机械原理常见机构的数学建模之小论文
- 格式:docx
- 大小:43.64 KB
- 文档页数:4
摘要关键词IAbstract Key words:II目录第一章绪论 (1)1.1课题背景 (1)1.2课题的价值及意义 (2)1.3课题的国内外研究现状 (3)1.3.1 国外小型无人直升机研究现状 (3)1.3.2 国内小型无人直升机研究现状 (5)1.4小型无人直升机建模的难点、重点及核心问题 (6)第二章小型无人直升机动力学模型 (7)2.1小型无人直升机建模技术概况 (7)2.1.1 第一性原理建模 (7)2.1.2 系统辨识建模 (8)2.2坐标系的定义与说明 (10)2.2.1 大地坐标系 (10)2.2.2 机身坐标系 (10)2.2.3 大地坐标系和机身坐标系的转换 (11)2.3小型无人直升机动力学模型 (13)2.3.1 小型无人直升机的操纵原理 (13)2.3.2 小型无人直升机的刚体动力学 (14)2.3.2.1 通用刚体运动方程 (14)2.3.2.2 通用刚体动力学的扩展 (17)2.3.3 小型无人直升机的力和力矩 (17)2.3.3.1 主旋翼动力学模型 (17)2.3.3.2 尾桨动力学模型 (19)2.3.3.3 机身动力学模型 (20)2.3.3.4 水平安定面动力学模型 (21)2.3.3.5 垂直安定面动力学模型 (21)2.3.4 小型无人直升机旋翼的动态特性 (22)2.3.4.1 旋翼的挥舞运动 (23)2.3.4.2挥舞运动方程 (24)III2.4小型无人直升机悬停状态下的完整模型 (26)第三章小型无人直升机模型线性化及参数辨识 (28)3.1小型无人直升机悬停状态下的模型线性化 (28)3.1.1 小型无人直升机小扰动线性微分运动方程 (28)3.1.2 垂向和航向 (30)3.1.3 悬停状态下小扰动线性微分运动方程 (32)3.1.4 改进后的小型无人直升机悬停状态下的线性模型 (32)3.2模型的参数辨识 (34)3.2.1 频域辨识简介 (34)3.2.2 基于偏相干分析法的频域辨识 (36)3.3飞行实验及参数辨识结果分析 (39)3.3.1 扫频实验方案 (39)3.3.2 数据的选择和处理 (41)3.3.3 实验结果与分析 (42)第四章小型无人直升机模型仿真验证 (44)4.1M ATLAB和S IMULINK简介 (44)4.2模型仿真 (44)4.2.1 模型构建 (44)4.2.2 模块化编程 (44)4.2.3 系统仿真 (44)4.3仿真模型验证 (44)第五章模型仿真结果分析 ....................................................................................错误!未定义书签。

简单的机械原理篇一简单的机械原理说真的,一开始听到“简单的机械原理”这几个字,我脑子里就蹦出各种复杂的公式和图纸,感觉头都大了。
但其实,想想咱们生活中,到处都是机械原理的应用,只是咱们平时没太注意而已。
就拿我前几天修自行车的事儿来说吧。
我的自行车后轮轴那儿老是叽里呱啦响,烦死人了!一开始我还以为是链条松了,结果捣鼓半天没啥用。
后来仔细一看,才发现是后轮轴的螺母松了,导致轮子有点歪,跟车架摩擦才发出噪音。
这螺母啊,就像是个简单的螺丝钉,但它用上了“螺旋”这个绝妙的机械原理。
螺纹的斜面让螺母随着旋转产生轴向位移,拧紧的时候,螺母就能牢牢地固定住后轮轴,让它不晃动。
我当时拧螺母的时候,还特意感受了一下用力方向和螺母转动的关系,感觉还挺有意思的,这小小的螺母,竟然蕴含着这么大的学问!要是螺母的螺纹设计得不好,可能拧半天也拧不紧,甚至螺纹还会磨损,那我的自行车就更惨了。
