基于CAN总线嵌入式汽车智能仪表设计
- 格式:doc
- 大小:25.00 KB
- 文档页数:6

摘要本设计致力于汽车CAN总线仪表系统的研究,深入讨论了系统的设计思想与实现方法,实现了在LabVIEW开发平台上建立基于CAN总线的虚拟仪表系统。
整个设计分为硬件系统和软件系统两部分。
其中硬件系统是以飞思卡尔公司的MC9S12XS128 作为微处理器的核心。
软件系统是利用C 语言编写程序实现两个CAN 节点之间的通讯以及利用LABVIEW编程实现单片机与虚拟仪表之间的通讯。
系统首先构建了一个由两个CAN节点组成的最简单的CAN网络。
对两个节点进行软件设计后,来实现相互之间的通讯和数据收发,同时在汽车的CAN 应用层协议基础上,上位机节点对接收的CAN报文进行处理,得到虚拟仪表各控件所对应的数据。
其中,基于LabVIEW的虚拟仪表系统开发和单片机的C语言编程是本设计的重点和难点。
关键词:CAN总线;汽车仪表;LabVIEW;C语言;单片机ABSTRACTThis paper researches automotive instrument based on CAN bus, deeply discusses the idea and the method of system design and brings forward the approach of design the automotive emulational virtual instrument system on the platform of LabVIEW software.The whole design of hardware system and software system is divided into two parts. One of the hardware system is the MC9S12XS128 as freescale's company core microprocessor. A software system is using written in C language program realization of the communication between two CAN node using G language preparation and MCU and virtual instrument LABVIEW realization of the communication between.To construct a system first composed by two CAN node of the most simple CAN network. Two nodes software design, to realize mutual communication and data transceiver, meanwhile in automobile CAN application-layer protocol basis, PC node to receive message processing, CAN get virtual instrument corresponding each control the data. Among them, the LabVIEW virtual instrument based on SCM system development and the C programming language is the design of the key and difficult.Key words: CAN