基于光滑攻角剖面的高超声速滑翔飞行器下降段轨迹设计
- 格式:pdf
- 大小:1.14 MB
- 文档页数:5
收稿日期:2018-02-10修回日期:2018-04-12基金项目:全军军事类研究生基金资助项目(2015JY465)作者简介:韩春耀(1989-),男,河北冀州人,博士研究生。
研究方向:预警情报分析与应用。
熊家军,男,教授,博士生导师。
*摘要:针对轨迹预测在目标交接班和基于预测命中点拦截制导中的应用需求,分析了高超声速滑翔飞行器滑翔段轨迹预测的可行性。
结合典型高超声速滑翔飞行器的运动轨迹,分析了其运动轨迹特性、机动模式、转弯半径、最大射程以及可达区域,提出了基于不变力预测法的轨迹预测思路。
认为高超声速滑翔飞行器在滑翔段,运动轨迹几何特征明显、转弯半径大、保持大升阻比,便于实施中长期轨迹预测,但难以实现全程预测。
关键词:高超声速滑翔飞行器,轨迹预测,运动特性,机动模式,可达区域中图分类号:TJ761.9文献标识码:ADOI :10.3969/j.issn.1002-0640.2019.02.017引用格式:韩春耀,熊家军,张凯,等.高超声速滑翔飞行器轨迹预测分析[J ].火力与指挥控制,2019,44(2):80-85.高超声速滑翔飞行器轨迹预测分析*韩春耀,熊家军,张凯,兰旭辉(空军预警学院,武汉430019)Trajectory Prediction Analysis for Hypersonic Glide VehicleHAN Chun-yao ,XIONG Jia-jun ,ZHANG Kai ,LAN Xu-hui(Air Force Early Warning Academy ,Wuhan 430019,China )Abstract :Aiming at the application requirements of trajectory prediction in early warning detection system target handover and interception guidance based on predictive hit point ,the feasibilityof trajectory prediction of hypersonic glide vehicle in gliding section is analyzed.Trajectory characteristics ,maneuver mode ,turning radius ,maximum range and landing footprint area are analyzed based on the trajectory of typical hypersonic glide vehicle ,and trajectory prediction method based on invariant force prediction method is proposed.The results show that the trajectory has obvious geometric characteristics ,turning radius is greater than 200km and it maintains high lift ratio in glide section ,which contribute to implement the medium and long term trajectory prediction ,but it isdifficult to realize the whole forecast.Key words :hypersonic glide vehicle ,trajectory prediction ,motion characteristic ,maneuver pattern ,landing footprintCitation format :HAN C Y ,XIONG J J ,ZHANG K ,et al.Trajectory prediction analysis for hypersonic glide vehicle [J ].Fire Control &Command Control ,2019,44(2):80-85.0引言临近空间高超声速飞行器作战方式复杂、飞行空域特殊、机动样式独特,已成为改变当今世界作战规则的新型战略威胁目标。

第42卷第5期国 防 科 技 大 学 学 报Vol.42No.52020年10月JOURNALOFNATIONALUNIVERSITYOFDEFENSETECHNOLOGYOct.2020doi:10.11887/j.cn.202005017http://journal.nudt.edu.cn高超声速滑翔飞行器滑翔段初始状态的唯一性和最优性分析孟繁卿1,田康生2(1.空军预警学院研究生大队,湖北武汉 430019;2.空军预警学院预警情报系,湖北武汉 430019)摘 要:临近空间高超声速滑翔飞行器的弹道特性主要受滑翔段初始状态和飞行器控制律影响。
在飞行器控制律确定的情况下,研究了滑翔段初始状态对高超声速滑翔飞行器弹道特性的影响规律。
