电动车轮边驱动系统设计
- 格式:doc
- 大小:2.83 MB
- 文档页数:61
轮边后驱电动客车分布式驱动控制系统设计摘要:本文基于轮边后驱电动客车,设计了一种分布式驱动控制系统。
该系统采用了CAN总线通信技术,结合电池管理系统和电机驱动系统,对车辆的整体性能进行优化和协调控制,提高了车辆的动力性、能耗和安全性能。
其中,电池管理系统通过单体电压监测和均衡技术,实现了对动力电池组的可靠控制和管理。
电机驱动系统采用了随行控制策略,根据车速、加速度等参数进行动态控制,实现了最优化的动力输出和能量利用。
实验结果表明,该控制系统能够有效地解决现有后驱电动客车存在的热失控、能量浪费、动力输出不足等问题,提高了车辆的综合性能和市场竞争力。
关键词:后驱电动客车;分布式驱动控制系统;CAN总线通信;电池管理系统;电机驱动系统;随行控制策略1、引言近年来,随着环保、节能和新能源汽车政策的不断推进,电动客车成为了公交、物流、旅游等领域的主要交通工具。
与传统燃油客车相比,电动客车具有零排放、低噪音、低成本等优点,但也存在一些问题,如行驶里程不足、动力输出不足、能耗较高等。
因此,如何提高电动客车的综合性能和市场竞争力,成为了当前研究的热点和难点。
现有的电动客车主要分为前驱、后驱和全驱三种类型。
其中,后驱电动客车由于具有更好的动力输出和驾驶稳定性,受到了广大用户的青睐。
为了进一步提高后驱电动客车的性能,通过研究和实验,本文提出了一种分布式驱动控制系统,以实现对车辆整体性能的优化和协调控制。
2、系统设计2.1 总体架构分布式驱动控制系统的总体架构如图1所示。
其中,电池管理系统部分采用了BMS电池管理系统,通过单体电压监测、均衡等技术,对动力电池组的状态进行实时监测和控制;电机驱动系统部分采用了电机控制器,通过控制器内部的算法和随行控制策略,协调控制电机的输出和车速的匹配产生最优的动力输出;CAN总线负责连接各个控制单元,实现实时数据的传输与控制策略的调整。
同时为了提高系统的安全性和稳定性,还设计了车载网络和人机界面等功能模块,对整个系统进行优化和协调控制。

安徽工程大学机电学院本科毕业设计(论文)开题报告题目:电动汽车轮边驱动系统设计课题类型:设计***名:***学号: **********专业班级:车辆2103教学单位:机械与汽车工程学院***师:***开题时间: 2014.2 242014年 2月 24日一选题的依据和意义目前新兴汽车发展的前景看轮毂式电动汽车是新兴的一种电动汽车驱动形式。
轮毂式电驱动系统有直接驱动式电动轮和带轮边减速器电动轮两种基本形式。
它直接将电机安装在车轮轮毂中,省略了传统的离合器、变速箱、主减速器及差速器等部件,大大简化了整车结构,提高了传动效率,并且能通过控制技术实现对电动轮的电子差速控制。
并且在节能环保方面比现在燃烧燃料的普通汽车具有很大的优势。
我们国家在传统的汽车领域内目前还无法和国外的几乎任何产品比拼,因为我们国家的在传统的工业领域比国外起步晚得多,且在发展过程中曾经遭遇了困难。
目前新兴汽车产业在快速的发展,我们可以看到在新兴的汽车产业中,我国和外国发展的差距并不差的太远,就目前的对新型汽车的研究与发展可以说是几乎不落下风。
因此我们有信心在未来汽车发展的路途上尤其是在新兴汽车产业的发展上我国有能力赶上发达国家甚至处于领先地位,因为新兴能源汽车对全人类来说还并不是全能掌握目前都几乎还处在研发的地步。
因此我们对新兴能源汽车的关注度要提高。
这也可以使我国追赶外国在汽车产业方面的一个途径。
二国内外研究的现状和发展趋势国外著名汽车公司都十分重视研究开发电动汽车, 世界发达国家不惜投入巨资进行研究开发, 并制定了一些相关的政策、法规来推动电动汽车的发展。
目前国际上对轮毂式电动汽车的研究主要以日本为主。
日本庆应义塾大学环境信息学部清水浩教授领导的电动汽车研究小组在过去的十几年中已试制了5种不同形式的样车。
其中,1991年与东京电力公司共同开发的4座电动汽车IZA,采用Ni-Cd电池为动力源,以4个额定功率为6.8kW、峰值功率达到25kW的外转子式永磁同步轮毂电机驱动,最高速度可达176km/h。

专业资料目录摘要 (3)Abstract. (4)0文献综述 (5)0.1轮边驱动系统发展背景 (5)0.2轮边驱动系统国内外发展现状 (6)1引言 (7)2研究基本内容 (8)3轮边驱动系统方案设计 (8)3.1驱动系统方案选定 (9)3.2减速装置方案选定 (9)4轮边驱动系统齿轮传动设计 (12)4.1轮边减速器的传动啮合计算 (12)4.1.1确定齿轮满足条件,进行配齿计算 (12)4.1.2齿轮材料及热处理工艺的确定 (13)4.1.3齿轮配合模数m计算 (13)4.1.4几何尺寸计算 (15)4.1.5齿轮传动啮合要素计算 (15)4.1.6齿轮强度校核 (16)5轮边减速器行星齿轮传动的均载机构选取 (23)6各传动轴的结构设计与强度校核 (25)6.1电机轴设计 (25)6.2行星轴设计 (26)6.3输出轴设计 (27)7减速器润滑与密封 (27)8轮边驱动系统三维建模与仿真 (28)8.1驱动系统齿轮零件建模 (28)8.2行星架建模 (30)8.3壳体与端盖建模 (31)8.4总装配爆炸模型 (33)8.5轮边驱动系统运动仿真 (34)8.5.1运动仿真建模 (34)9总结 (36)参考文献 (37)致谢 (38)基于Pro/E的小型电动车轮边驱动系统设计与运动仿真摘要:电动汽车一般使用可再生能源,其能源多元化与高效化,在城市交通中,可以实现极低排放,甚至零排放。