Bus;Automotive Instrument;LabVIEW;C Language;SCM目录摘要 (Ⅰ)Abstract (Ⅱ)第1章绪论 (1)1.1课题研究的目的和意义 (1)1.2汽车仪表的发展 (2)1.3CAN总线技术推动汽车仪表的升级换代 (2)1.4研究的基本内容 (3)第2章CAN总线原理 (5)2.1汽车总线 (5)2.2CAN总线 (5)2.2.1 CAN总线简介 (5)2.2.2 CAN总线基本特点 (7)2.2.3 CAN总线通讯介质访问控制方式 (7)2.2.4 CAN总线的物理层设计 (8)2.2.5 CAN应用软件设计原则 (8)2.3汽车的其他总线 (8)2.3.1 LIN总线简介 (8)2.3.2 FLEXRAY总线简介 (9)2.3.3 MOST总线简介 (10)2.3.4汽车总线比较 (11)2.4汽车通讯协议 (11)2.4.1 SAE J1939通讯协议 (11)2.4.2 CAN总线协议 (12)2.5本章小结 (15)第3章汽车智能仪表系统的硬件设计 (16)3.1硬件系统的组成 (16)3.2微处理器的选择 (17)3.3微处理器的介绍 (17)3.4MSCAN总线模块 (18)3.5CAN总线节点的搭建 (21)3.6串行接口电路的设计 (22)3.7按键电路设计 (22)3.8电位计电路设计 (22)3.9本章小结 (24)第4章汽车智能仪表系统的软件设计 (25)4.1LABVIEW简介 (25)4.2下位机主程序流程图 (28)4.3上位机流程图 (29)4.4按键中断函数流程图 (29)4.5CAN总线程序 (30)4.6本章小结 (44)第5章系统测试 (45)5.1整体概述 (45)5.2测试 (46)5.3本章小结 (53)结论 (54)参考文献 (55)致谢 (56)附录A 英文原文 (57)附录B 英文翻译 (64)第1章绪论1.1课题研究的目的和意义传统的汽车仪表只能为驾驶员提供汽车运行中必要而又少量的数据信息。
基于CAN总线的纯液晶汽车仪表的设计摘要:由于新能源汽车仪表显示内容的独特性,传统汽车仪表的设计并不能完全适应新能源汽车的要求,本文介绍了一种基于CAN总线的纯液晶汽车仪表的设计。
该仪表以CAN总线为基础,通过微处理器进行数据采集、分析和处理,实现了仪表基本功能、动力驱动系统显示、动力能源系统参数显示以及相关系统故障信息报警等功能。
仪表界面的快捷设计,为实现仪表界面显示的丰富多彩提供了方便。
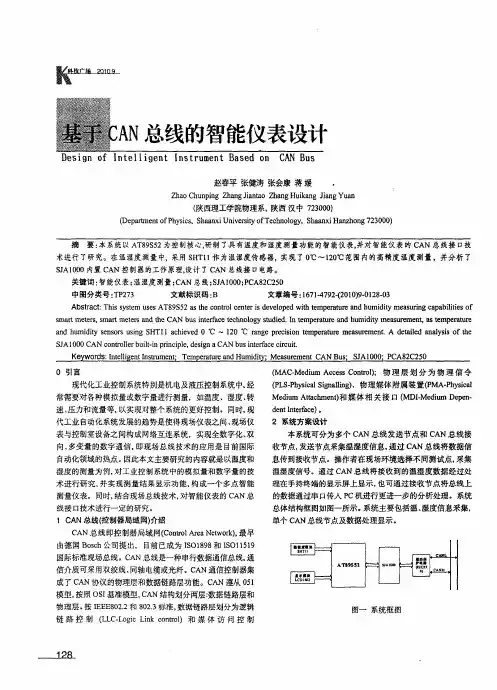
关键词:仪表;CAN;微处理器;通讯协议Abstract:As new energy automotive instrument display content uniquely,traditional car dashboard design can’t fully meet new energy vehicles requirement. The paper introduces a pure liquid crystal automotive instrument design based on CAN bus. This instrument with CAN bus conducts data acquisition,analysis and processing by a microprocessor,aims to achieve basic functions of instrument,power drive systems,power-energy systems and associated parameter