高精度复合轴跟踪控制系统
- 格式:ppt
- 大小:1.76 MB
- 文档页数:23
基于复合控制的某型雷达伺服系统优化作者:沈浩蔡新举来源:《现代电子技术》2008年第11期摘要:针对传统的雷达伺服系统精度受动态设计中系统自身因素的制约而达不到期望特性的情况,提出了一种高阶无静差系统的实现,即把复合控制引入位置回路,前馈至速度回路输入端。
将此种方案应用于某型雷达伺服系统,仿真实验表明在不影响系统稳定性的前提下,可使系统的幅频特性在低频段表现出极低的斜度,加速度常数增大,加速度误差减小,系统精度显著提高。
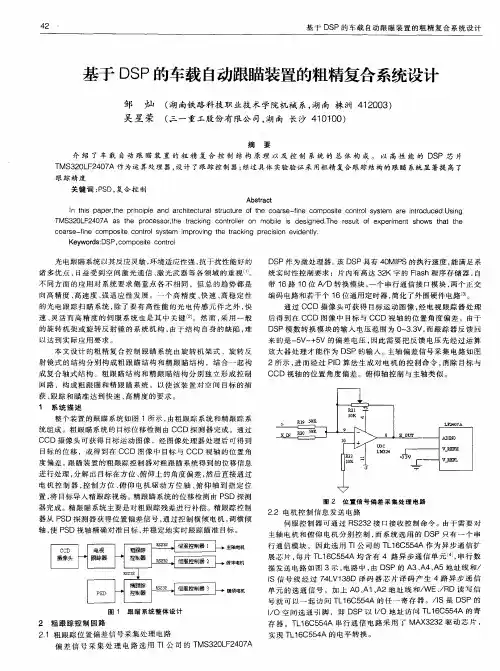
关键词:雷达伺服;复合控制;精度优化;精密跟踪中图分类号:TN952 文献标识码:B文章编号:1004-373X(2008)11-018-Optimization of a Certain Radar Servo System Based on Combination-Loop-Control(Naval Aeronautical Engineering Institute,Yantai,264001,China)Abstract:To solve the problem that the accuracy of traditional radar servo system can not reach to anticipant property in dynamic design due to the restriction of the system factors,a way to the realization of high rank no-static-error system is proposed,in which combination-loop-control is placed to location loop,feeding forward to the input of the speed loop.The simulation proves that without losing stability,the system shows very trivial pitch in magnitude- frequency property.Thus,the acceleration error is reduced as the acceleration coefficient is enlarged,and finally the system accuracy is notably raised.Keywords:radar servo;combination-loop-control;accuracy optimization;precision tracking1 引言伺服系统是精密跟踪雷达的重要组成部分,它根据雷达控制台的工作方式命令求解雷达天线与目标之间的角误差信号,控制天线精密跟踪飞行目标,并实时测量雷达机械轴位置。

光电精密跟踪中的复合轴系统及子轴控制的研究随着现代工业的发展,越来越需要更精确地控制机器轴系统,以满足更高精度的工业作业。
光电跟踪技术是一种利用目标符号识别、光学系统或传感器和机电一体化等技术实现机器轴系统(例如直线导轨系统)运动控制的现代工控制系统。
由于其高精度、快速响应、节省开支等优点,光电跟踪技术在机械加工、航空航天、汽车制造及其他工程应用领域得到了越来越多的应用。
复合轴系统是光电精密跟踪技术的关键因素之一,包括子轴和主轴。
轴系统中主控制轴线定义了运动控制系统中的工作位置和运动轨迹,而子轴控制轴线可以使物体和仪器旋转、平移以及变形,使得物体的运动的准确性和精确度得到提高。
因此,研究分解复合轴系统中子轴控制,使其得到准确的控制,对于保证光电精密跟踪的普遍应用具有重要的意义。
子轴控制器可以通过电机连接和旋转实现,以控制复合轴系统工作位置。
在复合轴系统中,子轴控制系统可以实现准确控制,通过调整角速度及角位置,从而实现复合轴系统的多维空间控制。
为了实现子轴控制,对子轴电机的性能进行优化,以确保其获得良好的空间性能,特别是在运动控制系统中使用电机进行高精度控制时,其性能较为关键,当轴系统处于一定载荷、低温、湿环境下时,电机的精度还会逐渐降低。
因此,研究和优化子轴电机的力学性能和控制算法,对于提高复合轴系统的稳定性和精度具有重要的意义。
根据上述分析,研究复合轴系统以及其中的子轴控制,对于推动光电精密跟踪技术的广泛应用,具有重要意义。
