高精度角度的测试
- 格式:pdf
- 大小:149.37 KB
- 文档页数:2
全站仪角度测量的方法步骤全站仪是一种广泛应用于土木工程、建筑测量等领域的高精度测量仪器。
它能够测量水平角、垂直角和斜距等参数,以获取目标点的三维坐标信息。
以下是使用全站仪进行角度测量的方法步骤:步骤一:设置全站仪在进行角度测量之前,首先需要设置全站仪。
将全站仪放置在测量现场的固定位置,并进行水平调准。
水平调准是为了使全站仪的水平轴与地面水平平面保持平行。
这可以通过使用调平仪或使用全站仪自带的水平调准功能来实现。
步骤二:设置目标点在测量现场中确定要测量的目标点。
目标点可以是建筑物的角点、测量桩或任何具有明确位置的物体。
确保目标点为你想要获得角度信息的位置。
步骤三:设置仪器将全站仪激活并进入角度测量模式。
在全站仪的显示屏上可以选择测量模式,以测量水平角度、垂直角度或斜距。
步骤四:目标点对准将测杆或测量标签放置于目标点上,并使用三脚架将其稳定。
确保测杆或测量标签正对全站仪。
步骤五:测量角度在全站仪上查找“角度测量”选项,并选择水平角、垂直角或斜距中的一个进行测量。
全站仪会自动测量角度,并在显示屏上显示测量结果。
步骤六:记录测量结果将测量结果记录在纸上或任何其他适合的介质上。
包括目标点的三维坐标值、水平角度、垂直角度和斜距等信息。
步骤七:移动测点如果需要测量多个目标点,重复步骤四至步骤六,将测杆或测量标签放置在下一个目标点上,测量并记录相应的角度信息。
根据需要,可以在不同的位置上设置多个目标点。
步骤八:精确性检查和校正在测量过程中,确保全站仪的仪器参数设置正确。
检查和校正这些参数可以提高测量结果的准确性。
常见的参数包括仪器高度、仰角和方位角等。
步骤九:结束测量完成所有目标点的测量后,确认所有数据都已记录完整。
关闭全站仪并收集测量设备。
总结全站仪是实现高精度角度测量的重要工具。
使用全站仪进行角度测量的过程包括设置仪器、设置目标点、目标点对准、测量角度、记录测量结果、移动测点、精确性检查和校正等步骤。
备注:以上内容仅供参考,具体操作请遵循使用全站仪的相关使用说明和操作规范。
请阐述分光仪测量角度的主要特点
1.高精度测量:分光仪可以提供非常高精度的角度测量,通常能够达到0.1度或更小。
这使得它成为精密测量和研究的理想工具。
2. 宽波长范围:由于使用了光学棱镜或光栅,分光仪可以测量
不同波长范围内的光线。
这使得它适用于不同的光学研究和应用领域。
3. 可重复性好:分光仪的角度测量结果具有良好的可重复性,
这意味着多次测量可以得到相同的结果。
这种可重复性使得分光仪成为科学实验和测试的可靠工具。
4. 适用于不同的样品类型:分光仪可以用于测量不同类型的样品,包括固体、液体、气体和粉末等。
这使得它成为材料科学、生命科学、化学和环境科学等领域的重要工具。
5. 易于操作:分光仪是一种相对易于使用的仪器。
它通常配备
有易于操作的控制面板和软件,使得用户可以轻松地进行角度测量和数据处理。
综合来看,分光仪具有高精度、宽波长范围、可重复性好、适用于不同的样品类型和易于操作等主要特点。
这些特点使得它成为科学和工业中必不可少的工具。
- 1 -。
高精度方位角测量的实用技巧与方法导语:方位角是地理测量中常用的一个概念,它用来描述一个点相对于参考方向的偏转角度。
在很多领域中,高精度的方位角测量是十分重要的,如航天、导航、测绘等等。
本文将介绍一些实用的技巧和方法,帮助读者获得准确、高精度的方位角测量结果。
一、方位角测量的基本原理方位角是一个点相对于某个参考方向的偏转角度,通常使用从参考方向开始,按逆时针方向测量的角度表示。
在测量中,方位角通常以度为单位进行表示,从0度(北方)开始,逆时针方向逐渐增大。
方位角的测量可以通过各种仪器和方法实现,下面将介绍一些常用的实用技巧和方法。
