4-2+杠杆原理[1]
- 格式:ppt
- 大小:161.50 KB
- 文档页数:37

精选初中物理《杠杆》教案通过对杠杆的研究,让学生逐步学会透过现象认识事物本质的方法,培养学生观察能力和用科学的方法解决问题的能力。
培养交流与合作的能力和学习物理的兴趣。
下面是白话文整理的精选初中物理《杠杆》教案【优秀4篇】,在大家参照的同时,也可以分享一下白话文给您最好的朋友。
杠杆教学设计教案篇一第一种思路:首先通过实例让学生认识杠杆,然后介绍杠杆的五要素,并通过作图来强化。
再通过实验探究杠杆的平衡条件。
第二种思路:首先通过实例让学生认识杠杆,只介绍杠杆的支点、动力和阻力,然后由跷跷板猜想影响杠杆平衡的因素,并通过实验探究杠杆的平衡,在实验过程中,再加入用弹簧测力计斜拉的实验,让学生认识到影响杠杆平衡的因素,不是支点到力的作用点的距离,而是支点到力的作用线的距离,由此引入力臂。
然后在此基础上总结出杠杆的平衡条件。
在上述两种思路中,您赞成哪种方法,理由是什么?谈谈您自己在教学中的做法及设计意图。
我的选择是第二种思路。
一、设计意图二、设计思路我是如此设计的,首先根据课标的要求,确定本节的教学目标:1、知识与技能(1)能通过观察生活和生产劳动中的各种杠杆,提取其共同特征,来认识杠杆。
(2)能在杠杆上确认支点、动力、动力臂、阻力、阻力臂。
(3)会画力臂(4)能理解杠杆的平衡条件2、过程与方法(1)通过观察和实验,了解杠杆的结构。
(2)通过参与科学探究活动,能对杠杆的平衡进行猜想与假设,并设计出实验方案,对获得的信息进行处理,得出杠杆平衡的条件。
3、情感、态度与价值观培养学生探索杠杆在日常生活中应用的兴趣以及关注历史、关注科学的意识。
根据目标和本节教材特点,确定教学重点和难点:教学重难点力臂概念的建立,杠杆平衡条件的探究及认识过程要求学生课前准备:(1)寻找生活中与杠杆相关的图片和工具,例如:各种用途的剪刀(理发剪、手术剪、手工剪、园艺剪等)、指甲剪、镊子、钳子、羊角锤、钢丝钳,螺丝刀等。
(2)绘图工具:直尺、铅笔教学过程设计:1、创设情境,引发问题。


机械设计手册一组力学公式的探讨周治】,赵家乐2,胥正皆2(1.重庆天辰精工科技有限公司,重庆402760;•重庆伊士顿电梯有限责任公司,重庆401336)摘 要:机械设计类手册往往给出了常见的四滑块工作台直线运动载荷计算公式,其中一组力学计算公式的使用条件是工作台水平使用(滑块运动),匀速运动或静止时,外加载荷W 不与工作台中心重合。
根据实践中对该组计算公式的使用情况,文中对公式正确性提出了质疑;然后对该组公式进行了理论推导,得到了一组与手册中不相同的载荷计算公式,并进一步推导了该载荷计算公式的简化表达式,其直观性强,易记易用;最后利用Creo 5.0进行有限元分析,对文中推导载荷计算公式的应用结果进行了验证。
关键词:手册;滑块;载荷;Creo5.0 ;分析中图分类号:TH 12 文献标志码:A文章编号:1002-2333( 2021)05-0120-03Discussion on a Group of Mechanical Formulas in Mechanical Design ManualZHOU Zhi 1, ZHAO Jiale 2, XU Zhengjie 2(1. Chongqing Tianchen Seiko Technology Co., Ltd., Chongqing 402760, China;2. Chongqing Eastern Elevator Co., Ltd., Chongqing 401336, China)Abstract: Mechanical design manuals often give common calculation formulas for the linear motion load of a four-sliderworkbench. The use conditions of a group of mechanical calculation formulas are that the workbench is used horizontally(slider movement), and the application is applied when moving at a constant speed or at rest, the load W does not coincidewith the center of the table. This paper raises questions about the correctness of the formulas based on the use of this setof calculation formulas in the work; then theoretically derives the set of formulas, and obtains a set of load calculationformulas that are different from those in the manual. The simplified expression of the load calculation formula is further deduced, which is intuitive, easy to remember and easy to use. Creo 5.0 is used to perform finite element analysis to verifythe application results of the derived load calculation formula.Keywords: manual; slider; load; Creo5.0; analysis0引言机械设计手册作为机械行业广泛使用的工具书,具有权威性、准确性、实用性,所选内容基本、常用、重要,工 程技术人员工作中参考它可提高机械设计制造质量和效 率,使用者往往对机械设计手册中给出的数学公式、物理公式、力学公式、设计方法深信不疑。
