基于Simulink的曲柄导杆移动从动件平面六杆机构的运动分析
- 格式:pdf
- 大小:151.53 KB
- 文档页数:3
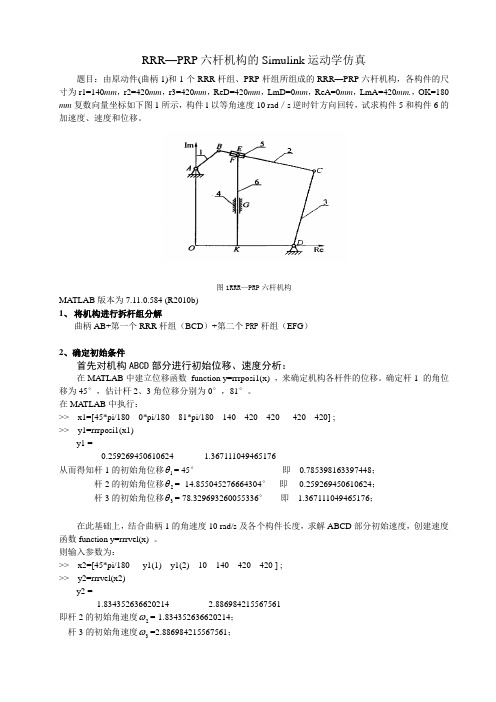
RRR—PRP六杆机构的Simulink运动学仿真题目:由原动件(曲柄1)和1个RRR杆组、PRP杆组所组成的RRR—PRP六杆机构,各构件的尺寸为r1=140mm,r2=420mm,r3=420mm,ReD=420mm,LmD=0mm,ReA=0mm,LmA=420mm.,OK=180 mm复数向量坐标如下图1所示,构件l以等角速度10 rad/s逆时针方向回转,试求构件5和构件6的加速度、速度和位移。
图1RRR—PRP六杆机构MA TLAB版本为7.11.0.584 (R2010b)1、将机构进行拆杆组分解曲柄AB+第一个RRR杆组(BCD)+第二个PRP杆组(EFG)2、确定初始条件首先对机构ABCD部分进行初始位移、速度分析:在MA TLAB中建立位移函数function y=rrrposi1(x) ,来确定机构各杆件的位移。
确定杆1 的角位移为45°,估计杆2、3角位移分别为0°,81°。
在MA TLAB中执行:>> x1=[45*pi/180 0*pi/180 81*pi/180 140 420 420 420 420] ;>> y1=rrrposi1(x1)y1 =-0.259269450610624 1.367111049465176θ= 45°即0.785398163397448;从而得知杆1的初始角位移1θ= -14.855045276664304°即-0.259269450610624;杆2的初始角位移2θ= 78.329693260055336°即 1.367111049465176;杆3的初始角位移3在此基础上,结合曲柄1的角速度10 rad/s及各个构件长度,求解ABCD部分初始速度,创建速度函数function y=rrrvel(x) 。
则输入参数为:>> x2=[45*pi/180 y1(1) y1(2) 10 140 420 420 ] ;>> y2=rrrvel(x2)y2 =-1.834352636620214 2.886984215567561ω=-1.834352636620214;即杆2的初始角速度2ω=2.886984215567561;杆3的初始角速度3对机构EFG部分进行初始位移、速度分析:构件5的位移:>> s5=(0.18-0.14*cos(45*pi/180))/cos(-y1(1))s5 =0.083806056003369即构件5的位移s5= 0.083806056003369构件6的位移:>> s6=0.42+0.14*sin(45*pi/180)-(0.18-0.14*cos(45*pi/180))*tan(-y1(1)) s6 =0.497509214688385即构件6的位移s6= 0.497509214688385通过SolidWorks 2009 软件建立平面机构来分析速度构件5的速度:>> v5=-y2(1)*0.72475802426v5 =1.329461792712988>> v55=v5*sin(50.73886275*pi/180)v55 =1.029361907794855>> v555=v55/cos(y1(1)*pi/180)v555 =1.064955345590595即构件5的速度ds5= 1.064955345590595构件6的速度:>> v6=v5*sin(24.40609198*pi/180)v6 =0.549335282591239>> v66=0.549335282591239/cos(y1(1)*pi/180)v66 =0.568330284312065 即构件6的速度ds6= 0.5683302843120653、建立Simulink仿真模型图2 RRR—PRP六杆机构Simulink仿真模型RRR—PRP六杆机构Simulink仿真模型如上图2所示,共有3个MA TLAB函数模块。

[研究・设计]收稿日期:2007204209作者简介:赵小刚(1981-),男,陕西户县人,助教,主要研究方向为机械工程CAD CAM 。
