基于dsPIC30F2010的高性能航空陀螺逆变电源设计
- 格式:pdf
- 大小:341.23 KB
- 文档页数:4

基于dsPIC30F6010三相异步电动机控制系统的设计与实现刘陆;杨丽英【摘要】This paper introduces the structure and the design scheme of hardware and software of three-phase AC asynchro-nous motor control system based on the dsPIC30F6010 chip using digital double closed-loop vector control strategy. The chip of dsPIC30F6010 is adopted for the CPU development board, photoelectric encoder and the three-phase AC asynchronous motor. A new vector control system for induction motor is developed through the improvement of a driving power and a level conversion board of integrated IPM for current sensor. The results show that the motor is characterized by fast starting, stable operation, wide speed range and high precision, which meets the requirements of speed control for three-phase AC asynchronous motor.%介绍一种基于dsPIC30F6010芯片采用全数字双闭环矢量法控制三相交流异步电动机控制系统的结构及软硬件设计方案.以dsPIC30F6010芯片为CPU的开发板、光电编码器、三相交流异步电动机、经过改进电流传感器的集成IPM的驱动电源和自制电平转换板,构建了一个异步电动机的矢量控制系统.试验结果表明,电机起动快速,运行平稳,具有较宽的调速范围,精度较高,满足了对三相交流异步电动机的调速控制.【期刊名称】《现代电子技术》【年(卷),期】2013(036)001【总页数】3页(P131-133)【关键词】三相交流异步电动机;dsPIC30F6010;矢量法控制;光电编码器【作者】刘陆;杨丽英【作者单位】西安职业技术学院,陕西西安710032;大连日牵电机有限公司,辽宁大连 116036;大连日牵电机有限公司,辽宁大连 116036【正文语种】中文【中图分类】TN911.7-340 引言20世纪80年代开始,电力电子、计算机技术和自动控制理论发展,为交流电气传动产品的开发创造了条件,使得交流传动逐步具备了宽调速范围、高精度、快速动态响应及四象限运行良好的技术性能。

基于DSP的陀螺测控系统的设计
杨宇;李宏生;施峥嵘
【期刊名称】《仪器仪表用户》
【年(卷),期】2006(013)001
【摘要】本文以TI公司TMS320C32型DSP为核心处理器,设计了一种陀螺测控系统.在介绍了本系统硬件设计和软件设计基础上,重点讨论了该型号DSP外扩器件可变数据宽度的接口设计,Bootload的实现过程,读写EEPROM的改进软件设计以及数字滤波器的快速设计.本文设计的软件程序已在硬件成品基础上验证通过,效果良好.本文所讨论的设计方法对其他型号DSP在测控系统中的应用具有典型的参考作用.