光杠杆放大法测量微小长度变化量的原理光杠杆系统包括光杠杆平面镜M ,水平放置的望远镜和竖直标尺。
光杠杆平面镜M 如图4-2-3所示。
光杠杆是将一小圆形平面反射镜M 固定在下面有三个足尖f 1,f 2和f 3的“T ”形三角支架上,f 1,f 2,f 3三点构成一个等腰三角形。
平面镜倾角及后足尖f 1到前足尖f 2,f 3连线的垂直距离均可调。
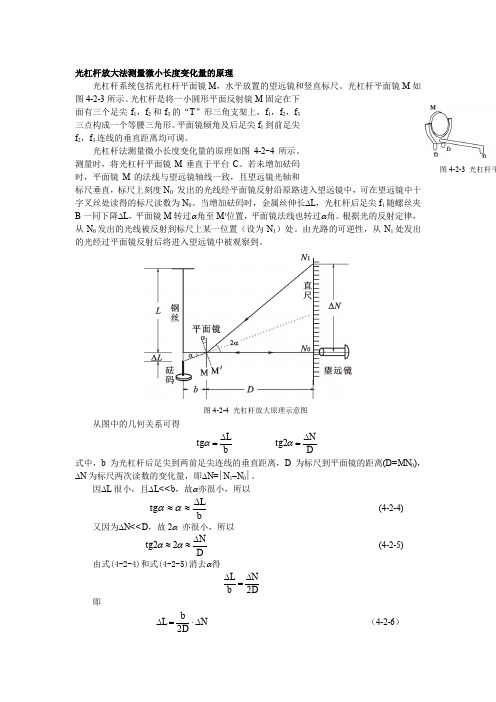
光杠杆法测量微小长度变化量的原理如图4-2-4所示。
测量时,将光杠杆平面镜M 垂直于平台C 。
若未增加砝码时,平面镜M 的法线与望远镜轴线一致,且望远镜光轴和标尺垂直,标尺上刻度N 0 发出的光线经平面镜反射沿原路进入望远镜中,可在望远镜中十字叉丝处读得的标尺读数为N 0。
当增加砝码时,金属丝伸长∆L ,光杠杆后足尖f 1随螺丝夹B 一同下降∆L ,平面镜M 转过α角至M '位置,平面镜法线也转过α角。
根据光的反射定律,从N 0发出的光线被反射到标尺上某一位置(设为N 1)处。
由光路的可逆性,从N 1处发出的光经过平面镜反射后将进入望远镜中被观察到。
图4-2-4 光杠杆放大原理示意图从图中的几何关系可得b L ∆=αtg DN ∆=α2tg 式中,b 为光杠杆后足尖到两前足尖连线的垂直距离,D 为标尺到平面镜的距离(D=MN 0),∆N 为标尺两次读数的变化量,即∆N =∣N 1-N 0∣。
因∆L 很小,且∆L<<b ,故α亦很小,所以bL ∆≈≈ααtg (4-2-4) 又因为∆N<<D ,故2α 亦很小,所以DN ∆≈≈αα22tg (4-2-5) 由式(4-2-4)和式(4-2-5)消去α得D N b L 2∆=∆ 即N Db L ∆⋅=∆2 (4-2-6)图4-2-3光杠杆平利用光杠杆装置测量微小长度变化量的实质是将微小长度的变化量∆L ,经光杠杆装置转变为微小角度变化α,再经过望远镜直尺组转变为标尺上较大范围的读数变化量∆N 。

科学教科版六年级上册第三单元第3课《不简单的杠杆》说课稿(新版)4一. 教材分析《不简单的杠杆》这一课是科学教科版六年级上册第三单元的第3课。
本节课的主要内容是让学生通过观察、实验和探究,了解杠杆的分类、特点以及应用。
教材以生动有趣的实例和实验,引导学生认识杠杆的平衡条件,使学生能够运用杠杆原理解决实际问题。
二. 学情分析六年级的学生已经具备了一定的观察、实验和探究能力。
他们对杠杆的概念有一定的了解,但可能对杠杆的分类、特点和应用还不够清晰。
因此,在教学过程中,我需要注重引导学生通过实验和探究活动,加深对杠杆的理解。
三. 说教学目标1.知识与技能:学生能够了解杠杆的分类、特点和应用,学会使用杠杆原理解决实际问题。
2.过程与方法:学生通过观察、实验和探究,培养观察和动手能力,提高科学思维能力。
3.情感态度价值观:学生培养对科学的兴趣和探究精神,认识到科学知识在生活中的重要性。
四. 说教学重难点1.教学重点:学生能够理解杠杆的分类、特点和应用。
2.教学难点:学生能够运用杠杆原理解决实际问题。
五. 说教学方法与手段本节课采用实验探究、小组合作和讲授法相结合的教学方法。
通过实验和探究活动,激发学生的兴趣和探究欲望,培养学生的观察和动手能力。
同时,通过小组合作,促进学生之间的交流和合作,提高学生的团队协作能力。
此外,结合讲授法,系统地引导学生掌握杠杆的知识点。
六. 说教学过程1.导入:通过一个有趣的杠杆实验,引发学生对杠杆的好奇心,激发学生的学习兴趣。
2.探究活动:学生分组进行实验,观察和记录杠杆的分类、特点和应用。
教师引导学生思考和讨论,帮助学生深入理解杠杆原理。
3.知识讲解:教师对杠杆的分类、特点和应用进行详细讲解,引导学生掌握相关知识。
4.应用拓展:学生分组讨论,尝试运用杠杆原理解决实际问题。
教师给予指导和支持,帮助学生将知识运用到实际情境中。
5.总结与反思:学生和教师共同总结本节课的学习内容,反思自己的学习过程和方法。

人教鄂教版五年级下4.11《杠杆》教学设计课题杠杆单元 4 学科科学年级 5学习目标1.认识杠杆的结构,发现用杠杆撬起重物可以省力。
2.通过利用杠杆尺进行研究,了解杠杆特点。
3.利用身边材料实验探究杠杆省力的秘密。
4.了解杠杆类工具的特点及应用。
重点用平衡尺研究杠杆。
难点将平衡尺平衡的秘密与用杠杆撬起重物建立对应关系。
教学过程教学环节教师活动学生活动设计意图导入新课1、学校开展科学实践活动时,常会用到许多工具。
这些工具有什么用途?它们的设计有什么科学道理?这些装置构造简单,既能减轻人们的劳动强度,又能提高工作效率,被称为简单机械。
开启单元学习之旅,探索一些简单机械的奥秘。
2、学校的墙壁要经常粉刷。
哪种工具能帮我们轻松地撬开涂料桶盖?预测:螺丝刀、铁钉、小铁棒,……3、怎样做,才能轻松地撬开桶盖?说一说自己的想法,并从工具箱中选择合适的工具进行演示。
例如,将螺丝刀的刀头放在桶和桶盖的缝隙间,中间垫在桶壁上,手握螺丝刀柄,用力向下压,便可轻松撬开桶盖。
4、饼干罐、奶粉罐的盖子常常盖得很紧,一般没有专门开盖的工具。
