测量空间参考
- 格式:doc
- 大小:55.50 KB
- 文档页数:5
基准网在测绘中的作用测绘是一项关键的技术,用于获取地球表面的准确信息。
而基准网则扮演着非常重要的角色,为测绘工作提供了可靠的参考基准。
本文将探讨基准网在测绘中的作用,并介绍基准网的种类以及其对测绘工作的影响。
一、基准网的定义与种类基准网可以被定义为一个由高精度测量仪器测定的参考网,它是一系列相互连接的地理位置点,用于确定测量结果的准确性和一致性。
基准网通常由三角测量或大地水准测量方法确定。
根据其所处的地理位置和测量目的的不同,基准网可以分为全球、国家和地区、地方三个层级。
1. 全球基准网全球基准网是由全球定位系统(GPS)仪器测量得到的,它包含了全球各地重要的地理位置点。
这些点位于地球表面的不同区域,可用于帮助测绘工作的全球协调。
2. 国家和地区基准网国家和地区基准网是专门为国家或地区而建立的,它由特定的仪器和测量技术确定。
国家基准网通常由相互连接的控制点组成,这些点被认为是测绘工作的参考点。
3. 地方基准网地方基准网是针对具体地方区域而建立的。
它通常由城市或县级测绘机构负责维护,并且对测绘活动在该区域内起着重要的参考作用。
二、基准网在测绘中扮演着重要的角色,其作用主要体现在以下几个方面:1. 提供准确的空间参考基准网为测绘工作提供了准确的空间参考,使得测量结果的准确性大大提高。
通过基准网,测绘人员可以将测定的地理位置与其他地理要素进行关联,建立地图或制定规划时,可以更加精确地定位。
2. 实现数据间的一致性基准网的建立使得测绘数据之间可以实现一致性。
在进行大范围地图制作或各种工程设计时,不同测绘数据之间的一致性至关重要。
基准网能够帮助测绘人员校正数据,并确保不同数据集之间的一致性,从而提高整体数据的可比性和可信度。
3. 促进国际互通全球基准网的建立促进了国际间的空间数据互通和交流。
通过全球基准网,不同国家和地区的测绘数据可以进行比对和校正,从而实现国际间的合作和研究。
4. 支持地理信息系统(GIS)应用基准网为地理信息系统(GIS)应用提供了坐标系统和地理定位服务。
空间测量方法一、概述空间测量方法是指用于测量和描述物体的空间形状、大小以及相对位置关系的方法和技术。
在地理信息系统、建筑工程、制图等领域中,空间测量方法起着重要的作用。
本文将从不同空间测量方法的原理、工具和应用等方面进行详细讨论。
二、传统空间测量方法2.1. 三角测量法三角测量法是传统空间测量中常用的一种方法,通过测量已知长度的基线和测量未知角度的三角形边长,然后利用三角形的几何关系求解未知边长和角度。
三角测量法的精度较高,适用于小范围的测量,如制图和地理测量等领域。
2.2. 平面测量法平面测量法是通过测量物体在水平平面上的长度、宽度等参数来描述物体的空间形状。
常用的平面测量工具包括测量尺、经纬仪等。
平面测量法适用于测量平面上的二维物体,如图纸、地图等。
2.3. 光学测量法光学测量法是利用光学原理进行空间测量的一种方法。
通过测量物体对光的反射、折射或干涉等现象,来计算物体的形状和位置。
光学测量法常用的设备包括全站仪、激光测距仪等。
光学测量法精度高,适用于需要高精度测量的领域,如建筑工程和制图等。
三、现代空间测量方法3.1. 全球定位系统(GPS)全球定位系统是一种基于卫星导航的现代空间测量方法。
通过接收卫星发射的信号,测量接收器与卫星之间的距离,进而确定接收器的位置。
GPS可以实现全球范围内的高精度定位和导航,广泛应用于地理信息系统和航空航海等领域。
3.2. 遥感技术遥感技术是利用航空或卫星传感器获取地面、大气和水体等信息的一种空间测量方法。
遥感技术可以获取大范围的空间数据,包括地表覆盖类型、地形高程、气候变化等,可应用于环境监测、资源调查等领域。
3.3. 激光扫描技术激光扫描技术是一种高精度的三维空间测量方法。
通过发射激光束并测量其反射时间,可以获取物体的三维坐标。
激光扫描技术在建筑工程、地质勘探等领域有广泛的应用,可以实现高精度的形状测量和模型重建。
3.4. 三维打印技术三维打印技术是一种将数字模型转化为物理物体的空间测量方法。
空间格局测定实验报告1. 实验目的本实验旨在通过测定和分析空间格局,探究不同空间环境对人的活动行为的影响,为城市规划和设计提供依据。
2. 实验方法2.1 实验器材- 测距仪:用于测量活动范围和距离,精确度为0.01米。
- 计时器:用于测量不同空间环境下活动的时间,精确到秒。
- 相机:用于记录被试者的活动路径和行为。
2.2 实验设计在城市中选择了两个具有不同空间格局的区域进行测定。