研究者不仅要分析复合轴系统及其旋转、平移等变形,还要研究子轴控制器的力学性能和控制算法,优化其电机性能,以确保机器轴系统的正常运行和精确控制。
实际上,研究子轴控制将有助于提高光电精密跟踪技术的精度,从而为机械加工、航空航天、汽车制造及其他工程应用技术提供解决方案。
战术激光武器跟瞄精度分析易瑔;孙先知;杨建昌;王林森;何炳阳【摘要】Laser weapons as a new type of directional weapons and equipment,compared with the traditional weapons and equipment,must have a higher accuracy requirements.This paper uses the method of theoretical analysis and simulation to analyze the requirements of laser weapon hitting probability and spot stability to determine the accuracy of laser weapons in different atmospheric environment. Taking the "sea stone"laser weapon system as an example,the aim of the aiming accuracyis analyzed,and the main factors influencing the aiming accuracy are put forward. This paper provides a reference for the research of laser weapon.%激光武器作为新型的定向高能武器装备,与传统的武器装备相比,对跟瞄精度有更高要求.运用理论分析、模拟仿真的方法,通过对激光武器命中概率、光斑稳定概率的分析,确定了不同的大气环境下,激光武器对跟瞄精度的要求,并以"海石"激光武器系统为例,进行了跟瞄精度分析,提出了影响跟瞄精度的主要因素,为激光武器的研究提供了借鉴.【期刊名称】《火力与指挥控制》【年(卷),期】2018(043)006【总页数】5页(P98-102)【关键词】跟瞄精度;衍射;大气湍流;命中概率;稳定概率【作者】易瑔;孙先知;杨建昌;王林森;何炳阳【作者单位】陆军装甲兵学院,北京 10072;陆军装甲兵学院,北京 10072;陆军装甲兵学院,北京 10072;陆军装甲兵学院,北京 10072;陆军装甲兵学院,北京 10072【正文语种】中文【中图分类】TJ95;TJ990 引言激光武器作为一种新型的定向武器装备,通过对目标的捕获、跟踪、瞄准,来实现精确打击。
《面向复合加工的数控系统多轴多通道控制技术的研究》一、引言随着制造业的快速发展,复合加工技术已经成为现代制造领域的重要技术之一。
这种技术通过将多种加工工艺集成在一起,实现了高效、高精度的加工过程。
而数控系统作为复合加工技术的核心,其多轴多通道控制技术更是直接关系到加工质量和效率。
因此,研究面向复合加工的数控系统多轴多通道控制技术具有重要的理论意义和实际应用价值。
二、复合加工及数控系统概述复合加工技术,即综合运用多种加工手段对同一工件进行一次或多次加工,具有高效、高精度的特点。
它要求加工系统具有高度的协调性和一致性。
数控系统则是实现这一目标的核心,通过高精度、高效率的控制策略,实现多轴联动和多通道协同。
三、多轴多通道控制技术分析(一)多轴控制技术多轴控制技术是数控系统的关键技术之一,它通过控制多个轴的协同运动,实现复杂工件的加工。
在复合加工中,多轴控制技术要求各个轴之间的高度协调和同步,以保证加工精度和效率。
此外,还要考虑轴的动力学特性、刚度、热变形等因素,以实现稳定的加工过程。
(二)多通道控制技术多通道控制技术是数控系统的另一重要技术,它通过多个独立的通道同时控制多个轴或多个加工过程。
在复合加工中,多通道控制技术可以实现多个加工工艺的并行处理,提高加工效率。
同时,各个通道之间要实现信息的实时交互和共享,以保证加工过程的协调性和一致性。
四、面向复合加工的数控系统多轴多通道控制策略研究(一)多轴联动控制策略针对复合加工的多轴联动需求,研究相应的控制策略是必要的。
这包括轴间协调策略、路径规划策略、速度与加速度控制策略等。
通过优化这些策略,可以实现多轴的高效协同和精确控制。
(二)多通道协同控制策略多通道协同控制策略是实现多个加工工艺并行处理的关键。
这需要研究通道间的信息交互机制、协同算法以及资源分配策略等。