display system fault message alarm. Fast designed instrument interface realize colorful instrument display to provide convenient interface.Key words:Meter;CAN;Microprocessor;Communication protocol0引言随着汽车技术的发展,人们对汽车要求也越来越高,特别是对仪表显示的直观和美观要求更高。
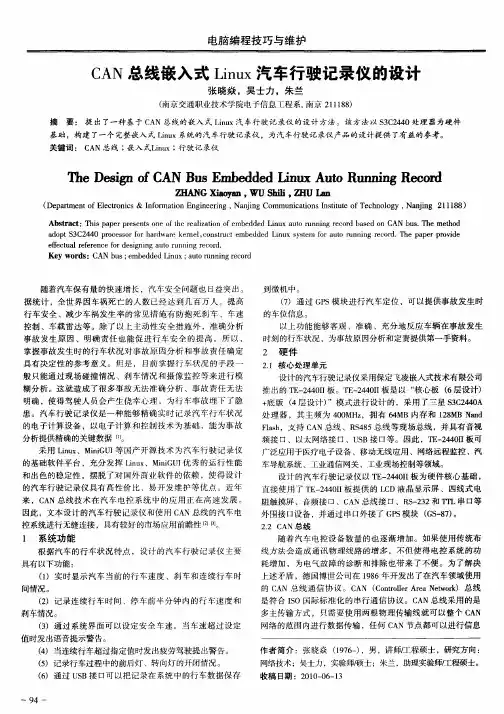
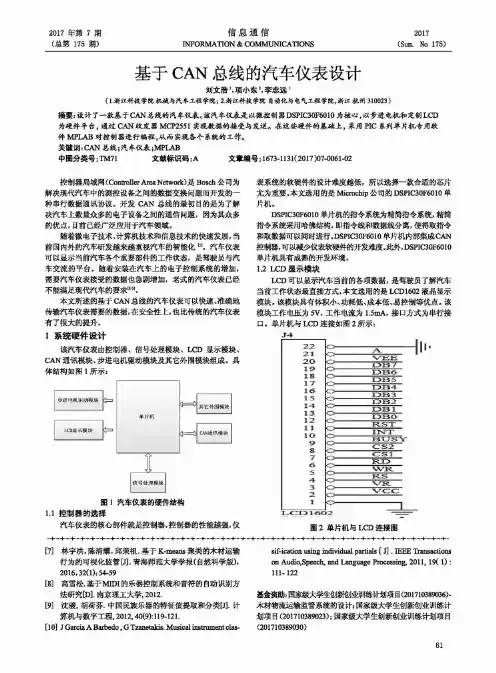
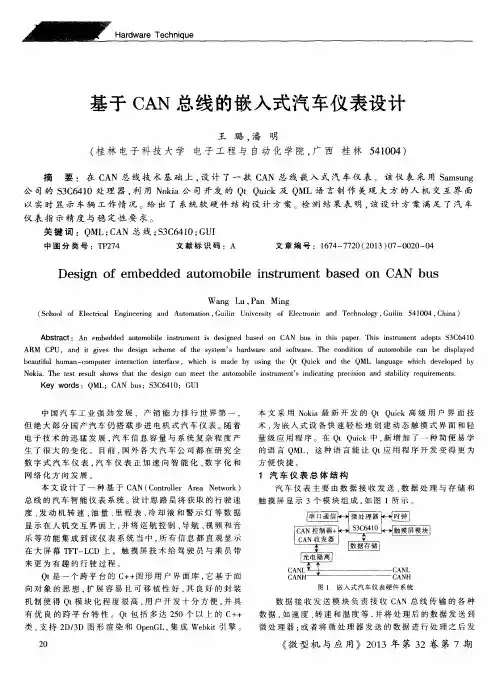
2017年第7期 信息通信2017(总第 175 期) INFORMATION & COMMUNICATIONS (S u m . N o 175)基于C A N 总线的汽车仪表设计刘文浩S 项小东2,李志远1(1.浙江科技学院机械与汽车工程学院;2.浙江科技学院自动化与电气工程学院,浙江杭州310023)摘要:设计了一款基于C A N 总线的汽车仪表。
该汽车仪表是以微控制器D SH C 30F 6010为核心,以步进电机和定制LCD 为硬件平台,通过C A N 收发器MCP 2551实现数据的接受与发送。
在这些硬件的基減上,采用P I C 系列单片机专用软 件M P L A B 对控制器进行编程,从而实现各个系统的工作。
关键词:C A N 总线;汽车仪表;MPLAB 中图分类号:TM 71文献标识码:A文章编号:1673-1131(2017)07-0061-02控制器局域网(Controller Area Network )是B osch 公司为 解决现代汽车中的测控设备之间的数据交换问题而开发的一 种串行数据通讯协议。
开发C A N 总线的最初目的是为了解 决汽车上数量众多的电子设备之间的通信问题,因为其众多 的优点,目前已经广泛应用于汽车领域。
随着微电子技术、计算机技术和信息技术的快速发展,当 前国内外的汽车研发越来越重视汽车的智能化w 。
汽车仪表 可以显示当前汽车各个重要部件的工作状态,是驾驶员与汽 车交流的平台。
随着安装在汽车上的电子控制系统的増加, 需要汽车仪表接受的数据也急剧増加,老式的汽车仪表已经 不能满足现代汽车的要求%。
本文所述的基于C A N 总线的汽车仪表可以快速、准确地 传输汽车仪表需要的数据,在安全性上,也比传统的汽车仪表 有了很大的提升。
表系统的软硬件的设计难度越低,所以选择一款合适的芯片 尤为重要。
本文选用的是Microchip 公司的DSPIC 30F 6010单 片机。
基于CAN总线的汽车LCD智能仪表研究与开发的开题报告一、课题背景和研究意义随着社会和技术的发展,汽车已经成为了人们生活中不可或缺的交通工具。
而随着汽车的发展,车内的智能化程度也不断提高。
智能仪表是汽车的重要组成部分,其能够实时显示车辆的运行状态、故障信息、路线导航等,并且具有自动调节亮度和显示符号等功能。
因此,智能仪表对于汽车行驶和保养的实时监测有着重要的意义。
目前,智能仪表技术已经得到广泛的应用。
而基于CAN总线的智能仪表能够更好地实现对车辆的数据监控、控制和通信,因此正在得到越来越多的关注和应用。
这种仪表还具有灵活的配置、容易扩展和可靠性高等优点,能够更好地满足不同车型和用户的需求。
因此,本研究拟对基于CAN总线的汽车LCD智能仪表进行研究和开发,以满足现代汽车工业对智能化仪表的需求,为提升汽车行驶的安全性、可靠性和舒适性做出贡献。
