2017年全国大学生电子设计竞赛设计报告
- 格式:doc
- 大小:802.50 KB
- 文档页数:13


电子设计大赛设计与总结报告我参加了一场电子设计大赛,本报告将对我设计的项目及整个比赛过程进行详细的描述和总结。
1.项目概述我的设计项目是一个智能家居系统。
该系统利用传感器和控制器来检测和控制家庭各种设备,使得居民可以通过手机、电脑等终端控制灯光、温度、门锁等设备,实现家居自动化管理。
2.设计过程a)设计需求分析在项目开始之前,我首先和团队成员进行了需求分析,明确了设计目标和用户需求。
我们进行了一系列讨论,包括用户对智能家居的期望、功能需求和技术实现等。
通过这些分析,我们确定了整体设计方案。
b)硬件设计在硬件设计方面,我们选择了一款适合我们需求的控制器和传感器,并设计了相应的电路板,以便将传感器与控制器连接起来。
我们还设计了用于用户交互的界面,使得用户可以通过终端设备远程控制家居设备。
c)软件开发在软件开发方面,我们使用了嵌入式开发平台进行应用程序编写。
我们根据硬件设计的要求编写了相应的控制程序,并实现了用户交互界面的设计。
我们还对整个系统进行了测试和优化,以确保系统的稳定和可靠性。
3.比赛过程a)准备阶段在比赛开始之前,我和团队成员充分准备。
我们进行了反复的测试和调试,确保我们的设计符合比赛要求,并且能够在比赛中正常工作。
b)比赛演示比赛开始后,我们向评委展示了我们的设计成果,并演示了系统的功能和性能。
我们向评委详细介绍了我们的设计思路、技术实现和创新点,并回答了评委的问题。
c)结果评定在比赛结束后,评委对每个项目进行评定。
我们的项目获得了较高的评分,并获得了优秀设计奖。
评委对我们的设计和实现给予了肯定,并提出了一些建设性的意见和建议。
4.总结与反思通过这次比赛,我学到了很多知识和经验。
首先,我学会了团队合作和沟通能力,通过与团队成员的合作,我们能够更好地完成任务。
其次,我学会了如何进行需求分析和项目规划,这对于项目的顺利进行非常重要。
此外,我也发现了自己在设计思路和创新能力方面的不足,并得到了评委的建议。
全国大学生电子设计竞赛工作总结报告各位代表,大家好!下面我代表全国大学生电子设计竞赛组织委员会,做工作总结报告。
一、全国大学生电子设计竞赛十年来的基本情况全国大学生电子设计竞赛是教育部和前电子工业部于1994年共同倡导主办的面向大学生的群众性科技活动,全国先后举办了六届竞赛。
这项竞赛的目的在于推动普通高等学校的信息电子类学科面向21世纪的教案内容和课程体系改革,尤其突出实践教案体系与内容的改革和实验室建设。
该项竞赛既重视第一课堂的教案改革,也重视课外第二课堂的教案改革;既重视学生智力的提高,也重视学生非智力素质的提高。
引导高等学校教师在教案中培养大学生的创新意识、团结协作精神和理论联系实际的学风,加强学生工程实践能力的训练和培养,鼓励广大学生踊跃参加课外科技活动,推动高等学校形成良好的学习风气,从而有力地推动了高等工程教育教案改革,提高了人才培养质量,同时也为优秀人才脱颖而出创造条件。
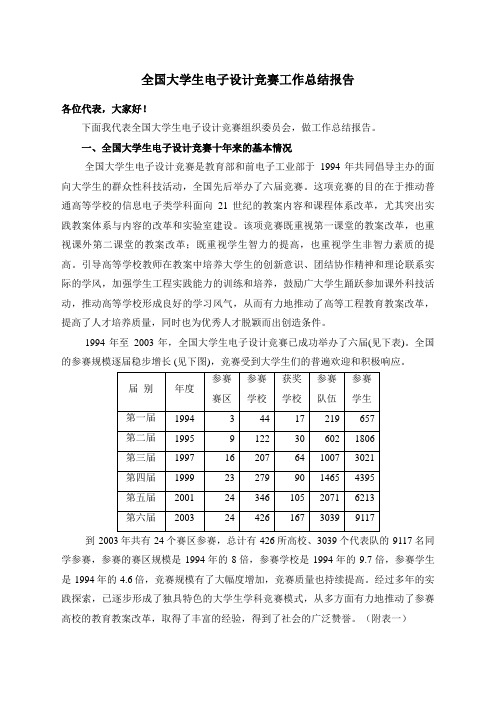
1994年至2003年,全国大学生电子设计竞赛已成功举办了六届(见下表)。
全国的参赛规模逐届稳步增长 (见下图),竞赛受到大学生们的普遍欢迎和积极响应。
到2003年共有24个赛区参赛,总计有426所高校、3039个代表队的9117名同学参赛,参赛的赛区规模是1994年的8倍,参赛学校是1994年的9.7倍,参赛学生是1994年的4.6倍,竞赛规模有了大幅度增加,竞赛质量也持续提高。
经过多年的实践探索,已逐步形成了独具特色的大学生学科竞赛模式,从多方面有力地推动了参赛高校的教育教案改革,取得了丰富的经验,得到了社会的广泛赞誉。
(附表一)表格 1全国大学生电子设计竞赛经过十年来的努力和不断的实践,从一个侧面探索出了以大学生学科竞赛为实践载体,有效促进教案改革的一种实践模式,并已逐步形成了符合国情的“政府主办、专家主导、学生主体、社会参与”的竞赛组织运行模式,为今后开展其他类型的大学生学科竞赛提供了可借鉴的运行模式,也为有战略发展眼光的企业开展助学活动提供了可借鉴的成功范例。