区域A为开放式公园,具有较大的空间范围和广阔的视野;区域B为狭窄的背街巷道,空间狭小且视野受限。
实验过程中,将100名被试者分为两组,每组50人。
第一组在区域A进行活动,第二组在区域B进行活动。
每个被试者进行两次不同环境下的活动,活动时间为30分钟。
实验过程中,记录被试者的活动路径和行为。
3. 实验结果与分析3.1 空间活动范围通过测距仪获得被试者的空间活动范围数据,并进行统计分析。
结果显示,在区域A中,被试者的平均活动范围为50平方米,最大活动范围为80平方米。
而在区域B中,被试者的平均活动范围为20平方米,最大活动范围为40平方米。
分析结果表明,区域A的开放空间和广阔的视野促使被试者活动范围更大,而区域B的狭小空间和视野受限限制了被试者的活动范围。
3.2 活动时间通过计时器获得被试者在不同空间环境下的活动时间,并进行统计分析。
结果显示,在区域A中,被试者的平均活动时间为25分钟,最长活动时间为28分钟。
而在区域B中,被试者的平均活动时间为18分钟,最长活动时间为20分钟。
分析结果表明,区域A的开放空间和宜人环境可以吸引被试者更长时间地活动,而区域B的狭小空间和较差环境则限制了被试者的活动时间。
3.3 行为观察通过相机记录被试者的活动路径和行为,进行行为观察和分析。
结果显示,在区域A中,被试者进行了多种活动,如散步、跑步、休息等。
而在区域B中,被试者的行为相对单一,主要活动为快速通行。
分析结果表明,区域A的开放和宜人环境鼓励了多样化的行为活动,而区域B 的狭小空间限制了被试者的行为选择。
建筑物内部空间测量的方法与注意事项一、引言建筑物的内部空间测量在建筑设计、改造与维护过程中起着至关重要的作用。
准确测量建筑物内部空间的尺寸和结构,可以为设计师和工程师提供必要的数据支持,确保设计方案的准确性和施工质量的可控性。
本文将介绍一些常用的建筑物内部空间测量方法和注意事项。
二、测量方法1.仪器测量仪器测量是建筑物内部空间测量中最常见的一种方法。
利用激光测距仪、全站仪等先进的测量设备,可以快速且精确地测量出建筑物内部空间的尺寸和角度。
这种方法适用于大型建筑物的测量,可以提高测量效率和准确度。
2.手工测量手工测量是一种传统但仍然常用的测量方法。
在建筑物内部,使用卷尺、水平仪等简单工具进行测量,可以获取建筑物的长度、宽度、高度等基本尺寸数据。
这种方法适用于小型建筑物或有限的空间测量,要求操作人员具备一定的测量技能和经验。
3.三维扫描技术随着科技的不断发展,三维扫描技术在建筑物内部空间测量中得到了广泛应用。
通过将激光扫描仪置于建筑物内进行扫描,可以获取大量的点云数据,然后通过后期处理软件进行三维模型的重建和分析。
这种方法可以实现复杂建筑物内部空间的全面测量,适用于需要精确模型或空间研究的场景。
三、注意事项1.安全第一在进行建筑物内部空间测量时,安全是第一考虑因素。
操作人员要佩戴个人防护装备,确保自身安全。
在进行高空测量时,要利用安全绳索等设备,预防坠落和其他意外事故的发生。
2.准确数据测量的数据必须准确可靠,以确保后续的设计和施工工作能够顺利进行。
在选择测量方法时,要根据具体场景综合考虑各个因素,确保数据的准确性和可比性。
3.多角度测量建筑物内部空间存在着各种复杂形状和尺寸,为了准确捕捉建筑物的所有细节,需要进行多角度的测量。
通过从不同的位置和角度进行测量,可以获取更全面的数据,确保设计和施工的精确性。
4.重点部位测量在进行建筑物内部空间测量时,有些部位是设计和施工中的重点关注对象,需要给予特殊的测量注意。
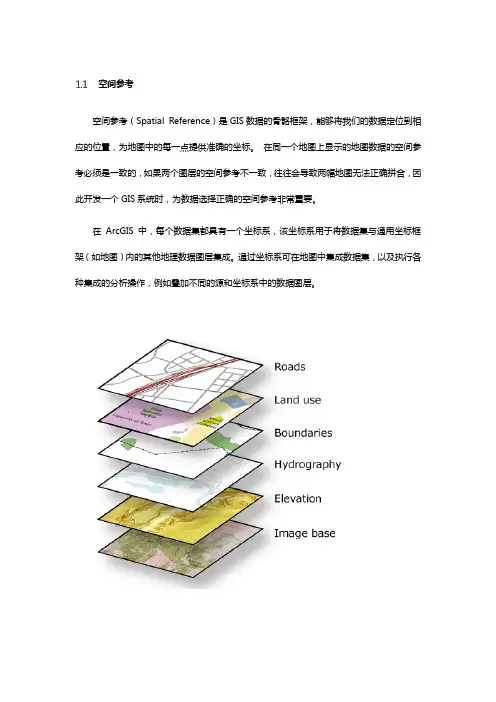
1.1 空间参考空间参考(Spatial Reference)是GIS数据的骨骼框架,能够将我们的数据定位到相应的位置,为地图中的每一点提供准确的坐标。
在同一个地图上显示的地图数据的空间参考必须是一致的,如果两个图层的空间参考不一致,往往会导致两幅地图无法正确拼合,因此开发一个GIS系统时,为数据选择正确的空间参考非常重要。
在ArcGIS 中,每个数据集都具有一个坐标系,该坐标系用于将数据集与通用坐标框架(如地图)内的其他地理数据图层集成。
通过坐标系可在地图中集成数据集,以及执行各种集成的分析操作,例如叠加不同的源和坐标系中的数据图层。
1.1.1 相关知识1.1.1.1大地水准面大地水准面是由静止海水面并向大陆延伸所形成的不规则的封闭曲面。
它是重力等位面,即物体沿该面运动时,重力不做功(如水在这个面上是不会流动的)。