目前电动车能源主要来自电力,在众多的驱动系统形式中,采用轮边减速驱动系统结构形式是目前的主要发展方向。
目前轮边驱动系统主要采用的是轮毂电机,这种电机成本较高,制造过程复杂,并且主要应用于大型电动轿车上,在小型电动车上采用结构简单的轮边驱动系统还较少,本文提出了由一级2K-H (NGW)型行星传动组成的小型电动汽车用轮边驱动系统,并按照齿根弯曲强度和齿面接触强度计算公式对各级齿轮进行了设计;对各级齿轮、轴、轴承等进行了强度和寿命校核;对行星架的结构、齿轮箱的结构进行设计,并根据设计结果画出小型电动汽车轮边驱动系统零件图和总装图。
轮边驱动系统的几种结构方案环保要求是电动汽车事业的推动力。
电动车辆作为“绿色交通”的载体,在资源与环境的和谐发展中发挥着越来越重要的作用。
目前电动车的驱动形式有多种,比如混合动力、纯电动等等,但是它们只是更换了动力源,汽车的传动系和行驶系并没有根本变化。
轮边驱动则不然,它是一种电动车辆的先进驱动方式,带来了电动车内部构造革命性的变化。
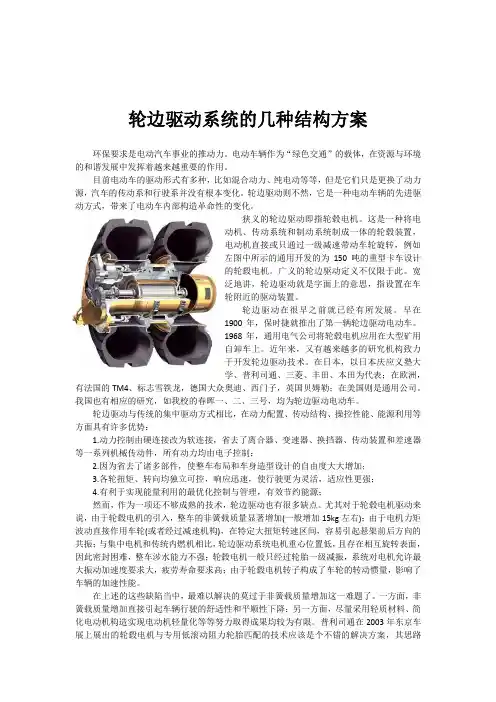
狭义的轮边驱动即指轮毂电机。
这是一种将电动机、传动系统和制动系统制成一体的轮毂装置,电动机直接或只通过一级减速带动车轮旋转,例如左图中所示的通用开发的为150吨的重型卡车设计的轮毂电机。
广义的轮边驱动定义不仅限于此。
宽泛地讲,轮边驱动就是字面上的意思,指设置在车轮附近的驱动装置。
轮边驱动在很早之前就已经有所发展。
早在1900年,保时捷就推出了第一辆轮边驱动电动车。
1968年,通用电气公司将轮毂电机应用在大型矿用自卸车上。
近年来,又有越来越多的研究机构致力于开发轮边驱动技术。
在日本,以日本庆应义塾大学、普利司通、三菱、丰田、本田为代表;在欧洲,有法国的TM4、标志雪铁龙,德国大众奥迪、西门子,英国贝姆勒;在美国则是通用公司。
我国也有相应的研究,如我校的春晖一、二、三号,均为轮边驱动电动车。
轮边驱动与传统的集中驱动方式相比,在动力配置、传动结构、操控性能、能源利用等方面具有许多优势:1.动力控制由硬连接改为软连接,省去了离合器、变速器、换挡器、传动装置和差速器等一系列机械传动件,所有动力均由电子控制;2.因为省去了诸多部件,使整车布局和车身造型设计的自由度大大增加;3.各轮扭矩、转向均独立可控,响应迅速,使行驶更为灵活,适应性更强;4.有利于实现能量利用的最优化控制与管理,有效节约能源;然而,作为一项还不够成熟的技术,轮边驱动也有很多缺点。
尤其对于轮毂电机驱动来说,由于轮毂电机的引入,整车的非簧载质量显著增加(一般增加15kg左右);由于电机力矩波动直接作用车轮(或者经过减速机构),在特定大扭矩转速区间,容易引起悬架前后方向的共振;与集中电机和传统内燃机相比,轮边驱动系统电机重心位置低,且存在相互旋转表面,因此密封困难,整车涉水能力不强;轮毂电机一般只经过轮胎一级减振,系统对电机允许最大振动加速度要求大,疲劳寿命要求高;由于轮毂电机转子构成了车轮的转动惯量,影响了车辆的加速性能。
摘要随着能源危机的日益严重以及人们环保意识的不断增强,研究开发清洁、节能和安全的汽车成为汽车工业发展的方向。
其中电动汽车具有行驶过程中零排放、能源利用多元化和高效化以及方便实现智能等优点,使之成为新型汽车研发的重点之一。
本文以减速型电动轮驱动电动汽车的优势为出发点,设计了利于电动汽车使用减速型电动轮的轮边减速装置,对轮边减速器的结构进行了设计、研究,增强了电机内转子驱动型电动轮在电动汽车上的应用能力。
以行星齿轮系为轮边减速器的减速传动形式,在减速传动链的设计中,引入了均载设计来提升行星齿轮传动的优势;出于减小轮边减速器的重量及体积、节省材料的目的,对轮边减速器的行星传动系统进行了以体积为目标的优化设计;为便于制动装置及轮毂与轮边减速器安装,设计了轮毂支承件,在满足功能的同时也减少了零件数目;轮边减速器桥壳的巧妙设计使减速器及其轮毂支承件的安装变得更容易、受力也更合理,为前后轮悬架导向机构、转向拉杆及横向稳定杆提供了支点,更进一步保证所设计的轮边减速器能够精确地实现与电动汽车其它零部件的安装及联接, 保证所设计的轮边减速器满足整车行驶工况要求。