全国大学生电子设计竞赛设计报告模板(最新)————————————————————————————————作者:————————————————————————————————日期:2017年全国大学生电子设计竞赛XXX控制系统(A/B/C题)2017年8月12日摘要(小四、宋体,300字以内)关键词:脉宽;脉冲;数显;电容(小四、宋体)XXX控制系统(A/B/C题)【本科组】一、系统方案本系统主要由单片机控制模块、XXX模块、XXX模块、电源模块组成,下面分别论证这几个模块的选择。
1、主控制器件的论证与选择1.1.1控制器选用单片机比较方案一:采用传统的51系列单片机。
XXXXXX.方案二:采用以增强型80C51内核的STC系列单片机XXXXXX通过比较,我们选择方案二。
1.1.2控制系统方案选择方案一:采用在面包板上搭建简易单片机系统在面包板上搭建单片机系统可以方便的对硬件做随时修改,也易于搭建,但是系统连线较多,不仅相互干扰,使电路杂乱无章,而且系统可靠性低,不适合本系统使用。
方案二:自制单片机印刷电路板自制印刷电路实现较为困难,实现周期长,此外也会花费较多的时间,影响整体设计进程。
不宜采用该方案。
方案三:采用单片机最小系统。
单片机最小系统包含了显示、矩阵键盘、A/D、D/A等模块,能明显减少外围电路的设计,降低系统设计的难度,非常适合本系统的设计。
综合以上三种方案,选择方案三。
2、XXXX的论证与选择方案一:XXX。
XXXX方案二:XXX。
XXXX方案三:XXX。
XXXX综合以上三种方案,选择方案三。
3、控制系统的论证与选择方案一:XXX。
XXXX方案二:XXX。
XXXX综合考虑采用XXXXX。
二、系统理论分析与计算1、XXXX的分析(1)XXXXXXX(2)XXXXXXX(3)XXXXXXX2、XXXX的计算(1)XXXXXXX(2)XXXXXXX(3)XXXXXXX3、XXXX的计算(1)XXXXXXX(2)XXXXXXX(3)XXXXXXX三、电路与程序设计1、电路的设计(1)系统总体框图系统总体框图如图X所示,XXXXXX图X 系统总体框图(2)XXXX子系统框图与电路原理图1、XXXX子系统框图图X XXXX子系统框图2、XXXXX子系统电路图X XXXX子系统电路(3)XXXX子系统框图与电路原理图1、XXXX子系统框图图X XXXX子系统框图2、XXXXX子系统电路图X XXXX子系统电路(4)电源电源由变压部分、滤波部分、稳压部分组成。

设计总结报告的撰写设计总结报告是对学生设计能力和理论水平的体现。
通过写报告,不仅把设计、组装、调试的内容进行全面总结,而且把实践内容上升到理论高度。
根据表3所示设计总结报告参考评分标准,报告的参考模板及内容要求如后面几页。
设计题目(黑体三号)摘要(黑体四号)400字以内的设计摘要。
(宋体五号,左右缩进2字符,首行缩进2字符)关键词(若有)(黑体四号)3~5个关键词,中间用空格隔开。
(宋体五号,左右缩进2字符)Abstract(Times New Roman四号)英文设计摘要。
(Times New Roman五号,左右缩进2字符,首行缩进2字符)Key Words(若有)(Times New Roman四号)英文关键词,中间用分号隔开。
(Times New Roman五号,左右缩进2字符)页面设置:A4纸,上边距1厘米,下、左、右边距均为2厘米,装订线2厘米;页眉0.9厘米,页脚1.5厘米;装订线位置:顶端注意事项:1英文和数字使用Times New Roman字体2希腊字母用插入字符中的symbol字体,如3斜体和上、下标等应当尽量用字体格式实现,而不要用在行中插入公式的方法实现4图名应当在图的下边,表头在表格的上边,二者均应与对应的图表在同一页上设计题目(黑体三号)引言(黑体四号,段前、段后间距均为0.5行,可省略此行)简述设计内容及要求。
要归纳整理,不要将原题拷贝。
(宋体五号,1.1倍行距,首行缩进2字符)1 系统方案论证尽量进行必要的理论分析与计算。
1.1 总体方案论证(黑体小四号,段前、段后间距均为0.25行)比较和选定设计的系统总体方案。
1.2 软硬件模块论证比较和选定各单元(包括硬件电路和软件算法)。
1.3 选定的系统方案根据选定的电路模块画出系统框图。
