24GHz车载雷达射频前端设计
- 格式:pdf
- 大小:4.32 MB
- 文档页数:74
车载防撞雷达研究与设计作者:李海涛田宇航任震赵静来源:《电子技术与软件工程》2018年第19期摘要车载防撞雷达作为汽车主动安全的核心,可有效降低事故发生概率。
本文设计并实现了一个车载防撞雷达系统,并提出一种新的目标探测算法,通过测试实验,该系统达到了预期设计指标。
【关键词】防撞雷达多目标配对 DSP LFMCW雷达车载防撞雷达是主动式安全技术的核心部件,其可以对目标实现自主检测,同时判断是否报警等功能。
本文围绕车载防撞雷达系统展开了研究,分析其基本工作原理,搭建车载防撞雷达硬件平台,研究雷达系统的目标探测算法,实现汽车防撞雷达的测速和测距功能。
1 车载防撞雷达的基本原理车载防撞雷达目的是获取目标的距离速度信息,根据策略采取有效措施并主动报警。
1.1 车载防撞雷达测距测速原理线性调频连续波(LFMCW)雷达调制方式简单,具有优良测距能力并且功率小,是车载防撞雷达最常用的一种方式,因此采用LFMCW作为本文车载防撞雷达系统的工作体制。
LFMCW体制雷达的工作原理是将信号的频率按照一定的线性斜率进行调制并发射,利用回波的时延来解算目标的信息。
当目标运动时,目标会和雷达产生相对速度(具有多普勒频移),但存在距离速度耦合,LFMCW通过采用不同斜率的调制波来去除耦合效应,从而完成对距离和速度的解算。
1.2 车载防撞雷达的总体设计要求道路环境的复杂决定了雷达系统应能够快速并且能够精准的探测本车周围目标。
根据使用要求,对车载防撞雷达系统提出以下总体指标要求:中心载频(f):24.125GHz波长(λ):12.4mm扫频带宽(B):250MHz距离分辨率(△R):<1m速度分辨率(△v):<1m/s水平波束宽度:≥15°测距范围:1m-50m最大可测速度:30m/s更新时间:≤40ms2 车载防撞雷达硬件系统的设计2.1 雷达系统的整体结构方案车载防撞雷达系统的整体结构方案见图1所示,系统以常见的LFMCW雷达系统为基础,主要是由收发天线、射频前端、中频信号调理模块、信号处理模块、调制波发生器组成。
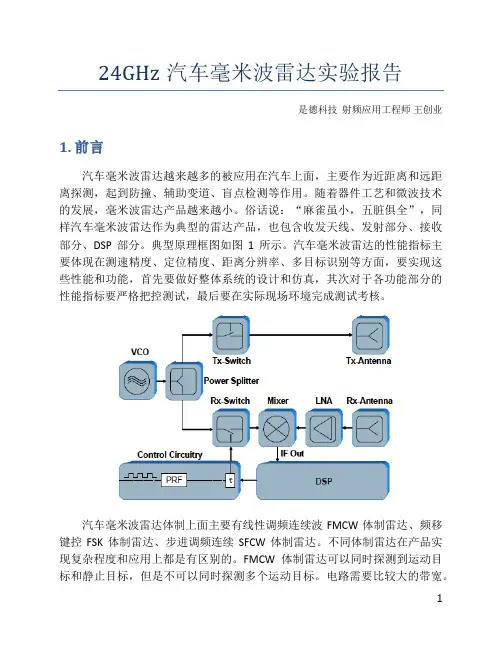
24GHz汽车毫米波雷达实验报告是德科技射频应用工程师王创业1. 前言汽车毫米波雷达越来越多的被应用在汽车上面,主要作为近距离和远距离探测,起到防撞、辅助变道、盲点检测等作用。
随着器件工艺和微波技术的发展,毫米波雷达产品越来越小。
俗话说:“麻雀虽小,五脏俱全”,同样汽车毫米波雷达作为典型的雷达产品,也包含收发天线、发射部分、接收部分、DSP部分。
典型原理框图如图1所示。
汽车毫米波雷达的性能指标主要体现在测速精度、定位精度、距离分辨率、多目标识别等方面,要实现这些性能和功能,首先要做好整体系统的设计和仿真,其次对于各功能部分的性能指标要严格把控测试,最后要在实际现场环境完成测试考核。
汽车毫米波雷达体制上面主要有线性调频连续波FMCW体制雷达、频移键控FSK体制雷达、步进调频连续SFCW体制雷达。
不同体制雷达在产品实现复杂程度和应用上都是有区别的。
FMCW体制雷达可以同时探测到运动目标和静止目标,但是不可以同时探测多个运动目标。
电路需要比较大的带宽。
FSK体制雷达,可以同时探测并且正确区分开来多个运动目标,但是不可以正确测量静止目标。
电路带宽比窄,系统响应捕获比较慢,成本比FMCW体制要低很多。
SFCW体制雷达,可以同时探测多个静止和运动的目标,并且将各个目标正确区分开来。
SFCW体制雷达具有更为复杂的调制波形,信号处理也更为复杂,产品实现成本高。
2.实验目的在汽车毫米波雷达系统研制过程中,经常会碰到各式各样的问题,譬如系统波形的选择和设计、系统链路的设计、信号处理算法的选择、微波电路的设计调试、天线的设计。
