调节器输出LSPTrack 1为PV跟踪PVTrack 1为PV跟踪Mode 手自动状态,0=手动,1=自动PIDActType PID调节方向,0=正作用,1=反作用PIDGap PV死区,偏差大于死区再调节PropGain 比例增益Reset 积分时间,数值越大积分作用越大RateGain 微分增益RateTime 微分时间OpMode 手自动切换命令OpLSPTarget 设定设定值OpLSPTargetIncr增量改变设定值OpTarget 设定输出值OpTargetIncr 增量改变输出值LGST 连逻辑块(LSDP)的LGST参数FdbkClose 调节阀全关信号FdbkOpen 调节阀全开信号MccAlm 调节阀故障信号四、PID逻辑块(LSDP)SlotST:连接PIDBASIC的SlotST参数SlotST的含义DO_1:设备故障报警,当执行机构的指令和反馈大于一定偏差时为1,可用OpReset复位DO_2:变送器故障DO_3:自动时增释放,即为1时可自动增DO_4:自动时减释放,即为1时可自动减DO_5:DO_6:迫升,当IncOvrd为1时此值为1DO_7:迫减,当DecOvrd为1时此值为1DO_8:取消分配,当CancelPart为1时此值为1DO_9:自动时自动释放,即为1时可自动调节DO_10:DO_11:自动丢失,虽在自动状态,但处于跟踪状态,例如跟踪ForceBKIn,GoPreset等DO_12:DO_13:设备位于高限(>95%)DO_14:设备位于低限(<5%)DO_15:DO_16:自动状态DecBlock:闭锁减IncBlock:闭锁增DecOvrd:迫减IncOvrd:迫升SetMan:强制切手动TrnsmtrFail:变送器故障五、支持多执行器的PID调节块(PID_PARTMSTR)PID_PARTMSTR是一个可以支持多个执行器的的基本PID模块,与PARTMEM原子块和AOCOM分子块一起使用,能达到多控制输出系统功能。
MstrDmd:多执行器输出,此输出连接在PARTMEM原子的MstrDmd输入端此功能块的其余参数均可参见PIDBASIC功能块的说明。
六、输出模块(AOCOM)AOCOM功能块自动时输出为逻辑运算的值,手动时为一手操器,运行可改变输出,此功能块适应4~20mA 输出,具有偏置、速率限制及预置功能。
BiasAuto 自动偏置功能有效DecRateLmt 输出下降速率限制IncRateLmt 输出上升速率限制DUFdbkIn 执行机构的位置反馈FdbkPmt 执行结构的位置反馈有效DV_Lmt 执行机构指令与反馈的偏差EqlErr 计算得出的偏差值FRCBKIn 输出跟踪值GoPreset 为1时输出能强制到预设值GPValue 预设值HiRng 输出量程范围,20mA对应的值LoRng 输出量程范围,4mA对应的值MaxOutRng 输出上限MinOutRng 输出下限InCtl 功能块的输入值LGST 连逻辑块(LSDP)的LGST参数七、带逻辑的选择块(SELCOM)此功能块就是一个2选1块,通过Sel进行选择,另外还增加了闭锁、超弛、跟踪及预置功能。
DecBlock:闭锁减DecOvrd:迫减,即输出直接置0IncBlock:闭锁增IncOvrd:迫增,即输出直接置100Frcbkin:跟踪值,当它下游的模块为手动时,输出即为Frcbkin的值GoPrset:此参数和MVprset一起使用,当GoPrset为1时,输出即MVprset预设的值MVPreset:此参数和GoPrset一起使用HiRng:输出上限LoRng:输出下限InCtrl1:第一路输入InCtrl2:第二路输入Sel: 0=选择第一路,1=选择第二路SetAuto:强制自动SetMan:强制手动TransmtrFail:变送器故障八、设备驱动块(BCA)BCA块是一个通用的设备级的驱动分子块,它可以适用各种阀、电机、断路器等设备。