2 硬件单元电路设计单元电路设计、参数计算和元器件选择;根据各单元电路的电路图说明各部分工作原理。
硬件电路模块一般包括:CPU及其外围电路指令输入电路显示输出电路功率驱动电路输入缓冲电路3 软件设计(若有)说明使用的语言和编程环境,分析各软件模块的设计。
2017年全国大学生电子设计竞赛试题设计报告四旋翼自主飞行器探测跟踪系统(C题)【本科组】廖聪,吴雨航,张锦华摘要:根据四旋翼飞行器飞行原理,首先根据设计方案采购了飞行器机体模型,选择合适的直流无刷电机作为系统动力装置,选取了功能强大且容易开发的微处理器、传感器和相关电子元器件,并做了大量的系统软硬件调试工作,最终完成了整体设计。
根据系统动力学模型设计控制算法,设计控制系统控制规律,主要包括两个控制回路姿态控制回路、位置控制回路。
在仿真软件平台上,进行控制算法验证及实验研究,优化飞行控制算法参数。
最后,设计实时性高的控制系统软件程序,进行相关实验调试工作,最终设计出能够实现一键飞行探测跟踪的四旋翼自主飞行器。
关键词:ATMEGA2560 瑞萨R5F523T5ADFM MPU6000陀螺仪超声传感器一、系统方案根据设计任务的要求,本系统包括飞行控制模块、驱动模块、飞行导航模块、测距模块等。
1、飞行控制模块的选择飞行控制模块是四旋翼自主飞行器的核心。
按照题目要求,飞行控制模块由ATMEGA2560处理器的开发板专门实现飞行控制算法。
为了实现自主飞行探测跟踪,必须要形成控制的闭环回路,必须要有检测和反馈系统状态的传感器,包括四旋翼的姿态、经纬度、航向、高度、空速、角速率等信号。
目前看来,国内外普遍应用MEMS器件来获取姿态、高度、空速、经纬度等信息。
此外这中间还需要有A/D采样电路、信号调理电路对采集的电信号进行必要的转换和简单的滤波。
针对四旋翼飞行器,控制方法有PID控制、反步法、滑模控制等飞行控制算法,我们采用经典的PID控制算法。
2、驱动模块的选择方案一:采用普通直流电机。
普通直流电机有价格低廉、使用简单等优点,但其扭矩较小,可控性差,此系统要求控制精度高、速度快、且质量要小,所以直流电机一般不能满足要求。
方案二:采用无刷直流电机,其具有响应速度快、较大的启动转矩,从零转速至额定转速具备可提供定转矩的性能。
2017年全国大学生电子设计竞赛简易水情检测系统(P题)2017年8月12日摘要本设计的是简易水情检测系统以STC89C52芯片为核心,辅以相关的外围电路,设计了以单片机为核心的水情检测系统。
系统主要由5V电源供电。
在硬件电路上在,用总线连接PH值传感器和水位传感器,通过传感器收集到的水情数据发送到单片机,单片机存储实时数据,并显示在12864LCD液晶屏上。
在软件方面,采用C语言编程。
通过对单片机程序设计实现对水情检测系统的水情数据的采集、显示和检测。
关键词:单片机最小系统;PH值传感器;水位传感器;AD模块AbstractThe design is a simple water regime detection system to STC89C52 chip as the core, supplemented by the relevant external circuit, designed to single-chip as the core of the water regime detection system. The system is powered by 5V power supply. In the hardware circuit, with the bus connection PH sensor and water level sensor, through the sensor to collect the water data sent to the microcontroller, single-chip storage of real-time data, and displayed on the 12864LCD LCD screen. In software, the use of C language programming. Through the single-chip program design to achieve the water regime detection system of water data collection, display and detection.Key words:single chip minimum system; PH value sensor; water level sensor; capacitance简易水情检测系统(P题)【专科组】一、系统方案本系统主要由单片机STC89C52模块、LCD显示模块、PCF8591电压转换模块、电源模块、水位检测模块、PH值检测模块组成,下面分别论证这几个模块的选择。