通过优化这些策略,可以实现多个通道之间的实时协同和高效交互。
五、实验验证与应用分析为了验证所研究的面向复合加工的数控系统多轴多通道控制技术的有效性,进行了一系列实验。
压电式快速反射镜系统建模与传递函数辨识陆金磊;姜晓明;王军【摘要】为在高精度跟瞄系统中对压电式快速反射镜(PFSM)实现稳定、精确的控制,构建了PFSM系统的传递函数模型,并结合实测的PFSM系统幅频和相频响应特性,使用非线性最小二乘曲线拟合法,针对不同频率特性进行分段拟合,得到了精确的PFSM系统传递函数.与实测结果相比,在中低频段,幅度辨识误差在0.1 dB以内,相位辨识误差小于1°.由此设计的双二阶滤波器和经典比例积分(PI)相结合的控制算法有效降低了机械谐振的影响,使系统的幅值裕度提高了10.94 dB,相位裕度提高了47.2°,开环截止频率提高了181 Hz.结果表明:通过理论推导建立的PFSM模型是合理的,辨识方法具有可行性,且精度很高,为PFSM系统的复杂控制器设计提供了依据.【期刊名称】《上海航天》【年(卷),期】2019(036)001【总页数】6页(P109-114)【关键词】压电式快速反射镜;建模;传递函数辨识;最小二乘法;双二阶滤波器【作者】陆金磊;姜晓明;王军【作者单位】南京理工大学先进发射协同创新中心,江苏南京210094;上海机电工程研究所,上海201109;南京理工大学先进发射协同创新中心,江苏南京210094【正文语种】中文【中图分类】V5560 引言压电式快速反射镜(PFSM)采用压电叠堆作为驱动器[1],具有体积小、响应快、精度高、动态性能好等优点,在自适应光学[2]、图像稳定系统[3-4]、目标跟踪系统[5-6]、生物医学系统[7]等领域具有广泛的应用前景。
本文将PFSM应用在光电精密跟踪系统中,将其作为复合轴子系统的执行机构,主要用于校正机架主系统的随机误差。
为稳定跟踪目标,光电跟瞄系统的精度需要达到微弧度级,这对PFSM 的控制精度提出了很高要求。
对于控制设计者来说,如何获得被控对象的精准数学模型极为关键。
目前,常用的传递函数参数辨识方法主要包括时域阶跃响应法和频域频率响应法。
激光武器复合轴光电跟踪系统相关知识学习综述激光武器是反精确制导武器、卫星等目标的最有力手段。
它主要由高能激光器、光束控制发射装置、侦察定位装置和精密跟踪瞄准系统组成。
捕获和精密跟瞄技术将成为激光武器研制中最重要的技术。
激光武器系统不仅要求将运动目标稳定跟踪在规定视场内,而且要求将光束锁定在目标某一点上,跟踪精度达到角秒级。
采用复合轴跟踪系统能够克服单轴跟踪架的结构谐振频率的限制,且使系统具有足够的带宽。
高精度跟踪和瞄准目标是系统控制技术的难点。
1 激光器原理激光器装置的必不可少的组成部分包括激励(或抽运)、具有亚稳态能级的工作介质和谐振腔3部分。
激励是工作介质吸收外来能量后激发到激发态,为实现并维持粒子数反转创造条件。
激励方式有光学激励、电激励、化学激励和核能激励等。
工作介质具有亚稳能级,使受激辐射占主导地位,从而实现光放大。
谐振腔可使腔内的光子有一致的频率、相位和运行方向,从而使激光具有良好的定向性和相干性。
(1)激光工作物质用来实现粒子数反转并产生光的受激辐射放大作用的物质体系,有时也称为激光增益媒质,它们可以是固体(晶体、玻璃)、气体(原子气体、离子气体、分子气体)、半导体和液体等媒质。
对激光工作物质的主要要求,是尽可能在其工作粒子的特定能级间实现较大程度的粒子数反转,并使这种反转在整个激光发射作用过程中尽可能有效地保持下去;为此,要求工作物质具有合适的能级结构和跃迁特性。
(2)激励(泵浦)系统为使激光工作物质实现并维持粒子数反转而提供能量来源的机构或装置。
根据工作物质和激光器运转条件的不同,可以采取不同的激励方式和激励装置,常见的有以下四种:①光学激励(光泵)。
是利用外界光源发出的光来辐照工作物质以实现粒子数反转的,整个激励装置,通常是由气体放电光源(如氙灯、氪灯)和聚光器组成。
②气体放电激励。
是利用在气体工作物质内发生的气体放电过程来实现粒子数反转的,整个激励装置通常由放电电极和放电电源组成。