二、使用全站仪进行方位角测量全站仪是一种常见的用于测量方位角的仪器,它结合了经纬仪、水平仪和测距仪的功能。
使用全站仪进行方位角测量时,首先需要找到一个已知方向作为参考,例如建筑物的正北方向。
然后,将全站仪对准该方向,并进行校准。
接下来,点选所需测量的目标点,全站仪将自动记录角度和距离数据。
使用全站仪进行方位角测量可以获得较高的精度,但需要注意仪器的校准和操作规范。
三、使用全球定位系统(GPS)进行方位角测量全球定位系统(GPS)是一种卫星导航系统,可以用于测量方位角。
通过接收多颗卫星的信号,并使用三角测量原理,GPS可以确定位置坐标,并计算出与参考方向的方位角。
使用GPS进行方位角测量时,需要使用专业的GPS接收器进行定位和数据记录,并根据接收到的信号进行计算。
GPS测量方位角的优势在于其全球覆盖性和较高的精度,但在使用时需要注意天气和周围环境对信号的影响。
四、使用罗盘进行方位角测量罗盘是一种简单且常见的用于测量方位角的工具。
在使用罗盘进行方位角测量时,需要将罗盘对准所需测量的目标点,并注意罗盘的校准和使用方法。
罗盘通过指针指向地球磁北极,提供了一个相对于磁北的方向参考。
使用罗盘进行方位角测量需要考虑磁力线的影响,如大型金属物体或电磁设备可能干扰罗盘的读数。
因此,在进行方位角测量时,应选择较为开阔和无干扰的场地,并且进行罗盘的校准。

第37卷,增刊红外与激光工程2008年4月V ol.37SupplementInfrared and Laser EngineeringApr.2008收稿日期:2008-03-11作者简介:魏新武(),男,河南遂平人,高级工程师,主要研究方向为空空导弹红外导引技术。
@y 高频摆镜摆角的高精度测量魏新武,孟卫华,刘文武(中国空空导弹研究院,河南洛阳471009)摘要:对应用于线列扫描成像系统的高频高精度摆镜性能测试系统进行了研究,重点解决了摆镜摆角的高精度测量问题,对影响测试精度的关键因素进行了分析,并提出了相应的工程解决方案。
关键词:激光自准直测量;PSD ;角度测量;试精度。
中图分类号:TN206文献标识码:A文章编号:1007-2276(2008)增(几何量)-0035-04High precision angle measurement of high-frequency scanning mirrorWEI Xin-wu,MENG Wei-hua,LIU Wen-wu(China airborne mis sile acdemy,Luoyang 471009,Chi na)Abstr act:A perform ance testing system of the high-precision and high-frequency scanning mirror used in scanning infrared imaging system s is introduced in this paper.Focusing on the high precision angle measurement of the scanning mirror,this paper analyzes the key factors degrading measuring accuracy ,and puts forward the corresponding practical resolution.Key wor ds:Laser auto -collim ation m easurem ent;PSD;Angle measurem en t;Measuring accuracy0引言高频高精度摆镜是线列扫描成像系统的关键组成部分[1],摆镜摆动的线性度影响成像质量,重复性则影响成像稳定性。