因为地球的质量并非在各个点均匀分布,因此重力的方向也会相应发生变化,所以大地水准面的形状是不规则的,如下图:1.1.1.2地球椭球体由定义可以知大地水准面的形状也是不规则的,仍不能用简单的数学公式表示,为了测量成果的计算和制图的需要,人们选用一个同大地水准面相近的可以用数学方法来表达的椭球体来代替,简称地球椭球体,它是一个规则的曲面,是测量和制图的基础,因地球椭球体是人们选定的跟大地水准面很接近的规则的曲面,所以地球椭球体就可以有多个,地球椭球体是用长半轴、短半轴和扁率来表示的。
下表列出了一些最常见的参考椭球:1.1.1.3基准面基准面是在特定区域内与地球表面极为吻合的椭球体。
椭球体表面上的点与地球表面上的特定位置相匹配,也就是对椭球体进行定位,该点也被称作基准面的原点。
原点的坐标是固定的,所有其他点由其计算获得。
基准面的坐标系原点往往距地心有一定偏移(有的也在地心,如WGS1984),如西安80的基准面和北京54的基准面.因为椭球体通过定位以便能更好的拟合不同的地区,所以同一个椭球体可以拟合好几个基准面.因为原点不同,所以不同的基准面上,同一个点的坐标是不相同的,这点我们应该清楚.下面以华盛顿州贝灵厄姆市为例来说明。
空间测量举例分析报告分析报告内容开始:1. 引言在这份空间测量举例分析报告中,我们将着重分析几个不同的空间测量案例。
这些案例包括测量建筑物、测量土地和测量地下设施。
我们将对每个案例进行详细的分析,包括测量的目的、测量方法、测量结果和可能的应用。
2. 案例一:测量建筑物目的:这个案例中的目的是测量建筑物的尺寸和形状,以便进行室内设计和空间规划。
方法:为了测量建筑物,使用了全站仪进行高程和水平角度测量,同时使用激光测距仪进行距离测量。
结果:通过测量,获得了建筑物的平面图和立面图,包括房间的尺寸、门窗的位置和墙壁的厚度。
应用:这些测量结果可以用于室内设计师和建筑师进行建筑物的改造和空间规划。
3. 案例二:测量土地目的:这个案例中的目的是测量土地的面积和边界,以便进行土地分割和土地评估。
方法:为了测量土地,使用了全站仪进行地面点的高程和水平角度测量,同时使用GPS进行边界线的测量。
结果:通过测量,获得了土地的平面图,包括土地的面积和边界线的位置。
应用:这些测量结果可以用于土地分割和土地评估,例如进行房地产开发或土地交易。
4. 案例三:测量地下设施目的:这个案例中的目的是测量地下设施的位置和深度,以便进行管线维护和施工规划。
方法:为了测量地下设施,使用了地下雷达进行地下管线位置的测量,同时使用潜水泵进行地下水位的测量。
结果:通过测量,获得了地下设施的平面图和剖面图,包括地下管线的位置和深度以及地下水位的高度。
应用:这些测量结果可以用于地下管线的维护和施工规划,确保施工过程中不会损坏地下设施。
5. 总结通过以上几个案例的分析,我们可以看到空间测量在不同领域中的重要性和应用。
它不仅可以用于建筑设计和土地评估,还可以用于地下设施维护和施工规划。
因此,合理和准确的空间测量对于各种工程项目的成功实施至关重要。
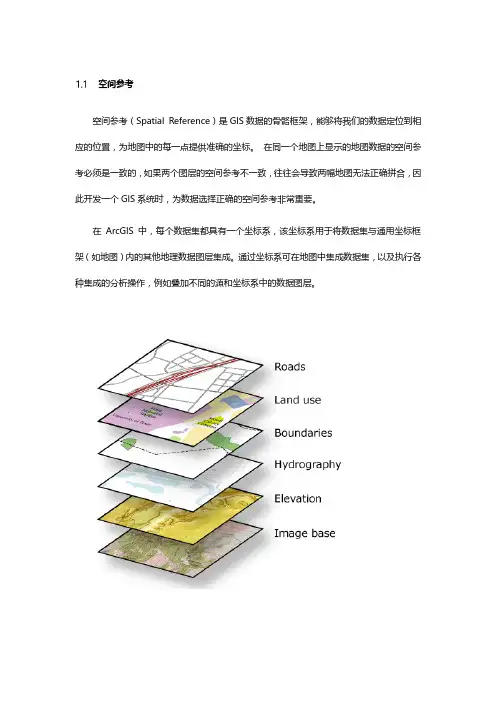
空间参考空间参考(Spatial Reference)是GIS数据的骨骼框架,能够将我们的数据定位到相应的位置,为地图中的每一点提供准确的坐标。
在同一个地图上显示的地图数据的空间参考必须是一致的,如果两个图层的空间参考不一致,往往会导致两幅地图无法正确拼合,因此开发一个GIS系统时,为数据选择正确的空间参考非常重要。
在ArcGIS 中,每个数据集都具有一个坐标系,该坐标系用于将数据集与通用坐标框架(如地图)内的其他地理数据图层集成。
通过坐标系可在地图中集成数据集,以及执行各种集成的分析操作,例如叠加不同的源和坐标系中的数据图层。
1.1.1 相关知识1.1.1.1大地水准面大地水准面是由静止海水面并向大陆延伸所形成的不规则的封闭曲面。
它是重力等位面,即物体沿该面运动时,重力不做功(如水在这个面上是不会流动的)。
因为地球的质量并非在各个点均匀分布,因此重力的方向也会相应发生变化,所以大地水准面的形状是不规则的,如下图:1.1.1.2地球椭球体由定义可以知大地水准面的形状也是不规则的,仍不能用简单的数学公式表示,为了测量成果的计算和制图的需要,人们选用一个同大地水准面相近的可以用数学方法来表达的椭球体来代替,简称地球椭球体,它是一个规则的曲面,是测量和制图的基础,因地球椭球体是人们选定的跟大地水准面很接近的规则的曲面,所以地球椭球体就可以有多个,地球椭球体是用长半轴、短半轴和扁率来表示的。
下表列出了一些最常见的参考椭球:1.1.1.3基准面基准面是在特定区域内与地球表面极为吻合的椭球体。
椭球体表面上的点与地球表面上的特定位置相匹配,也就是对椭球体进行定位,该点也被称作基准面的原点。