按照滑翔弹道的不同形式,在纵向平衡滑翔条件下,通过理论推导得出飞行器状态变量的解析式,结合平衡滑翔条件分析平衡滑翔弹道滑翔段初始状态的唯一性;在纵向跳跃滑翔条件下,构建弹道性能评价指标,利用群智能算法,寻找弹道性能最优时的滑翔段初始状态。
利用单因素敏感性分析方法,分别对两种滑翔弹道的滑翔段初始状态进行敏感性分析,初始状态中初始速度对弹道特性的影响最大。
对高超声速滑翔飞行器初始状态唯一性与最优性的分析,可为高超声速滑翔飞行器的弹道设计、弹道跟踪、轨迹预测和轨迹优化提供借鉴。
关键词:高超声速;纵向滑翔;初始状态;唯一;最优;敏感性中图分类号:V412.4 文献标志码:A 文章编号:1001-2486(2020)05-115-11AnalysisofuniquenessandoptimalityofglidesegmentinitialstateforhypersonicglidevehicleMENGFanqing1,TIANKangsheng2(1.DepartmentofGraduates,AirForceEarlyWarningAcademy,Wuhan430019,China;2.EarlyWarningIntelligenceDepartment,AirForceEarlyWarningAcademy,Wuhan430019,China)Abstract:Thetrajectorycharacteristicsofthenear-spacehypersonicglidevehiclearemainlyundertheinfluenceoftheinitialstateofglidesegmentandcontrollawofthevehicle.Therefore,theinfluenceofglidesegmentinitialstateontrajectorycharacteristicsofhypersonicglidevehiclewasstudiedundertheconditionthatthecontrollawofvehicleisdetermined.Accordingtothedifferentformsofglidetrajectory,undertheconditionoflongitudinalequilibriumglide,theanalyticalformulaofthevehiclestatevariablewasderivedtheoretically,andtheuniquenessofinitialstateoftheequilibriumglidetrajectorywasanalyzedincombinationwiththeequilibriumglidecondition.Undertheconditionoflongitudinalskipglide,theevaluationindicesoftrajectoryperformancewereconstructed,andtheinitialstateofglidesegmentwithoptimaltrajectoryperformancewasfoundbyusingthegroupintelligencealgorithm.Throughthesinglefactorsensitivityanalysis,thesensitivityanalysisoftheinitialstatesoftwoformsofglidetrajectorywascarriedout,andtheinitialvelocityofinitialstatehasthegreatestinfluenceonthetrajectorycharacteristics.Theanalysisoftheuniquenessandoptimalityofinitialstatecanbeusedforreferenceinthetrajectorydesign,trajectorytracking,trajectorypredictionandtrajectoryoptimizationofhypersonicglidevehicle.Keywords:hypersonic;longitudinalglide;initialstate;unique;optimal;sensitivity 临近空间高超声速滑翔飞行器通常是指飞行马赫数大于5、在距地面20~100km的高度依靠空气动力滑翔的一种飞行器。

硕士学位论文基于高度-速度剖面的再入轨迹规划与跟踪控制Re-entry trajectory planning and tracking control based onheight-velocity profile作者姓名:聂振焘学科、专业:航空宇航科学与技术学号: 21703219指导教师:周文雅完成日期: 2020年5月14日大连理工大学Dalian University of Technology大连理工大学学位论文独创性声明作者郑重声明:所呈交的学位论文,是本人在导师的指导下进行研究工作所取得的成果。
尽我所知,除文中已经注明引用内容和致谢的地方外,本论文不包含其他个人或集体已经发表的研究成果,也不包含其他已申请学位或其他用途使用过的成果。
与我一同工作的同志对本研究所做的贡献均已在论文中做了明确的说明并表示了谢意。