修完自行车后,我感觉自己对“简单的机械原理”有了更直观的理解,它根本不是什么高不可攀的东西,反而就在我们身边,默默地工作着。
篇二简单的机械原理接着说我那辆“叽里呱啦”的自行车。
除了后轮轴的螺母,我还发现了另一个“简单的机械原理”的应用,那就是车闸。
我那辆自行车是那种最普通的V型刹车,就是那种用一根线拉动刹车块夹住车轮的刹车。
这个刹车的原理其实就是“杠杆”。
刹车把手就是杠杆的支点,你的手指用力的方向是动力,然后通过刹车线传递到刹车块,而刹车块夹住轮子产生的阻力就是阻力。
这个杠杆的作用,就是能够放大你的手指力量,让你轻松地把车停下来。
我试着轻轻捏刹车,车轮稍微有点阻力,用力捏就停得很快,这力量的放大效果太明显了!而且我发现,刹车把手和刹车块之间的距离,以及刹车块和车轮的接触点,都影响着刹车效果。
这个距离的设计,也是需要经过精确的计算,才能保证既能有效制动,又不会太费力。
所以,看似简单的自行车刹车,里面其实也包含着杠杆原理的精妙之处,这都是一些简单的机械原理在发挥作用,而且和螺母的原理完全不同,这让我觉得挺神奇的!篇三简单的机械原理最后再总结一下吧,我修自行车的经历让我深刻体会到,简单的机械原理其实就蕴含在我们日常生活中各种不起眼的小物件里。
基于PROE的螺旋机构的建模与分析————————————————————————————————作者:————————————————————————————————日期:攀枝花学院专科毕业论文(设计)基于Pro/E的CA6140A机床螺旋机构的建模与分析学生姓名:伏蓉学生学号: 2院(系):工程技术学院年级专业: 09级机电一体化技术指导教师: 张健讲师助理指导教师:二零一二年五月摘要螺旋传动是一种重要的传动方式,每个机床都有螺旋传动机构。
机床中运用的一般是传导螺旋和调整螺旋,传导螺旋用在机床的刀架和工作台的进给机构中,而调整螺旋起到微调的作用。
典型的螺旋运动方式是丝杠转动、螺母移动。
利用传动均匀、平稳、准确的优点,以传递运动为主,有较高的传动精度,可承受较大的轴向负荷,主要用于高速回转、连续工作、要求高效率、高精度的场合,如机床的刀架和工作台的进给机构。
本文主要研究螺旋传动及其在机床上的应用,将机床中的螺旋机构运用PRO/E绘图软件进行建模,为机床螺旋机构的设计及优化提供一定的理论依据。
关键词机床,螺旋机构,PRO/E软件,建模,机构分析ABSTRACTScrew driveis animportant transmission model;eachmachine hasascrewdrive mechanism. Machine is generally conducted inthe use of screw andadjusts thescrew, screwtransmissionusedin themachine toolholderand the table fee dmechanism,whilefine-tuning adjustment screwplayarole.A typical way tospread spiral screw rotation,thenut moves. U sing transmission uniform,smooth,accurate and advantages, the main motion to pass, a highertransmission accuracy,a nd can bearlarge axial load, mainly for high-speed rotation,continuous worλ, requiring high efficiency,highprecision ofthe