二、研究内容和研究方法本研究的主要内容是基于CAN总线的汽车LCD智能仪表的研究和开发。
其具体包括如下几个方面:(1)CAN总线协议的研究和分析,包括CAN总线通信协议、帧格式、传输速率等方面的内容;(2)汽车LCD智能仪表的设计和开发,包括硬件电路设计、软件编程设计、图形界面设计等方面的内容;(3)汽车LCD智能仪表的测试和优化,包括测试样机制作、测试环境搭建、性能测试、功能测试等方面的内容。
本研究的研究方法主要是基于理论与实践相结合的研究方法。
具体包括如下几个环节:(1)CAN总线协议理论知识的学习和研究,包括CAN总线通信协议、帧格式、传输速率等;(2)汽车LCD智能仪表硬件电路设计和软件编程设计,包括PCB设计、代码编写和图形界面设计等;(3)样机测试和性能优化,包括制作测试样机、设计测试环境、进行性能和功能测试等。
三、预期研究成果本研究的预期研究成果主要包括如下几个方面:(1)CAN总线协议的深入了解和掌握,能够利用CAN总线实现汽车的数据通信和控制;(2)基于CAN总线的汽车LCD智能仪表的设计和开发,能够满足汽车行驶和保养的实时监测需求;(3)测试样机的制作和测试环境的设计,能够实现性能和功能测试;(4)性能和功能测试结果的分析和总结,能够对研究成果进行评价和改进。
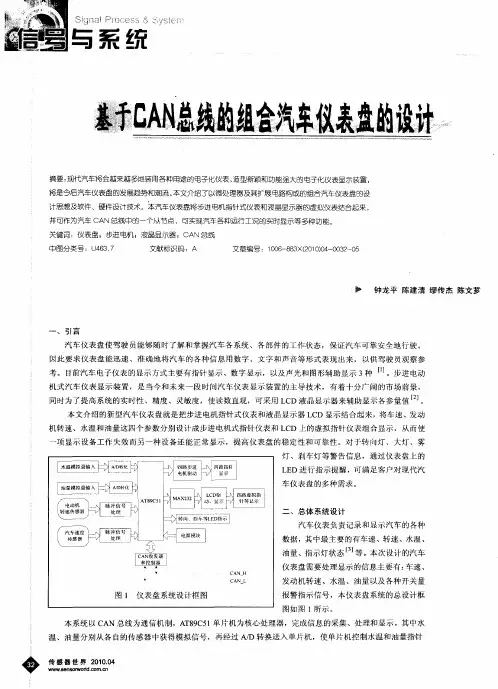
摘要课题所设计的内容是一种基于现场总线(CAN总线)的汽车智能仪表系统,系统能够精确的测量模拟装置产生的汽车发动机转速、车速、燃油量、冷却液温度等参数。
并且能够通过显示控件显示所有测量的参数,提高了人机交互性。
文中对汽车智能仪表系统的结构和工作原理做了详细的阐述,对信号模拟装置的选择和显示形式的选择方案分别作了比较。
文中从整体上阐述了CAN总线汽车组合仪表的设计开发方法,分别从CAN理论及协议、仪表硬件设计和软件编程三个方面全面论述了开发CAN总线汽车仪表所要解决的问题及解决方案。
在硬件上完成了基于MC9 S12DG128B单片机的仪表电路设计,在软件上开发了CAN总线收发程序,完成了对步进电机、伺服电机、LCD液晶显示屏等仪表关键器件的控制,并实现了对CAN总线仪表的远程控制。
利用自行设计的信号模拟装置完成了验证试验,经过实际运行和测试表明,CAN 总线汽车仪表在显示的实时性、准确性以及可靠性等方面都优于传统的电气仪表。
关键词:CAN总线;汽车智能仪表;单片机;步进电机ABSTRACTDesigned by the subject content is based on the fieldbus (CAN bus) vehicle intelligent instrument system,precise measurement can have a car simulator engine speed,speed,fuel quantity,coolant temperature and other parameters. And to the parameters measured displayed through the display control to improve the human computer interaction.The design of intelligent instrumentation system for vehicle structure and working principle elaborated on the choice of signal simulator and display the form of options were compared,respectively. This