主要的问题主要体现在系统方案、处理算法模拟、微波电路指标调试及对系统性能的影响上。
典型的例子,在FMCW雷达系统,雷达探测距离分辨率不仅与信号的调制带宽有关,还与FMCW调制的线性度有关。
利用是德科技平台化解决方案,即软件+硬件+工程师,可以很容易的实现雷达系统设计仿真、处理算法验证、微波电路设计测试、天线设计测试。
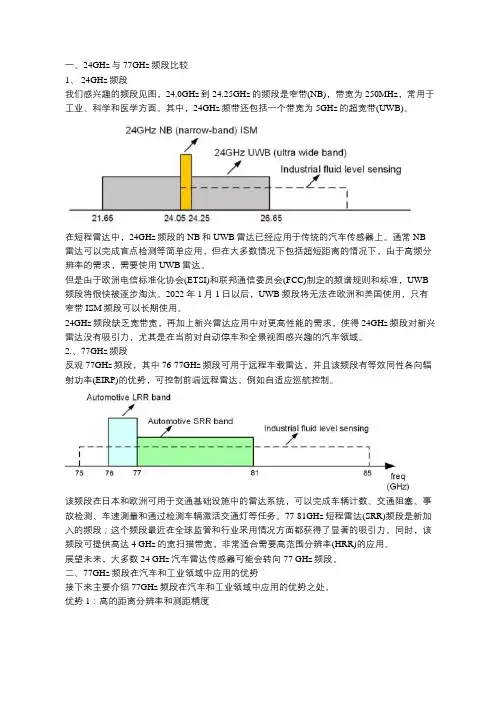
一、24GHz与77GHz频段比较1、 24GHz频段我们感兴趣的频段见图,24.0GHz到24.25GHz的频段是窄带(NB),带宽为250MHz,常用于工业、科学和医学方面。
其中,24GHz频带还包括一个带宽为5GHz的超宽带(UWB)。
在短程雷达中,24GHz频段的NB和UWB雷达已经应用于传统的汽车传感器上。
通常NB 雷达可以完成盲点检测等简单应用,但在大多数情况下包括超短距离的情况下,由于高频分辨率的需求,需要使用UWB雷达。
但是由于欧洲电信标准化协会(ETSI)和联邦通信委员会(FCC)制定的频谱规则和标准,UWB 频段将很快被逐步淘汰。
2022年1月1日以后,UWB频段将无法在欧洲和美国使用,只有窄带ISM频段可以长期使用。
24GHz频段缺乏宽带宽,再加上新兴雷达应用中对更高性能的需求,使得24GHz频段对新兴雷达没有吸引力,尤其是在当前对自动停车和全景视图感兴趣的汽车领域。
2.、77GHz频段反观77GHz频段,其中76-77GHz频段可用于远程车载雷达,并且该频段有等效同性各向辐射功率(EIRP)的优势,可控制前端远程雷达,例如自适应巡航控制。
该频段在日本和欧洲可用于交通基础设施中的雷达系统,可以完成车辆计数、交通阻塞、事故检测、车速测量和通过检测车辆激活交通灯等任务。
77-81GHz短程雷达(SRR)频段是新加入的频段;这个频段最近在全球监管和行业采用情况方面都获得了显著的吸引力。
同时,该频段可提供高达4 GHz的宽扫描带宽,非常适合需要高范围分辨率(HRR)的应用。
展望未来,大多数24 GHz汽车雷达传感器可能会转向77 GHz频段。
二、77GHz频段在汽车和工业领域中应用的优势接下来主要介绍77GHz频段在汽车和工业领域中应用的优势之处。
优势1:高的距离分辨率和测距精度与24GHz频段下的只有200MHz带宽的ISM频段相比,77GHz频段下的SRR频带可提供高达4GHz的扫描带宽,显著提高了距离分辨率和精度。
工业和信息化部关于发布24GHz频段短距离车载雷达设备使用频率的通知文章属性•【制定机关】工业和信息化部•【公布日期】2012.11.19•【文号】工信部无[2012]548号•【施行日期】2012.11.19•【效力等级】部门规范性文件•【时效性】现行有效•【主题分类】通信业正文工业和信息化部关于发布24GHz频段短距离车载雷达设备使用频率的通知(工信部无〔2012〕548号)为提高我国车辆的道路行车安全,满足汽车电子设备对无线电频谱资源的需求,根据我国无线电频率划分规定及频谱资源使用情况,经研究,将24.25-26.65GHz频段规划用于24GHz短距离车载雷达设备的使用。
具体事宜通知如下:一、24GHz短距离车载雷达设备的射频要求:(一)使用频率: 24.25-26.65GHz;(二)发射信号带宽(-10dB带宽)至少500MHz;(三)发射信号的等效全向辐射功率谱密度限值符合要求(详见附件1);(四)窄带杂散辐射限值符合相关要求(详见附件2)。
二、根据《中华人民共和国无线电频率划分规定》对有关射电天文业务保护的有关规定,在我国北京密云天文台、新疆乌鲁木齐南山天文台、上海佘山天文台、青海德令哈天文台等射电天文台址周围5公里范围内,禁止使用24GHz短距离车载雷达设备。