高精度机器视觉三角形角度测量方法研究摘要:随着机器视觉技术的不断发展和应用,对于三角形角度的测量需求日益增加。
本文基于高精度机器视觉技术,研究了三角形角度测量方法,通过对三角形特征点的提取和处理,实现了对三角形角度的准确测量。
实验证明,该方法具有较高的准确度和稳定性,能够满足大多数实际应用的需求。
1. 研究背景三角形是几何学中最基本的形状之一,其角度的准确测量对于许多领域具有重要意义,如制造业、机器人导航和计算机辅助设计等。
传统的三角形角度测量方法主要依赖人工测量,存在主观性强、易引入误差和效率低等问题。
随着机器视觉技术的快速发展,利用计算机视觉方法实现高精度三角形角度测量成为可能。
2. 方法介绍(1)特征点提取:利用机器视觉算法提取三角形图像上的特征点,可采用传统的角点检测算法或深度学习方法。
特征点的准确提取是后续测量的基础,需要通过优化算法参数或数据预处理等手段提高提取的准确性和稳定性。
(2)特征点匹配:通过特征点的匹配,将三角形的特征点与模板进行对应,建立特征点之间的联系,并计算特征点之间的距离和角度。
(3)角度计算:根据特征点之间的距离和角度的计算公式,计算三角形的角度。
常用的计算公式包括余弦定理和正弦定理等。
(4)误差补偿:由于机器视觉系统本身存在精度误差,需要进行误差补偿。
可以通过标定相机参数、校正图像畸变等方法,提高测量的准确性。
3. 实验设计(1)设备和软件:使用高性能的机器视觉设备,搭配适当的图像处理软件,实现三角形角度测量。
(2)实验样本:准备一批具有不同尺寸和形状的三角形样本,包括等边三角形、直角三角形和一般三角形等。
(3)实验步骤:首先对样本进行图像采集和预处理,然后使用提取特征点的算法对图像进行处理,建立特征点之间的联系,最后计算三角形的角度并进行误差补偿。
(4)实验参数:调整和优化特征点提取算法的参数,控制实验的环境,如光照条件和距离等。
(5)实验数据分析:对实验得到的数据进行统计分析,评估该方法的测量准确性和稳定性。
角度尺技术参数
角度尺是一种测量工具,用于测量角度的大小和位置。
它由两个臂组成,一端固定在一个基座上,另一端可以旋转。
角度尺有不同的大小和精度,通常用于工程、建筑、制造和科学等领域。
技术参数是描述角度尺性能的参数,包括测量范围、精度、重量、尺寸和材质等。
常见的角度尺参数如下:
1. 测量范围:角度尺的测量范围通常为0度到360度,也有一些角度尺可以测量更大的范围,如720度。
2. 精度:角度尺的精度通常为0.1度或0.05度,高精度的角度尺可以达到0.01度。
3. 重量:角度尺的重量通常在几百克到几千克之间,与尺寸和材料有关。
4. 尺寸:角度尺的尺寸通常在几厘米到几十厘米之间,包括臂长、基座大小和厚度等。
5. 材质:角度尺的材质通常为金属,如铝合金、不锈钢和钛合金等,也有一些角度尺使用塑料材料。
除了上述参数,角度尺还有一些特殊功能,如数字显示、数据存储和通信功能等。
这些功能可以提高角度尺的使用效率和便捷性,满足不同领域的需求。
- 1 -。
牛顿环实验中的角度测量提高实验精度的方法牛顿环实验是一种常见的测量薄透镜曲率半径的实验方法。
在进行这一实验过程中,角度测量是非常重要且关键的一步。
本文将介绍一些可以提高实验精度的角度测量方法。
一、背景介绍牛顿环实验是通过在透明平凸透镜和平凹透镜之间形成干涉环,并观察和测量干涉环的半径来确定薄透镜的曲率半径。
而角度测量是实验的核心环节之一,直接影响测量结果的精确度和准确性。
二、角度测量方法1. 望远镜法望远镜法是一种传统而常用的牛顿环实验角度测量方法。
它利用望远镜对干涉环的观察,通过调整镜筒转动的角度,使干涉环在镜筒水平方向移动一定距离,再用米尺测量移动的距离,从而计算出旋转的角度。
这种方法精度较低,主要是由于对人眼的观察和读数精度的限制。