关键词:轮边减速器;电动汽车;电动轮;行星齿轮减速器;电动机ABSTRACTWith improving environmental protection consciousness and the serious energy crisis,to research and develop the clear, energy-saving and safe auto become the new direction of development of automobile industry. Electric vehicle, which has much advantages, such as no emission, pluralism and high-efficient of energy utilization, and conveniently realizing intelligence erc, is about to become one of the focal points in researching and developing new—type automobile.The design and research takes a wheel reduction unit applied on reduced wheel-drive electric vehicle as the subjective.Research for the type of structure has been done in this thesis which will contribute to the application capability of reduced electric wheel.Load balancing structure is introduced into the drive line design of the planetary wheel reducer to fulfill the advantage of planetary transmission.In order to decrease weight and volume as well as save to material,the researcher optimized the volume of the planetary transmission.For easy to assemble the break system and the wheel--hub while reducing components number, a connection supporting part is designed.The most particular design is the transmission housing with pivots for assembling the upper and lower control arm,the stabilizer as well as the steering linkage.Optimization of the suspension, steering system and stabilizer bar has made for assembling the wheel reducer more accurate,then the optimization result feedbacks to modify the reducer design .For the purpose of guaranteeing the strength of the wheel reducer in work.Key words: Wheel Reducer;Electric Vehicle;Electric Wheel;Planetary Gear Reducer;Electric Motor目录摘要 (I)Abstract.............................................................................................................. I I 第1章绪论. (1)1.1课题的来源和背景 (1)1.2国内外研究现状 (2)1.3本文的研究思路与内容 (6)第2章轮边减速器设计 (7)2.1电动轮的类型及选择 (7)2.2轮边减速器的传动方案 (10)2.3本章小结 (17)第3章轮边驱动的参数确定及关键零部件的设计 (18)3.1驱动电机性能参数的确定 (18)3.1.1整车性能要求 (18)3.1.2驱动电机参数计算(两轮驱动) (18)3.2减速器关键零部件的设计 (21)3.2.1行星齿轮传动齿数分配应满足的条件 (21)3.2.2齿轮受力分析和强度设计计算 (23)3.2.3齿面接触强度的校核计算 (24)3.2.4其他相关零部件的设计计算 (28)3.3轮边减速器的润滑 (32)3.4轮边减速器零部件之间的装配关系 (32)3.5本章小结 (33)第4章行星齿轮传动的传动结构的设计 (34)4.1行星齿轮传动的均载机构 (34)4.2行星齿轮传动的齿轮结构设计 (35)4.3本章小结 (38)结论 (39)参考文献 (40)致谢 (41)附录A (42)附录B (46)第1章绪论1.1 课题的来源和背景随着汽车工业的高速发展,全球汽车总保有量不断增加,汽车所带来的环境污染、能源短缺,资源枯竭等方面的问题越来越突出。