本科毕业设计论文题目激光武器光电跟踪瞄准系统的设计与仿真专业名称学生姓名指导教师毕业时间2014年6月西北工业大学明德学院本科毕业设计论文毕业 任务书一、题目光电跟踪瞄准控制系统的分析与设计二、指导思想和目的要求1.利用已有的专业知识,培养学生解决实际工程问题的能力;2.锻炼学生的科研工作能力和培养学生的攻关能力;三、主要技术指标1.详细分析光电跟踪瞄准控制系统组成和机理;2.设计光电跟踪瞄准控制系统;3.对所设计的光电跟踪瞄准控制系统进行仿真验证及分析;四、进度和要求第01周----第02周: 英文翻译;第03周----第05周: 光电跟踪瞄准控制系统机理研究;第06周----第07周: 熟悉Matlab/Simulink 等相关软件;第08周----第13周: 设计光电跟踪瞄准控制系统;第14周----第16周: 建立控制系统仿真模型进行验证分析;第17周----第18周: 撰写毕业设计论文,论文答辩;五、主要参考书及参考资料1.张秉华,张守辉.光电成像跟踪系统[M].成都:电子科技大学出版社.2.刘廷霞.光电跟踪系统复合轴伺服控制技术的研究[D](博士学位论文),中国科学院长春光学精密机械与物理研究所.3.王建立.光电经纬仪电视跟踪捕获快速运动目标技术的研究[D](博士学位论文),中国科学院长春光学精密机械与物理研究所.4.冯艳平.星间光通信ATP 跟踪控制环路研究及FPGA 实现[D](硕士学位论文),电子科技大学.学生 指导教师 系主任设计论文摘要近年来,随着精确制导武器技术的不断发展和作战样式的改变,以美国为首的西方发达国家纷纷把发展精确制导武器的重点转向了防区外中远程精确打击武器之上。
发展“高能激光武器系统”可有效对抗中远程精确打击武器这一新的作战目标。
本文重点在于激光武器装备中,精密捕获、跟踪、瞄准系统的分析与设计。
它与一般光电测量系统的区别在于,它不仅要求将运动目标稳定跟踪在规定视场内,而且要求将光束锁定在目标某一点上。
2014年第10期液压与气动 77doi :10.11832“.is sn .1000—4858.2014.10.018基于干扰观测器和最优LQR 的电 液压系统的复合控制研究吴常红(吉林铁道职业技术学院汽车工程系,吉林吉林132100)摘要:随着电液压系统在自动控制领域的广泛应用,复杂工艺环境对其性能的要求也越来越高,但是 模型不确定性和负载力矩干扰的存在阻碍了系统性能的进一步提升。
针对干扰观测器(Dist urbanc e Observ . er ,DOB)在提高控制系统鲁棒性方面的优势,以及复合控制器在改善伺服系统跟踪性能方面的能力,提出了 一种双环控制结构,即内环DO B 与外环复合控制器相结合的方式。
同时,在构造外环复合控制器时,采用状 态空间设计的方法,并借助于最优LQR 理论。
计算机仿真结果表明,相比传统控制方案,所提出的双环控制 方案可实现电液压系统更精确的位置跟踪以及针对建模误差和负载力矩干扰的更强鲁棒性。
此外,该研究 控制方案的结构较为简单,易于工程实现。
关键词:电液压;干扰观测器;复合控制;LQR ;鲁棒性中图分类号:THl37;吼73 文献标志码:B文章编号:10004858(2014)10旬077旬5Compound Control of E lec tro —hy drau lic Sy ste m Bas ed onDis tur ba nce O bs enr er a nd O pti ma l LQRW U Chang —hong(Dep aT tme nt 0f Aut omoti ve Engineering ,Jilin Rail w 町Vo ca li on al 明d 1kllIIolo 盱College ,Ji hn ,Jil in l32100)Abs 晌ct : Wi山that electro —hy drau lic s yste ms a r e more and more widely used inmany automa tic c ontm la r ea s ,more and mor e h 培h ped .o 珊ances of tllem ar e required for complicated process environment ,however tI l eimprov e — ment of s ys t e m perfb 咖ancesis restrictedby model uncenainties and loading mom e n t dis t山.ballces . Bec au se the dis — turbance obsenrer(DOB) possesses 出 e advaIltage in enhar Ici ng tlle mbustnes s ofcontIDl system , and the com — pound controller has tIIe abilit)r of impr0Ving theⅡacking ped-omance of se n r o syst em ,onecontrol scheme with a 眦。