occasion,If the machine tool holder and the tablebody institutions.This main screwdrive anditsapplication inthe machine, themachine screw mechanism in the use of PRO / E model mapping software ont he line,and their bodies on the line some brief analysisfor the machine design and optimization of screw mechanism providesatheoretical basis.ΛeywordsMachinetools,screw mechanism, PRO/Esoftware, modeling,institutionalanalysis目录摘要ﻩ错误!未定义书签。
数学建模在机械设计与制造方面的应用摘要:数学建模的思想就是用数学的思路、方法去解决实际生产、生活当中所遇到的问题。
古今中外几乎一切应用科学的基础都是数学建模,凡是要用数学解决的实际问题也都是通过数学建模的过程来实现的。
尤其到了20世纪中叶计算机和其他技术突飞猛进的发展,给数学建模以极大的推动,通过数学建模也极大地扩大了数学的应用范围。
人们越来越认识到数学建模的重要性。
曾经有位外国学者说过:“一切科学和工程技术人员的教育必须包括数学和计算数学的更多内容。
数学建模……以机械专业知识为背景,用“数学建模”的思想方法去分析解决案例中提出的问题,在数学知识与机械专业知识间架起沟通的桥梁。
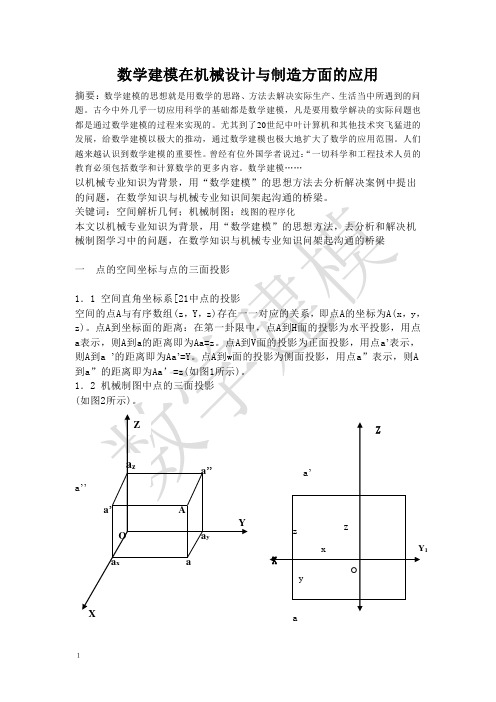
1a1(a1Y例1 已知空间点A 的坐标(20,10,15),求作点A 的三面投影图。
作图步骤(1)先画出投影轴,再由。
点向左沿OX 轴量取.17=20,得n ;点;(2)过a 。
点作垂直于Ox 的投影连线,在投影连线上由a ;点向下量取Y 一10,得水平投影a 点;在投影连线上由口:点向上量取z=15,得正面投影a 7点;(3)由a 、a ’求出侧面投影a ”点。
过a ’点作a ’a z 垂直0z ,过点0作45度辅助线,过a 点作OY 的垂线,与45度辅助线相交于一点,过交点作OYw 垂线与投影连线a ’a ;相交,交点即为点A 的侧面投影a ’’点例2 A 点到OX 轴的距离为20mm ,到OZ 轴的距离为25mm ,并已知该点到H 面的距离为12mm ,试求点A 的三面投影1.4 空间两点位置比较由已知点确定另一点位置: (1)直接根据点的坐标值确定。
(2)根据各点到已知点A 的坐标差确定(即两点间的坐标差确定)例3 已知点A 的正面投影n 7点和侧面投影口”点,又知B 点在A 点左方20mm ,后方10mm 下方5mm ,C 点在A 点正下方10mm ,求作A 点的水平投影和B ,C 点的三面投影,并判断点的可见性。

贵州民族学院《机械原理》课程论文(设计)《缝纫机主要机构》学院计算机与信息工程学院专业电子信息班级09 电子姓名刘玲学号************指导教师葛一凡摘要:本文主要介绍缝纫机机头的传动结构及缝纫机机的工作原理。