2017年全国大学生电子设计竞赛试题设计报告四旋翼自主飞行器探测跟踪系统(C题)【本科组】廖聪,吴雨航,张锦华摘要:根据四旋翼飞行器飞行原理,首先根据设计方案采购了飞行器机体模型,选择合适的直流无刷电机作为系统动力装置,选取了功能强大且容易开发的微处理器、传感器和相关电子元器件,并做了大量的系统软硬件调试工作,最终完成了整体设计。
根据系统动力学模型设计控制算法,设计控制系统控制规律,主要包括两个控制回路姿态控制回路、位置控制回路。
在仿真软件平台上,进行控制算法验证及实验研究,优化飞行控制算法参数。
最后,设计实时性高的控制系统软件程序,进行相关实验调试工作,最终设计出能够实现一键飞行探测跟踪的四旋翼自主飞行器。
关键词:ATMEGA2560 瑞萨R5F523T5ADFM MPU6000陀螺仪超声传感器一、系统方案根据设计任务的要求,本系统包括飞行控制模块、驱动模块、飞行导航模块、测距模块等。
1、飞行控制模块的选择飞行控制模块是四旋翼自主飞行器的核心。
按照题目要求,飞行控制模块由ATMEGA2560处理器的开发板专门实现飞行控制算法。
为了实现自主飞行探测跟踪,必须要形成控制的闭环回路,必须要有检测和反馈系统状态的传感器,包括四旋翼的姿态、经纬度、航向、高度、空速、角速率等信号。
目前看来,国内外普遍应用MEMS器件来获取姿态、高度、空速、经纬度等信息。
此外这中间还需要有A/D采样电路、信号调理电路对采集的电信号进行必要的转换和简单的滤波。
针对四旋翼飞行器,控制方法有PID控制、反步法、滑模控制等飞行控制算法,我们采用经典的PID控制算法。
2、驱动模块的选择方案一:采用普通直流电机。
普通直流电机有价格低廉、使用简单等优点,但其扭矩较小,可控性差,此系统要求控制精度高、速度快、且质量要小,所以直流电机一般不能满足要求。
方案二:采用无刷直流电机,其具有响应速度快、较大的启动转矩,从零转速至额定转速具备可提供定转矩的性能。
2017年全国大学生电子设计竞赛————————————————————————————————作者:————————————————————————————————日期:2017年全国大学生电子设计竞赛管道内钢珠运动测量装置(M题)【高职高专】摘要:系统以STC15W4K61S4单片机为主控器,设计一款管道内钢珠运动测量装置。
该装置可以获取管道内钢珠滚动的方向,以及倒入管道内钢珠的个数和管道的倾斜角度。
并通过LCD12864液晶显示屏实时显示钢珠滚动方向、个数以及管道的倾斜角度。
系统包括单片机主控模块、角度信号采集模块、磁力传感器模块、显示模块、电源模块、采用稳压输出电源为系统提供工作电源。
系统制作成本较低、工作性能稳定,能很好达到设计要求。
关键词:角度传感器、磁性接近开关、LCD12864目录1设计任务与要求 (1)1.1设计任务 (1)1.2技术指标 (1)1.3题目评析 (1)2方案比较与选择 (2)2.1单片机选择 (2)2.2角度测量选择 (2)2.3 钢珠运动检测选择 (2)2.4显示选择 (2)2.5电源选择 (2)3电路系统与程序结构设计 (3)3.1系统硬件总体设计 (3)3.2单片机最小系统模块设计 (3)3.3角度传感器模块设计 (3)3.4 磁性传感器模块设计 (3)3.5显示模块设计 (4)3.6电源模块设计 (4)3.7程序结构与设计 (4)4系统测试 (5)5总结 (6)参考文献及附录 (6)1设计任务与要求1.1设计任务设计并制作一个管道内钢珠运动测量装置,钢珠运动部分的结构如图1.1所示。
1.2技术指标1.基本要求规定传感器宽度w≤20mm,传感器1和2之间的距离l任意选择。