article described a whole combination of CAN Bus vehicle instrumentation design and development methods,theory and from the CAN agreement, instrument hardware design and software programming on three aspects of the comprehensive development of the CAN bus automotive instrument to solve the problems and solutions and the completion of the verification test.Papers completed in the hardware of the instrument based on single chip MC9S12DG128B circuit design,software development in a CAN bus transceiver procedures,completed a stepper motor,servo motor,LCD liquid crystal display devices,such as the key instrument of control,and to achieve CAN bus of the remote control of instrumentation.Actual operation and tests have shown that,CAN bus in automotive dashboard displays real.time,accuracy and reliability are superior to traditional mechanical core instruments, the future development trend of automobile instrument.Key words: CAN Bus;Automotive Intelligent Interactive;Single Chip;Stepping Motor目录摘要 (I)ABSTRACT (II)第1章绪论 (1)1.1课题研究的目的和意义 (1)1.2汽车电子技术的发展 (1)1.3汽车仪表技术的发展 (3)1.4汽车仪表的发展趋势 (5)1.4.1汽车仪表电子化 (5)1.4.2采用高级显示器 (5)1.4.3电光学技术的应用 (5)1.4.4 CAN总线技术的应用 (6)1.4.5未来汽车仪表发展趋势 (6)1.5研究的基本内容和拟解决的主要问题 (7)1.5.1研究的基本内容 (7)1.5.2拟解决的主要问题 (7)第2章汽车智能仪表基础知识及CAN协议规范 (8)2.1汽车智能仪表系统简介 (8)2.2仪表背景灯的发光原理 (8)2.3仪表显示器件及其驱动方法 (9)2.3.1液晶的各种技术参数 (9)2.3.2液晶显示器的基本原理 (11)2.3.3液晶显示的驱动方法 (11)2.4步进电动机的驱动方式 (13)2.4.2步进电动机的工作原理 (14)2.4.3步进电动机的振荡和失步 (15)2.5伺服电机的驱动方式 (15)2.6CAN总线技术 (16)2.6.1汽车应用多路传输技术的背景 (16)2.6.2 CAN总线协议 (17)2.7本章小结 (20)第3章汽车智能仪表系统的硬件设计 (21)3.1汽车仪表主芯片的选择 (21)3.1.1 MC9S12DG128B芯片概述 (21)3.1.2 CAN总线模块 (23)3.1.3 A/D转换模块 (26)3.1.4脉宽调制模块(PWM) (27)3.3CAN总线模块电路设计 ........................................................... 错误!未定义书签。