电动汽车轮毂驱动系统的研究与设计随着环保信念的不断增强,汽车行业逐渐向着新能源方向发展。
其中,电动汽车因其零排放、高效节能等特点,成为当下最受瞩目的汽车类型之一。
然而,电动汽车轮毂驱动系统作为其核心技术之一,目前仍存在一定的问题和挑战。
本文将探讨电动汽车轮毂驱动系统的研究与设计,旨在展示其未来发展的潜力和方向。
一、电动汽车轮毂驱动系统简介电动汽车轮毂驱动系统是指电动汽车电机直接安装在轮毂上进行传动的一种技术。
相比于传统的中央驱动系统,轮毂驱动系统具有结构简单、节能环保等优点,被视为电动汽车未来的主流技术。
其核心就是将电力部分直接安装在车轮上,利用高扭矩、高效能的电动机通过减速器和差速器连接后驱动轮毂,保证车辆的动力输出。
同时,这种结构还能带来更少的动力传递损耗和更大的可靠性。
二、电动汽车轮毂驱动系统的优缺点1、优点(1)高效:传统的中央驱动系统要通过传动轴传递动力,因此存在传动损耗和能量损失。
而轮毂驱动系统由电机直接驱动,不存在轴传递阻力,因此具有更高的能量利用效率。
(2)静音:由于该系统无需使用变速器,因此传动部分减少,从而减少了噪声产生的机会。
同时,电动汽车本身噪音就比较小,因此轮毂驱动系统带来的静音驾驶体验更好。
(3)解决空间占用问题:传统的中央驱动系统要占据车身一定的空间。
而轮毂驱动系统直接安装在车轮上,因此不会占据车身内部空间,从而降低了车身高度,让底盘设计更加灵活。
(4)让车辆更加紧凑:同样一个车辆,在轮毂驱动系统的情况下需要的零部件较少,最终的车辆在体积上会更紧凑,车重更轻,灵活性更高。
2、缺点(1)扭力和速度:目前的轮毂驱动系统无法像中央驱动系统那样精确控制扭力和速度,这导致了在驾驶舒适度、燃效、加速和制动等方面无法达到优秀的表现。
(2)失控:轮毂电机通常会配备电刹和电动差速器,但是它们仍然存在失控的安全隐患。
为了达到安全的驾驶体验,需要继续优化控制算法。
(3)制造力量的不足:制造商需要具备更多的专业技能,用于合理地设计可以承受电机和制动器等大部件的轮毂。
轮边驱动电动车车轮设计与研究文章提出了一种新的基于线控技术的轮边驱动电动车车轮结构,为验证结构的可行性,利用ADAMS/Car仿真软件中建立整车动力学仿真模型并进行脉冲路面和随机路面的仿真。
通过分析车身振动的加权加速度均方根值,判断振动的频率是否在人体对振动可接受的范围内验证其可行性。
经过仿真结果和数据得出本文提出的车轮结构能提高整车平顺性。
标签:轮边驱动;ADAMS;加权加速度均方根值;平顺性引言电动车作为最有前景的新能源汽车正逐渐成为人们最为便捷的交通工具。
轮边驱动电动车以其紧凑简单的结构、高效的传动效率得到各大汽车企业的青睐[1]。
轮边驱动轮毂电机主动车轮集成了悬架、电机、阻尼器、制动和转向等功能,实现了电动车紧凑结构设计的同时也加大了整车的簧载质量和车轮动载荷,从而增大了车身的垂直加速度,因此恶化了整车的平顺性和操纵稳定性。
另一方面,路面等级和汽车行驶速度的不同也会不同程度地影响车身的振动。
机械振动的频率、强度、方向和时间也会受人的感受的影响。
本文利用平顺性最基本的评价方法加权加速度均方根值来验证轮边驱动主动车轮是否符合GB/T4970-《汽车平顺性随机输入行驶试验方法》。
1 轮毂电机主动车轮的提出本文提出的主动车轮基于米其林轮毂电机车轮结构,驱动扭矩从牵引电机经齿轮减速传递到轮毂上,比起直接驱动发动机,这种结构可以在更高角速度下输出最大的扭矩,结构设计更为紧凑。
主动悬架可以根据汽车实际的行驶状况动态自适应调整悬架系统的阻尼特性和刚度,以便更好地减振。
本文结合米其林主动车轮,根据需要实现的车轮功能,提出了一种新的轮边驱动轮毂电机主动车轮:车轮集成了驱动轮毂电机、制动、转向、悬架、阻尼等基本功能,用线性旋转电动马达控制偏转运动。
轮毂集成与安装在轮架上的小齿轮啮合的齿轮,电机控制小齿轮的运作,电机定子与轮架集成,转子通过直接啮合带动小齿轮,将扭矩传递给轮毂。
车轮内部有中心布置的截面为矩形的转向杆,由四个滚道组成,增大悬架行程,转向杆和转向件之间的平移运动完成悬架的功能。
电动两轮车驱动系统解决方案引言概述:随着社会的发展和科技的进步,电动两轮车已经成为人们生活中常见的出行工具。