(1)按照图1.1所示放置管道,由A端放入2~10粒钢珠,每粒钢珠放入的时间间隔≤2s,要求装置能够显示放入钢珠的个数。
(2)分别将管道放置为A端高于B端或B端高于A端,从高端放入1粒钢珠,要求能够显示钢珠的运动方向。
摘要:本设计以STM32F103单片机为控制核心,采用全桥式DC-AC拓扑结构,设计了输出电压和频率稳定,同时输出功率在一定范围内可调的三相逆变器,制作了由两个三相逆变器等组成的微电网模拟系统。
本系统由STM32单片机输出SPWM波控制IR2110驱动芯片驱动开关管实现正弦逆变。
采用数字PID算法实现电压反馈精准控制输出电压,通过零点检测校正输出电流相位控制相位同步,采用主从设置法实现均流控制,有效地控制了两组逆变器。
本系统具有过流保护功能,反馈系统自动调整输出功率,由OLED显示当前工作状态。
系统达到了设计要求中的大部分指标,工作稳定,经济简洁,可靠性较高。
关键词:STM32F103 SPWM 正弦逆变一、系统方案1.DC-AC模块拓扑结构的选择系统要求逆变器提供三相对称交流电。
考虑以下两种方案能够实现逆变。
方案一:三相三桥式电路结构。
三相三桥式电路成本低,能够通过软件进行补偿,电路结构简单,容易实现。
但程序控制相对复杂。
方案二:三相四桥式电路结构。
三相四桥式电路工作效率高,不会产生泻流,同时具有抗不平衡功能。
但电路结构复杂,驱动电路也相对复杂。
结合本题要求,逆变器需提供三相对称交流电且考虑到时间问题,所以采用方案一。
2.控制系统的选择方案一:采用MSP430单片机。
MSP430系列是一种16位超低功耗、具有简单指令集的混合信号处理器。
能够在25MHz晶振的驱动下,实现40ns的指令周期,具有16位的数据宽,具有独特的超低功耗,中断源较多,并且可以任意嵌套。
方案二:采用STM32F103处理器。
STM32系列运行速度快,时钟频率可达72MHz,11个定时器以及丰富的I/O口,并且内置3个12位的A/D转换器,2个12位D/A转换器,其高级定时器可产生带死区互补的PWM波,性价比较高。
鉴于STM32F103处理器运行速度更快,成本更低,资源也满足设计要求,因此本设计选用方案二。
3.电流检测方案的选择方案一:霍尔传感器。
采用ACS712霍尔传感器实现对电流的采样及检测,其测量精度高,无须考虑共模电压的影响。
但其一致性较差,且易受磁场影响。
方案二:精密电阻。
采用精密电阻将电流信号转换为电压信号,在该方式下参数一致性好,线性度高,能够达到较高的检测精度。
但在精密电阻上会存在一定损耗。
方案三:电流互感器。
电流互感器依据电磁感应原理将一次侧大电流转换成二次侧小电流来测量的仪器。
其响应频率范围宽、精度高、受外界因素影响小。
考虑到外界因素及电路损耗,选择方案三。
4.整体框图系统整体框图如图1所示。
图1 系统示意图二、理论分析与计算1.效率提高方法系统主要的损耗来源于逆变器在工作条件下的转换效率,逆变器的效率 为逆变器输出功率除以直流电源的输出功率。
能量的损耗主要是在MOS 管开关的瞬间,因此选择开关速度快,导通电阻小的MOS 管,综合比较后选择IRF3205场效应管,其导通电阻仅为8m Ω, 开关时间平均为50ns ,开启电压典型值gs V = 3V ,是一款综合性能比较适合本题的MOS 管。
同时选择适当的开关频率(SPWM 频率),较高的频率有利于提高逆变正弦电压的精度,但由于开关管寄生二极管的存在,随着频率的提高开关管的损耗也会随之增加:12on D o on s P U I t f =12off D o off s P U I t f = 开关管损耗与频率s f 成正比,开关管频率越大,损耗也随之升高。
因此,在经过多次尝试之后,开关频率选择较为适中的18kHz 。
2. 两台逆变器同时运行模式控制方法(1)均流控制为提高系统的可靠性,尽可能不增加外部均流控制措施,采用主从设置法。
主从设置法即是认为选定一个模块作为主模块,其余模块作为从模块。
用主模块的电压调节来控制其余并联模块的电压调整值,所有并联模块内部具有电流型内环控制。
由于各从模块电流按同一基准电流调制,从而与主模块电流一致,实现均流。
(2)同步相位控制方法两逆变器并联供电之后,必须保证并网后逆变输出的交流电流与电网电压波形保持同频、同相。