若有不实之处,本人愿意承担相关法律责任。
学位论文题目:基于高度-速度剖面的再入轨迹规划与跟踪控制作者签名:日期: 2020 年 6 月 6 日大连理工大学硕士学位论文摘要无动力升力式再入航天器因其具有速度快、航程远、机动性强等优势,成为了航空航天领域竞相发展的热点。
其技术发展将会对未来军事发展战略、防御体系构建产生深远影响。
这种航天器在再入过程中受到驻点热流、动压、过载等多方面约束,参考轨迹以及轨迹跟踪控制律的设计是再入任务能否顺利完成的关键。
本文以通用航空器(Common Aero Vehicle, CAV)为对象,研究了再入轨迹规划及轨迹跟踪控制问题,主要内容包括以下几个方面:1)在参考轨迹规划方面,提出了直接在高度-速度剖面内进行再入参考轨迹规划的方法。
通过预先设定攻角剖面以及过程约束最大允许值,将过程约束转换为高度-速度剖面内的再入轨迹下边界,并通过搜索下边界上增量的方法获得再入参考轨迹。
过程约束由于增量为正而得到满足;终端约束通过调整增量的大小得到满足。
2)基于改进的人工势能场法研究了存在地理约束的轨迹规划算法。

基于智能图搜索的滑翔式高超声速飞行器路径规划方法
张文敏;王剑颖
【期刊名称】《飞控与探测》
【年(卷),期】2022(5)6
【摘要】研究了高超声速飞行器在线路径规划问题。
首先建立滑翔式高超声速再入飞行器动力学模型,在此基础上综合考虑高超声速飞行器在飞行过程中的动压约束、热流约束、过载约束等,对动力学模型进行解析计算,分析再入走廊,并进一步分析形成滑翔式高超声速飞行器的覆盖区域。
基于飞行器覆盖区域并结合工程应用需求,提出了速度分段的高超声速飞行器可达区域计算方法,以确定在不同终端速度约束下的高超声速飞行器可抵达区域。
并以此为基础,以各个速度分段的终端速度为节点,提出了基于启发式路径搜索算法的分段路径规划方法,通过变步长图搜索算法可在飞行过程中在线确定各个速度分段区间的终点,完成分段路径搜索规划。
最后通过数值仿真验证了所提路径规划方法的有效性,结果表明,该方法计算效率高,能够有效规划高超声速飞行器的机动飞行轨迹,具有一定的工程应用前景。
【总页数】13页(P80-92)
【作者】张文敏;王剑颖
【作者单位】中山大学航空航天学院
【正文语种】中文
【中图分类】V249.1
【相关文献】
1.基于物理规划的高超声速飞行器滑翔式再入轨迹优化
2.高超声速滑翔式飞行器目标覆盖范围的计算方法
3.基于Gauss伪谱方法的高超声速滑翔飞行器滑翔段轨迹优化
4.基于自适应多通道交互式多模型的高超声速滑翔飞行器跟踪方法
5.一种高超声速滑翔飞行器轨迹智能预测方法
因版权原因,仅展示原文概要,查看原文内容请购买。

高超声速滑翔飞行器变轨段自适应跟踪制导方法何睿智;刘鲁华;汤国建;包为民【摘要】According to the trajectory tracking problem of hypersonic glide vehicle under great deviation conditions,a new adaptive tracking guidance method in the injection phase was put forward based on the adaptively revised weighting matrix.The main control mode and standard trajectory characteristics were analyzed.The simplified longitudinal motion equations were linearized near the standard trajectory.An improved adaptive tracking guidance method was designed by introducing the error term in linear quadratic performance index.The simulation results of CAV-H indicate that this method can achieve a great performance in adaptive tracking guidance in the injection phase,and has a good robustness to the initial and process deviation.%针对高超声速滑翔飞行器变轨段大偏差条件下的标准轨迹跟踪问题,提出一种基于权值矩阵自适应修正的变轨段跟踪制导方法。
高超声速助推-滑翔式飞行器中段弹道轨迹分析
徐申达;吴京;王雪莹
【期刊名称】《航天电子对抗》
【年(卷),期】2015(031)002
【摘要】提出了一种高超声速助推-滑翔式飞行器中段弹道轨迹设计方法,并对弹道特性进行了仿真.首先介绍了高超声速助推-滑翔式飞行器的概念和它的基本弹道轨迹,分析了传统轨迹设计中的不足.然后提出了一种机动程序和发动机短暂点火相结
合控制跃起,综合考虑实时精确的空气动力、地球引力以实现跳跃式飞行的弹道轨
迹设计方法,并在机动控制程序不变时对点火次数、点火高度和推力大小进行了弹
道仿真分析.仿真结果显示了该方法的可行性、整体设计上的优势以及在增大射程、提高突防能力上的性能优势.