而电动两轮车的驱动系统作为其核心部件,直接影响了车辆的性能和稳定性。
因此,对于电动两轮车的驱动系统解决方案的研究和优化显得尤其重要。
一、电动两轮车驱动系统的基本原理1.1 电动两轮车驱动系统的组成电动两轮车的驱动系统主要由机电、控制器、电池和传动系统组成。
机电负责提供动力,控制器控制机电的运行,电池提供电能,传动系统将机电的动力传递到车轮上。
1.2 电动两轮车驱动系统的工作原理电动两轮车的驱动系统工作原理是通过控制器对机电进行控制,调节机电的转速和扭矩,从而驱动车辆前进或者后退。
电池提供电能给机电,传动系统将机电的动力传递到车轮上,实现车辆的运动。
1.3 电动两轮车驱动系统的优势与传统燃油车相比,电动两轮车的驱动系统具有零排放、低噪音、低成本等优势。
同时,电动两轮车的驱动系统更加简洁、高效,提高了车辆的性能和稳定性。
二、电动两轮车驱动系统的技术难点2.1 机电的控制技术电动两轮车的机电控制技术是其驱动系统的核心。
如何实现机电的高效率、高性能、低成本是机电控制技术的难点之一。
2.2 电池管理系统电池是电动两轮车的能量来源,如何实现电池的高效率、长寿命、安全可靠是电池管理系统的难点之一。
2.3 传动系统设计传动系统是将机电的动力传递到车轮上的关键部件,如何设计出高效、轻量、低噪音的传动系统是技术难点之一。
三、电动两轮车驱动系统的解决方案3.1 机电控制技术的优化通过采用先进的机电控制算法和硬件设计,提高机电的效率和性能,实现机电的精准控制,提高车辆的动力性和节能性。
3.2 电池管理系统的改进采用智能化的电池管理系统,实现对电池的监控、充放电控制、温度管理等功能,延长电池的使用寿命,提高电池的安全性和稳定性。
3.3 传动系统的优化设计通过采用轻量化材料、精密创造工艺和减少传动系统的磨擦损失,提高传动效率,减少能量损耗,提高车辆的行驶里程和加速性能。
电动车驱动系统的设计与优化电动车作为一种环保、低能耗的交通工具,越来越受到人们的关注和喜爱。
而其中一个核心的技术就是电动车的驱动系统。
本文将探讨电动车驱动系统的设计与优化,帮助读者了解该系统的原理和优化方法。
1. 电动车驱动系统的构成电动车驱动系统主要由电动机、电池组、控制器、传动装置和辅助电子设备等组成。
电动机是电动车的动力源,电池组提供能量;控制器控制电池组的放电和充电过程,以及控制电动机的运行;传动装置用于将电动机的动力传递到车轮上;辅助电子设备包括仪表、灯光、音响等。
2. 电动车驱动系统设计的考虑因素电动车驱动系统的设计需要综合考虑以下几个因素:a. 动力需求:电动车在不同用途下的动力需求不同,例如城市通勤、行驶在山区或高速公路等。
因此,需要根据不同的动力需求选择合适的电动机和电池组,并确保整个系统能够满足相应的动力要求。
b. 能量管理:电动车的电池组是影响续航里程的关键。
为了提高电动车的续航里程,需要对电池组的充电和放电进行精确管理,以提高能量的利用效率和延长电池的使用寿命。
c. 系统效率:在电能转换过程中存在能量损失,例如电动机的损耗、传动装置的能量损耗等。
因此,需要通过系统的优化设计,尽量减少能量损失,提高整个系统的效率。
d. 系统的稳定性与可靠性:电动车驱动系统的稳定性与可靠性对车辆的安全性和用户的体验至关重要。
在设计中需要考虑各个组件的匹配性、系统的故障检测与保护等。
3. 电动车驱动系统的优化方法为了提高电动车的性能和使用体验,可以通过以下几种方式对驱动系统进行优化:a. 电机选型与匹配:选择合适的电动机型号,并对电动机进行匹配。
根据动力需求和车辆负载,选择适当的电动机转矩和功率输出,以提高系统的效率和动力性能。
b. 电池组管理系统优化:通过改进电池管理系统,实现对电池组的智能充放电控制,改善能量利用效率,延长电池的使用寿命。
c. 传动装置设计改进:通过优化传动装置的传动比、减少传动损耗等方式,提高整个系统的效率,并降低驱动系统的噪音和震动。
电动车轮边驱动系统设计随着人们对环境保护和能源的重视,在城市出行中电动车越来越受欢迎。
电动车的核心部件之一就是轮边驱动系统,它对电动车的性能和驾驶体验有很大的影响。
本文将介绍电动车轮边驱动系统的设计原理和应用。
一、电动车轮边驱动系统的设计原理电动车轮边驱动系统主要由电机、电控系统和轮毂组成。
这三部分将结合起来以实现电动车行驶的动力控制。
具体包括以下几个方面的设计原理:1.电机选择和设计电动车的驱动电机有很多种选择,如直流电机、异步电机和永磁电机等。
其中,永磁电机由于其高效、小型化、轻量化等特点已成为电动车的主要选择。
在电机的设计中,需要考虑电机的功率、效率和转矩等因素,以充分发挥电驱动的优势。
2.电控系统设计电动车的电控系统通常包括电池管理系统、电机驱动器和控制器等。
电池管理系统主要负责电池的充放电控制和管理,以确保电池的安全和寿命。
而电机驱动器和控制器则负责电机的转速和转矩控制,以实现平稳加速和刹车,提高电动车行驶的安全性和舒适性。