基于CAN总线的嵌入式汽车智能仪表的设计
【摘要】本文设计了一个完整的基于can总线技术的嵌入式汽车智能仪表,它包括了一般汽车智能仪表的功能,并在此基础上增加了驾驶员身份验证、gps卫星定位、全程行驶记录功能、显示打印功能、数据通讯功能等,采用一主多从的控制系统方案,各个功能有相应的模块进行完成,采用can总线通讯,各模块的数据传输通过can总线和主控制器进行数据交流,并最终完成了系统的安装调试。
汽车智能仪表,可以称作“汽车黑匣子”,是一种能对车辆行驶全过程同步记录、监控运行状态、预防交通事故发生的高新技术产品,它可详细记录车辆每次的起动时间、行驶里程、行驶时间、最高车速以及每次最高车速的持续时间,在汽车驾驶员超速行驶时发出超速报警声,储存车辆信息,具有gsm/gprs远程数据传输、gps定位等功能。
采用can总线可以使系统达到更高的指标,同时can总线已发展成为汽车电子系统的主流总线。
本文设计的嵌入式can总线汽车智能仪表采用一主多从的控制系统方案,各个功能有相应的模块进行完成,采用can总线通讯,各模块的数据传输通过can总线和主控制器进行数据交流。
1.系统硬件的总体构成
本系统中总体构成包括数据中心处理模块cpu、速度采集模块、语音报警模块、距离测量模块、gsm远程监控模块、液晶显示模块、指纹识别模块、数据采集模块、gps模块、开关量输入、usb接口
及光电隔离电路等组成。
2.系统主模块中单元电路设计
该系统大体可以分为以下单元:速度采集单元、指纹信号处理单元、gps卫星定位信号处理单元、液晶显示单元、语音报警单元、信号采集单元、打印单元、电源单元、中心处理单元。
2.1速度采集单元
速度采集模块cpu选择台湾华邦公司生产的8位单片机w77e58, 它内部集成了32kb的可重复编程的flash rom、256字节的片内存储器、1kb用于movx指令访问的sram、可编程看门狗定时器、三个16位定时器、二个增强型的全双工串行口、片内rc振荡器、双16位数据指针等诸多功能。
整个模块在晶振的驱动下运行,w77e58通过rs232串口采集车轮实际半径,通过光耦隔离模块采集速度信号,计算出实际的车速,在经过can总线传送给中心模块,看门狗的作用是在w77e58程序跑死的情况下对其复位,保证系统正常运行。
2.2指纹识别信号处理单元
指纹识别模块cpu选择台湾华邦公司生产的8位单片机w77e58。
整个模块在晶振的驱动下运行,w77e58通过采集指纹识别机的记录来确定驾驶员的输入指纹时间,并通过can总线通知中心模块驾驶员信息,中心模块在接收到驾驶员信息后打开汽车启动控制器,驾驶员才能安全的启动汽车。
2.3 gps卫星定位信号处理单元
在进行gps模块设计时直接选用其它公司的gps成品,用以减少开发周期,gps接收器和中心模块进行通讯,把相应的数据传输给中心模块,有中心模块进行相应的操作,通过液晶显示,通知驾驶员所在的地理位置以及方向等。
2.4液晶显示单元
液晶显示模块结构cpu选择8位upsd3234a单片机芯片,它内部集成了256kb的可重复编程的flash rom、8kb字节的片内存储器、可编程看门狗定时器、三个16位定时器、两个增强型的全双工串行口、一个a/d中断口等诸多功能。
该模块由12mhz晶振驱动,汉字自摸存储在upsd3234a中,在接收到中心处理模块数据时进行显示相应信息,驾驶员通过显示信息,可以了解汽车的状态,以便进行相应的操作。