人们经常借助小棒、螺丝刀或钉子等工具打开罐头盖。
通常把小棒、螺丝刀、钉子这类能将物体掀起的工具叫做撬棒。
科学上,把类似撬棒这样能围绕一个固定支点转动的硬杆叫作杠杆。
杠杆是由一个支点和一根能绕支点转动的硬棒组成。
杠杆具备三个要素:支点、动力作用点和阻力作用点。
回答交流表达并演示认真听导入单元学习认识杠杆结构,导入杠杆秘密探索。
讲授新课一、科学实验:探究杠杆的秘密(一)认识杠杆尺1、杠杆尺是杠杆的一种平衡状态下的研究模型。
它由什么组成?明确:2、杠杆尺有什么特点?明确:◆横杠能围绕支点转动◆横杠处于平衡状态◆横杠左右两边有小格,距离相等提示:挂在杠杆尺左边的钩码看作是重物钩码挂的格数就是阻力作用点的位置。
挂在杠杆尺右边的钩码的重量就是提起重物所用的力。
钩码挂的格数就是动力作用点的位置。
3、仔细观察杠杆尺,它跟撬棒有什么相似之处?明确:杠杆尺跟撬棒都有支点、动力作用点和阻力作用点。
常用物理符号及公式算法大全1、匀速直线运动的速度公式:求速度:v=s/t ;求路程:s=vt;求时间:t=s/v2、变速直线运动的速度公式:v=s/t3、物体的物重与质量的关系:G=mg (g=9.8N/kg)4、密度的定义式:求物质的密度:ρ=m/V;求物质的质量:m=ρV;求物质的体积:V=m/ρ4-1、压强的计算:定义式:p=F/S(物质处于任何状态下都能适用)液体压强:p=ρgh(h为深度)求压力:F=pS 求受力面积:S=F/p5、浮力的计算:称量法:F浮=G—F ;公式法:F浮=G排=ρ排V排g ;漂浮法:F 浮=G物(V排<V物);悬浮法:F浮=G物(V排=V物)6、杠杆平衡条件:F1L1=F2L27、功的定义式:W=Fs8、功率定义式:P=W/t对于匀速直线运动情况来说:P=Fv (F为动力)9、机械效率:η=W有用/W总对于提升物体来说:W有用=Gh(h为高度)W总=Fs10、斜面公式:FL=Gh11、物体温度变化时的吸热放热情况Q吸=cmΔt(Δt=t-t0);Q放=cmΔt(Δt=t0-t)12、燃料燃烧放出热量的计算:Q放=qm13、热平衡方程:Q吸=Q放14、热机效率:η=W有用/ Q放(Q放=qm)15、电流定义式:I=Q/t (Q为电量,单位是库仑)16、欧姆定律:I=U/R;变形求电压:U=IR ;变形求电阻:R=U/I;17、串联电路的特点:(以两纯电阻式用电器串联为例)电压的关系:U=U1+U2 ;电流的关系:I=I1=I2 ;电阻的关系:R=R1+R218、并联电路的特点:(以两纯电阻式用电器并联为例)电压的关系:U=U1=U2 ;电流的关系:I=I1+I2 ;电阻的关系:1/R=1/R1+1/R219、电功的计算:W=UIt20、电功率的定义式:P=W/t ;常用公式:P=UI21、焦耳定律:Q放=I2Rt对于纯电阻电路而言:Q放=I2Rt =U2t/R=UIt=Pt=UQ=W22、照明电路的总功率的计算:P=P1+P1+……速度υ=S / t 1m / s = 3.6 Km / h声速υ=340m / s光速C=3×108 m /s密度ρ= m / V 1 g / c m3 = 103 Kg / m3合力F = F1 - F2F = F1 + F2 F1、F2在同一直线线上且方向相反F1、F2在同一直线线上且方向相同压强p = F / Sp =ρg h p = F / S适用于固、液、气p =ρg h适用于竖直固体柱p =ρg h可直接计算液体压强答案补充1标准大气压= 76 cmHg柱= 1.01×105 Pa = 10.3 m水柱浮力①F浮= G –F②漂浮、悬浮:F浮= G③F浮= G排=ρ液g V排④据浮沉条件判浮力大小(1)判断物体是否受浮力(2)根据物体浮沉条件判断物体处于什么状态(3)找出合适的公式计算浮力物体浮沉条件(前提:物体浸没在液体中且只受浮力和重力):①F浮>G(ρ液>ρ物)上浮至漂浮②F浮=G(ρ液=ρ物)悬浮杠杆平衡条件:F1 L1 = F2 L 2 杠杆平衡条件也叫杠杆原理滑轮组F = G / n F =(G动+ G物)/ nSF = n SG 理想滑轮组忽略轮轴间的摩擦n:作用在动滑轮上绳子股数功:W = F S = P t 1J = 1N?m = 1W?s 答案补充功率:P = W / t = Fυ1KW = 103 W,1MW = 103KW有用功:W有用=Gh(竖直提升)= F S(水平移动)= W总–W额=ηW总额外功:W额= W总–W有= G动h(忽略轮轴间摩擦)= f L(斜面)总功:W总= W有用+ W额= F S = W有用/ η机械效率η= W有用/ W总η=G /(n F)= G物/(G物+ G动)定义式,适用于动滑轮、滑轮组物理量单位公式名称符号名称符号质量m 千克kg m=pv温度t 摄氏度°C速度v 米/秒m/s v=s/t密度p 千克/米3 kg/m3 p=m/v 答案补充力(重力)F 牛顿(牛)N G=mg 压强P 帕斯卡(帕)Pa P=F/S功W 焦耳(焦)J W=Fs功率P 瓦特(瓦)w P=W/t电流I 安培(安)A I=U/R电压U 伏特(伏)V U=IR电阻R 欧姆(欧)R=U/I电功W 焦耳(焦)J W=UIt电功率P 瓦特(瓦)w P=W/t=UI热量Q 焦耳(焦)J Q=cm(t-t°)比热c 焦/(千克°C)J/(kg°C)真空中光速3×108米/秒g 9.8牛顿/千克15°C空气中声速340米/秒安全电压不高于36伏③F浮<G(ρ液<ρ物)下沉杠杆平衡条件:F1 L1 = F2 L 2 杠杆平衡条件也叫杠杆原理滑轮组F = G / nF =(G动+ G物)/ n答案补充SF = n SG 理想滑轮组忽略轮轴间的摩擦n:作用在动滑轮上绳子股数功:W = F S = P t 1J = 1N?m = 1W?s功率:P = W / t = Fυ1KW = 103 W,1MW = 103KW有用功:W有用=Gh(竖直提升)= F S(水平移动)= W总–W额=ηW总额外功:W额= W总–W有= G动h(忽略轮轴间摩擦)= f L(斜面)总功:W总= W有用+ W额= F S = W有用/ η机械效率η= W有用/ W总η=G /(n F)= G物/(G物+ G动)定义式,适用于动滑轮、滑轮组物理量单位公式名称符号名称符号质量m 千克kg m=pv温度t 摄氏度°C速度v 米/秒m/s v=s/t密度p 千克/米3 kg/m3 p=m/v力(重力)F 牛顿(牛)N G=mg压强P 帕斯卡(帕)Pa P=F/S 答案补充功W 焦耳(焦)J W=Fs功率P 瓦特(瓦)w P=W/t电流I 安培(安)A I=U/R电压U 伏特(伏)V U=IR电阻R 欧姆(欧)R=U/I电功W 焦耳(焦)J W=UIt电功率P 瓦特(瓦)w P=W/t=UI热量Q 焦耳(焦)J Q=cm(t-t°)比热c 焦/(千克°C)J/(kg°C)真空中光速3×108米/秒g 9.8牛顿/千克15°C空气中声速340米/秒安全电压不高于36伏答案补充:库仑定律:F=kQ1Q2/r2(在真空中){F:点电荷间的作用力(N),k:静电力常量k=9.0×109N??m2/C2,Q1、Q2:两点电荷的电量(C),r:两点电荷间的距离(m),方向在它们的连线上,作用力与反作用力,同种电荷互相排斥,异种电荷互相吸引}答案补充:1.电流强度:I=q/t{I:电流强度(A),q:在时间t内通过导体横载面的电量(C),t:时间(s)}2.欧姆定律:I=U/R {I:导体电流强度(A),U:导体两端电压(V),R:导体阻值(Ω)}3.电阻、电阻定律:R=ρL/S{ρ:电阻率(Ω??m),L:导体的长度(m),S:导体横截面积(m2)}4.闭合电路欧姆定律:I=E/(r+R)或E=Ir+IR也可以是E=U内+U外{I:电路中的总电流(A),E:电源电动势(V),R:外电路电阻(Ω),r:电源内阻(Ω)}5.电功与电功率:W=UIt,P=UI{W:电功(J),U:电压(V),I:电流(A),t:时间(s),P:电功率(W)}6.焦耳定律:Q=I2Rt{Q:电热(J),I:通过导体的电流(A),R:导体的电阻值(Ω),t:通电时间(s)}7.纯电阻电路中:由于I=U/R,W=Q,因此W=Q=UIt=I2Rt=U2t/R8.电源总动率、电源输出功率、电源效率:P总=IE,P出=IU,η=P出/P总{I:电路总电流(A),E:电源电动势(V),U:路端电压(V),η:电源效率9.电路的串/并联串联电路(P、U与R成正比) 并联电路(P、I与R成反比)电阻关系(串同并反) R串=R1+R2+R3+ 1/R并=1/R1+1/R2+1/R3+电流关系I总=I1=I2=I3 I并=I1+I2+I3+电压关系U总=U1+U2+U3+ U总=U1=U2=U3功率分配P总=P1+P2+P3+ P总=P1+P2+P3+答案补充光的反射和折射(几何光学)答案补充:1.反射定律α=i {α;反射角,i:入射角}2.绝对折射率(光从真空中到介质)n=c/v=sin /sin {光的色散,可见光中红光折射率小,n:折射率,c:真空中的光速,v:介质中的光速,:入射角,:折射角}3.全反射:1)光从介质中进入真空或空气中时发生全反射的临界角C:sinC=1/n 答案补充磁场1.磁感应强度是用来表示磁场的强弱和方向的物理量,是矢量,单位:(T),1T=1N/A??m2.安培力F=BIL;(注:L⊥B) {B:磁感应强度(T),F:安培力(F),I:电流强度(A),L:导线长度(m)}3.洛仑兹力f=qVB(注V⊥B);质谱仪〔见第二册P155〕{f:洛仑兹力(N),q:带电粒子电量(C),答案补充V:带电粒子速度(m/s)}电磁感应1.[感应电动势的大小计算公式]1)E=nΔΦ/Δt(普适公式){法拉第电磁感应定律,E:感应电动势(V),n:感应线圈匝数,ΔΦ/Δt:磁通量的变化率}2)E=BLV垂(切割磁感线运动) {L:有效长度(m)}3)Em=nBSω(交流发电机最大的感应电动势){Em:感应电动势峰值}4)E=BL2ω/2(导体一端固定以ω旋转切割){ω:角速度(rad/s),V:速度(m/s)}2.磁通量Φ=BS {Φ:磁通量(Wb),B:匀强磁场的磁感应强度(T),S:正对面积(m2)}十四、交变电流(正弦式交变电流)1.电压瞬时值e=Emsinωt 电流瞬时值i=Imsinωt;(ω=2πf)2.电动势峰值Em=nBSω=2BLv 电流峰值(纯电阻电路中)Im=Em/R总3.正(余)弦式交变电流有效值:E=Em/(2)1/2;U=Um/(2)1/2 ;I=Im/(2)1/24.理想变压器原副线圈中的电压与电流及功率关系U1/U2=n1/n2;I1/I2=n2/n2;P入=P出答案补充电磁振荡和电磁波1.LC振荡电路T=2π(LC)1/2;f=1/T {f:频率(Hz),T:周期(s),L:电感量(H),C:电容量(F)}2.电磁波在真空中传播的速度c=3.00×108m/s,λ=c/f {λ:电磁波的波长(m),f:电磁波频率}答案补充电场1.两种电荷、电荷守恒定律、元电荷:(e=1.60×10-19C);带电体电荷量等于元电荷的整数倍2.库仑定律:F=kQ1Q2/r2(在真空中){F:点电荷间的作用力(N),k:静电力常量k=9.0×109N??m2/C2,Q1、Q2:两点电荷的电量(C),r:两点电荷间的距离(m),方向在它们的连线上,作用力与反作用力,同种电荷互相排斥,异种电荷互相吸引}3.