原点的坐标是固定的,所有其他点由其计算获得。
基准面的坐标系原点往往距地心有一定偏移(有的也在地心,如WGS1984),如西安80的基准面和北京54的基准面.因为椭球体通过定位以便能更好的拟合不同的地区,所以同一个椭球体可以拟合好几个基准面.因为原点不同,所以不同的基准面上,同一个点的坐标是不相同的,这点我们应该清楚.下面以华盛顿州贝灵厄姆市为例来说明。
如何进行空间测量空间测量是一项重要的技术,用于实际应用中的建筑设计、土地规划以及地理信息系统等领域。
它不仅可以帮助我们了解物体的尺寸和形状,还可以提供精确的数据支持,为各行各业的决策和规划提供参考。
本文将探讨空间测量的方法和技巧,以及利用测量数据进行分析和应用的相关内容。
一、传统测量方法1.1 三角测量法三角测量法是一种基础性的测量方法,利用三角形的性质来确定目标物体的尺寸和位置。
它适用于小范围的测量,可以在室内和室外环境中使用。
通过在目标物体和测量仪器之间建立多个三角形,测量仪器可以计算出目标物体与测量仪器的距离和角度,从而确定目标物体的位置。
1.2 静态测量法静态测量法是一种利用测量仪器直接测量目标物体尺寸和位置的方法。
它适用于大范围的测量,可以在室内和室外环境中使用。
该方法通过在目标物体周围设置多个测量点,利用测量仪器对每个测量点进行测量,然后计算出目标物体的尺寸和位置。
二、现代测量技术2.1 全站仪全站仪是一种集测角、测距和测高为一体的测量仪器,它可以实现高精度的空间测量。
全站仪采用电子技术和激光技术,可以实时记录和处理测量数据,提高测量的效率和准确性。
它广泛应用于建筑工程、土地勘测和地形测绘等领域。
2.2 激光扫描仪激光扫描仪是一种高精度的测量仪器,它利用激光束扫描目标物体表面,通过测量激光束的反射时间和强度来获取目标物体的尺寸和形状数据。
激光扫描仪可以快速获取大范围的测量数据,并且可以以三维点云的形式存储和处理,为后续分析和应用提供了丰富的数据支持。
三、测量数据的分析和应用3.1 数据处理与建模测量数据通过软件进行处理和建模,可以得到目标物体的三维模型和属性信息。
利用CAD软件可以对测量数据进行拼接、对齐和修正,生成精确的三维模型。
在建筑设计和土地规划中,可以使用这些模型进行空间分析和模拟,评估设计方案的可行性和效果。
3.2 地理信息系统地理信息系统(GIS)是一种集成空间数据、地图和分析功能于一体的信息系统。
《大地测量学》教学大纲(最终版)第一篇: 《大地测量学》教学大纲(最终版)《大地测量学》教学大纲一、课程概述1. 课程的性质与地位“大地测量学基础”是测绘学科本科各专业的一门专业基础必修课, 对学生建立测绘基准(包括: 大地基准、高程基准、重力基准)和测绘系统(包括: 大地坐标系统、平面坐标系统、高程系统、地心坐标系统和重力测量系统)等测绘学科的基本概念, 了解大地测量数据采集技术和大地控制网的建立技术, 掌握大地测量学的基本理论、技术和方法, 培养学生良好的业务作风, 为进一步学习其他专业课打下坚实基础具有不可替代的重要作用和意义。
2. 课程基本理念本课程的教学应坚持以人为本、以学为主、注重创新意识和综合素质培养的指导思想, 坚持将知识学习、能力训练和综合素质培养融为一体, 将大地测量学理论学习与测绘实践紧密结合, 强调学生在学习中发现问题、分析问题、解决问题的能力, 注重对学生科学探索精神、创新意识和团队精神的培养。
3. 课程设计思路本课程以测绘基准和测绘系统为主线, 以各专业后续专业课程的需要和工程实际应用为主导, 按照循序渐进的思路, 从大地测量数据采集技术入手, 逐步引入各类测绘成果处理过程中所必须依据的各种基准和系统, 并安排相应的计算实习, 巩固和加深学生对所学理论的理解。
本课程是近年我院教学改革和课程建设的新产物, 要力求避免原有多门课程知识的简单拼凑, 按照21世纪人才培养对大地测量学基础知识的要求, 针对大学本科生的知识基础, 明确课程主旨, 合理选取课程内容, 贯彻“少而精”的方针。
因此, 本课程并不完全遵循已有的专业课程体系, 也不受限于以往的课程设置范式。
大学专业基础课程与适当介绍学术热点、学术前沿之间似乎存在一定的矛盾, 但恰好可以成为激励学生热情并融科学性、趣味性于一炉的画龙点睛之处。
因此, 本课程在重视基础内容的经典性和完整性的同时, 也酌情安排一些关于学科新进展的窗口, 以利于开拓学生的视野和思路, 并作为测量工程后续专业课程的接口。
如何进行建筑物内部空间的测量建筑物内部空间的测量是建筑设计和规划中必不可少的一项任务。
准确测量建筑物内部空间的尺寸和布局是实现设计目标和满足用户需求的关键。
本文将探讨如何进行建筑物内部空间的测量,包括测量工具、方法和技巧。