【总页数】3页(P8-10)
【作者】杨宇;李宏生;施峥嵘
【作者单位】东南大学,仪器科学与工程系,南京,210096;东南大学,仪器科学与工程系,南京,210096;东南大学,仪器科学与工程系,南京,210096
【正文语种】中文
【中图分类】TP332
【相关文献】
1.基于DSP的静电悬浮转子微陀螺测控系统 [J], 刘凯;张卫平;陈文元;周海军;肖奇军;马高印;李凯
2.基于ARM的陀螺仪测控系统的设计与实现 [J], 孙丽萍;丁超;王永梁
3.基于ARM的陀螺仪测控系统的设计与实现 [J], 孙丽萍;丁超;王永梁
4.基于MPU6050的陀螺仪测控系统设计 [J], 叶俊明;马海琴
5.基于SID算法的MEMS陀螺仪测控系统设计 [J], 王亚林; 杨拥军; 任臣
因版权原因,仅展示原文概要,查看原文内容请购买。
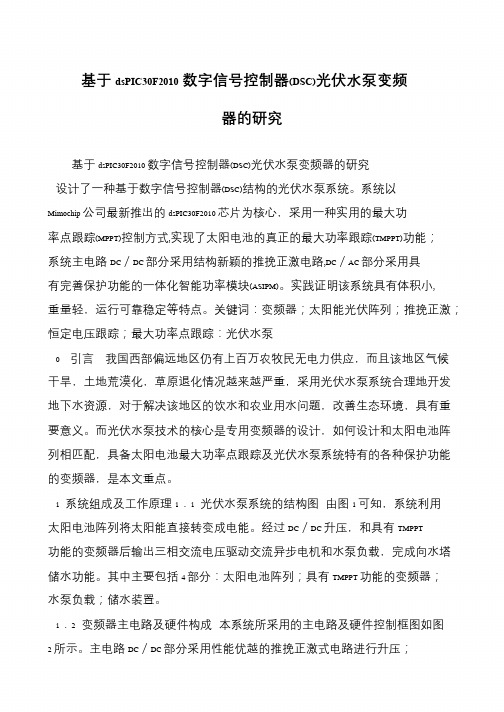
基于dsPIC30F2010数字信号控制器(DSC)光伏水泵变频器的研究基于dsPIC30F2010 数字信号控制器(DSC)光伏水泵变频器的研究设计了一种基于数字信号控制器(DSC)结构的光伏水泵系统。
系统以Mimochip 公司最新推出的dsPIC30F2010 芯片为核心,采用一种实用的最大功率点跟踪(MPPT)控制方式,实现了太阳电池的真正的最大功率跟踪(TMPPT)功能;系统主电路DC/DC 部分采用结构新颖的推挽正激电路,DC/AC 部分采用具有完善保护功能的一体化智能功率模块(ASIPM)。
实践证明该系统具有体积小,重量轻,运行可靠稳定等特点。
关键词:变频器;太阳能光伏阵列;推挽正激;恒定电压跟踪;最大功率点跟踪:光伏水泵0 引言我国西部偏远地区仍有上百万农牧民无电力供应,而且该地区气候干旱,土地荒漠化,草原退化情况越来越严重,采用光伏水泵系统合理地开发地下水资源,对于解决该地区的饮水和农业用水问题,改善生态环境,具有重要意义。
而光伏水泵技术的核心是专用变频器的设计,如何设计和太阳电池阵列相匹配,具备太阳电池最大功率点跟踪及光伏水泵系统特有的各种保护功能的变频器,是本文重点。
1 系统组成及工作原理1.1 光伏水泵系统的结构图由图1 可知,系统利用太阳电池阵列将太阳能直接转变成电能。
经过DC/DC 升压,和具有TMPPT功能的变频器后输出三相交流电压驱动交流异步电机和水泵负载,完成向水塔储水功能。
其中主要包括4 部分:太阳电池阵列;具有TMPPT 功能的变频器;水泵负载;储水装置。
1.2 变频器主电路及硬件构成本系统所采用的主电路及硬件控制框图如图2 所示。
主电路DC/DC 部分采用性能优越的推挽正激式电路进行升压;。

基于dsPIC30F的三相电压源型逆变器空间量调制方法于洋;张加胜
【期刊名称】《电测与仪表》
【年(卷),期】2011(048)009
【摘要】分析了空间矢量调制的原理,得出了相关的算法和结论;详细分析了开环控制方式下,采用dsPIC30F单片机实现三相电压源型逆变器空间矢量调制的方法及其优点,并简要分析了闭环控制的实现途径、主要问题以及相应的解决方法;最后,利用dsPIC30F单片机,针对开环控制方式,实现了三相电压源型逆变器空间矢量调制波形的输出,并给出了实验结果,验证了所用方法的正确性.