电场强度:E=F/q(定义式、计算式){E:电场强度(N/C),是矢量(电场的叠加原理),q:检验电荷的电量(C)}4.真空点(源)电荷形成的电场E=kQ/r2 {r:源电荷到该位置的距离(m),Q:源电荷的电量}5.匀强电场的场强E=UAB/d {UAB:AB两点间的电压(V),d:AB两点在场强方向的距离(m)}6.电场力:F=qE {F:电场力(N),q:受到电场力的电荷的电量(C),E:电场强度(N/C)}7.电势与电势差:UAB=φA-φB,UAB=WAB/q=-ΔEAB/q 答案补充8.电场力做功:WAB=qUAB=Eqd{WAB:带电体由A到B时电场力所做的功(J),q:带电量(C),UAB:电场中A、B两点间的电势差(V)(电场力做功与路径无关),E:匀强电场强度,d:两点沿场强方向的距离(m)}9.电势能:EA=qφA {EA:带电体在A点的电势能(J),q:电量(C),φA:A点的电势(V)}10.电势能的变化ΔEAB=EB-EA {带电体在电场中从A位置到B位置时电势能的差值}11.电场力做功与电势能变化ΔEAB=-WAB=-qUAB (电势能的增量等于电场力做功的负值)12.电容C=Q/U(定义式,计算式) {C:电容(F),Q:电量(C),U:电压(两极板电势差)(V)}13.平行板电容器的电容C=εS/4πkd(S:两极板正对面积,d:两极板间的垂直距离,ω:介电常数)常见电容器14.带电粒子在电场中的加速(Vo=0):W=ΔEK或qU=mVt2/2,Vt=(2qU/m)1/2 答案补充15.带电粒子沿垂直电场方向以速度Vo进入匀强电场时的偏转(不考虑重力作用的情况下)类平垂直电场方向:匀速直线运动L=Vot(在带等量异种电荷的平行极板中:E=U/d) 抛运动平行电场方向:初速度为零的匀加速直线运动d=at2/2,a=F/m=qE/m答案补充:(1)两个完全相同的带电金属小球接触时,电量分配规律:原带异种电荷的先中和后平分,原带同种电荷的总量平分;(2)电场线从正电荷出发终止于负电荷,电场线不相交,切线方向为场强方向,电场线密处场强大,顺着电场线电势越来越低,电场线与等势线垂直;(3)常见电场的电场线分布要求熟记;(4)电场强度(矢量)与电势(标量)均由电场本身决定,而电场力与电势能还与带电体带的电量多少和电荷正负有关;(5)处于静电平衡导体是个等势体,表面是个等势面,导体外表面附近的电场线垂直于导体表面,导体内部合场强为零,导体内部没有净电荷,净电荷只分布于导体外表面;(6)电容单位换算:1F=106μF=1012PF;(7)电子伏(eV)是能量的单位,1eV=1.60×10-19J 答案补充气体的性质答案补充:1.气体的状态参量:温度:宏观上,物体的冷热程度;微观上,物体内部分子无规则运动的剧烈程度的标志,热力学温度与摄氏温度关系:T=t+273 {T:热力学温度(K),t:摄氏温度(℃)}体积V:气体分子所能占据的空间,单位换算:1m3=103L=106mL压强p:单位面积上,大量气体分子频繁撞击器壁而产生持续、均匀的压力,标准大气压:1atm=1.013×105Pa=76cmHg(1Pa=1N/m2)2.气体分子运动的特点:分子间空隙大;除了碰撞的瞬间外,相互作用力微弱;分子运动速率很大3.理想气体的状态方程:p1V1/T1=p2V2/T2 {PV/T=恒量,T为热力学温度(K)}(1)理想气体的内能与理想气体的体积无关,与温度和物质的量有关;(2)公式3成立条件均为一定质量的理想气体,使用公式时要注意温度的单位,t为摄氏温度(℃),而T为热力学温度(K)。
第十二章简单机械本章概述一、杠杆1.定义:一根硬棒,在力的作用下如果能绕着固定点转动,这根硬棒叫杠杆.2.五要素:一点、二力、两力臂.(1)“一点”即支点,杠杆绕着转动的点,用“O”表示.(2)“二力”即动力和阻力,它们的作用点都在杠杆上.动力是使杠杆转动的力,一般用“F1”表示,阻力是阻碍杠杆转动的力,一般用“F2”表示.(3)“两力臂”即动力臂和阻力臂,动力臂即支点到动力作用线的距离,一般用“l1”表示,阻力臂即支点到阻力作用线的距离,一般用“l2”表示.3.杠杆的平衡(杠杆在动力和阻力作用下静止不动或匀速转动叫杠杆平衡)条件是动力×动力臂=阻力×阻力臂;公式:F1l1=F2l2.(1)省力杠杆:l1>l2,F1<F2(省力费距离,如撬棒、铡刀、动滑轮、轮轴、羊角锤、钢丝钳、手推车、花枝剪刀).(2)费力杠杆:l1<l2,F1>F2(费力省距离,如人的前臂、理发剪刀、钓鱼竿).(3)等臂杠杆:l1=l2,F1=F2(不省力、不省距离,能改变力的方向.等臂杠杆的具体应用:天平.许多称质量的秤,如杆秤、案秤,都是根据杠杆原理制成的).二、滑轮1.滑轮是变形的杠杆.(1)定义:中间的轴固定不动的滑轮.(2)实质:等臂杠杆.(3)特点:使用定滑轮不能省力但是能改变动力的方向.(4)对理想的定滑轮(不计轮轴间摩擦)F=G物.绳子自由端移动距离s F(或速度v F)=重物移动的距离s G(或速度v G)(1)定义:和重物一起移动的滑轮.(可上下移动,也可左右移动)(2)实质:动力臂为阻力臂2倍的省力杠杆.(3)特点:使用动滑轮能省一半的力,但不能改变动力的方向.(4)理想的动滑轮(不计轴间摩擦和动滑轮重力)则F=G物.只忽略轮轴间的摩擦则,拉力F=(G物+G动).绳子自由端移动距离s F(或v F)=2倍的重物移动的距离s G(或v G).(1)定义:定滑轮、动滑轮组合成滑轮组.(2)特点:使用滑轮组既能省力又能改变动力的方向.(3)理想的滑轮组(不计轮轴间的摩擦和动滑轮的重力)拉力F=G物.