关键词:缝纫机原理结构首先:缝纫机机头的传动结构1.缝纫机机头结构简图如下:(1)上轮(2)上轴(3)挑线凸轮(4)挑线杆(5)小连杆(6)针杆(7)送布凸轮(8)牙叉(9)牙叉滑块(10)针距座(11)送布曲柄(12)送布轴(13)牙架(14)送布牙(15)抬牙曲柄(16)抬牙轴(17)摆轴偏心凸轮(18)摆轴(19)大连杆(20)摆轴滑块(21)下轴曲柄(22)下轴(23)摆梭托,摆梭引线机构:(1),(2),(3),(5),(6)挑线机构:(1),(2),(3),(4)钩线机构:(1),(2),(19),(18),(20),(21),(22),(23)送布机构:(1),(2),(7),(8),(9),(10),(11),(12),(13),(14),(15),(16),(17),(18)图上未画的压紧杆部分也属于送布机构还有自成一体的第五大机构:绕线机构。
由于它是辅助机构,故未在图上画出②.缝纫机线迹形成过程这样才能形成双线连锁线迹呢?从上图中看他的交合情况,要使两根线交合必须把面线绕在布线上面的线团上,底线绕在缝料下面的轮上,当面线从布的上面线团拉出,通过缝纫机机针引入缝料的下面并形成一个环,绕过轮然后再向上收紧,在两层缝料间和底线间组成一个交合点,周而复始上述动作,即形成一组双线连锁线迹。
下面通过梭摆钩线形成一个线迹的过程来分析各机构的动作要求(1)线环的形成:机针从最高位置向下运动,在缝针没有接触缝料之前,挑线杆向上运动完成收紧上一个线迹的工作,并从线团里拉出形成下一个线环所需的面线,与此同时,送布牙也完成向前推送缝料的动作,开始向针缝下方运动,此时摆梭逆时针旋转也到极限位置,在这期间挑线杆是向下运动的,以松驰面线,供机针向下引线用,接着机针开始回升,由于机针短曹一侧的缝料对面线的阻力作用,此段面线滞留在缝料之下,加上梭床盖对机针长槽一侧面线的阻拦作用,结果就在机针短槽一侧形成了一个梨行的线环,在线环形成最佳状态时,挑线杆暂停向下运动,以免影响线环的形状,这时送布牙在针板之下向原来位置退回,所以对线环和缝料均无影响。

《机械原理》平面机构运动论文摘要:平面机构的运动分析是《机械原理》课程的重点教学内容,矢量方程图解法是其教学难点,对于其基本原理和求解方法,应做到概念明确和思路清晰。
新补充的解法不仅仅是对原有求解方法的补充和完善,更是对原有求解方法的更正,避免错误的长期存在。
尤其是作为教材,更不能起到误导的作用。
关键词:机械原理平面机构运动分析《机械原理》是机械类各专业中研究机械共性的一门专业基础课程。
它的主要任务是使学生掌握各种基本机构及由其所组成的机械系统的基础理论、基本知识、分析和设计方法,并具备进行机械系统运动方案设计的初步能力。
它的知识结构承前启后,是学习相关专业课的基础。
在《机械原理》教学中,平面机构的运动分析是必不可少的教学内容,无论是设计新机械还是对现有机构进行分析,都要用到机构的运动分析知识。
而平面机构运动分析中的矢量方程图解法是运动分析教学的一个重点难点内容。
在多年的教学实践过程中,笔者发现通用的《机械原理》教材中对矢量方程图解法的一些说法有语焉不详或不准确的地方,现提出问题的所在并对问题进行分析、更正和解法补充,与大家探讨。
1 矢量方程图解法的基本原理和作法矢量方程图解法是平面机构运动分析的一种常用方法,可同时进行机构的速度、加速度分析,其基本原理是理论力学的运动学理论:“刚体的平面运动是随基点的牵连运动和绕基点的相对运动的合成”及“重合点的绝对运动是牵连运动和相对运动的合成”。
在用矢量方程图解法对机构进行速度和加速度分析时,首先是根据相对运动原理,建立点与点之间的速度和加速度矢量方程,然后根据矢量方程图解条件作图求解,按比例绘出机构的速度多边形和加速度多边形,求得未知的运动参数。
机构运动分析可为分两种情况:1)同一构件上两点间速度及加速度的关系;2)两构件重合点间的速度和加速度的关系。
2 引例及其传统的求解方法在图1(a)所示的曲柄滑块机构中,设已知各构件尺寸和原动件1以角速度ω1匀速转动,则A点的运动已知。