【总页数】4页(P26-29)
【作者】于洋;张加胜
【作者单位】中国石油大学(华东),信息与控制工程学院,山东东营257061;中国石油大学(华东),信息与控制工程学院,山东东营257061
【正文语种】中文
【中图分类】TM921
【相关文献】
1.基于abc坐标系空间矢量控制的三相四桥臂电压源型逆变器研究 [J], 吴睿;谢少军
2.基于开关函数的三相电压源型逆变器的新型仿真模型 [J], 武小梅;徐新;聂一雄
3.基于扇区细分六相电压源逆变器全调制范围的空间矢量脉宽调制方法 [J], 黄守道;赵礼;郑剑;赵云云
4.基于BP神经网络的三相电压源型逆变器开路故障诊断 [J], 韩素敏;周孟;郑书晴
5.基于SVPWM算法的三相电压源型高频链逆变器的研究 [J], 曾方
因版权原因,仅展示原文概要,查看原文内容请购买。

《基于dsPIC30F4011的无刷直流电机伺服驱动器设计》篇一一、引言随着现代工业自动化和智能化的发展,无刷直流电机伺服驱动器作为执行器的重要一环,在各类精密机械设备中得到了广泛的应用。
为了实现更高的控制精度和效率,采用高性能的微控制器(如dsPIC30F4011)成为一种必要选择。
本文将探讨基于dsPIC30F4011的无刷直流电机伺服驱动器的设计,并从系统设计、硬件实现和软件编程三个方面进行详细介绍。
二、系统设计在系统设计阶段,首先要确定无刷直流电机伺服驱动器的整体架构。
本设计采用以dsPIC30F4011为主控芯片的硬件架构,结合无刷直流电机的控制原理和特点,实现高效、精确的电机控制。
在硬件架构上,dsPIC30F4011微控制器负责接收上位机指令、处理电机控制算法、输出PWM信号等任务。
同时,系统还包括电源模块、电机驱动模块、传感器模块等部分,共同构成完整的伺服驱动器系统。
三、硬件实现1. 电源模块:电源模块为整个系统提供稳定的电源。
本设计采用开关电源和线性电源相结合的方式,以满足不同模块的电压需求。
2. 电机驱动模块:电机驱动模块是实现无刷直流电机运动的关键部分。
本设计采用三相全桥驱动电路,通过PWM信号控制电机的运动。
同时,为提高电机的性能和保护电机的安全,该模块还包括电流、电压和温度等检测电路。
3. 传感器模块:传感器模块用于实时检测电机的位置、速度和负载等信息,为控制算法提供数据支持。
本设计采用高精度的光电编码器和力矩传感器等设备,确保系统具有较高的动态响应和稳定性。
四、软件编程在软件编程方面,本设计采用C语言进行编程,以充分利用dsPIC30F4011微控制器的强大处理能力。
软件程序主要包括初始化程序、主程序和控制算法程序等部分。
初始化程序负责配置dsPIC30F4011的时钟、IO口、PWM等参数,为主程序和控制算法程序提供良好的运行环境。
主程序负责接收上位机指令、处理系统状态信息等任务,确保系统的正常运行。
《基于dsPIC30F4011的无刷直流电机伺服驱动器设计》篇一一、引言无刷直流电机(BLDC)作为一种高性能、高效率的电机类型,广泛应用于工业控制、伺服系统等领域。
而dsPIC30F4011微控制器因其卓越的数字信号处理能力及高性能特点,使其成为设计伺服驱动器的理想选择。
本文旨在介绍一种基于dsPIC30F4011的无刷直流电机伺服驱动器的设计方案。
二、系统架构与硬件设计(一)系统架构本设计以dsPIC30F4011为核心,辅以霍尔传感器、电源电路、驱动电路、散热模块等组成无刷直流电机伺服驱动器系统。
(二)硬件设计1. dsPIC30F4011微控制器:作为系统的核心,负责接收指令、处理数据并控制电机运行。
2. 霍尔传感器:用于检测电机转子的位置,为dsPIC30F4011提供电机转子的实时位置信息。
3. 电源电路:为系统提供稳定的电源,包括电机驱动电源和微控制器工作电源。
4. 驱动电路:根据dsPIC30F4011的指令,控制电机驱动器的开关,实现对电机的控制。
5. 散热模块:确保系统在长时间工作过程中保持稳定,防止因过热导致的系统故障。
三、软件设计与算法实现(一)软件设计本设计采用模块化设计思想,将软件分为初始化模块、控制算法模块、通信模块等。
初始化模块负责系统启动时的初始化设置;控制算法模块根据电机转子的位置信息及速度要求,计算电机的控制指令;通信模块负责与上位机的通信,接收上位机发送的指令。
(二)算法实现1. 转子位置检测算法:通过霍尔传感器检测电机转子的位置信息,为dsPIC30F4011提供精确的位置反馈。
2. 控制算法:采用先进的PID控制算法,根据电机转子的位置信息及速度要求,实时调整电机的控制指令,实现对电机的精确控制。
3. 通信协议:与上位机采用标准的串口通信协议进行通信,确保指令的准确传输。
四、性能测试与优化(一)性能测试本设计在完成硬件和软件设计后,进行了严格的性能测试。
基于dsPIC30F6014数字信号控制器的CAN节点设计杨旭东;韩雪晶;张超;商建锋
【期刊名称】《微计算机信息》
【年(卷),期】2006(022)029
【摘要】本文介绍了一种新型数字信号控制器dsPIC30F6014在CAN节点设计过程中的硬件和软件实现过程.该方案系统集成度高、硬件简单、工作可靠具有很好的推广价值.