【总页数】5页(P11-14,19)
【作者】徐申达;吴京;王雪莹
【作者单位】国防科技大学电子科学与工程学院,湖南长沙410073;国防科技大学
电子科学与工程学院,湖南长沙410073;国防科技大学电子科学与工程学院,湖南长沙410073
【正文语种】中文
【中图分类】V412.4
【相关文献】
1.高超声速滑翔式再入飞行器最大航程飞行轨迹分析 [J], 丁洪波;蔡洪;张士峰;李安梁
2.高超声速飞行器低可探测性滑翔弹道优化方法 [J], 黄浩; 丰志伟; 葛建全; 杨涛; 许强强
3.基于参考椭球的高超声速滑翔飞行器弹道仿真 [J], 冯耀;王红;曲智国;喻晨龙
4.高超声速滑翔飞行器弹道仿真分析 [J], 孟夏莹;杜君;刘健
5.高超声速飞行器动力滑翔组合弹道优化 [J], 魏继华;王兆魁
因版权原因,仅展示原文概要,查看原文内容请购买。
基于物理规划的高超声速飞行器滑翔式再入轨迹优化雍恩米;陈磊;唐国金【期刊名称】《航空学报》【年(卷),期】2008(029)005【摘要】轨迹优化是新型高超声速滑翔式再入飞行器方案设计的关键技术之一.物理规划方法能够以较低的计算代价获得设计者偏好的多目标优化问题的折中解.基于该方法研究滑翔式再入最优飞行轨迹.首先介绍物理规划方法求解多目标优化问题的数学模型,然后将考虑射程最大、热载最小、热流密度峰值最小和弹道最稳定4个目标的再入最优轨迹问题纳入物理规划的框架求解.以某带翼锥形再入飞行器为例,通过计算并分析单目标优化结果,确定具体的偏好结构,采用遗传算法求解了考虑热流、过载、动压和终端条件约束的多目标最优轨迹.优化计算结果验证了物理规划方法的有效性.分析了沿最优轨迹飞行的物理原因和基本迎角控制规律,可为滑翔式再入飞行器的最优轨迹方案设计提供依据.【总页数】7页(P1091-1097)【作者】雍恩米;陈磊;唐国金【作者单位】国防科技大学,航天与材料工程学院,湖南,长沙,410073;国防科技大学,航天与材料工程学院,湖南,长沙,410073;国防科技大学,航天与材料工程学院,湖南,长沙,410073【正文语种】中文【中图分类】V412.1【相关文献】1.高超声速滑翔式再入飞行器最大航程飞行轨迹分析 [J], 丁洪波;蔡洪;张士峰;李安梁2.高超声速滑翔式飞行器再入轨迹多目标多约束优化 [J], 陈小庆;侯中喜;刘建霞3.高超声速滑翔式飞行器突防轨迹优化研究 [J], 国海峰;黄长强;丁达理;肖红;强晓明4.基于Gauss伪谱方法的高超声速滑翔飞行器滑翔段轨迹优化 [J], 张鹏程;李新国5.基于拟能量的高超声速飞行器再入轨迹优化 [J], 孙勇;段广仁;张卯瑞;张泽因版权原因,仅展示原文概要,查看原文内容请购买。
高超声速滑翔目标多层递阶轨迹预测
张凯;熊家军
【期刊名称】《现代防御技术》
【年(卷),期】2018(046)004
【摘要】为给高超声速滑翔目标态势与威胁评估、拦截防御等提供先验知识,提出一种多层递阶轨迹预测方法.该方法借鉴多层递阶预测理论对预测模型进行随机补偿,将轨迹预测问题分解成气动参数和模型误差的混合预测以及在此基础上对目标轨迹的预测.方法首先利用气动参数增广状态向量进行动力学建模,对气动参数和模型误差进行混合估计,根据参数估计值进行时间序列预测.然后,在参数预测的基础上,利用动力学模型积分预测目标轨迹.仿真设计了2种有规律的飞行模式仿真场景,分析跟踪与预测时间对预测精度的影响,结果表明算法具有稳定可靠的轨迹预测能力.【总页数】7页(P92-98)
【作者】张凯;熊家军
【作者单位】空军预警学院研究生管理大队,湖北武汉430019;空军预警学院四系,湖北武汉430019
【正文语种】中文
【中图分类】V412.4;TP391.9
【相关文献】