只忽略轮轴间的摩擦,则拉力F=(G物+G 动).绳子自由端移动距离s F(或v F)=n倍的重物移动的距离s G(或v G).(4)组装滑轮组方法:首先根据公式n=“奇动偶定”的原则.结合题目的具体要求组装滑轮.三、机械效率定义:对人们有用的功.公式:W有=Gh(提升重物)=W总-W额=ηW总.斜面:W有=Gh.定义:并非我们需要但又不得不做的功.公式:W额=W总-W有=G动h(忽略轮轴摩擦的动滑轮、滑轮组)斜面:W额=fL.定义:有用功加额外功或动力所做的功.公式:W总=W有+W额=Fs=.斜面:W总=fL+Gh=FL.定义:有用功跟总功的比值.公式:η=斜面:η=定滑轮:η===动滑轮:η===滑轮组:η===5.有用功总小于总功,所以机械效率总小于1.通常用百分数表示.某滑轮组机械效率为60%表示有用功占总功的60%.减小机械自重、减小机件间的摩擦.(1)原理:η==.(2)应测物理量:钩码重力G、钩码提升的高度h、拉力F、绳的自由端移动的距离s.(3)器材:除钩码、铁架台、滑轮、细线外还需刻度尺、弹簧测力计.(4)步骤:必须匀速拉动弹簧测力计使钩码升高,目的:保证测力计示数大小不变.(5)结论:影响滑轮组机械效率高低的主要因素有:①动滑轮越重,个数越多则额外功相对就多.②提升重物越重,做的有用功相对就多.③摩擦,若各种摩擦越大做的额外功就多.8.绕线方法和重物提升高度不影响滑轮机械效率.第1节杠杆1.认识杠杆,知道杠杆的几个概念,会确认并画出力臂.2.知道杠杆平衡条件.3.了解杠杆的一些应用.【教学难点】引导学生通过探究得出杠杆平衡条件.【教学难点】(1)通过实验,理解力臂概念.(2)杠杆平衡条件的运用.一、情境导入拔图钉:让班内力气最大的一名男生和班内力气最小的一名女生上台分别拔图钉. 男生:空手拔图钉,结果没拔出.女生:使用羊角锤拔图钉,结果图钉很容易拔出.二、新课教学讨论:下列工具工作时有什么共同特征?共同特征:有力作用在物体上、绕着固定点转动、硬棒.硬棒可以是直的,也可以是弯曲的,即硬棒可以是各种各样的形状.定义:一根硬棒,在力的作用下能绕着固定点O转动,这根硬棒就是杠杆.提问:在现实生活中,你还能举出哪些杠杆的实例呢?支点(O):杠杆绕着转动的点动力(F1):促使杠杆转动的力阻力(F2):阻碍杠杆转动的力动力臂(l1):从支点到动力作用线的垂直距离阻力臂(l2):从支点到阻力作用线的垂直距离提问:什么是力臂?力臂是支点到力的作用线的垂直距离.(1)力臂是一定在杠杆上吗?答:不是.(2)杠杆是否都是直的?答:杠杆可以是直的,也可以是弯的.(3)若一力作用在杠杆上,作用点不变,但作用方向改变,力臂是否改变? 答:要改变.画力臂的方法是:(1)辨认杠杆,找出支点、动力和阻力;(2)过力的作用点沿力的方向画出力的作用线;(3)从支点作出到力的作用线的垂直线;(4)用大括号将力臂括上,并标上符号.画出图中杠杆各力的力臂讨论:体重不同的两人能不能让跷跷板稳定下来?杠杆平衡:杠杆在动力和阻力作用下静止或匀速转动时,我们就说杠杆平衡. 问题:杠杆在满足什么条件时才会平衡呢?探究杠杆的平衡条件:(1)提出问题:杠杆平衡时,动力、动力臂、阻力、阻力臂之间存在着怎样的关系?(2)猜想与假设:假设一:=.假设二:F1l1=F2l2.(3)测量的物理量:力、力臂.(4)实验器材:杠杆、钩码、铁架台、弹簧测力计.(5)实验操作①调节平衡螺母,使杠杆在水平位置平衡(保证力臂沿杠杆,便于测量;消除杠杆自重对实验结果的影响).②1、阻力F2、动力臂l1、阻力臂l2记录在表格中.③改变阻力和阻力臂的大小,相应调节动力和动力臂的大小,再做几次实验.④1、阻力F2、动力臂l1、阻力臂l2记录在表格中.(1)省力杠杆:由F1l1=F2l2,因为l1>l2,所以F1<F2这是省力杠杆,省力杠杆的特点:省力、费距离.生活中的省力杠杆(2)费力杠杆:由F1l1=F2l2,l1<l2,得F1>F2,这是费力杠杆.费力杠杆的特点:费力、省距离.生活中的费力杠杆(3)等臂杠杆的特点:不省力、也不省距离.由F1l1=F2l2,l1=l2,得F1=F2,这是等臂杠杆.(4)三类杠杆的对比省力杠杆费力杠杆等臂杠杆概念动力臂大于阻力臂的杠杆动力臂小于阻力臂的杠杆动力臂小于阻力臂的杠杆特点省了力,但费了距离费了力,但省了距离不省力也不费力实例撬棒、铡刀、瓶起子、镊子、理发剪刀天平【课堂小结】通过今天的学习,同学们有哪些收获?在实验探究中又存在哪些问题?还有什么想探究的问题?学生可以个别回答,或相互交流,在交流的基础上进行学习小结.第1节杠杆一、杠杆及杠杆的五要素二、杠杆的平衡条件:F1l1=F2l2三、生活中的杠杆四、杠杆的分类:省力杠杆、费力杠杆、等臂杠杆1.下列测量工具没有利用杠杆原理的是( A )2.下列杠杆平衡的是(杆重和摩擦均不计)( C )3.如图所示,在杠杆的a处悬挂两个相同的钩码,若要使杠杆在水平位置平衡,可以采取的措施是( D )4.如图所示,作用在杠杆一端且始终与杠杆垂直的力F,将杠杆缓慢地由位置A拉至位置B,在这个过程中,力F的大小将( C )5.某同学分别用如图所示的a,b两种方法挑着同一个物体行走,a图中肩受到的压力小于b图中肩受到的压力;a图中手施加的动力小于b图中手施加的动力.(均填“大于”“等于”或“小于”).筷子,被外国人誉为“东方的文明”,是中华民族的国粹.它的使用,标志着中华民族文明的进步.美国哈佛大学一位人类学家认为,中国最古老的筷子的出现,大约是在公元前1 200多年以前,比西方人使用刀叉要早几百年.2.我国古代的简单机械(杠杆)我国古代的农业、手工业、建筑业和运输业是比较发达的,因此简单机械的成就也是辉煌的,杠杆的应用非常广泛.