2. 干涉图像处理随着计算机技术的进步,干涉图像处理方法被广泛应用于牛顿环实验中的角度测量中。
通过数字图像处理技术,可以将干涉图像转化为数字图像,然后使用图像处理软件进行测量和分析。
这种方法可以提高实验的准确性和可重复性。
3. 光电检测器法光电检测器法是一种利用光电传感器对干涉环信号进行测量的方法。
通过光电检测器检测干涉环的强度变化,进而得到角度信息。
这种方法具有高精度、高灵敏度和快速测量的特点,适用于需要高精度角度测量的实验。
4. 激光干涉仪法激光干涉仪法是一种高精度的角度测量方法。
它利用激光干涉的原理,通过测量干涉环的光程差来确定角度。
这种方法具有测量精度高、分辨率高、稳定性好的特点,在一些精密实验中得到广泛应用。
三、实验精度的影响因素除了选择合适的角度测量方法外,还有一些其他因素会影响牛顿环实验的精度。
1. 光源选择光源的选择对实验精度有很大影响。
一般情况下,使用单色光源(如氦氖激光器)可以减小干涉环的失真和形状畸变,提高测量结果的准确性。
2. 实验环境实验环境的稳定性对实验结果的精度也具有重要影响。
保持实验装置的稳定,避免振动和温度变化等因素的干扰,可以提高实验的准确性。
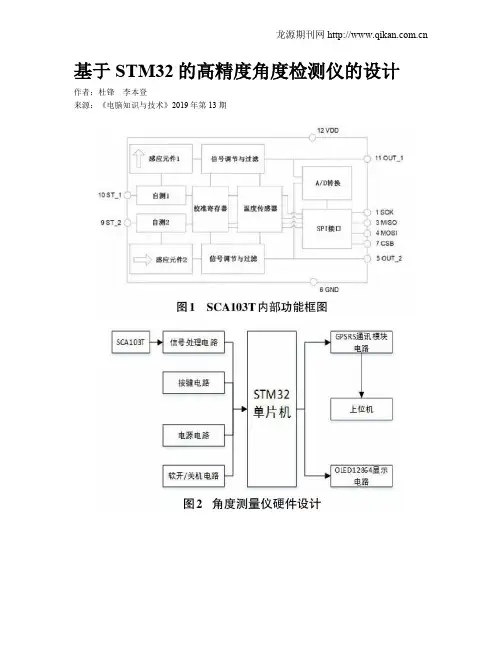
基于STM32的高精度角度检测仪的设计作者:杜锋李本登来源:《电脑知识与技术》2019年第13期摘要:针对现有角度测量装置测量精度低,实时数据差,抗冲击能力弱,测量环境灵敏度差,可操作性差的问题,采用 STM32高性能单片机设计了高精度角度测量仪,通过角度测量电路,补偿电路和 GPRS无线通讯电路的设计。
实现了通过GPRS无线数据传输从角度数据收集和存储数据到客户端的功能。
有效地提高了角度测量的效率。
高精度单轴测斜仪SCA103T 作为角度传感器,提高了测量的精度和灵敏度。
关键词:STM32;高精度;无线数据传输;SCA103T中图分类号:TP311 ; ; ; ;文献标识码:A文章编号:1009-3044(2019)13-0245-021 项目背景角度计用作许多控制系统中的瞄准部件的手段。
在过往的控制系统中,大都是靠操作人员的经验或者利用传统的机械式测角仪,传统的机械式测角仪利用分度盘来进行角度测量,而分度盘不能无限增加,从而受到限制,严重影响控制系统的测量要求。
角度测量仪可以方便地显示前后角度差,减少了工人的专业要求,提高了生产效率,有利于提高产品质量和安全性。
因此,有必要研究一种合适的角度测量方法。
本项目主要应用于桥梁建设打桩垂直度的测量、具有很强的实用价值。
由于之前的产品测量精度只能达到±0.01º,不能满足用户对角度测量精度的要求。
因此,通过本创新项目,能够提升角度测量精度。
2 设计方案角度测量是计量科学的重要组成部分,广泛应用于工业领域。
本文所描述的角度测量仪使用STM32F103作为数据处理的核心单元。
这是一款带有Cortex-M内核的低功耗,高速度的32位处理器。
角度测量模块使用的是高精度、低功耗角度传感器 SCA103 T,能将角度转换成16位数字输出或-5 V~+5 V的直流电压输出,对应的测量角度为-15º~+15º,通过给定的算法和数字低通滤波后即可计算出当前的倾斜角度值。
三坐标角度测量方法三坐标角度测量是指使用三坐标测量仪测量物体的角度。
三坐标测量仪是一种高精度的测量仪器,可通过测量物体的三维坐标来确定其位置和形状。
角度测量在工程、制造和科学研究中具有重要的应用价值。
本文将介绍三坐标角度测量的原理、方法以及一些注意事项。
一、原理1.空间直角坐标系:三坐标测量仪中包含三个测量轴,分别对应于空间直角坐标系的X轴、Y轴和Z轴。
通过测量物体在这三个轴上的坐标值,可以确定物体在空间中的位置。
2.测量仪的旋转:三坐标测量仪可以通过水平旋转和垂直旋转来改变测量仪的工作方向。