其各引脚功能如下:AutoClose: 自动状态时的关命令AutoOpen: 自动状态时的开命令AutoStop: 自动状态时的停命令CmdCloseOut: 关指令输出CmdOpenOut: 开指令输出CmdState: 命令状态 1:开命令,2:关命令,3:停命令,4:复位CmdStopOut: 停指令输出CTCmdFail: 关失败CTFdbkLost: 关反馈失去CurrentAlm: 当前的报警Defeat: 不等于0时取消所有的报警送报警窗及历史库Desc: 设备描述DevAlm: 设备报警状态 0:无报警 1:有报警DevRMT: 远方/就地DevState: 设备状态码 0:初始,1:开,2:关,3:停,4复位,5:开过程,6:关过程,7:联启,8开失败,9关失败)10:Trip11:故障12禁操,13:就地FailCode: 设备故障码 0:正常,1:开反馈失去,2:关反馈失去,3:停反馈失去, 4:设备不可操,5:开失败,6:关失败,7:停失败,11:开关反馈同时到达.FdbkAppl: 反馈应用:0:反馈全用;1:仅用FdbkClose和FdbkStop;2:仅用FdbkOpen和FdbkStop;3:仅用FdbkOpen和FdbkClose;4:仅用FdbkStop;5:仅用FdbkClose;6:仅用FdbkOpen;7:无反馈FdbkClose: 关反馈FdbkOpen: 开反馈FdbkStop: 停反馈GName: 块名称InvFdbkClose: 关反馈信号取反InvFdbkOpen: 开反馈信号取反InvFdbkStop: 停反馈信号取反LockOut: 禁操Mode: 手/自动状态 0:手动,1:自动NumState: 设备指令数 2:开关两指令,3:开关停三指令OpCmd: 操作员命令 1:开命令,2:关命令,3:停命令,4:复位OpMode: 0-自动,1-手动OSCmdFail: 开失败OSFdbkLost: 开反馈失去OvrdClose: 联锁关OvrdClose_P: 0-联锁关长信号,1-联锁关脉冲信号OvrdOpen: 联锁开OvrdOpen_p: 0-联锁开长信号,2-联锁开脉冲信号OvrdPri: 联锁级别 0:先到起作用;1:开/关/停;2:开/停/关;3:关/开/停;4:关/停/开;5:停/关/开;6:停/开/关; OvrdStop: 联锁停PlsTimSP: 指令脉冲宽度(秒)PmtClose: 关允许条件PmtOpen: 开允许条件PmtStop: 停允许条件ReAlarmTime: 再次报警时间.已确认的报警如在此时间内未消失再次发出报警,0:无此功能Reset: 复位SetAuto: 置快自动状态SetMan: 置快手动状态TransTimSP: 行程时间(秒)Trip: 设备跳闸九、允许条件(PERMIT)这是一个与BCA块一起使用,是允许开或关的条件,其输出为:Out=(Permit1+BypassPermit1)*(Permit2+BypassPermit2)*(Permit3+BypassPermit3) *(Permit4+BypassPermit4) …(Permit15+BypassPermit15)+FreezeOut其各引脚功能如下:Permit1: 允许条件1Permit2: 允许条件2Permit3: 允许条件3Permit4: 允许条件4Permit5: 允许条件5Permit6: 允许条件6Permit7: 允许条件7Permit8: 允许条件8Permit9: 允许条件9Permit10: 允许条件10Permit11: 允许条件11Permit12: 允许条件12Permit13: 允许条件13Permit14: 允许条件14Permit15: 允许条件15Permit1Txt: 允许条件1描述Permit2Txt: 允许条件2描述Permit3Txt: 允许条件3描述Permit4Txt: 允许条件4描述Permit5Txt: 允许条件5描述Permit6Txt: 允许条件6描述Permit7Txt: 允许条件7描述Permit8Txt: 允许条件8描述Permit9Txt: 允许条件9描述Permit10Txt: 允许条件10描述Permit11Txt: 允许条件11描述Permit12Txt: 允许条件12描述Permit13Txt: 允许条件13描述Permit14Txt: 允许条件14描述Permit15Txt: 允许条件15描述BypassPermit1: 允许条件1旁路开关BypassPermit2: 