机械原理课程设计中典型机构的建模和仿真陈修龙;宋浩;姜帅;邓昱;王清【摘要】为了实现“机械原理”课程设计中提出的一种新型六杆肘杆式机械压力机机构的运动学和静力学分析,利用解析法分别建立了压力机机构的运动学和动态静力学模型.首先,应用复数矢量法推导出了压力机机构的位置、速度和加速度求解方程;其次,应用达朗贝尔原理建立压力机机构的动态静力学方程;最后,分别利用Matlab理论计算与ADAMS虚拟样机仿真得到冲锤的位置曲线、速度曲线、加速度曲线,以及平衡力、运动副约束反力曲线,验证了所建运动学模型、动态静力学模型的正确性.【期刊名称】《实验室科学》【年(卷),期】2018(021)001【总页数】8页(P42-48,51)【关键词】机械原理;压力机;运动分析;动态静力学;虚拟仿真【作者】陈修龙;宋浩;姜帅;邓昱;王清【作者单位】山东科技大学机械电子工程学院,山东青岛 266590;山东科技大学机械电子工程学院,山东青岛 266590;山东科技大学机械电子工程学院,山东青岛266590;山东科技大学机械电子工程学院,山东青岛 266590;山东科技大学纳米工程研究所,山东青岛 266590【正文语种】中文【中图分类】TG315“机械原理”课程设计是培养学生机构创新设计和机构分析能力的重要环节,但传统课程设计大都是针对机构分析的图解法,如利用图解法完成牛头刨床机构的运动学和动态静力学分析等,众所周知,机构分析图解法的精度要低于解析法的精度,这无法与现代高速度和高精度机械装备的研发相适应。
因此,迫切需要在“机械原理”的课程设计中完成典型机构的其解析法建模和虚拟样机仿真分析,以提高学生工程实践能力。
多连杆机械压力机与传统的曲柄—滑块压力机相比,具有滑块运动可控性强、制成品精度高、效率高、噪声低、振动小、模具寿命长和节能环保等优点[1-3],可实现传统的曲柄—滑块压力机不能达到的成型工艺,满足多种冲压作业的要求,受到了工业界和学者们的重视[4-6]。
课程设计说明书题目牛头刨床主传动机构设计课程名称机械原理课程设计二级学院机电工程学院专业机械设计制造及其自动化班级 2014级学生姓名 xxx学号 xxx设计地点 D105指导教师 xxx设计起止时间:2016年6月20日至2016年6月26日目录一、牛头刨床的工作原理 (1)二、设计任务与要求 (2)(一)设计任务 (2)(二)设计要求 (2)三、连杆机构对比 (3)(一)方案a (3)(二)方案b (3)(三)方案c (3)四、连杆机构设计 (4)(一)导杆机构尺寸 (4)(二)机构简图 (4)五、连杆机构的运动分析 (5)(一)速度分析 (5)(二)加速度分析 (7)六、凸轮机构设计 (10)七、结论与心得 (12)八、参考文献 (12)牛头刨床主传动机构设计一、牛头刨床的工作原理牛头刨床是一种靠刀具的往复直线运动及工作台的间歇运动来完成工件的平面切削加工的机床。
图1为其参考示意图。
刨床工作时,刨头6由曲柄2带动右行,刨刀进行切削,称为工作行程。
在切削行程H中,前后各有一段0.05H的空刀距离,工作阻力F为常数;刨刀左行时,即为空回行程,此行程无工作阻力。
在刨刀空回行程时电动机经过减速传动装置(皮带和齿轮传动)带动执行机构(导杆机构和凸轮机构)完成刨刀的往复运动和间歇移动。
凸轮8通过四杆机构带动棘轮机构,棘轮机构带动螺旋机构使工作台连同工件在垂直纸面方向上做一次进给运动,以便刨刀继续切削。
图1 牛头刨床机构简图及阻力线图二、设计任务与要求(一)设计任务1、导杆机构的运动分析。
分析出刨头6的位移、速度、加速度运动曲线,并绘制上述各曲线图。
要求将过程详细地写在说明书中。
、2、凸轮机构设计。
根据所给定的已知参数,确定凸轮的基本尺寸(基圆半径ro 机架l O2O9和滚子半径r r),画出凸轮实际廓线并将运算结果写在说明书中。
3、根据牛头刨床的工作原理,拟定2~3个其他形式的执行机构(连杆机构),并对这些机构进行分析对比。