在测量过程中,可以通过控制测量仪的旋转角度来获取物体的角度信息。
3.数学计算:通过测量物体在不同方向上的坐标值,可以利用三角学和向量运算等数学方法计算出物体的角度信息。
二、方法1.基于旋转轴的角度测量:这是一种直接测量物体旋转角度的方法。
首先,固定一个参考点,将测量仪的旋转轴与物体的旋转轴对齐。
然后,通过旋转测量仪,记录测量仪的旋转角度。
测量仪的旋转角度即为物体的角度。
这种方法适用于旋转轴明确的物体,如转轴、角度测量仪等。
2.基于坐标变换的角度测量:这是一种间接测量物体角度的方法。
首先,测量物体在坐标系上的一系列点。
然后,通过坐标变换和数学计算,将物体的点云数据转换为一组面片或曲线。
最后,通过计算面片或曲线的法线向量,可以确定物体的角度信息。
这种方法适用于各种形状的物体,如复杂曲面、三维模型等。
三、注意事项在进行三坐标角度测量时1.测量环境:三坐标测量仪对测量环境有一定要求。
应在稳定、无振动的环境中进行测量,以确保测量结果的准确性。
2.测量精度:三坐标测量的精度受到多种因素的影响,如仪器本身的精度、测量过程中的误差等。
在进行测量时,应尽量采取措施减小误差,如适当延长测量时间、加大测量点数等。
3.选取测量方案:根据实际情况选择合适的测量方案。
不同的物体形状和测量需求可能需要不同的测量方案,应根据具体情况进行选择。
全站仪角度测量的操作步骤引言全站仪是一种广泛应用于土木工程、建筑工程和测绘工程等领域的高精度角度测量仪器。
它具有快速、精确和方便灵活等优点,成为现代测量工作中不可或缺的设备之一。
本文将详细介绍如何使用全站仪进行角度测量的操作步骤。
步骤一:准备工作在开始全站仪角度测量之前,我们需要进行一些准备工作:1.检查全站仪的电池电量,确保其充足。
如果电池电量不足,应及时更换或充电。
2.确保全站仪的固定装置(三脚架)稳固可靠,以保证测量过程中的稳定性。
3.清洁全站仪的镜片和测距仪,确保其工作正常并没有污染物影响。
步骤二:设置全站仪接下来,我们需要设置全站仪以确保测量的准确性和精度:1.将全站仪安装在三脚架上,并通过螺丝将其牢固固定。
调整三脚架的水平度,确保全站仪在水平状态下。
2.打开全站仪电源,等待其系统启动。
根据使用说明书,设置全站仪的工作模式和测量单位。
步骤三:测量目标点在进行全站仪角度测量之前,我们需要选择目标点,并进行以下操作:1.使用全站仪的望远镜,观察目标点,并通过调节焦距和放大倍率,确保目标点清晰可见。
2.使用全站仪的测距仪,测量目标点与全站仪的距离,并将其记录下来。
步骤四:测量角度现在,我们可以开始使用全站仪进行角度测量了:1.通过观察目标点,将全站仪望远镜对准目标点。
2.利用全站仪的水平仪和垂直仪,调整仪器的水平度和垂直度。
3.按下全站仪的测量按钮,进行角度测量。
在每次测量之前,应确认测量仪器稳定后再进行。
4.根据全站仪的显示屏上的测量结果,记录下测量的角度数值。
步骤五:数据处理完成角度测量后,我们需要对所得到的数据进行处理和分析:1.将角度测量结果输入到计算机或其它数据处理设备中。
2.使用专业的测绘软件或数据处理工具,对测量数据进行进一步的处理和分析。
例如,可以计算不同测点之间的角度差、方位角等。
结论通过以上步骤,我们可以完成全站仪角度测量的工作。
全站仪作为一种高精度角度测量仪器,为各种工程测量提供了可靠的支持。
高精度的三角测量方法与注意事项一、引言三角测量是一种常用的测量方法,广泛应用于航海、土地测量、地震勘测等领域。
在过去的几十年里,随着测量仪器的不断更新和测量技术的发展,三角测量的精度和准确度得到了显著提升。
本文将介绍一些高精度的三角测量方法,并探讨在进行三角测量时需要注意的事项。
二、高精度的三角测量方法1. 多边形闭合法多边形闭合法是一种常用的三角测量方法,适用于较小的区域。