一、测量工具在进行建筑物内部空间的测量之前,需要准备一些基本的测量工具。
常用的测量工具包括:测量尺、刻度尺、水平仪、激光测距仪、全站仪等。
这些工具可以帮助测量人员准确测量房间的尺寸、高度、角度以及地面的水平度等参数。
二、测量方法1. 直角法测量:直角法是测量房间尺寸最常用的方法之一。
测量人员使用测量尺或刻度尺在地板上绘制垂直和水平的基准线,然后使用激光测距仪或测量尺沿直线测量房间的长度和宽度。
2. 三角法测量:三角法是在无法直接测量的情况下测量房间尺寸的常用方法之一。
测量人员利用三角比例关系,通过测量已知长度的两条边和两边间的夹角,计算出未知边的长度。
这个方法适用于测量房间内不规则或有障碍物的区域。
3. 全站仪测量:全站仪是一种高精度的测量仪器,可以同时测量水平和垂直方向的坐标。
使用全站仪进行建筑物内部空间的测量可以更准确地获取房间的坐标和高度等信息。
三、测量技巧1. 在测量之前,要先准备好地面,清除杂物,并保持地面的干燥和平整。
这样可以避免杂物对测量结果的影响,并提高测量的准确性。
2. 测量时要保持工具的稳定和水平。
使用水平仪校验测量工具的水平度,并在需要时进行调整,以确保测量结果的准确性。
3. 对于房间内的弯曲或不规则墙壁,可以使用钢尺或软尺进行多点测量,然后取平均值,以减小误差。
4. 在进行复杂布局的空间测量时,可以将房间分割成更小的区域进行测量,并将测量结果综合起来,以实现更高精度的测量。
四、数据处理完成建筑物内部空间的测量后,需要对测量数据进行处理和记录。
可以使用计算机辅助设计(CAD)软件将测量数据转化成图形,以便后续的设计和规划工作。
此外,还可以将测量数据与建筑物的其他参数进行整合,如建筑物的结构、电气和给排水系统等,以提供全面的设计和规划服务。
人机工程学尺寸测量项目人体尺寸:
家具:
1、衣柜深度:
2、衣柜门宽度:
3、电视柜深度及高度
4、单人床宽度及长度:
5、双人床宽度及长度:
6、室内门宽度及高度:
7、沙发:单人式:长度,深度;坐垫高;背高
双人式:长度;深度;坐垫高;背高
三人式:长度;深度;坐垫高;背高
四人式:长度;深度;坐垫高;背高8、书桌:固定式:深度;高度
活动式:深度;高度
书桌下部分离地高度:
9、餐桌高度:
10、餐椅高度:
11、书架深度:
12、茶几高度:
13、橱柜高度:
宽度:
吊柜宽度:
室内:
1、墙面尺寸
(1)踢脚板高:
(2)墙裙高:
2、餐饮空间
(1) 主通道宽:
(2) 内部工作道宽:
(3) 酒吧台高:
(4) 酒吧凳高:
3.商场营业厅
(1)单边双人走道宽:
(2)双边双人走道宽:
(3)双边三人走道宽:
(4)双边四人走道宽:
(5)营业员柜台走道宽:
(6)营业员货柜台高:4.饭店客房
(1)床高:
床靠高:
(2)床头柜高:
床头柜宽:
5.卫生间
(1)卫生间面积:
(2)卫生间门宽度及高度:
(3)浴缸长度;宽;高
(4)坐便器:
(5)淋浴器高:2100mm。
(6)化妆台:
6.交通空间
(1)楼梯扶手高:
(2)门的常用尺寸:
(3)窗台高:。
用纸测量空间的方法用纸作为测量空间的工具,是我们在日常生活或者是工作中都会用到的方法。
这种方法使用简单,而且可以快速地测量一个空间的长度、宽度、高度和面积等信息。
在建筑设计和室内设计等领域中,也可以利用这种方法对空间进行初步的规划和设计。
一、用纸测量空间长度在需要测量空间长度的时候,我们可以利用一张纸条。
首先,将纸条平铺在需要测量的地面上,确定起点和终点。
然后,用手指压住纸条的起点,将纸条向终点方向拉直,用手指再次压住终点。
这时,可以用尺子或打印出的标尺来测量纸条的长度,即为测量出的空间长度。
二、用纸测量空间宽度在需要测量空间宽度的时候,我们可以利用两张纸条。
首先,将一张纸条平铺在需要测量的地面上,确定起点和终点。
然后,将另一张纸条贴在第一张纸条上,平行地拉到需要测量的位置。
用手指压住贴在上方的纸条,然后将它从下方拿出来,用尺子或打印出的标尺来测量宽度。
三、用纸测量空间高度在需要测量空间高度的时候,我们可以利用折叠好的纸片。
首先,将一张纸片从中间折叠成两半,然后再将其中一个角折起来。
将纸片的直角对准需要测量的垂直点,使折起来的部分贴着物体,然后读出纸片未折起的那一边的长度。
这个长度就是所测量的空间高度。
四、用纸测量空间面积在需要测量空间面积的时候,我们可以利用多个纸条。
首先,将纸条平铺在需要测量的地面上,确定起点和终点,并将它们拼接成一个矩形。
然后,使用尺子来测量每条纸条的长度和宽度。
将这些数据相乘,就可以得出所需的面积。
除了以上基本的用纸测量方法,我们还可以通过一些特殊的方式来进行补充。