对于杠杆,在《墨经》中科学地叙述了其平衡原理,“相衡,则本短标长”.这里的“本”是指靠近支点一边的杆,“标”是指靠近重锤一边的杆.如果两边平衡,杠杆一定是水平的,被测重物一边杆短,重锤一边杆长.又说:“两加焉,重相若,则标必下,标得权也”,这就是说杠杆平衡后,两边加相等的重物,平衡会破坏,标这一边必然下降,这叫做“标得权”.从以上论述可以看出,墨家用确切的语言阐述了不等臂杠杆的科学原理.第2节滑轮1.认识定滑轮和动滑轮.2.知道定滑轮、动滑轮和滑轮组的作用.3.会根据要求使用和组装滑轮.4.了解其他简单机械(轮轴、斜面等)的一些应用.【教学重点】探究定滑轮、动滑轮的特点及实质,滑轮组省力情况的判断.【教学难点】理解定滑轮和动滑轮是变形的杠杆.一、新课导入这个故事中起到关键作用的是哪个部件?你见到过吗?我们用力向下拉绳子,国旗上升,你知道旗杆的顶部有什么装置吗?以此引入新课.二、新课教学滑轮:主要部分是能绕轴转动的轮子.滑轮结构,如图所示.想想议议:(1)你知道为什么会这样吗?(2)下面两个滑轮在使用上有什么不同呢?国旗上升时,旗杆顶端的滑轮不随物体一起移动. 货物上升时,电动机下面的滑轮随物体一起移动. 滑轮的分类研究定滑轮和动滑轮的特点播放多媒体视频定滑轮特点:(1)可以改变用力方向.(2)既不省力也不费力,也不省距离.(3)本质上,相当于一个等臂杠杆.动滑轮特点:(1)可以省一半的力,但不改变力的方向.(2)力的关系:F=.(3)距离关系:s=2h.(4)实质上是一个动力臂为阻力臂2倍的省力杠杆.思考1:动滑轮中,若拉力F沿斜上方拉,F=G吗?因为动力臂l1减小,所以动力F增大要使动滑轮省一半的力(省力最多),必须使绳子沿竖直方向拉.思考2:使用定滑轮能改变力的方向,但不能省力;使用动滑轮能省力,但不能改变力的方向.那我们能不能把两者结合起来,组成滑轮组,使其既可以改变力的方向,又能省力?用以下的动滑轮和定滑轮,可以组成怎样的滑轮组呢?播放滑轮组实验视频展示滑轮组动画(1)滑轮组用几段绳子吊起物体.将物体提升的力等于物重的几分之一,即F=.(2)手拉绳子通过的距离等于物体上升的距离的n倍,即s=nh.(忽略绳重与摩擦)滑轮组小结:①有几段绳子与动滑轮相连,n就为几;②重物上升h高度,绳子自由端要移动nh距离s=nh;③力的关系:F=G物(不计摩擦、绳重和动滑轮重).F=(G物+G动)(不计摩擦、绳重).(3)轮轴与斜面几种轮轴①井上的辘轳从右边看过去,可画成下图:动力臂大于阻力臂——省力杠杆.②汽车方向盘③水龙头动力臂大于阻力臂——省力杠杆.(4)其他轮轴轮轴:省力、费距离.(5)斜面也是一种省力机械斜面:省力、费距离.【课堂小结】通过今天的学习,同学们有哪些收获?在实验探究中又存在哪些问题?还有什么想探究的问题? 学生可以个别回答,或相互交流,在交流的基础上进行学习小结.第2节滑轮1.定滑轮:转轴固定不动的滑轮.特点:不能省力,但可以改变力的方向.实质:等臂杠杆.2.动滑轮:转动轴与重物一起移动的滑轮.特点:能省力一半,但不能改变力的方向.实质:动力臂是阻力臂两倍的杠杆.特点:使用滑轮组时,动滑轮被几股绳子吊起,所用力就是物重和动滑轮的几分之一.1.如图所示的是利用定滑轮匀速提升物体的三种方法,所用拉力分别是F1,F2和F3,下列式子中正确的是( C )1>F2>F31<F2<F31=F2=F32>F1>F32.如图所示,不考虑滑轮与轻绳之间的摩擦,米袋总重为800 N,而绳上吊着的静止的“绅士”重500 N,则米袋对地面的压力为( C )A.500 NB.250 NC.300 ND.800 N3.工人们为了搬运一个笨重的机器进入厂房,他们设计了如图所示的四种方案(机器下方的小圆表示并排放置的圆形钢管的横截面),其中最省力的方案是( C )4.小汉同学在“研究动滑轮特点”的实验时,进行了正确操作,并记录数据如下表,分析数据后发现,实验结果与课本中“使用动滑轮能省一半力”的结论不符.面对这一事实,下列做法中最不可取的是( B ) 实验次数物重G/N 拉力F/N123B.实验失败,停止实验C.改进实验条件,重新实验D.查阅资料,了解结论的适用条件1.我国古代的简单机械——辘轳辘轳的制造和应用,在古代是和农业的发展紧密结合的,它广泛地应用在农业灌溉上.我国在公元前1100年以前就发明了辘轳,根据《物原》记载:“史佚始作辘轳”(史佚是周代初期的史官).辘轳的应用在我国时间较长,虽经改进,但大体保持了原形,说明在3 000年前我们的祖先就设计了结构很合理的辘轳.解放前在我国的北方缺水地区,仍在使用辘轳提水灌溉小片土地.汽车起重机是装在普通汽车底盘或特制汽车底盘上的一种起重机,其行驶驾驶室与起重操纵室分开设置.这种起重机的优点是机动性好,转移迅速.缺点是工作时须支腿,不能负荷行驶,也不适合在松软或泥泞的场地上工作.汽车起重机的底盘性能等同于同样整车总重的载重汽车,符合公路车辆的技术要求,因而可在各类公路上通行无阻.此种起重机一般备有上、下车两个操纵室,作业时必需伸出支腿保持稳定.起重量的X围很大,可从8吨~1 000吨,底盘的车轴数,可从2~10根.是产量最大,使用最广泛的起重机类型.在起重臂里面的下面有一个转动卷筒,上面绕钢丝绳,钢丝绳通过在下一节臂顶端上的滑轮,将上一节起重臂拉出去,依此类推.缩回时,卷筒倒转回收钢丝绳,起重臂在自重作用下回缩.这个转动卷筒采用液压马达驱动,因此能看到两根油管,但不是油缸.第3节机械效率1.了解什么是有用功、额外功和总功.2.理解什么是机械效率.【教学重点】知道有用功、额外功和总功,理解机械效率.测量滑轮组的机械效率.【教学难点】测量简单机械的机械效率.