三、24GHz短距离车载雷达设备按微功率(短距离)无线电发射设备进行管理。
设备投入使用前需获得工业和信息化部核发的无线电发射设备型号核准证。
四、24GHz短距离车载雷达设备使用时,不得对其他无线电业务电台产生无线电干扰,也不得对其他无线电业务电台提出干扰保护要求。
特此通知。
附件1:发射信号的等效全向辐射功率谱密度限值附件2:窄带杂散辐射限值工业和信息化部2012年11月19日附件1:附件2:窄带杂散辐射限值。
射频接收机前端AGC系统的电路设计提纲:一、射频接收机前端AGC系统的基本原理及设计要点二、传统射频接收机前端AGC系统挑战及优化设计技术三、现代射频接收机前端AGC系统设计方法研究四、射频接收机AGC系统的性能评估与实验测量五、未来射频接收机前端AGC系统的发展趋势和展望一、射频接收机前端AGC系统的基本原理及设计要点AGC(Automatic Gain Control)系统是射频接收机的重要组成部分,在信道不稳定的环境下可以实现信号输入电平的自动控制。
其主要功能是控制单位电平内射频前端放大器的信息增益,以确保信号在最佳的动态范围内运行。
射频接收机前端AGC系统的设计要点主要包括信号放大段、包络检波环节、比较环节和控制回路。
其中,信号放大段的设计为AGC系统的核心,关系到整个系统性能的优劣。
当前,射频接收机前端AGC系统的设计主要分为两大类:一类是传统模拟AGC系统,它采用经典的线性控制回路,具有结构简单,功耗低,抗干扰能力强等优点;另一类是数字AGC系统,它基于DSP的现代控制理论,具有精度高,响应速度快等优点。
二、传统射频接收机前端AGC系统挑战及优化设计技术目前,传统AGC系统仍然是射频接收机中最常用的设计方案之一。
然而,传统AGC系统在设计中还存在一些挑战,主要包括信号失真、抗干扰能力不足和高功耗等问题。
为克服这些问题,优化设计技术主要包括:1、引入自适应控制器,利用反馈控制环节提高控制精度和系统鲁棒性,增强系统的稳定性和抗干扰能力。
2、优化模拟电路设计,提高系统带宽、增益平坦度和延时响应特性,并减少失真和噪声干扰。
3、使用低功耗模拟电路设计,降低系统功耗并提高信号处理速度。
三、现代射频接收机前端AGC系统设计方法研究现代射频接收机前端AGC系统采用数字控制理论,利用高速AD/DA转换器实现对系统的数字控制。
其优点在于精度高,控制方便和响应速度快等。
目前,现代AGC系统主要分为三类:1、基于改进的遗传算法和FPGA的AGC系统,该设计主要以FPGA为核心控制器,利用改进的遗传算法实现AGC控制回路,并通过DSP进行算法协调。
两大24GHz汽车毫米波雷达芯片方案毫米波雷达指工作在毫米波波段的雷达。
采用雷达向周围发射无线电,通过测定和分析反射波以计算障碍物的距离、方向和大小。
典型应用有汽车防撞雷达、直升机防控雷达和精密跟踪雷达等,目前最新的汽车毫米波雷达可以识别出车和行人。
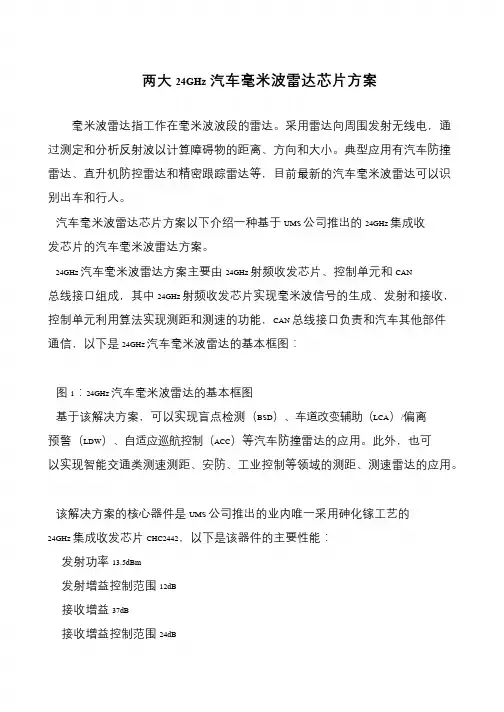
汽车毫米波雷达芯片方案以下介绍一种基于UMS 公司推出的24GHz 集成收发芯片的汽车毫米波雷达方案。
24GHz 汽车毫米波雷达方案主要由24GHz 射频收发芯片、控制单元和CAN 总线接口组成,其中24GHz 射频收发芯片实现毫米波信号的生成、发射和接收,控制单元利用算法实现测距和测速的功能,CAN 总线接口负责和汽车其他部件通信,以下是24GHz 汽车毫米波雷达的基本框图:图1:24GHz 汽车毫米波雷达的基本框图基于该解决方案,可以实现盲点检测(BSD)、车道改变辅助(LCA)/偏离预警(LDW)、自适应巡航控制(ACC)等汽车防撞雷达的应用。
此外,也可以实现智能交通类测速测距、安防、工业控制等领域的测距、测速雷达的应用。