例如,可以用便条或者薄片纸来作为高度的测量物,用来测量相对较高的物体,或者楼梯的高度。
在测量斜面时,可以用斜率板等测量工具来进行计算。
总的来说,用纸作为测量工具,虽然每种方法都是基于简单的原理,但是可以准确地得出所需的空间测量数据。
需要注意的是,这种方法的准确度要求较高,如果没有经验的话容易出现误差。
因此,在进行实际的测量时,需要注意认真仔细,保证数据的准确性。
空间面积测量技术指南1、引言在如今快节奏的城市生活中,人们对空间面积的准确测量需求越来越高。
无论是为了购房、装修、物品摆放还是设计规划,准确测量空间面积都是一个基本需求。
本文将介绍几种常用的空间面积测量技术,并分享一些实用的技巧和注意事项。
2、直尺测量法直尺测量法是最简单直接的一种方法。
它适用于规则形状的房间,比如矩形或正方形。
首先,用直尺测量边长,并将其记录下来。
然后,将边长相乘,即可得到空间的面积。
需要注意的是,测量时要确保直尺与墙面垂直,并尽量避免误差。
3、分割法对于不规则的空间形状,可以使用分割法来测量面积。
首先,将空间分割为方便计算的几个基本形状,比如矩形、三角形或梯形。
然后,分别计算每个形状的面积,并将它们相加。
这种方法可用于测量较为复杂的空间,但需要注意的是,切割后的形状要保持准确。
4、激光测距仪激光测距仪是一种现代化的测量工具,它利用激光束的高频振荡来测量距离,并结合计算得出面积。
使用激光测距仪时,只需要将仪器对准待测点,按下测量键,即可得到准确的距离数据。
然后,重复测量其他边的长度,并进行计算即可得出面积。
激光测距仪的优势在于快速、准确,适用于各种形状的空间。
5、移动式测绘仪移动式测绘仪是一种专业的测量仪器,它利用内置的传感器和地图绘制功能,能够实时测量空间的面积和轮廓。
使用移动式测绘仪时,只需要在空间内移动,仪器会自动记录相关数据并绘制出精确的地图。
这种方法适用于大型空间或复杂形状的测量,但需要注意的是,使用前要熟悉仪器的操作和校准。
6、实用技巧除了选择适当的测量技术,还有一些实用的技巧可以帮助提高测量的准确性。
首先,要保持测量工具的良好状态,及时清洁和校准。
其次,要选择合适的测量单位,并进行单位转换时要小心。
另外,测量时要仔细观察,避免遮挡或忽略一些细节。
最后,重复测量几次并取平均值,可以进一步减少误差。
7、注意事项在进行空间面积测量时,也有一些注意事项需要遵守。
首先,要确保安全,选择适当的测量时间和场地,避免在拥挤或不安全的环境中进行。
如何进行建筑物空间位置精确测量的方法解析建筑物的空间位置精确测量是建设和设计过程中至关重要的一步。
准确测量建筑物的位置可以确保建筑物的稳定性、安全性,同时也能为后续的施工和设计工作提供准确的参考数据。
在建筑物空间位置精确测量中,有多种方法可以使用。
本文将从基础测量方法、现代技术应用以及测量后的数据处理与应用等方面进行解析。
一、基础测量方法1. 测量仪器的选择:测量仪器的选择是进行精确测量的基础。
常用的测量仪器包括全站仪、经纬仪、优盘测距仪等。
在选择测量仪器时,需要考虑测量范围、测量精度和使用方便性等因素。
2. 基准测量:基准测量是建筑物空间位置精确测量的第一步,它确定了建筑物的参考框架。
常用的基准测量包括水准测量和三角测量等。
水准测量可以通过水准仪进行,而三角测量通过测量角度和距离来计算位置。
3. 差值法测量:差值法测量是建筑物空间位置精确测量中常用的方法。
它通过将测量结果与已知的基准点进行比对,计算出差值,从而得出建筑物的实际位置。
二、现代技术应用1. 卫星定位系统:卫星定位系统(GPS)是现代建筑物空间位置精确测量中的重要工具。
它通过接收卫星发射的信号,计算出建筑物所在的经纬度坐标,从而实现精确测量。
2. 激光测距仪:激光测距仪是一种利用激光束进行测量的仪器。
它可以通过测量激光束的反射时间,计算出建筑物与目标之间的距离,从而实现精确测量。
3. 三维扫描仪:三维扫描仪可以通过扫描建筑物表面,获取大量的点云数据。
这些点云数据可以用于构建建筑物的三维模型,从而实现建筑物空间位置的精确测量。
三、数据处理与应用1. 数据处理:建筑物空间位置的精确测量得到的数据需要进行处理,以提高其精度和可靠性。
数据处理包括数据差值计算、数据滤波以及误差校正等步骤,可以使用专业的测量软件进行处理。
2. 应用:建筑物空间位置的精确测量数据可以应用于多个方面。
比如,在建设过程中,可以根据测量数据进行精确的施工规划和设计;在建筑物维护中,可以根据测量数据进行结构监测和维护工作等。
照度计测量位置标准
稿子一:
嘿,亲爱的小伙伴们!今天咱们来聊聊照度计测量位置的标准哟!