3.轮毂的设计轮毂是电动车轮边驱动系统的主要零部件之一,负责电机转速的传递和力量的传导。
轮毂需要具备高强度、低重量和良好的耐磨损性等优点。
同时,为了提高电动车的效率和性能,轮毂还需要具备良好的散热和噪音控制性能。
二、电动车轮边驱动系统的应用电动车轮边驱动系统广泛应用于城市出行中,如电动自行车、电动摩托车和电动汽车等。
这里以电动汽车为例,介绍其轮边驱动系统的应用。
1.提高行驶的舒适性和安全性电动车轮边驱动系统能够实现电机转速和转矩的平稳控制,使电动车在启动、行驶和刹车时都能够保持平稳和舒适,提高了行驶的舒适性。
此外,电动车的轮边驱动系统还能够实现动态调节力矩,确保电动车在发生危险情况时能够及时刹车,提高行驶的安全性能。
2.降低能耗和排放电动车轮边驱动系统开启之后,由于传动链条的简化,能够减少能量的损耗,从而降低电动车的能耗和排放。
与传统的六速变速器相比,电动车的轮边驱动系统的效率要高出很多,大概能够达到90%以上的转换效率。
电动车辆驱动系统设计与优化随着人们对环保理念的不断加强,越来越多的人选择使用电动车辆代替传统的燃油汽车。
深入探究电动车辆驱动系统的设计与优化,对推进电动车辆的发展具有重要的意义。
本文将从电动车辆驱动系统的组成、性能指标和优化方向三个方面,对车辆进行分析和研究。
一、电动车辆驱动系统组成电动车辆驱动系统由电机、电控系统和电池三部分组成。
其中电机是驱动轮胎转动的核心部件,电控系统是调整电机输出功率、控制电机转向、监控电池状态的核心部件,电池则提供电能。
电机是电动车辆驱动系统最核心的部件之一,其性能决定着车辆的驱动性能。
目前市面上主要有磁钢电机和无刷电机两种类型,无刷电机在车辆驱动过程中更加高效、可靠。
同时,电机的功率、扭矩和转速等性能指标也是决定车辆驱动性能的重要因素。
电控系统则负责管理电机输出功率、控制电机转向和监控电池状态等方面。
电控系统的性能关系到车辆的驱动效率、安全性和稳定性。
其中,电机控制器是电控系统的核心组成部分,其可调节均衡电机相位,从而实现电机的正转、反转和调速等功能。
电池负责储存电能,是电动车辆驱动系统的重要组成部分。
目前市面上主要有铅酸电池、镍镉电池、锂离子电池等几种类型。
锂离子电池因其轻量、高能量密度、长寿命等优点,在电动车辆中的应用越来越广泛。
二、电动车辆驱动系统的性能指标电动车辆驱动系统的主要性能指标有电机功率、扭矩和转速等,还包括电池容量、续航里程和充电时间等方面。
电机功率是衡量电机输出能力的重要指标。
通常,电动车辆的电机功率越大,则其加速能力越快,最高速度也会更高。
同时,电机功率的提高还有利于车辆在爬坡等工况下获得更好的动力性能。
电机扭矩则衡量了电机的最大牵引力,也是车辆驱动系统中的重要性能指标。
电机扭矩越大,车辆启动、加速、爬坡等工况下的动力性能也会越好。
电机转速也是电动车辆驱动系统的重要性能指标。
电机转速越高,车辆最高速度也会越高。
同时,电机的转速还直接影响着电机的效率和噪音等方面。
任务书开题报告动机。
将电动机转子外壳直接与轮毂相连,将电动机外壳作为车轮的组成部分,并且电动机转子外壳集成为鼓式制动器的制动鼓,制动蹄片直接作用在电动机外壳上,省去制动鼓的结构,减轻了电动轮系统的质量.集成化设计程度相当高,电动轮结构如图 0.4所示。
TM4公司研制的这个电动轮系统的永磁无刷直流电动机性能非常高,其峰值功率可咀达到80kw,峰值扭矩为670Nm.最高转速为1385rpm,额定功率为18.5kw.额定转速为950rpm,额定工况下的平均效率可以达到96.3%。
国内,哈尔滨工业大学一爱英斯电动汽车研究所研制开发的EV96-1型电动汽车驱动电动轮也属于外转予型电动机。
该电动机选用的是一种“多态电动机”的永磁电动机,兼有同步电动机和异步电动机的双重特性,集成盘式制动嚣,采用风净敖热系统。
同济大学汽车学院试制的四轮驱动电动汽车“春晖一号”、“春晖二号一和“春晖三号"均采用四个直流无刷轮毂电动机,外置式盘式制动器。
比亚迪于2004年在北京车展上展出的ET概念车也采用了4个轮边电机独立驱动的模式。
中国科学院北京三环通用电气公司研制的电动轿车用直流无刷轮毂电机,又称电动车轮。
单个电动车轮功率为7.5kW,电压264V,双后轮直接驱动。
国内,哈尔滨工业大学一爱英斯电动汽车研究所研制开发的EV96-1型电动汽车驱动电动轮也属于外转予型电动机。
该电动机选用的是一种“多态电动机”的永磁电动机,兼有同步电动机和异步电动机的双重特性,集成盘式制动嚣,采用风净敖热系统。
同济大学汽车学院试制的四轮驱动电动汽车“春晖一号”、“春晖二号一和“春晖三号"均采用四个直流无刷轮毂电动机,外置式盘式制动器。
比亚迪于2004年在北京车展上展出的ET概念车也采用了4个轮边电机独立驱动的模式。
中国科学院北京三环通用电气公司研制的电动轿车用直流无刷轮毂电机,又称电动车轮。