该解决方案的核心器件是UMS 公司推出的业内唯一采用砷化镓工艺的24GHz 集成收发芯片CHC2442,以下是该器件的主要性能:发射功率13.5dBm发射增益控制范围12dB接收增益37dB接收增益控制范围24dB噪声系数11dB(中频大于100KHz,射频增益最大)输入1dB 压缩点-16dBmVCO 相噪-90dBc/Hz@100KHz温度范围-40℃到125℃工作电压3.3V封装QFN4*5,满足RoHS 标准UMS 推出的24GHz 雷达收发芯片以汽车级的工作温度范围、更大的发射功率,优良的VCO 输出相噪等优势成为24GHz 汽车毫米波雷达方案的最佳选择。
24G 微波频率VCO 方案针对24GHz 汽车毫米波雷达系统,UMS 推出了适用于分立系统的压控振荡器(VCO)产品CHV2421-QDG。
该器件是一款GaAs InGaP 异质结双极性晶体管(HBT)MMIC VCO,CHV2421-QDG 内部集成了谐振器、负电阻器件、变容二极管和预分频器。
• 203•24GHz雷达高线性数字调频源设计广东工贸职业技术学院 浙江大学深圳研究院 钟催林浙江大学深圳研究院 李振林广东工贸职业技术学院 曾洁琼【摘要】本文设计了一个基于PLL实时跟踪DDS产生高线性调频源的技术方案,并通过实验得到验证。
简要介绍该方案的主要技术指标以及高线性数字调频源的具体设计过程,论述在设计过程中的重点和难点,并提出相应的解决方案,最终达到了各项技术指标。
【关键词】高线性;调频源;相位噪声;杂散1.引言数字式频率合成技术 (DDS)作为一种新的频率合成技术,将先进的数字信号处理理论与方法引入信号合成领域,DDS技术实际就是数字信号处理中信号综合的硬件实现的问题,即根据给定的信号的幅度、频率、相位等参数,产生所要求的信号,所以 DDS技术的关键是信号参数到信号波形变换的实现。
在 DDS系统中,信号用数字方法产生,可提供对信号相位、幅度和频率的数字控制,从理论上能以任何方式合成任意一个波形,且 DDS以其固有的良好的宽带特性,良好的幅度控制特性,在现代电子器件、通信技术、目标识别雷达、卫星通信等领域有着广泛的应用前景。
图1 本振源设计原理图2.主要技术指标该部分主要是针对基于PLL跟踪DDS输入参考信号的高线性数字调频微波信号源的研究。
该数字调频源的技术指标如下:工作频率范围:12~12.15GHz;工作带宽:150MHz;调制周期:400μs;频率步进:0.1kHz;步进时间:32ns;输出功率:≥7dBm;相位噪声:≤-76dBc/Hz@10kHz;杂散:≤-55dBc。
其原理框图如图1所示,D D S的参考输入频率为50M H z,经内部PLL锁相电路倍频到250MHz作为采样时钟,输出频段为50~50.625MHz的三角形调频源。
锁相环的分频比N/R为240,可得锁相端输出信号为12~12.15GHz,功率为7dBm的线性扫频信号源。
由于本项目中需要使用单片机控制DDS和锁相芯片,考虑到系统体积以及芯片引脚控制的需要,本项目采用一个单片机同时控制DDS 和锁相芯片。

24ghz毫米波雷达人体感应原理毫米波雷达技术是一种近年来备受关注的无线通信和感知技术,其在人体感应领域具有重要的应用前景。
毫米波雷达人体感应原理研究的深入,将有助于提高人体感应设备的性能和可靠性,拓展其在智能家居、智能医疗、智能安防等领域的应用。
本文将重点探讨24GHz毫米波雷达人体感应原理及其相关技术,为该领域的研究和发展提供参考。
首先,毫米波雷达技术是一种利用微波信号进行探测和感知的技术,其工作频率在毫米波频段(30GHz~300GHz)范围内。
相较于传统的红外和超声波感应技术,毫米波雷达具有穿透能力强、不受环境影响、高分辨率等优势,因此在人体感应领域备受关注。