1.应用边界交叉法的高超声速滑翔飞行器多目标轨迹优化 [J], 汪雷;葛健全;杨涛;丰志伟;李正楠
2.临近空间高超声速助推-滑翔式轨迹目标跟踪 [J], 张翔宇;王国宏;张静;刘源
3.基于意图推断的高超声速滑翔目标贝叶斯轨迹预测 [J], 张凯;熊家军;李凡;付婷婷
4.基于控制变量估计的高超声速再入滑翔目标轨迹预测算法 [J], 李世杰;雷虎民;周池军;张涛
5.变机动高超声速滑翔目标的轨迹序列预测算法 [J], 陈南华;赵良玉;雍恩米;娄泰山
因版权原因,仅展示原文概要,查看原文内容请购买。
2018年第3期 导 弹 与 航 天 运 载 技 术 No.3 2018 总第361期 MISSILES AND SPACE VEHICLES Sum No.361收稿日期:2017-06-23;修回日期:2017-09-19作者简介:李天任(1993-),男,硕士研究生,主要研究方向为飞行器制导与控制文章编号:1004-7182(2018)03-0010-05 DOI :10.7654/j.issn.1004-7182.20180302基于光滑攻角剖面的高超声速滑翔飞行器下降段轨迹设计李天任,雷建长,王宇航,周 华,黄 佩(中国运载火箭技术研究院研究发展中心,北京,100076)摘要:针对高超声速滑翔飞行器再入下降段轨迹对控制量剖面的光滑性要求,引入复合三角函数作为基函数,形成单波峰形式的攻角剖面。
该基函数具有形状可调节、导数连续且光滑等特点,采用改进的差分进化算法(Differential Evolution ,DE )对其进行参数优化,得到控制量曲线光滑,峰值热流、过载等指标减小的下降段平滑轨迹。
通过对比其他基函数的仿真结果,验证了新基函数与优化方法对改善下降段轨迹性能的有效性。
新基函数适合在高速、大动压情况下控制飞行器的姿态角,优化参数少,可以在其他场景中加以应用。
关键词:高超声速滑翔飞行器;下降段;光滑性;攻角剖面;差分进化算法 中图分类号:TJ765.2 文献标识码:ATrajectory Design in Descending Phase for Hypersonic Gliding VehicleBased on Smooth Angle of Attack ProfileLi Tian-ren, Lei Jian-chang, Wang Yu-hang, Zhou Hua, Huang Pei(R&D Center, China Academy of Launch Vehicle Technology, Beijing, 100076)Abstract: Aiming at the smoothness requirement to the control variables in reentry descending phase trajectory, the composite trigonometric function is introduced as the basis function to form the single peak angle of attack profile. This basis function has the characteristics of adjustable shape, continuous and smoothness and so on. The improved differential evolution algorithm is used to optimize function parameters, which can reduce the peak heat flux and overload with smooth control variable