2.5语音报警单元
语音报警模块芯片选择isd4004,isd4004单片可播放8-16分钟、内置微控制器串行通信接口、10 万次录音周期、不耗电信息保存100 年等功能。
该模块首先是把要播放的语音内容通过烧片机及语音录制进语
音芯片,模块cpu在接受中心模块的数据后进行相应的语音播报,用以提醒驾驶员汽车可能出现的故障。
2.6电源单元
本单元是整个系统的能量单元,该模块的稳定性直接影响到整个系统的稳定性,而且不同的汽车内部所提供的电压不是同一的值,
电压也不是稳定的值,因此该模块在设计时选用了linear 公司的ltm4609,ltm4609是98%高效率的升降压开关电源,集成了开关控制器,功率fet和支持元件。
输入电压从4.5v到36v,输出电压从0.8v到34v。
升压模式可提供4a电流,而降压模式则可提供10a 电流,效率高达98%。
可锁相的固定频率从200khz 到 400khz,具有超快的瞬态响应特性,输入经过ltm4609处理后在经过电源滤波器进行处理,是电源噪声降到最低,把得到的稳定电压经过
lm2596s-5.0稳压后得到五伏特的电压,由于中有很多芯片是工作在3.3v或1.8v的电压下,因此通过lm1117-1.8、lm1117-3.3的到系统的工作电压。
2.7中央处理单元
中央处理单元是本系统中最主要也是最繁忙的模块,本单元用lpc2119作为主控芯片,利用本身所带的a/d转换模块来测量相应的模拟量,通过i/o口来控制数据的存储和读取相应的开关量(其中数据存储采用nor型 flash存储器sst39vf1601),通过串行通讯和外部的打印机相连输出相关数据,同时模块中提供了usb输出接口,对于其它功能模块采用can通讯的方式进行数据通讯。
3.系统软件设计
系统软件主要完成两方面的功能:(1)实现汽车行驶状态的实时检测和记录,检测到故障时报警。
(2)将记录数据通过rs232口上传到上位机,以便进行日常管理和事故诊断。
由于本项目设计采用的是模块和功能相结合的方式,所以在设计
系统软件时也要考虑系统各模块的独立性。
系统上电后各模块初始化,主控制器自检开始,通过液晶显示出相应的状态,主控制器读取各模块数据进行分析处理,保存数据,主控制器检测各个开关量的状态,进行相应的操作,定时读取gps数据,进行方向指示,在主控制器检测到故障时进行语音报警和远程报警。
软件的设计完全按照结构化的程序设计方案,将整个程序按照功能分为若干个程序模块,以方便调试和检查。
采用c语言编程。
本设计中的软件在keilμvision3集成环境中编辑、编译、连接、调试后,直接通过串口将程序下载到相应的芯片中。
程序主要包括:主程序、模拟量采集程序、开关量采集程序、脉冲量采集程序、数据存储程序、时钟处理程序、故障处理程序、语音报警程序及串口通信程序等。
本文设计了一个完整的基于can总线技术的嵌入式汽车智能仪表,它包括了一般汽车智能仪表的功能,并在此基础上增加了驾驶员身份验证、gps卫星定位、全程行驶记录功能、显示打印功能、数据通讯功能等,并最终完成了系统的安装调试。
【参考文献】
[1]申荣卫.汽车电子技术.北京:机械工业出版社,2006.[2]许德章.现代汽车仪表技术与发展趋势.汽车电器,2002,(5),p1.4.
[3]纪常伟,杜振财等.汽车智能数字仪表的开发.北京工业大学学报,2006,v32,(4):352.355.
[4]张永良.基于can总线的车载信息系统的设计.武汉理工大学硕士学位论文,2006.
[5]广州周立功单片机发展有限公司
lpc2119/2129/2194/2292/2294 使用指南.。