24GHz毫米波雷达是一种常用的工作频率,在人体感应中具有广泛的应用。
毫米波雷达人体感应原理主要基于雷达回波信号与人体之间的相互作用,通过分析回波信号的幅值、相位、多普勒频移等信息,可以实现对人体姿态、呼吸、心跳等生理信息的感知。
当一个人或物体进入毫米波雷达的探测范围时,会与发射的信号相互作用,导致回波信号的变化,通过信号处理和算法分析,即可实现对人体的感知和监测。
24GHz毫米波雷达人体感应原理的研究主要包括以下几个方面:首先是信号的发射和接收。
毫米波雷达通过发射天线发射高频信号,经过人体反射后,通过接收天线接收回波信号。
其次是信号处理和算法。
通过对接收到的信号进行处理和算法分析,可以提取人体的特征信息,实现对人体的感知和监测。
最后是系统性能评估。
对毫米波雷达人体感应系统的性能进行评估,包括探测距离、分辨率、鲁棒性等指标的测试和分析,以不断优化系统性能。
在24GHz毫米波雷达人体感应原理的研究中,信号处理和算法设计是关键的环节。
信号处理主要包括滤波、降噪、解调等操作,旨在提取有效的信息并去除噪声干扰。
算法设计则是对接收到的信号进行特征提取和识别,常用的算法包括傅里叶变换、小波变换、卡尔曼滤波等。
通过不同的信号处理和算法设计,可以提高系统的性能和准确性,实现对人体的高效感知。
24ghz 单片微波集成电路1. 介绍•单片微波集成电路是一种用于24 GHz频段的电路,可实现高频率和高性能的微波射频系统。
它是微波通信和雷达系统中关键的组成部分,广泛应用于无线通信、雷达测量等领域。
2. 概述•24 GHz频段是一种重要的无线通信频段,广泛用于汽车雷达、工业雷达等应用中。
单片微波集成电路是一种整合了射频、混频、放大器和可调谐滤波器等核心功能的芯片,能够在24 GHz频段上实现高性能的射频处理。
3. 24 GHz频段的应用•24 GHz频段在无线通信和雷达应用中具有广泛的应用前景。
以下是几个典型的应用案例:3.1 汽车安全雷达•24 GHz频段被广泛用于汽车安全雷达系统中,以实现车辆之间的碰撞避免和自动紧急制动等功能。
单片微波集成电路在这些应用中起到关键的作用,能够提供高性能的射频接收和信号处理能力。
3.2 工业雷达•工业雷达用于测量和检测工业环境中的目标物体,如液位测量、距离测量等。
24 GHz频段的微波集成电路可在这些应用中提供高精度和稳定性的信号处理能力。
3.3 无线通信系统•24 GHz频段作为一种短距离高速通信频段,被广泛应用于无线通信系统中。
单片微波集成电路可以提供高频率的射频信号和高增益的放大功能,从而实现高速数据传输。
4. 单片微波集成电路的特点•单片微波集成电路具有以下几个突出的特点:4.1 高性能射频处理•单片微波集成电路能够在24 GHz频段上实现高性能的射频接收和信号处理,提供高增益、低噪声和高线性度的射频链路,从而实现高质量的信号传输。
4.2 高集成度•单片微波集成电路采用高度集成的设计,将射频、混频、放大器和滤波器等功能集成在一个芯片中,减小了系统体积和功耗,提高了系统的可靠性和稳定性。
4.3 可调谐滤波器•单片微波集成电路中常常包含可调谐滤波器的功能,可以在不同频率下实现灵活的滤波和频率调节。
这对于不同应用场景的需求非常重要,能够提供更好的适应性和灵活性。
24GHz FMCW雷达收发器芯片组的特点与应用介绍本文介绍了适于汽车和工业传感器应用的24GHz FMCW雷达收发器芯片组,ADF5904搭配IC (发射机ADF5901芯片和ADF4159 PLL)使用兼具高性能相位噪声、输出功率和高速斜坡能力,使该器件针对传感器具有更低的噪底性能。
ADF5904:4通道、24GHz接收机下变频器MMICADF5904集成式多通道接收机下变频器具有10dB噪声系数性能,优于竞争型对手器件3dB。