单个电动车轮功率为7.5kW,电压264V,双后轮直接驱动。
图 0.1KAZ电动汽车图 0.2 Eliica电动汽车图 0.3 Eliica电动汽车图 0.4 TM4一电动轮系统本文研究所应用的减速驱动型电动轮,需要合适的减速器作为电动轮的减速装置。
原则上既可以选择可变速比齿轮减速器,也可以选择固定速比齿轮减速器。
虽然可变速比齿轮减速器传动具有以下优点:应用常规驱动电动机系统可以在低档位得到较高的启动转矩,在高档位得到较高的行驶速度,但是缺点就是体积大、质量大、成本高、可靠性低、结构复杂。
实际上,现在所有电动车都采用了固定速比齿轮变速器作为减速装置。
并把安装在电动轮轮毂内的定减速比减速器称为轮边减速器(Wheel Reducer)。
带轮边减速器电动轮电驱动系统能适应现代高性能电动汽车的运行要求。
轮边减速器将动力从原动机(此研究中即为轮毂驱动电机)直接传递给车轮,其主要功能是降低转速、增加转矩,从而使原动机的输出动力能够满足电动轿车的行车动力需求。
按照齿轮及其布置型式,轮边减速器有行星齿轮式及普通圆柱齿轮式两种结构。
这两种结构形式在工程中都已有成功应用,例如在奥地利微型越野汽车“Steyr-puch Haflinger"的断开式后驱动桥中就采用了普通圆柱齿轮式轮边减速器;在某些双层公交汽车的驱动桥中,为了降低车厢与地板的高度,有时也采用普通圆柱齿轮式轮边减速器作为汽车的第二级减速装置;日本开发的轻型轮式电机电动汽车Luciole,采用的是内转子高速无刷直流电动机.行星齿轮-鼓式制动器的驱动系统,也应用了轮边减速器;“太脱拉111R”重型汽车的贯通式中桥、法国索玛MTP型自卸汽车、斯太尔汽车后驱动桥等都采用了行星齿轮式轮边减速器;在电动汽车领域,在轮边减速器的应用上,主要以日本应庆大学开发研制的八轮轮边驱动电动汽车“KAZ”最为成功,为了使得电动机输出转速符合实际转速要求,KAZ的电动轮系统配置了一个传动比为4.588的行星齿轮减速器,图 0.5为KAZ的前、后电动轮系统的结构图,从图中可以看见行星减速器为传动主题的轮边减速装置。
(a)前轮(b)后轮图 0.5 KAZ电动轮系统结构图设计一种微型电动车用的轮边减速器,是为电动汽车的轮边驱动系统使用,工作力矩较小,但因没有主减速器而需要更大的减速比。
大型车辆的轮边减速器的结构型式可以为电动汽车的轮边减速器提供参考,缩小结构尺寸,而增大减速比,满足轮边驱动系统的使用要求。
二、设计(论文)的基本内容、拟解决的主要问题(一)主要设计内容行星齿轮减速器齿轮几何尺寸计算、减速器各级齿轮的校核、轴承选取及寿命计算、轴的设计、箱体设计。
第2章轮边减速器设计2.1 电动轮的类型及选择2.2 轮边减速器的传动方案第3章轮边驱动的参数确定及关键零部件的设计3.1 驱动电机性能参数的确定3.2 减速器关键零部件的设计3.3 轮边减速器的润滑3.4 轮边减速器零部件之间的装配关系第4章行星齿轮传动的传动结构的设计4.1 行星齿轮传动的均载机构4.2 行星齿轮传动的齿轮结构设计摘要随着能源危机的日益严重以及人们环保意识的不断增强,研究开发清洁、节能和安全的汽车成为汽车工业发展的方向。
其中电动汽车具有行驶过程中零排放、能源利用多元化和高效化以及方便实现智能等优点,使之成为新型汽车研发的重点之一。
本文以减速型电动轮驱动电动汽车的优势为出发点,设计了利于电动汽车使用减速型电动轮的轮边减速装置,对轮边减速器的结构进行了设计、研究,增强了电机内转子驱动型电动轮在电动汽车上的应用能力。
以行星齿轮系为轮边减速器的减速传动形式,在减速传动链的设计中,引入了均载设计来提升行星齿轮传动的优势;出于减小轮边减速器的重量及体积、节省材料的目的,对轮边减速器的行星传动系统进行了以体积为目标的优化设计;为便于制动装置及轮毂与轮边减速器安装,设计了轮毂支承件,在满足功能的同时也减少了零件数目;轮边减速器桥壳的巧妙设计使减速器及其轮毂支承件的安装变得更容易、受力也更合理,为前后轮悬架导向机构、转向拉杆及横向稳定杆提供了支点,更进一步保证所设计的轮边减速器能够精确地实现与电动汽车其它零部件的安装及联接, 保证所设计的轮边减速器满足整车行驶工况要求。
关键词:轮边减速器;电动汽车;电动轮;行星齿轮减速器;电动机ABSTRACTWith improving environmental protection consciousness and the serious energy crisis,to research and develop the clear, energy-saving and safe auto become the new direction of development of automobile industry. Electric vehicle, which has much advantages, such as no emission, pluralism