MA TLAB S i m ulink 软件的曲柄导杆机构运动学仿真赵小刚1,李永春2 (1.陕西国防工业职业技术学院机械系,陕西户县 710302; 2.陕西科技大学机电工程学院,陕西西安 710021) 摘 要:为了求解曲柄导杆机构的运动学规律,运用矢量法进行了分析,建立了曲柄导杆机构的运动学数学模型。
使用M A TLAB Si m ulink 仿真软件对曲柄导杆机构进行了运动学仿真,得到了导杆及滑块的位移、速度、加速度的运动曲线。
使用这种方法求解机构的运动学参数具有精度高、速度快等特点。
关 键 词:曲柄导杆机构;运动学;M A TLAB Si m ulink 软件;仿真中图分类号:TH 112;T P 391.9 文献标志码:A 文章编号:100522895(2007)06200392030 引 言曲柄导杆机构是一种应用比较广泛的平面连杆机构,它可以将曲柄的旋转运动转换成为导杆的往复摆动(摆动导杆机构)或整周旋转运动(转动导杆机构)[1]。
曲柄导杆机构还可以与别的基本四杆机构组合在一起,构成一些实用的组合机构,如刨床,车床的主运动机构等。
机构的运动参数是分析评价机构工作性图1 曲柄摆动导杆机构简图能,优化新机构的基本依据[2]。
对曲柄导杆机构的运动分析,即构件上特定点的位移、速度和加速度分析,常用的方法有图解法和解析法。
图解法较直观、方便,但是精度不高,需要反复作图;而解析法人工计算运算量大,容易出错[3]。
本文以曲柄摆动导杆为例,提出用M A TLAB 软件仿真工具箱Si m u link 对曲柄导杆机构进行运动学仿真,得到曲柄导杆机构的运动曲线,该方法使解析法获得更高的精度。
1 曲柄摆动导杆机构运动学数学模型的建立图1所示为一曲柄摆动导杆机构,曲柄OA 为原动件,导杆B A 是从动件,通过滑块,曲柄的连续转动转变为导杆的往复摆动。

实验四 基于Simulink 机构运动分析学号 姓名一、实验任务和目的1. 熟悉Simulink 的工作环境,掌握模型建立方法。
2. 熟悉和掌握模块参数的设置和常用模块的使用方法。
3. 掌握利用Simulink 实现机构运动仿真的方法。
二、实验内容1、 已知图示曲柄滑块机构中,曲柄L AB =a=50mm ,连杆L BC =b=100mm ,偏心距e=20mm ,曲柄逆时针匀角速度ω=2rad/s 转动。
xx图1 曲柄滑块机构该曲柄滑块机构可以看做是由1R 、2R 、3R 、4R 四个向量构成的封闭图形,方向如图所示。
该机构的闭环位移矢量方程1234R R R R +=+上述矢量方程在x 和y 方向的投影方程1212cos cos (1)sin sin (2)c a b x a b eθθθθ+=⎧⎨+=-⎩ 对位移方程两边求一阶导数⎩⎨⎧=+=--)4(0cos cos )3(sin sin a 22112211θωθωθωθωb a v b C 上式可用于求解连杆角速度2ω和滑块速度C v⎥⎦⎤⎢⎣⎡-=⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡--1111222cos sin 0cos 1sin θωθωωθθa a v b b C依此建立simulink 模型图2曲柄滑块机构Simulin 仿真模型其中(1) 计算连杆角速度和滑块速度的函数模块自定义函数模块vcslider.m源代码(2)计算连杆和滑块初始位置的函数模块自定义函数模块vcslider.m 源代码对上述曲柄滑块模型进行仿真。
2、 仿照上述曲柄滑块机构仿真方法,对图示曲柄摇杆机构进行建模仿真,要求用示波器显示CD 杆角位移4θ,角速度4ω和角加速度4α随曲柄转角(0~360°)变化曲线。
已知机构各构件尺寸100AB l mm =,200BC l mm =,200AD l mm =,150CD l mm =,原动件AB 以等角速度ω=10rad/s 逆时针方向转动,1θ初始位置为0。

平面六杆机构运动分析2111306008 王健1、 曲柄摇杆串RRP 型II 级杆组平面六杆机构数学模型如图1所示,当曲柄1做匀速转动时,滑块5做往复移动,该机构的行程速比系数大于1,有急回特性,且传动角较大。
设曲柄1的角速度为ω,并在铰链C 建立坐标oxy 。
由图可知,该机构由构件1、2、3、6组成的曲柄导杆机构和构件3、4、5、6组成的摆动滑块机构组成。
机构中错误!未找到引用源。
(i=1,2,3,4)分别表示曲柄l 、机架2、导杆3、连杆4的长度及滑块5的行程用5s 表示。
曲柄转动中心A 的坐标(y x H H ,)。