profile in the descending phase trajectory. By comparing the simulation results of other basis functions, we can verify the effectiveness of the new basis function and the optimization method to improve the trajectory performance of the descending phase. New basis function is fit for control vehicle attitude angles with high speed and high dynamic pressure, the optimal parameters is few, which can be used in other scenes.Key words: Hypersonic gliding vehicle ;Descending phase ;Smoothness ;Angle of attack profile ;Differential evolution algorithm0 引 言近年来,国内外学者对高超声速飞行器再入轨迹优化与制导开展了大量研究:一类是传统的返回舱式低升阻比再入飞行器,常采用倾侧角反转的轨迹优化和制导方法;另一类是近年来发展的高升阻比滑翔飞行器,一般采用攻角、倾侧角作为控制变量,通过设计两者在再入过程中随时间、速度、高度的变化规律来满足过程、终端状态约束,同时达到某一性能指标最优。
目前,离线进行优化的伪谱法是较为成熟的再入体轨迹设计方法。
伪谱法通过在整条轨迹的配点处离散,将再入动力学微分方程转化为代数方程,最后采用序列二次规划(Sequential Quadratic Programming ,SQP )等方法求解非线性规划问题。
其在单机上进行一次轨迹设计的计算时间较长,一般用于离线生成标称轨迹。
为了发挥高升阻比飞行器的在线机动能力,水尊师[1]和肖红[2]等人发展了基于航路点的局部预测校正制导方法,但其离线设计的航路点是固定的,削弱了飞行器轨迹的变更、再生成能力。
基于Harpold [3]的航天飞机再入轨迹设计思路,周浩[4]、李强[5]、刘运鹏[6]等人采用常值、分段线性等攻角设计方案,用于轨迹李天任等 基于光滑攻角剖面的高超声速滑翔飞行器下降段轨迹设计11第3期的初步设计和在线预测。
另一方面,胡锦川[7]的平稳滑翔轨迹以及张冉[8]均要求攻角曲线连续且可导,在使轨迹平稳的同时降低飞行器姿态控制器的设计要求。
下降段是再入飞行器进入大气层后的初始飞行阶段,也被称为引入段。
为了在下降段轨迹的设计中简化控制量曲线的设计,同时增强控制量剖面的光滑度,易于与平衡滑翔段轨迹光滑对接,除了现有的常值、分段线性以及复合指数函数的剖面设计方案外,有必要引入新的函数形式。
本文采用改进的复合三角函数,其具有幅值可调、波峰的位置和峰形可变、导数连续且光滑等优点,适合在控制量剖面设计中采用。
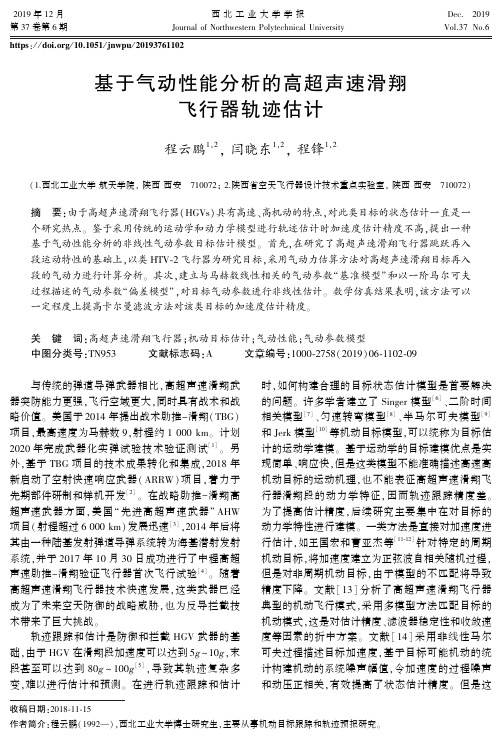
1 再入动力学模型针对无动力再入飞行器,在位置系下建立动力学模型,O-XYZ 为地心固连坐标系,将其绕Z 轴正向旋转经度θ,再绕新的Y 轴旋转纬度ϕ得到位置坐标系O-xyz ,如图1所示。