你知道吗,这测量位置可太重要啦!就好像我们找宝藏,得找对地方才有惊喜。
比如说,在室内测量的时候,可不能随便找个角落就开始,得选那些经常有人活动的地方,像办公桌呀、沙发旁边呀。
为啥呢?因为这些地方人们待的时间长,照度够不够直接影响我们的感受和工作效率。
还有哦,如果是测量教室的照度,那讲台和学生的座位区域可不能落下。
老师在讲台上辛苦讲课,得有足够的光线;学生们认真学习,眼睛也得被好好照顾呀。
要是测量工厂车间,就得关注操作台面和机器附近,这样才能保证工人干活儿的时候能看得清楚,又安全又高效。
哎呀呀,测量位置选对了,才能得到准确又有用的数据,是不是很有趣呢?
稿子二:
亲人们,今天咱们好好唠唠照度计测量位置标准这回事儿!
你们想啊,要是测量位置不对,那得出的数据不就不靠谱了嘛!比如说,在测量卧室的时候,可不能只测床头那一小块地方,得把整个房间都照顾到。
特别是窗户旁边和床的中间位置,光线变化可能会很大呢。
要是只测一个点,那可就闹笑话啦。
还有在测量商场的时候,收银台、货架区还有顾客休息的地方,都得测一测。
不然灯光布置不合理,顾客逛着不舒服,商家生意也受影响呀。
另外,如果是户外的测量,比如公园或者广场,那得选人们经常走动、停留的地方,像长椅附近、游乐设施旁边。
反正记住啦,测量位置要全面、有代表性,这样才能真正了解光照情况,让我们的生活环境更加明亮舒适哟!怎么样,是不是觉得挺有意思的?。
空间参考描述了一个地物在地球上的真实位置。
为了正确的对位置进行描述,需要引入一个可供测量和计算的框架,使得大地测量的结果能够在这个框架上进行描述。
而地球是一个不规则形状的椭球体,那么使用什么样的方法来模拟地球的形状,又该如何将球面上的坐标投影在平面的地图上?这就需要先了解大地水准面、参考椭球体、基准面的概念,和它们之间的关系。
另外,本文还对我国常用的北京54和西安80两种坐标系统进行了详细的剖析。
1.大地水准面(Geoid)和参考椭球体(Spheroid)大地水准面提供一个可供测量的表面,它基本与静止的海平面吻合,且处处与重力方向垂直。
因为地球表面各个点的重力方向不同,因此大地水准面是个不规则的椭球体。
为了能够使用数学法则来描述地球的形状,处理测量的成果,这就需要引入一个规则的球体,即参考椭球体的概念。
参考椭球体是由二维平面上的椭圆绕着短轴旋转而形成的。
参考椭球体的长半轴指的是地心距赤道的距离,参考椭球体的短半轴指的是地心距地球极点的距离。
不同的参考椭球体的长、短半轴都是不同的。
如下表所示:Spheroid Semimajor axis (m) Semiminor axis (m)Clarke 1866 6378206.4 6356583.8GRS80 1980 6378137 6356752.31414WGS84 1984 6378137 6356752.31424518不同的地理区域需要选择不同的参考椭球体来进行描述,因为不同的参考椭球体是用来模拟地球上不同地方的大地水准面的。
例如在北美地区,NAD83这种大地坐标系统使用的参考椭球体就是GRS 1980椭球。
对于同一个位置,选择不同的参考椭球体和基准面会改变其坐标值的大小。
下面的例子是华盛顿州的贝林翰采用不同的大地坐标系统的结果,可以看到NAD1927和另外两个的坐标值有很大的差别。
Datum Longitude LatitudeNAD 1927 -122.46690368652 48.7440490722656NAD 1983 -122.46818353793 48.7438798543649WGS 1984 -122.46818353793 48.74387985342992.基准面(Datum)参考椭球体定义了地球的形状,而基准面则描述了这个椭球中心距地心的关系。
基准面是建立在选择的参考椭球体上的,且考虑到了当地复杂的地表情况。
因为参考椭球体还是不能够很好的描述地球上每个地方的具体情况,可以理解为基准面就是参考椭球向某个地方的大地水准面逼近的结果,它与参考椭球是多对一的关系。
(1)地心基准面(Geocentric datums)在过去的15年,使用卫星采集数据给测量学家们提供了一个很好的模拟地球的椭球体,即地心坐标系统。
地心坐标系是使用地球的质心作为中心,目前使用最广泛的就是WGS 1984这种地心坐标系。
(2)本地基准面(Local datums)本地基准面是将参考椭球体移动到更贴近当地地表形状的位置,参考椭球体上的某一点必然对应着地表上的某一位置,这个点就称作大地起算原点。
大地起算原点的坐标值是固定的,其他点的坐标值都可以由该点计算得到。
本地坐标系统的起始位置一般就不在地心的位置了,而是距地心一定的偏移量。
3.空间参考(Spatial Reference)一个空间参考包括了描述要素X,Y,Z位置的坐标系统(Coordinate System),以及描述要素X,Y,Z,M值的分辨率(resolution)和容限(tolerance)。
(1)坐标系统坐标系统分为大地坐标系统(Geographic coordinate system)和投影坐标系统(Project coordinate system)两种,分别用来表示三维的球面坐标和二维的平面坐标。
一个GCS的定义包括基准面、角度的单位(一般是度)和本初子午线。
一个PCS的定义包括一个GCS,以及测量的线性单位(米或者英尺)、地图投影方法和投影的一些参数。
一个PCS或者GCS中也可能会包含一个垂直坐标系统(VCS)描述Z值,它通常是对高程的描述。
VCS的定义包含了高程的基准面、测量的线性单位、Z轴的方向和偏移量。
(2)分辨率(Resolution)分辨率反映了数据库中可以存储的坐标值的最小地图单位长度,例如如果分辨率是0.01,那么1.22和1.23将会被存储为不同的点,而1.222和1.223将会被认为都是1.22。