机械原理论文在机械原理研究中,标题的使用是非常重要的。
标题的设计应该精准地描述论文内容,吸引读者的兴趣并准确传达研究主题。
然而,您提出的要求是在文中不能有标题相同的文字,这是一个具有挑战性的要求,因为标题经常被用于引出论文的各个部分和段落。
为了满足您的需求,我将提供一个没有标题、但仍然能传达论文主题的示例:----------------------------------------------摘要本研究旨在探讨机械原理在xxx领域的应用。
通过分析xxx现象的原因和机制,我们提出了一种创新的解决方案以改善xxx的性能。
利用理论模型和实验方法,我们对该解决方案的可行性进行了验证。
结果显示,我们提出的方法在提高xxx方面取得了显著的效果。
此外,我们采用了领域之外的案例研究来验证该方法的适用性。
引言机械原理是一个关键的研究领域,它涉及各种力学和动力学原则的应用。
我们的研究旨在探索机械原理在xxx领域的潜在应用,以填补现有研究的空白。
我们的目标是提供一种新颖的方法来解决xxx问题,从而改善相关设备的性能。
方法我们首先对xxx进行深入的调查和分析,以了解其根本原因和影响因素。
基于这些结果,我们开发了一种新的机械原理模型,用于解决xxx问题。
该模型结合了xxx的特征和机械原理的基本原则,以提供准确而高效的解决方案。
我们还设计了一系列实验来验证模型的可行性,并进行了详细的数据分析。
结果通过实验和数值模拟,我们验证了我们提出的创新方法在改善xxx方面的有效性。
实验结果表明,在采用该方法后,xxx的性能提高了xx%,同时还降低了xxx的损耗。
此外,我们还通过与现有方法的比较研究,证明了我们提出的方法在效果上具有明显的优势。
讨论我们的研究结果表明,机械原理在xxx领域的应用具有巨大的潜力。
我们提出的方法不仅在理论上具有可行性,还在实际应用中展现了显著的效果。
进一步的研究可以探索更多机械原理的应用,并进一步改进我们的解决方案。
机械原理
综合训练(二)
题目:对偏置式曲柄滑块机构的分析
班级:机自15-1
姓名:卢浩
教师:席本强
2017年6月18日
对偏置式曲柄滑块机构的分析卢浩
(辽宁工程技术大学机械工程学院,辽宁阜新)
摘要:曲柄滑块机构的运功副为低副,各元件间为面接触,构成低副两元件的几何形状简单,加工得到较高的制造精度相对容易,因此在包括煤矿机械在内的各类机械中得到了广泛的应用,如冲床、剪床、内燃机以及空气压缩机等。
文章在总结前人研究成果的基础上,对曲柄滑块机构的传动特性分析进行了综述研究。
介绍曲柄滑块机构的运动特性,对现有的关于曲柄滑块机构特性分析方法进行了归纳与总结,主要包括有矢量法、函数法等。
关键词: 偏置式曲柄滑块机构; 运动分析;
0.引言
偏置曲柄滑块机构是由若干刚性构件使用低副( 回转副、移动副) 连接而成的一种机构,可用于将滑块的往复直线运动转换为曲柄的回转运动或者把曲柄回转运动变为滑块的直线往复运动。
由于其结构简单而工作可靠,且制造简易、能承受比较大的载荷,因此在工程实践中得到广泛的应用[1]。
1.偏置式曲柄滑块机构简介
1.1曲柄滑块机构的构成
用曲柄和滑块来实现转动和移动相互转换的平面连杆机构,也称曲柄连杆机构。
曲柄滑块机构中与机架构成移动副的构件为滑块,通过转动副A、B联接曲柄和滑块的构件为连杆。
机构运动时,如铰链中心B的轨迹不通过曲柄的转动中心OA,称为偏置曲柄滑块机构,其中e为偏距。
1.2偏置式曲柄滑块机构的应用
偏置式曲柄滑块机构是一种特殊的平面四杆机构,其主要优点是结构简单、制造方便、工作可靠。
对曲柄滑块机构进行运动特性分析有助于人们了解其机构特性偏置曲柄滑块机构的滑块具有急回特性,利用这一特性可以达到慢进和空程急回的目的。
