第三章 平面机构的运动
- 格式:ppt
- 大小:1.37 MB
- 文档页数:62



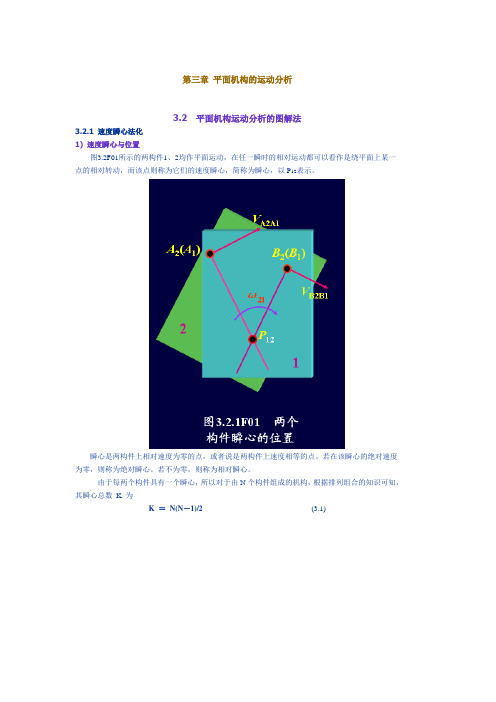
第三章平面机构的运动分析3.2平面机构运动分析的图解法3.2.1速度瞬心法化1) 速度瞬心与位置图3.2F01所示的两构件1、2均作平面运动,在任一瞬时的相对运动都可以看作是绕平面上某一点的相对转动,而该点则称为它们的速度瞬心,简称为瞬心,以P12表示。
瞬心是两构件上相对速度为零的点,或者说是两构件上速度相等的点。
若在该瞬心的绝对速度为零,则称为绝对瞬心。
若不为零,则称为相对瞬心。
由于每两个构件具有一个瞬心,所以对于由N个构件组成的机构,根据排列组合的知识可知,其瞬心总数K 为K =N(N-1)/2 (3.1)【点击链接转摆变换的平面六杆机构的二维动画】对于例图,瞬心数目K为K =6(6-1)/2=15 (3.1')(1) 通过运动副直接相连的两构件的瞬心位置(a) 以转动副相连的两构件,如图3.1(a)所示,其瞬心在转动副的中心上。
(b) 以移动副相连的两构件,如图3.1b 所示,由于在平面任一点处两构件相对运动的速度方向均平行于移动副导路,所以,P12一定位于无穷远。
(c) 以平面高副相连的两构件,如图3.1c 所示,若高副两元素之间为纯滚动(ω12为相对滚动的角速度),则两元素的接触点M即为瞬心P12。
(d) 若高副两元素间既有相对滚动,又有相对滑动(V12为相对滑动速度),则瞬心P12必定位于高副过接触点的公法线n-n上,如图3.1d 所示,具体位置需要根据其他条件来确定。
(2) 不直接通过运动副相连的两构件的瞬心位置不直接通过运动副相连接的两构件的瞬心位置由三心定理予以确定。
所谓三心定理是指三个彼此作平面相对运动的构件的三个瞬心必定位于同一直线上。
只有K在P12、P13的连线上,V K2与V K3才能方向相同,当位置合适, V K2与V K3大小一样,为此。
平面相对运动的构件的三个瞬心必定位于同一直线上。
2) 用速度瞬心作机构的速度分析(1) 铰链四杆机构如图 3.3 所示,比例尺为μL (单位为m/mm)的铰链四杆机构,若已知原动件1以角速度ω1顺时针方向回转,求从动件2、3的角速度ω2、ω3。