图1 六杆机构运动简图对构件1、2、3、6组成的曲柄导杆机构进行运动分析。
曲柄1转动角度 ϕ、连杆2转动角度 错误!未找到引用源。
及摇杆3转动角度错误!未找到引用源。
都是以X 轴正方向为起始边的度量角度,单位为rad 。
并设机构初始位置为曲柄1转角0=ϕ的位置。
该机构的位置方程为: ϕθδππi i i i x i y e L e L e L e H e H 1232/+=++ (1) 式(1)中x 、y 轴的分量等式为:{θϕδθϕδcos cos cos cos sin sin 213213L L L H L L L H x y +=+-+=+ (2) 当 错误!未找到引用源。
在 3600-作匀速变化时,就可以求出对应的连杆2的转角 错误!未找到引用源。
以及摇杆3的转角δ的值。
将式消去 错误!未找到引用源。
,得到: ()()22213213cos cos sin sin L L H L L H L x y =--+-+ϕδϕδ (3) 将(3)式分解,并分别定义:()212122231cos )sin (ϕϕL H L H L L A x y ++-+-=)sin (2131ϕL H L B y -=)cos (2131ϕL H L C x +=摇杆3的角位移()]/)tan[(2112121211C A C A B B a --+-+=δ (4) 由(2)式可得连杆 2 的角位移]/)sin sin arcsin[(213L L L H y ϕδθ-+= (5)假设曲柄作匀角速度dt d /φω=是常数,对式2求时间导数,得到连杆2的角速度2ω以及摇杆3角速度3ω,方程式如下:()()][sin cos sin cos sin cos 11233322ϕωϕωωωδδθθL L L L L L =-- (6) 对式(6)求时间导数, 得到连杆 2 的角加速度及摇杆 3 的角加速度2a ,方程式如下: ()()][cos cos cos sin sin sin sin cos sin cos 3232221232322212233322δωθϕωδωθϕωδδθθL L w L L L w L a a L L L L -+-----= (7) 再对构件3、4、5、6 组成的摆动滑块机构进行运动分析。

基于ADAMS与MATLAB的平面六杆机构运动分析作者:***来源:《现代信息科技》2022年第01期摘要:运用解析法对平面六杆机构进行运动规律分析,通过数学模型建立六杆机构的运动方程,进行位移、速度和加速度的分析。
利用MATLAB建立运动分析程序并绘制出运动曲线图。
利用ADAMS建立六杆机构虚拟样机进行运动仿真并获得运动参数曲线图,通过分析两者输出的运动参数图像,发现两者的仿真结果具有一致性。
并且,使用ADAMS仿真对机构进行运动分析可以提高分析的效率,能精确实现对平面六杆机构的运动学精确分析,这对机械系统的运动方案设计结构的优化具有重要的意义。
关键词:平面六杆机构;运动分析;MATLAB仿真;ADAMS仿真中国分类号:TP391.9 文献标识码:A文章编号:2096-4706(2022)01-0100-06Abstract: Analyze the motion rule of plane six-bar mechanism by analytic method, and establish the equation of motion of the six-bar mechanism through the mathematical model, then analyze the displacement, velocity and acceleration. MATLAB is used to establish action analysis procedure and draw the motion curve graphs. ADAMS is used to establish a six- bar mechanism virtual prototype for motion simulation and obtain the motion parameter curve graphs. By analyzing the two deferent motion parameter images, it is found