该器件功耗低50% ,采用小型、性价比高的5mm×5mm LFCSP塑料封装。
该器件的四个片内接收通道采用简单的单端连接与四个独立天线相连,从而简化了射频传输线设计和PCB布局布线,同时缩小了电路板尺寸。
接收机下变频器可同时直接放大并转换4路24GHz接收机信号,以产生高质量、高幅度基带信号或降低频率信号,以便轻松连接ADI 4通道模数转换器或模拟前端(AFE)。
ADF5904还提供集成式温度传感器,无需使用分立式检测元件,这些元件原本可能需要在系统装配和测试期间占用额外的时间与资源来校准。
ADF5904针对采用数字波束成形的多通道接收机高频应用设计,如汽车ADAS雷达、微波雷达传感器和工业雷达系统,在这些应用中,能效正在成为越来越重要的系统级设计考虑因素。
ADF5904 24GHz接收机具有同类一流的接收机灵敏度,相比竞争型RF IC技术整体功耗更低,因而适合此类应用以及其它传感器应用。
主要特性4 个接收通道,接收机通道增益:22dB;噪声系数:1 0 d B ,P 1 d B :-10dBm;功耗:0.5mW(全部4个通道开启);LO输入范围:-8dBm至+5dBm;接收机至IF隔离:30dB;RF信号带宽:250MHz;。
超高速通信电路与系统技术概论课程报告小组成员:学院:信息科学与工程学院指导老师:二零一七年六月24GHz车载雷达原理与设计1.研究背景与车载雷达的发展与应用1.1研究背景自从1904年德国工程师里斯蒂安在柏林皇家专利会上取得了雷达设计的发明专利以后,雷达的发展可谓是日新月异。
雷达最初的目的在于无线电检测和测距,辐射出能量并检测反射回来的波,根据时间差可计算出与目标物体之间的距离。
现在技术较为成熟的是调频连续波雷达,一个频率连续变化的波,其中一部分波束信号作为参考物,另一部分波束信号辐射出去,经过目标物体局部反射后的信号与参考信号进行混频从而产生一个差频信号,通过信号处理则可以得到距离。
这种技术不仅精度极高,同时成本较低,因此广为流行。
据调查统计,追尾是交通事故最主要的发生形式,尤其是高速公路上的超速现象和雨雪雾霾天气更是事故的导火索。
交通事故大多数是驾驶员没有意识到前方车辆距离自身车辆太近或者完全来不及反应所造成的,如果驾驶员能提前0.5秒意识到危险的靠近,那么交通事故将减少至少一半。
对此,目前已采取了许多措施,其中主要有安全带、安全气囊和保险杠等,但这都只是“治标不治本”。
要想从根本上解决问题,汽车安全间距检测系统的存在必不可少。
汽车安全间距检测系统主要的作用为停车辅助和防止碰撞。
停车辅助是指驾驶员在倒车时倒车雷达会帮助他们探测后视镜看不见的物体,通常是用来探测后方物体的距离,当距离过小存在危险时,警报会发出声响提醒驾驶员注意,通常距离越小警报声显得越危急。
除此之外,碰撞避免是指在碰撞快要发生时发出警报提醒驾驶员及时作出应对,减少驾驶员的反应时间,极大程度地避免了碰撞的发生。
该系统同样也是以雷达为基础,雷达如图1.1所示,它不断探测周围车辆的距离和速度,不仅会发出警报,必要时也会自动拐弯或是减速。
由此可见,汽车安全间距检测系统对于减少交通事故的发生起着不可替代的关键作用。
图1-1防撞雷达示意图由于交通事故率每一年都在上涨,汽车雷达得到了业内人士越来越多的关注,从上个世纪70年代至今,渐渐出现了超声波、激光、红外、微波等多种方式的汽车雷达系统。
在24GHz频段,雷达系统通常需要考虑以下约束条件:
1. 频率资源限制:24GHz频段是有限的,各国对24GHz频段的使用都有相应的规定和限制。
因此,雷达系统在设计时应遵守当地的频率管理法规和相关标准,以确保其合法合规使用。
2. 电磁干扰:随着各种无线通信技术的发展,24GHz频段的使用越来越拥挤,电磁干扰问题也日益突出。