其主要思想是通过测量多个三角形的边长和内角,来计算出目标区域的各个点的坐标。
为了提高精度,可以采用闭合余差法进行误差校正,使得各测量结果更加准确。
2. 多基线法多基线法是一种适用于大区域测量的方法。
通过设置多个基线,并分别测量各个基线之间的夹角和边长,可以计算出目标区域各个点的坐标。
在使用多基线法进行三角测量时,需要特别注意测量仪器的精度和基线长度的选择,以提高测量结果的准确度。
3. 全站仪法全站仪是一种先进的测量仪器,具有高精度的角度和距离测量功能。
全站仪法适用于大面积、复杂地形的测量工作。
在使用全站仪进行三角测量时,需要注意仪器的校准和使用方法,以保证测量结果的准确性。
三、三角测量注意事项1. 仪器校准在进行三角测量之前,务必进行仪器的校准。
仪器的精度和准确度将直接影响到最终的测量结果。
校准过程包括水平仪的校准、距离计的校准以及角度测量的校准等。
只有仪器校准正确无误,才能保证测量结果的准确性。
2. 测量环境三角测量需要在特定的环境条件下进行。
例如,在较大风力下进行测量可能会导致仪器晃动,从而影响测量结果的准确性。
因此,在进行三角测量时,需要选择风力较小的时间和地点,并采取适当的防风措施。
3. 观测角度观测角度的选取对三角测量结果的精度和准确度有重要影响。
通常情况下,大角度的观测结果较不精确,而小角度的观测结果较为准确。
因此,在进行三角测量时,应尽量选择较小的观测角度,以提高测量结果的精度。
四、结论通过了解高精度的三角测量方法和注意事项,我们可以更好地进行三角测量工作。
角度和锥度测量方法探讨角度和锥度是机械加工中常用的两个参数,它们的测量对于保证加工质量和精度至关重要。
本文将探讨角度和锥度的测量方法。
一、角度测量方法1. 角度尺测量法角度尺是一种常用的角度测量工具,它可以直接读取角度值。
使用时,将角度尺放置在待测角度上,读取刻度值即可。
角度尺的精度一般为0.1度,适用于一般精度要求的角度测量。
2. 万能角度尺测量法万能角度尺是一种功能更加强大的角度测量工具,它可以测量各种形状的角度。
使用时,将万能角度尺放置在待测角度上,调整尺子的形状,使其与待测角度吻合,读取角度值即可。
万能角度尺的精度一般为0.05度,适用于高精度要求的角度测量。
3. 光学投影仪测量法光学投影仪是一种高精度的角度测量工具,它可以测量各种形状的角度,并且具有高精度和高效率的特点。
使用时,将待测工件放置在投影仪上,通过光学放大和投影,可以直接读取角度值。
光学投影仪的精度一般为0.01度,适用于高精度要求的角度测量。
二、锥度测量方法1. 锥度规测量法锥度规是一种常用的锥度测量工具,它可以直接读取锥度值。
使用时,将锥度规放置在待测锥度上,读取刻度值即可。
锥度规的精度一般为0.01mm/m,适用于一般精度要求的锥度测量。
2. 万能锥度规测量法万能锥度规是一种功能更加强大的锥度测量工具,它可以测量各种形状的锥度。
使用时,将万能锥度规放置在待测锥度上,调整尺子的形状,使其与待测锥度吻合,读取锥度值即可。
万能锥度规的精度一般为0.005mm/m,适用于高精度要求的锥度测量。
3. 光学投影仪测量法光学投影仪也可以用于测量锥度,使用方法与角度测量类似。
将待测工件放置在投影仪上,通过光学放大和投影,可以直接读取锥度值。
光学投影仪的精度一般为0.001mm/m,适用于高精度要求的锥度测量。
综上所述,角度和锥度的测量方法有多种,选择合适的测量工具和方法可以保证加工质量和精度。
在实际应用中,应根据具体情况选择合适的测量方法,并注意测量精度和误差控制。
高精度角度光学元件超光滑表面的加工和检测技术研究的开题报告一、选题背景和研究意义随着现代光学技术的飞速发展,越来越多的光学元件被广泛应用在精密仪器、航天、军事等领域。
其中,高精度角度光学元件的需求越来越大,如图形补偿器、准直器、倾斜镜等元件,其精度和稳定性直接影响到光学系统的质量。