that two deferent results are consistent. Moreover, using ADAMS simulation to analyze the motion of mechanism can improve the efficiency of analysis and realize the accurate kinematic analysis of the plane six-bar mechanism,which is of great significance to the optimization of the scheme design structure of the mechanical system.Keywords: plane six-bar mechanism; motion analysis; MATLAB simulation; ADAMS simulation0 引言机构运动分析是在给定机构尺度及原动件运动规律时分析机构从动件、各运动副运动规律[1] ,从而分析机构运动性能。
平面六杆机构的运动分析
1.确定机构的几何特性:首先,需要根据机构的构件和铰链的几何特
性确定机构的几何特性。
这包括确定构件的长度、铰链的位置和角度。
2.建立机构的运动方程:根据机构的几何特性,可以建立机构的运动
方程。
运动方程描述了机构各构件之间的运动关系,可以通过几何关系和
运动链法建立运动方程。
3.解决运动方程:通过求解运动方程,可以得到机构各构件的位置、
速度和加速度。
这可以通过数值方法或解析方法来完成。
4.分析机构的运动特性:根据机构的运动方程和解决的结果,可以分
析机构的运动特性。
这包括机构的平稳性、运动范围、速度和加速度的变
化等。
5.优化机构的设计:根据分析的结果,可以对机构的设计进行优化。
例如,可以调整构件的长度、角度和铰链的位置,以改善机构的运动性能。
总之,平面六杆机构的运动分析是研究和设计机械系统的重要步骤。
通过分析机构的运动特性,可以优化机构的设计,提高机械系统的性能和
效率。
因此,对平面六杆机构的运动分析有着重要的理论和实际意义。
机械原理课程设计说明书设计题目:平面六杆机构学院:机械工程学院姓名:林立班级:机英101同组人员:刘建业张浩指导老师:王淑芬题目三:平面六杆机构.一. 机构简介1.此平面六杆机构主要由一个四杆机构,和一个曲柄滑块机构构成,其中四杆机构是由1杆,2杆,3杆和机架构成的曲柄摇杆机构,1杆为主动件,转速为90rpm ,匀速转动。
其中滑块机构由3杆,4杆,滑块5和机架构成,以四杆机构的摇杆为主动件2.设计要求:各项原始数据如图所示,要求对机构的指定位置进行运动分析和动态静力分析,计算出从动件的位移,速度(角速度),加速度(角加速度)和主动件的平衡力偶M ,进行机构运动分析,建立数学模型。
之后进行动态静力分析,建立数学模型,必须注意,工作行程和返回行程阻力的大小,方向,主动件处于何位置时有力突变,需要计算两次。
二. 机构运动分析:1.首先分析1杆,2杆,3杆和机架组成的四杆机构,可列复数矢量方程 (1-1) 应用欧拉公式 将实部和虚部分 离得332211cos cos cos θθθl b l l +=+ 332211sin sin sin θθθl a l l +=+把以上两式消元整理得0cos sin 33=++CB A θθ36213621θθθθi i i i l e l l l e e e +=+θθθsin cos i i +=e其中)sin cos (22cos 22sin 21112223212231313131θθθθa b l b a l l l C bl l l B al l l A ++----=-=-=解之可得)/(])([)2/tan(2/12223C B C B A A --+±=θ (1)速度分析将式(1-1)对时间t 求导,可得333222111cos cos cos θθθw l w l w l =+ 333222111sin sin sin θθθw l w l w l =+联解以上两式可求得两个未知角速度,3杆和2杆的角速 度3w 和2w)]-sin()/[l -sin(l )]sin(/[)sin(3223111223321113θθθθθθθθw w l l w w -=--=(2)加速度分析将式(1-1)对时间t 两次求导。