雷达系统应充分考虑周围环境的电磁环境,合理选择发射功率、频率和波形,以减少对其他系统的干扰。
3. 灵敏度要求:对于雷达系统来说,灵敏度是一个重要的性能指标。
在24GHz频段,目标的反射面积较小,因此需要较高的灵敏度才能更好地检测目标。
4. 分辨率要求:雷达系统的分辨率决定了其能够区分目标的能力。
在24GHz频段,由于波长较短,分辨率要求较高,需要采取相应的技术措施来提高分辨率。
5. 环境适应性:24GHz频段的电磁波传播特性与低频段有所不同,需要考虑环境因素对雷达系统性能的影响。
例如,在植被覆盖区域,雷达系统的性能可能会受到影响。
因此,需要在系统设计时考虑环境适应性。
综上所述,24GHz雷达系统在设计和使用时应充分考虑频率资源限制、电磁干扰、灵敏度要求、分辨率要求以及环境适应性等因素,以确保其性能和合法合规使用。
摘 要:连续波体制雷达的发射功率可在一段时间内实现功率平均分配,发射峰值功率小、环境适应性强,因此易于结构优化、电路简单。
文章在STM32架构上设计了一款24GHz 毫米波调频连续波(frequency modulation continuous wave,FMCW)雷达系统。
经LabView 平台仿真和实物验证,最终可生成频率为100Hz,峰值为2.56V 的调频连续波。
该系统由于易实现、效率高,可在自适应巡航和交通监管等方向开展应用。
关键词:调频连续波;差频信号;测距雷达;STM32单片机;中图分类号:TN95 文献标识码:AA Design of FMCW Radar System Based on STM32 SystemRen Jian Ding Xu Guo Guofa Zhao Dong(Shenyang University of Technology,Liaoning,Shenyang ,110870)Abstract:The transmission power of the continuous wave radar can realize the average power distribution within a period of time,the transmission peak power is small,and the environmental adaptability is strong,so it is easy to optimize the structure and the circuit is simple.This paper designs a 24GHz millimeter wave frequency modulation continuous wave (FMCW) radar system on the STM32 architecture.Through LabView platform simulation and physical verification,it can finally generate a frequency-modulated continuous wave with a frequency of 100Hz and a peak-to-peak value of 2.56V. Due to its easy implementation and high efficiency,this system can be applied in adaptive cruise and traffic supervision.Key words: FM continuous wave; Difference frequency signal; Ranging radar; STM32 microcontroller;一种基于STM32系统的FMCW 雷达系统设计任建 丁旭 郭国发 赵冬(沈阳工业大学信息科学与工程学院,辽宁,沈阳, 110870)作者简介:任建,女,1981年生,工学博士,讲师,研究方向:微波测量。