如下图所示:分辨率的单位和地图单位一致,如果当前投影坐标系统的单位是米,那么分辨率的单位也是米,默认的分辨率大小为0.0001;如果是英尺为单位,则默认值是0.0003281英尺(0.003937 英寸);如果是经纬度的,则默认值是0.000000001度。
如果分辨率越小,那么坐标可以存储的位数就越多,也必然会消耗掉I/O资源;如果分辨率变大,那么要素所存储的精度就会降低,要素的边界将会被平滑。
一般情况下,我们都选择使用系统默认的分辨率值。
(3)容限(Tolerance)容限反映了数据的坐标精度,也就是坐标值之间的最小距离,小于这个容限的将会被认为是同一个点。
容限经常会被使用在关系和拓扑运算中,来确定两个点是否会被合并为同一个点。
对于以米为单位的投影坐标系统,默认的容限值是0.001,也就是10倍的分辨率值。
用户可以自定义容限值,但是不要小于分辨率的2倍大小。
4.北京54和西安80北京54和西安80是我国主要使用的两种坐标系统,它们其实指的是两个Datum的概念。
因此,北京54和西安80即可以指大地坐标系统(GCS),又可以指投影坐标系统(PCS)。
我们先来看看ArcGIS中对于北京54在GCS中的定义:Angular Unit: Degree (0.017453292519943299)Prime Meridian: Greenwich (0.000000000000000000)Datum: D_Beijing_1954Spheroid: Krasovsky_1940Semimajor Axis: 6378245.000000000000000000Semiminor Axis: 6356863.018773047300000000Inverse Flattening: 298.300000000000010000可以看到,Datum是D_Beijing_1954。
北京54使用的是克拉索夫斯基椭球,大地原点在西伯利亚。
而西安80使用的是IAG 75椭球,大地原点在陕西泾阳。
再来看北京54在PCS中的定义:Projection: Gauss_KrugerFalse_Easting: 500000.000000False_Northing: 0.000000Central_Meridian: 117.000000Scale_Factor: 1.000000Latitude_Of_Origin: 0.000000Linear Unit: Meter (1.000000)Geographic Coordinate System: GCS_Beijing_1954Angular Unit: Degree (0.017453292519943299)Prime Meridian: Greenwich (0.000000000000000000)Datum: D_Beijing_1954Spheroid: Krasovsky_1940Semimajor Axis: 6378245.000000000000000000Semiminor Axis: 6356863.018773047300000000Inverse Flattening: 298.300000000000010000可以看到,一个PCS必然包含一个GCS的定义,也就是说PCS=GCS+地图投影。
我国的基本比例尺地形图(1:5千,1:1万,1:2.5万,1:5万,1:10万,1:25万,1:50万,1:100万)中,大于等于50万的均采用高斯-克吕格投影,又叫横轴墨卡托投影(Transverse Mercator);小于50万的地形图采用正轴等角割圆锥投影,又叫兰勃特投影(Lambert Conformal Conic);海上小于50万的地形图多用正轴等角圆柱投影,又叫墨卡托投影(Mercator)。
在ArcGIS软件中,北京54和西安80的PCS坐标都是使用高斯-克吕格投影。
5.高斯克吕格(1)高斯克吕格投影高斯-克吕格投影是等角横轴切圆柱投影,该投影按照投影带中央子午线投影为直线且长度不变和赤道投影为直线的条件,确定函数的形式,从而得到高斯-克吕格投影公式。
投影后,除中央子午线和赤道为直线外,其他子午线均为对称于中央子午线的曲线。
设想用一个圆柱横切于椭球面上投影带的中央子午线,按上述投影条件,将中央子午线两侧一定经差范围内的椭球面投影于圆柱面。
将圆柱面沿过南北极的母线剪开展平,即为高斯投影平面。
取中央子午线与赤道交点的投影为原点,中央子午线的投影为纵坐标x轴,赤道的投影为横坐标y轴,构成高斯克吕格平面直角坐标系。
(2)高斯克吕格分带高斯-克吕格投影在长度和面积上变形很小,中央经线无变形,自中央经线向投影带边缘,变形逐渐增加,变形最大之处在投影带内赤道的两端。
为了减少投影后的变形,高斯克吕格采用了分带投影的方式,有6度分带和3度分带两种。
6度带自0度子午线起每隔经差6度自西向东分带,带号依次编为第 1、2 (60)带。
3度带是在6度带的基础上分成的,它的中央子午线与六度带的中央子午线和分带子午线重合,即自 1.5度子午线起每隔经差3度自西向东分带,带号依次编为三度带第 1、2…120带。
我国的经度范围西起73°东至135°,可分成六度带十一个,各带中央经线依次为75°、81°、87°、……、117°、123°、129°、135°,或三度带二十二个。
六度带可用于中小比例尺(如 1:250000)测图,三度带可用于大比例尺(如 1:10000)测图,城建坐标多采用三度带的高斯投影。
(3)高斯克吕格坐标高斯克吕格坐标中,纵坐标以赤道为零起算,赤道以北为正,以南为负。
我国位于北半球,纵坐标均为正值。
横坐标如以中央经线为零起算,中央经线以东为正,以西为负,为了避免横坐标出现负值,故规定将坐标纵轴西移500公里当作起始轴,凡是带内的横坐标值均加500公里。
由于高斯-克吕格投影每一个投影带的坐标都是对本带坐标原点的相对值,所以各带的坐标完全相同,为了区别某一坐标系统属于哪一带,在横轴坐标前加上带号,如(4231898m,21655933m),其中21即为带号。