而对于这些元件的制造和检测迫切需要解决的是如何实现超精密的加工技术和高精度的检测方法。
目前,国内外对于高精度角度光学元件的加工和检测技术研究已有很多的实践和理论经验,但是,仍然存在一些困难和挑战,如制造成本高、表面质量不稳定等。
因此,本课题旨在研究高精度角度光学元件超光滑表面的加工和检测技术,以提高光学元件的制造质量和效率,为光学系统的应用提供更好的技术支持。
二、研究内容和方案1. 研究现有高精度角度光学元件加工和检测技术的发展历程及优缺点,分析其适用范围和局限性;2. 研究超光滑表面的制备技术,设计合理的工艺流程和工艺参数,并探究加工过程中的不良影响因素和解决方案;3. 建立高精度角度光学元件表面质量检测系统,探究适用于超光滑表面的检测方法和技术,并制定可靠的质量控制方案;4. 对比不同加工工艺和检测方法的优缺点,探究适用于高精度角度光学元件的加工和检测技术。
三、预期目标和意义1. 建立适应于高精度角度光学元件的超光滑表面加工技术和表面质量检测技术,提高产品的生产精度和质量。
2. 探究适用于高精度角度光学元件的加工和检测技术,为相关行业提供技术支持和指导,促进该领域的发展。
3. 向相关学科领域提供有益的研究成果和经验,推动相关学科的研究和发展。
四、研究方法和计划1. 分析现有的高精度角度光学元件加工和检测技术,总结其优缺点和不足之处,寻找改进和创新的方向;2. 研究超光滑表面的制备工艺及不良影响因素,进行仿真和实验验证,完善优化工艺流程和参数;3. 设计并建立适应于高精度角度光学元件的表面质量检测系统,并对其进行测试验证;4. 对比不同加工工艺和检测方法的优缺点,制定可靠的质量控制方案;5. 撰写论文并撰写开题报告。
高精度测绘技术的原理与方法导语:高精度测绘技术是指通过精密的测量手段以及先进的测量设备,对地球表面进行精确测绘的一种技术。
本文将深入探讨高精度测绘技术的原理与方法,以及其在各个领域的应用。
1. 全球定位系统(GPS)的原理全球定位系统是高精度测绘技术中最常用的一种方法。
它通过在地球上安装多个卫星,并使用接收器接收这些卫星发出的信号,从而确定地球上某一点的位置坐标。
GPS的原理基于卫星发射的信号的时间延迟,接收器通过计算信号延迟的时间差,便可确定其所处的位置。
2. 激光测距仪的原理激光测距仪是高精度测绘技术中另一种常用的方法。
它通过发射一束激光,然后测量激光从发射点到目标点的行进时间,从而计算出目标点的距离。
激光测距仪利用激光的高度聚焦性能和高频率的振荡特性,能够实现极高的测距精度。
3. 高精度角度测量的方法在高精度测绘中,角度的测量是至关重要的。
为了获得更精确的角度测量结果,现代测量仪器常常采用陀螺仪和电子罗盘等技术。
陀螺仪通过测量旋转物体的角速度,从而确定其空间方向。
而电子罗盘则基于地球的磁场来测量方位。
这些技术的应用,大大提高了高精度测绘的精准度。
4. 数据处理与地图生成高精度测绘技术的数据处理是保证精度和质量的重要环节。
测绘专业人员使用专门的软件和算法来处理原始数据,进行纠偏、滤波、配准和拟合等操作,以提高数据的精确性和准确性。
通过数据处理,测绘人员可以生成高精度的地图,用于各种领域的应用。
5. 高精度测绘技术在城市规划中的应用高精度测绘技术在城市规划中发挥着重要作用。
通过高精度测绘技术,可以获取城市道路、建筑物等空间要素的精确位置和几何形状信息。
这些数据可以用于城市规划、土地管理以及灾害风险评估等领域。
例如,城市规划师可以利用高精度测绘技术获得的数据,进行城市基础设施的规划和设计。
结语:高精度测绘技术的原理与方法涉及了多个学科领域,包括测量学、地理信息系统和工程学等。
通过全球定位系统、激光测距仪以及高精度角度测量等技术手段,可以获得地球表面的精确测量数据。