24GHz雷达传感器的运用电路图本产品可广泛应用于类似自动门控制开关、安全防范系统、ATM自动提款机的自动录像控制系统、火车自动信号机等,需要自动感应控制的场所。
这是一种标准的24GHz雷达传感器,这种探测方式与其它探测方式相比具有如下的优点:1、非接触探测;2、不受温度、湿度、噪声、气流、尘埃、光线等影响,适合恶劣环境;3、抗射频干扰能力强;4、输出功率仅有10mW,对人体构不成危害;5、远距离:探测范围超过20米。
多普勒原理简介:多普勒理论是以时间为基础的,当无线电波在行进过程中碰到物体时,该电波会被反射,反射波的频率会随碰到物体的移动状态而改变。
如果无线电波碰到的物体的位置是固定的,那么反射波的频率和发射波的频率应该相等。
如果物体朝着发射的方向移动,则反射回来的波会被压缩,就是说反射波的频率会增加;反之,当物体朝着远离发射的方向移动时,反射回来的波的频率会随之减小,这就是多普勒效应。
这种现象在日常生活中会经常遇到,比如一辆鸣笛的警车从你身边高速通过时,你听到的声音的频率是变化的:当警车高速接近你的时候,(与静止声源相比)声音传输的时间缩短,频率升高。
当警车远离你的时候,声音的传输时间拉长,频率降低。
应用实例一:自动门控制、ATM提款机自动录像控制本电路作用距离4-15米连续可调,和热释电红外探测器相比,具有抗强光干扰,探测距离远,不受温、湿度影响等优点。
电路原理简述:图中U1是微波感应探测器模块,通过K202,K203,R202,R219向模块提供2kHz 的脉动电源(能产生频率为2khz 高电平宽度为20uS的电路很多,如使用反向器CD4069、lm555 等),K201在U1起作用期间导通,把U1输出的反应物体移动的低频信号选通输出,C202为采样保持电路,保证信号的连续和完整。
由LM358组成的两极低通放大电路把U1的输出放大,在LM358的1脚输出。
可调电阻R213 用于调整一级放大器的增益,调整R213的大小可以调整探测距离。
汽车雷达微带阵列天线设计
吕虹;李晓璇;陶新雯;陈万里
【期刊名称】《测控技术》
【年(卷),期】2018(037)004
【摘要】为提高汽车雷达性能,设计了一款汽车雷达天线,采用4×8微带阵列天线形式,设计中心频率为24.1 GHz,采用指数加权的方式设计馈电网络,以降低副瓣.在HFSS电磁仿真平台上对其进行仿真、优化.仿真结果显示天线最大增益为21.4 dBi,副瓣电平低于-15 dB,H面半功率波束宽度约为10°,在24 ~ 24.5 GHz频段性能稳定.天线整体长约70 mm,宽约36 mm,体积小.将该天线应用于汽车雷达可以探测车辆和障碍物的速度、距离、角度等信息,从而实现防撞预警、盲点侦测等功能.
【总页数】4页(P88-91)
【作者】吕虹;李晓璇;陶新雯;陈万里
【作者单位】安徽建筑大学电子与信息工程学院,安徽合肥230601;安徽建筑大学电子与信息工程学院,安徽合肥230601;安徽建筑大学电子与信息工程学院,安徽合肥230601;安徽建筑大学电子与信息工程学院,安徽合肥230601
【正文语种】中文
【中图分类】TN82
【相关文献】
1.毫米波汽车雷达微带天线设计 [J], 侯亚玲
2.并联型非均匀间距微带阵列天线设计 [J], 徐统民;张峰干;王旭健
3.面向高炉料面监测的宽带微带阵列天线设计 [J], 王宇;于静娜;陈先中;侯庆文
4.基于菱形单元的宽带微带栅格阵列天线设计 [J], 郝刚;刘宇峰;陈新伟;韩国瑞
5.一种小型化宽频带微带阵列天线设计 [J], 张海辉;叶俊
因版权原因,仅展示原文概要,查看原文内容请购买。