允许条件2旁路开关BypassPermit3: 允许条件3旁路开关BypassPermit4: 允许条件4旁路开关BypassPermit5: 允许条件5旁路开关BypassPermit6: 允许条件6旁路开关BypassPermit7: 允许条件7旁路开关BypassPermit8: 允许条件8旁路开关BypassPermit9: 允许条件9旁路开关BypassPermit10: 允许条件10旁路开关BypassPermit11: 允许条件11旁路开关BypassPermit12: 允许条件12旁路开关BypassPermit13: 允许条件13旁路开关BypassPermit14: 允许条件14旁路开关BypassPermit15: 允许条件15旁路开关FreezeOut: 输出强制十、联锁首出块(INTERLOCKING)这是一个与BCA块一起使用,是联锁开或关的条件,其输出为:Out=IN1*BypassIn1+IN2*BypassIn2+IN3*BypassIn3+IN4*BypassIn4+IN5*BypassIn5+…+IN16*BypassIn16+Trip*Mode 其各引脚功能如下:ClearMem 清除firstout以前的首出记录Desc 描述FirstOut 当前的首出码Freeze 闭锁首出In1 第一个输入In10 第十个输入In10Txt 第十个输入的描述In11 第十一个输入In11Txt 第十一个输入的描述In12 第十二个输入In12Txt 第十二个输入的描述In13 第十三个输入In13Txt 第十三个输入的描述In14 第十四个输入In14Txt 第十四个输入的描述In15 第十五个输入In15Txt 第十五个输入的描述In16 第十六个输入In16Txt 第十六个输入的描述In1Txt 第一个输入的描述In2 第二个输入In2Txt 第二个输入的描述In3 第三个输入In3Txt 第三个输入的描述In4 第四个输入In4Txt 第四个输入的描述In5 第五个输入In5Txt 第五个输入的描述In6 第六个输入In6Txt 第六个输入的描述In7 第七个输入In7Txt 第七个输入的描述In8 第八个输入In8Txt 第八个输入的描述In9 第九个输入In9Txt 第九个输入的描述InvIn1 第一个输入取反InvIn10 第十个输入取反InvIn11 第十一个输入取反InvIn12 第十二个输入取反InvIn13 第十三个输入取反InvIn14 第十四个输入取反InvIn15 第十五个输入取反InvIn16 第十六个输入取反InvIn2 第二个输入取反InvIn3 第三个输入取反InvIn4 第四个输入取反InvIn5 第五个输入取反InvIn6 第六个输入取反InvIn7 第七个输入取反InvIn8 第八个输入取反InvIn9 第九个输入取反MemTrip1 前一次首出MemTrip2 前二次首出MemTrip3 前三次首出MemTrip4 前四次首出MemTrip5 前五次首出MemTripTime1 前一次首出的时间MemTripTime2 前二次首出的时间MemTripTime3 前三次首出的时间MemTripTime4 前四次首出的时间MemTripTime5 前五次首出的时间OpRst 操作员复位RmtRst 远程复位ShDesc 短描述Trip 当前的首出TripTime 当前的首出时间BypassIn1 第一个输入的旁路开关BypassIn2 第二个输入的旁路开关BypassIn3 第三个输入的旁路开关BypassIn4 第四个输入的旁路开关BypassIn5 第五个输入的旁路开关BypassIn6 第六个输入的旁路开关BypassIn7 第七个输入的旁路开关BypassIn8 第八个输入的旁路开关BypassIn9 第九个输入的旁路开关BypassIn10 第十个输入的旁路开关BypassIn11 第十一个输入的旁路开关BypassIn12 第十二个输入的旁路开关BypassIn13 第十三个输入的旁路开关BypassIn14 第十四个输入的旁路开关BypassIn15 第十五个输入的旁路开关BypassIn16 第十六个输入的旁路开关Mode 输出复位选择,0:输出无需复位,1:输出需复位。