Fig.1 3D Motion Parameters Diagramr —地心距;θ—经度;ϕ—纬度;V —速度;γ—弹道倾角;ψ—航向角;M —飞行器采用圆球无旋地球假设,飞行器动力学方程[9]为22sin cos sin cos cos cos sin 1cos (1sin cos sin tan cos r V V r V r D Vg m L V g V m r L V V m r γγψθϕγψϕγσγγσψγψϕγ=⎧⎪⎪=⎪⎪⎪=⎪⎪⎨=−−⎪⎪⎡⎤⎪=−−⎢⎥⎪⎣⎦⎪⎪⎛⎞=+⎜⎟⎪⎝⎠⎩(1) 式中 r ,θ,ϕ,V ,γ,ψ分别为地心距、经度、纬度、速度、弹道倾角、航向角;g 为重力加速度;m 为飞行器质量;σ为倾侧角;L ,D 分别为升力和阻力,且,221212⎧=⎪⎪⎨⎪=⎪⎩L DL V S C D V S Cρρ (2) 式中 ρ为大气密度;S 为参考面积;L C ,D C 分别为升力系数、阻力系数。
m ,S ,,L D C C 均参考国外滑翔飞行器CAV-H ,m =907 kg ,S =0.4839 m 2。
对升力系数L C 和阻力系数DC 进行拟合,得到两者对攻角α的关系式[10]:0.046 750.105 68L C α=− (3) 20.0005080.0042280.0161D C αα=++ (4)在再入飞行器初始下降段,常采用零倾侧角、大攻角拉起的方案,在飞行器状态参数满足一定条件时,切换到平衡滑翔阶段,随后采用平衡滑翔段的攻角、倾侧角剖面。
本文采用的切换条件为221K γγε+≤ (5) 式中 1K 为弹道倾角的权系数;ε为一小量。
采用下降段零倾侧角、单波峰攻角剖面,平衡滑翔段的攻角剖面由拟平衡滑翔条件(Qusi Equilibrium Glide Condition ,QEGC )推导得到。
根据拟平衡滑翔条件:2cos 0⎛⎞+−=⎜⎟⎝⎠L V g m r γ (6) 根据当前状态已知的,,V r g ,联立式(2)、式(3)、式(6),得到拟平衡滑翔攻角QEGC α为2QEGC22cos V A m g r B V S Aγαρ⎛⎞−⎜⎟⎝⎠=− (7) 式中 A ,B 为式(3)中攻角的一阶项系数和常数项。
考虑到气动系数误差,在QEGC α上反馈弹道倾角的误差项*2()K αγγΔ=−,其中,*γ为平衡滑翔段跟踪的弹道倾角,2K 为反馈增益系数。
由于本文研究的重点不是平衡滑翔段,可取*γ=-0.05°,从而有:QEGC ααα=+Δ (8)仿真结果表明,该方法能够在考虑各项偏差的情况下生成拟平衡滑翔轨迹。
2 下降段控制量剖面设计方法2.1 下降段控制量设计思路下降段攻角剖面常采用最大攻角、分段线性等攻角方案[3~5],在与滑翔段的对接处难以连续和可导,使轨迹平稳性降低、同时对姿态控制器的设计提出了很导 弹 与 航 天 运 载 技 术 2018年12高要求。
此外,大量的弹道仿真表明不连续或不可导的控制量剖面常导致对接点过载和热流峰值较大,难以满足过程约束。
考虑在再入下降段采用改进的复合三角函数,以增强对接点光滑性、降低最大过载和热流峰值。
2.2 单波峰攻角剖面生成方法再入飞行器下降到一定高度,采用如下攻角时序:m ()sin[()]t F t αα= (9) 式中 m α为飞行器最大可用攻角。
根据CA V-H 的气动系数表[10],m α取20°,()F t 采用时间t 的二次多项式函数:20()i i i F t a t ==∑(10)通过调节多项式系数(0,1,2)i a i =来调整波长、波形和波峰位置,生成广义正弦函数簇,见图2。
图2 不同波长、波峰位置的三角函数簇Fig.2 Trigonometric Functions with Diffierent Wavelength and Peak Position2.3 搜索过渡点光滑的攻角剖面为了增强下降段与平衡滑翔段过渡点处的攻角剖面光滑性,需要优化控制下降段攻角剖面形状的(0,1,2)i a i =3个参数。