【总页数】3页(P133-135)
【作者】杨旭东;韩雪晶;张超;商建锋
【作者单位】300130,河北工业大学电工厂;300130,河北工业大学电工厂;300130,河北工业大学;300130,河北工业大学电工厂
【正文语种】中文
【中图分类】TP336
【相关文献】
1.基于高性能数字信号控制器的油田注水系统设计 [J], 高建民;陈永军;丁福坤;胡恩涛;王锋;胡治海
2.基于数字信号控制器的电动车用开关磁阻电机控制系统设计 [J], 王建;程鹤;陈昊
3.基于数字信号控制器的单相光伏并网逆变电源设计 [J], 何成平
4.基于dsPIC30F6014数字信号控制器的CAN节点设计 [J], 杨旭东;韩雪晶;张超;商建锋
5.基于dsPIC30F6014的雷达物位计的设计 [J], 陈立华;刘进
因版权原因,仅展示原文概要,查看原文内容请购买。
基于dsPIC30F3011的飞轮电池控制系统设计王兴贵;何翼;孙晓静【期刊名称】《工矿自动化》【年(卷),期】2011(037)010【摘要】The paper proposed a design scheme of control system of flywheel battery based on dsPIC30F3011 according to charge-discharge process of flywheel battery. It gave structure and control principle of the system and introduced design of hardware and software of the system in details. The debugging result showed that the system fully makes use of high-speed calculating ability and rich chip peripheral resources of dsPIC30F3011, and makes flywheel battery not only has good steady characteristics but also higher dynamic quality in energy storage process.%根据飞轮电池充放电过程的特点,提出了一种基于dsPIC30F3011的飞轮电池控制系统的设计万案;给出了该系统的结构及控制原理,详细介绍了该系统的硬件及软件设计.调试结果表明,该系统充分利用了dsPIC30F3011的高速运算能力和丰富的片内外设资源,使得飞轮电池储能过程不仅具有良好的稳态特性,而且具有较高的动态品质.【总页数】5页(P8-12)【作者】王兴贵;何翼;孙晓静【作者单位】兰州理工大学电气工程与信息工程学院,甘肃兰州730050;甘肃省工业过程先进控制重点实验室,甘肃兰州730050;兰州理工大学电气工程与信息工程学院,甘肃兰州730050;兰州理工大学电气工程与信息工程学院,甘肃兰州730050【正文语种】中文【中图分类】TD605【相关文献】1.基于dsPIC30F3011的软起动控制系统 [J], 牛鑫;李虹飞2.电动汽车用飞轮电池充电控制系统设计 [J], 郭永吉3.基于开关磁阻电机的飞轮电池直流充放电控制 [J], 方永旺;方红伟;刘乙彤4.飞轮电池放电控制系统设计与试验研究 [J], 付雄新5.基于DSP的飞轮电池的管理系统设计 [J], 汤双清;高新意因版权原因,仅展示原文概要,查看原文内容请购买。