一、新课导入直接提升物体做功,与使用机械提升物体做功相同吗?二、新课教学实验演示:使用动滑轮是否省功?(1)如图(甲),用弹簧测力计将钩码缓慢地提升一定的高度,计算拉力所做的功.(2)如图(乙),用弹簧测力计并借助一个动滑轮将同样的钩码缓慢地提升相同的高度,再次计算拉力所做的功.这两次拉力所做的功一样吗?为什么?(甲)图中拉力所做的功:W甲=F甲s甲=2 N×h(乙)图中拉力所做的功:W乙=F乙s乙=1.2 N×2h所以W甲<W乙实验结果表明,虽然在两次实验中钩码被提升了相同的高度,但第二次拉力做功反而多一些.这说明,使用动滑轮省力,但由于滑轮本身所受的重力以及摩擦等因素的影响,我们要多做功.有用功:对人们有用的功.额外功:人们不需要而又不得不做的功.总功:有用功与额外功之和.W总=W有+W额.思考一:用水桶从井中提水的时候,所做的功哪部分是有用功,哪部分是额外功?提水所做的功是有用功;提水桶所做的功是额外功.思考二:如果桶掉到井里,从井里捞桶的时候,捞上的桶里带了一些水,这种情况下哪部分是有用功,哪部分是额外功?捞桶做的功是有用功,提水做的功是额外功.(1)定义:有用功跟总功的比值.(2)公式:η==.讨论:W额>0,W总>W有,所以η<1.W额=0,W总=W有所以η=1(理想状态).注:机械效率常用百分数来表示.×104 J,起重机的机械效率是多少?g取10 N/kg.解析:重物的重力×103 kg×10 N/kg=5×103 N起重机提升重物所做的有用功W有=Gh=5×103 N××104J起重机的机械效率η===44%.答案:44%【巩固练习】一台起重机将重3 600 N的货物提高4 m.如果额外功是9 600 J,起重机做的有用功是多少?总功是多少?机械效率是多少?解析:起重机做的有用功、总功为W有=Gh=3 600 N××104JW总=W有+W额×104×104 J机械效率η===60%.×104×104 J 60%小资料起重机的机械效率一般为40%~50%;滑轮组的机械效率一般为50%~70%.抽水机的机械效率为60%~80%.【实验目的】(1)学习安装滑轮组.(2)学习测滑轮组的机械效率.(3)分析得出提高滑轮组机械效率的方法.【实验原理】η==.讨论:为得出滑轮组的机械效率,需要求出有用功和总功,为此需要测出哪些物理量?钩码重G,拉力F,钩码上升的高度h,拉力通过的距离s.【实验器材】刻度尺、钩码、弹簧测力计、滑轮组两个、铁架台、长约2 m的细绳.播放测量滑轮组实验视频,播放提高机械效率的方法视频.提高机械效率的方法(1)减小机械间的摩擦力.例如加强机械运动部位的润滑.(2)改进机械的结构,减小机械自重,例如动滑轮太重,使滑轮组机械效率很低,换用较轻滑轮就可提高其机械效率.(3)增加物重.【知识拓展】探究斜面的机械效率【提出猜想】斜面的机械效率可能和斜面的倾斜程度有关.【实验器材】长木板、小车、弹簧测力计、刻度尺.【实验装置】【实验过程】(1)测量小车的重量,记录数据.(2)把小车用弹簧测力计沿斜面匀速向上拉;分别记录拉力F、小车沿斜面移动的距离s、小车上升的高度h.(3)改变斜面的倾斜程度,重复步骤(2).注意事项要匀速拉动物体;拉力要与斜面平行;及时记录数据.记录表格斜面倾斜程度小车质量G/N斜面高度h/m拉力F/N斜面长s/m有用功W有/J总功W总/J机械效率η%较缓较陡很陡结论:光滑程度相同的斜面,斜面越倾斜,越费力,机械效率越高.分析:当斜面长度、高度、物重都相同时,斜面越粗糙,摩擦力越大,拉力越大,总功越大,有用功不变,机械效率越低.结论:斜面越粗糙,机械效率越低.【课堂小结】通过今天的学习,同学们有哪些收获?在实验探究中又存在哪些问题?还有什么想探究的问题?学生可以个别回答,或相互交流,在交流的基础上进行学习小结.第3节机械效率一、有用功:对人们有用的功额外功:人们不需要而又不得不做的功.总功:有用功与额外功之和.二、机械效率:有用功跟总功的比值公式:η==三、测量滑轮组的机械效率四、测量斜面的机械效率1.某同学不小心把水桶掉进井里,当他把桶从井里捞上来时,桶里带了一些水,下列有关有用功、额外功、总功的说法中正确的是( C )2.小文同学采用如图所示的两种不同的方式将同一货物搬运到同一辆汽车上,其中说法正确的是( C )C.两种情况下,小文做的有用功一样多3.如图所示,用拉力F使物体竖直匀速上升,下列说法正确的是( D )word4.如图所示,X伟同学通过斜面用平行于斜面F=200 N的推力,将质量为30 kg的物体在5 s时间内匀速推到1 m高的平台上,斜面长s=2 m.则(g取10 N/kg)( B )A.推力的功率为40 WB.斜面的机械效率为75%C.推力做的总功300 JD.斜面对物体的摩擦力为100 N5.一斜面长4.8 m、高1.2 m,把重为1 200 N的物体沿斜面从底端匀速拉到顶端,沿斜面的拉力为400 N,则总功为 1 920 J,有用功为 1 440 J,额外功为480 J.力(填“力”“功”或“距离”).用重为2 N的动滑轮匀速提升一个重物时,动滑轮的机械效率为75%;若改用重为1.5 N的动滑轮匀速提升同一重物,此动滑轮的机械效率为80% .(不计绳重和摩擦)机械效率与机械效益的联系和区别机械效率与机械效益是两个比较类同的概念,使用时稍不留心就要混淆.经过以上分析,我们可以得出以下两点:(1)机械效率是描写机械做功本领程度的一个物理量,它研究机械做功情况时引出;机械效益是描述机械省力程度的一个物理量,它研究机械省力情况时引出.(2)机械效率与机械效益都是一个无单位的纯数,机械效率η总是小于1,而机械效益A可以小于1,也可以等于1或大于1.21 / 21。