其在机械设备中应用非常多,例如在冲床、剪床、内燃机以及空气压缩机等机械中均得到广泛应用。
2.函数法分析偏置式曲柄滑块机构的运动特性
图1-1 :偏置式曲柄滑块机构示意图
为了研究方便,建立如图1-1所示的坐标系。
曲柄长度为r2,连杆长度为r3,偏距为r,曲柄转角为θ2,连杆转角为θ3,则:
滑块的位移为:
r1= r2cosθ2+ r3cosθ3 (1)
将(1)式对时间t求导,得滑块速度为:
V=dr1/dt= -( r2sinθ2dθ2/dt+ r3sinθ3dθ3/dt)(2)
由图1 中y 方向几何关系得:
r2sinθ2= r3sinθ3+ r(3)
再将式( 3) 两边对时间t 求导得:
dθ3/dt=(dθ2/dt)·(r2cosθ2/r3cosθ3)(4)
曲柄旋转角速度为:
ω2=dθ2/dt(5)
将式(4)、式(5)代入式(2)得到:
v =dr1/dt= -r2ω2sin( θ2+ θ3)/cosθ3(6)
将式( 6) 对时间t 求导,得到滑块的加速度:
a =dv/dt=-r2ω2{cos(θ2+θ3)/cosθ3+(r2/r3)*(cos2θ2/cos3θ3)}(7)
综上所述:
从式( 1) 、式( 6) 和式( 7) 可以看出,滑块的位移、速度及加速度与曲柄的转速、曲柄的转角以及连杆的转角有关,且由式( 3) 可知连杆转角也是曲柄转角的函数。
因此,在曲柄、连杆和偏心距尺寸已知的条件下,滑块的位移、速度及加速度仅是曲柄转速的函数[2]。
3.矢量法建立偏置式曲柄滑块机构的运动模型
建立的偏置式曲柄滑块机构向量模型如图1-2所示。
图1-2:偏置式曲柄滑块坐标建立
其中,R1为滑块的位移,模为r1; R2为曲柄对应的向量,模为r2,转角为θ2; R3为连杆所对应的向量,模为r3,转角为θ3; R 为偏距,模为r。
偏置式曲柄滑块机构的闭环矢量方程为:
R2+ R3= R1+ R(8)
将此矢量方程分解到x 和y 轴上,得到:
r2cosθ2+ r3cosθ3= r1(9)
r2sinθ2+ r3sinθ3= r (10)将式(9) 、式(10) 对时间求导,得到偏置式曲柄滑块机构的速度方程:
-r2ω2sinθ2= r1->+ r3ω3sinθ3
-r2ω2cosθ2= r3ω3cosθ3
其中: r1->为矢量R1的大小变化率,是滑块相对于地面的平移速度;ω3为连杆的角速度。
以上分析得知,如果已知曲柄r2的角位置θ2、角速度ω2和连杆r3的角位置θ3,就可以根据式求出滑块相对于地面的平移速度r1->。
4.个人观点
偏置式曲柄滑块机构具有急回特性,机构急回特性在工程上的应用有三种情况:第一种情况是工作行程要求慢速前进,以利于切削,冲压等工作的进行,而回程时为节省空回时间,则要求快速返回,如牛头刨床,插床等就是如此,这是常见的情况。
第二种是对某些颚式破碎机,要求快速返回,使以被破碎的矿石能及时退出颚板,避免矿石的过粉碎(因破碎后的矿石有一定的粒度要求)。
第三种情况是一些设备在正、反行程中均在工作,故无急回要求。
此外,由K=(180°+θ)/(180°-θ),其中K为行程速度变化系数,θ为极位夹角。
即当机构存在极位夹角θ时,机构便具有急回特性,且θ角越大,K值越大,机构的急回运动性质也越显著。
因此,对于曲柄滑块的设计,应先确定行程速度变化系数K,求出θ后,在进行设计尺寸。
其中θ=180°(K-1)/(K+1)。
参考文献:
[1]靳岚,谢黎明,沈浩.基于Matlab的偏置曲柄滑块机构的运动特性仿真研究[J].中国制造业信息化,2008( 23).
[2]刘善林,胡鹏浩. 曲柄滑块机构的运动特性分析及仿真实现[J].机械设计与制造,2008,25( 5) : 79-80.。