为保证频率同步,本系统设计的逆变器硬件结构及软件控制完全相同。
系统采用主从法实现相位同步,两逆变器分别由两个独立的STM32最小系统控制,由逆变器1的控制系统检测零点,每经过一次零点传输一次信号给逆变器2的控制系统,逆变器2接收信号后调整相位与逆变器1同步。
三、电路与程序设计1.主电路设计主电路如图2所示。
图2 正弦逆变电路逆变电路中的SPWM信号经由驱动芯片IR2110驱动MOSFET管导通,输出通过一阶LC低通滤波滤除高频成分,即得到50Hz的正弦波形。
IR2110为半桥驱动芯片,只需连接少量的阻容元件,利用内部自举电路即可实现对桥路的驱动。
逆变输出的电压波形为含有高频分量的SPWM 波,需要增加低通滤波。
采用一阶LC 滤波低通无源滤波。
电路信号中的调制波频率为50Hz 载波频率为18KHz ,所以设置滤波器的截止频率为100Hz ,电感L 和电容C 取值可按照如下公式选取:12c f = 100c f Hz =在现有的器件经过多次尝试后,取3C F μ=,1L mH =。
由于电感是手动绕制而成的,电感值存在一定的偏差。
2.控制电路设计控制电路使用两块STM32最小系统板结合驱动芯片IR2110分别控制两个逆变器配合工作。
STM32最小系统板输出原始SPWM 波经由驱动芯片IR2110完成对开关管的控制,驱动电路如图3所示。
图3 IR2110驱动电路3.系统程序框图如图4所示图4 主程序流程图四、测试方案与测试结果1.测试条件直流稳压源 型号:PF1719A 数字示波器 型号:TDS2022 万用表 型号:FLUKE 115C 2.测试方案与结果分析(1)外接负载时电流电压的测试仅使用逆变器1工作时,测试负载线电流有效值1o I ,线电压有效值1o U 。
记录测试结果。
测试结果如表1所示。
表1 测量数据分析:外接三相负载情况下,电流有效值为,电压有效值为,偏差不超过0.2V 。
(2)效率的测试测试输入、输出电压和电流,d U ,d I 和1o U ,1o I效率o d P P η=,其中11o o o P U U =⋅ ,d d d P U U =⋅。
测试结果如表2所示。
表2 测量数据分析:计算得出η=96%。
(3)失真度测试及频率测试经过数字示波器FFT粗略观察,一次谐波分量与基频相比衰减了32dB,高次谐频衰减更加迅速,计算可得,失真度约为322010-=2.51%,正弦波频率显示为50Hz。
满足基本部分的要求。
3.结果分析从以上的分析测试结果中可以看到,本系统实现了基本要求大部分指标。
五、参考文献[1] 童诗白,华程英.模拟电子技术基础(第四版)[M].北京:高等教育出版社,2009.[2] 阎石.数字电子技术基础(第五版)[M].北京:高等教育出版社,2009.[3]黄智伟,王彦,陈文光等.全国大学生电子设计竞赛训练教程[M].北京:电子工业出版社,2007.[4] 高吉祥,唐朝京.全国大学生电子设计竞赛培训系列教程(电子仪器仪表设计)[M].北京:电子工业出版社,2007.[5] 杨振江等.基于STM32 ARM处理器的编程技术[M].西安:西安电子科技大学出版社,2016.[6](美)Sanjaya Maniktala.精通开关电源设计[M].北京:人民邮电出版社,2015.附录I:完整电路图附录II:主程序源代码//#include "stm32f10x.h"#include "pwm.h"#include "led.h"#include "delay.h"#include "adc.h"#include "OLED_I2C.h"#include "stdlib.h"#include "math.h"//#include "usart.h"extern vu16 AD_Value[N][M]; //用来存放ADC转换结果,也是DMA的目标地址extern vu16 After_filter [M]; ////用来存放求平均值extern float k;int main(void){u16 adc1;//u16 adc2;float temp,temp1,itemp;delay_init();LED_Init();Adc_Init();MYDMA_Config(DMA1_Channel1,(u32)&ADC1->DR,(u32)&AD_Value,N*M );ADC_SoftwareStartConvCmd(ADC1, ENABLE);DMA_Cmd(DMA1_Channel1, ENABLE); //启动DMA通道NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);TIM1_PWM_Init(1999,1);//PWM 频率=72000/(256)/46I2C_Configuration();OLED_Init();OLED_CLS();//清屏OLED_ShowStr(0,0,"ADC_CH1_V AL:",1);OLED_ShowStr(0,2,"ADC_CH1_VOL:0.00V",1);OLED_ShowStr(0,4,"ADC_CH1_RVL:00.00V",1);OLED_ShowStr(0,6,"ADC_CH1_xxL:0.0",1);//OLED_ShowStr(0,6,"ADC_CH1_AOL: 0.000A",1);k=1;while(1){Get_Adc_Average();adc1=After_filter[0];//adc2=After_filter[1];OLED_ShowNum(72,0,adc1,5,1);//显示ADC 的值//itemp=temp1;temp=(float)adc1*(3.3/4096);//temp1=10*temp+0.8;// temp1=14.3294*temp/1.4142;// temp1=15.1656*temp/1.4142;// temp1=14.5687*temp/1.4142;temp1=15.6692*temp/1.4142-1.7125;itemp=temp1;//if(k<0.99)temp1=14.7073*temp/1.4142;elsetemp1=14.6392*temp/1.4142;if((itemp-24.0)>0.04||(24.0-itemp)>0.04){if(k>=0.8){ if(itemp-24){if(itemp-24>1)k-=0.04;else if(itemp-24>0.5)k-=0.03;else if(itemp-24>0.3)k-=0.02;else if(itemp-24>0.2)k-=0.008;else if(itemp-24>0.1)k-=0.001;}}if(k<=1.1){if(24-itemp){if(itemp-24>1)k+=0.01;else if(24-itemp>0.5)k+=0.008;else if(24-itemp>0.3)k+=0.005;else if(24-itemp>0.2)k+=0.002;else if(24-itemp>0.1)k+=0.0005;}}}adc1=k;OLED_ShowxNum(72,6,adc1,1,1);adc1=k*100-adc1*100;OLED_ShowxNum(72+12,6,adc1,2,1);delay_ms(20);LED1=!LED1;adc1=temp;OLED_ShowxNum(72,2,adc1,1,1);//显示电压值temp-=adc1;temp*=100;OLED_ShowxNum(72+12,2,temp,2,1);adc1=temp1;OLED_ShowxNum(72,4,adc1,2,1);//显示基准电压值temp1-=adc1;temp1*=100;OLED_ShowxNum(72+18,4,temp1,2,1);//// adc1=itemp;// OLED_ShowxNum(72,6,adc1,2,1);//显示基准电压值// itemp-=adc1;// itemp*=100;// OLED_ShowxNum(72+18,6,temp1,2,1);// temp1=(float)adc2*(3.3/4096);// adc2=temp1;// OLED_ShowxNum(72,0,adc2,1,1);//显示基准电压值// temp1-=adc2;// temp1*=1000;// OLED_ShowxNum(72+12,0,temp1,3,1); //// delay_ms(500);}}。