and high-efficient of energy utilization, and conveniently realizing intelligence erc, is about to become one of the focal points in researching and developing new—type automobile.The design and research takes a wheel reduction unit applied on reduced wheel-drive electric vehicle as the subjective.Research for the type of structure has been done in this thesis which will contribute to the application capability of reduced electric wheel.Load balancing structure is introduced into the drive line design of the planetary wheel reducer to fulfill the advantage of planetary transmission.In order to decrease weight and volume as well as save to material,the researcher optimized the volume of the planetary transmission.For easy to assemble the break system and the wheel--hub while reducing components number, a connection supporting part is designed.The most particular design is the transmission housing with pivots for assembling the upper and lower control arm,the stabilizer as well as the steering linkage.Optimization of the suspension, steering system and stabilizer bar has made for assembling the wheel reducer more accurate,then the optimization result feedbacks to modify the reducer design .For the purpose of guaranteeing the strength of the wheel reducer in work.Key words: Wheel Reducer;Electric Vehicle;Electric Wheel;Planetary Gear Reducer;Electric Motor目录摘要 (IX)Abstract.............................................................................................................. I I 第1章绪论. (1)1.1 课题的来源和背景 (1)1.2 国内外研究现状 (2)1.3 本文的研究思路与内容 (6)第2章轮边减速器设计 (7)2.1 电动轮的类型及选择 (7)2.2 轮边减速器的传动方案 (10)2.3 本章小结 (17)第3章轮边驱动的参数确定及关键零部件的设计 (18)3.1 驱动电机性能参数的确定 (18)3.1.1 整车性能要求 (18)3.1.2 驱动电机参数计算(两轮驱动) (18)3.2 减速器关键零部件的设计 (21)3.2.1 行星齿轮传动齿数分配应满足的条件 (21)3.2.2 齿轮受力分析和强度设计计算 (23)3.2.3 齿面接触强度的校核计算 (24)3.2.4 其他相关零部件的设计计算 (28)3.3 轮边减速器的润滑 (32)3.4 轮边减速器零部件之间的装配关系 (32)3.5 本章小结 (33)第4章行星齿轮传动的传动结构的设计 (34)4.1 行星齿轮传动的均载机构 (34)4.2 行星齿轮传动的齿轮结构设计 (35)4.3 本章小结 (38)结论 (39)参考文献 (40)致谢 (41)附录A (42)附录B (46)第1章绪论1.1 课题的来源和背景随着汽车工业的高速发展,全球汽车总保有量不断增加,汽车所带来的环境污染、能源短缺,资源枯竭等方面的问题越来越突出。