探地雷达工作原理图
- 格式:ppt
- 大小:752.50 KB
- 文档页数:1
RIS-地质雷达RIS探地雷达一、概述博泰克RIS探地雷达在兼具了传统探地雷达各项优点的同时,增添了高灵敏度、高分辨率的天线阵,使浅层和深层探测一次完成,实现了三维立体探测,大大提高了工作效率,具有数据采集完整、快速、低误差等特点。
适用于公路路面、隧道衬砌质量的检测、桥梁结构检测、路基检测、管线探测、岩性分析和条件恶劣场地的应用。
使用博泰克RIS天线阵雷达进行公路和隧道检测如图8-1所示。
图8-1 RIS探地雷达二、RIS K2主机技术参数1、扫描速度: 850扫/秒2、脉冲重复频率:400KHz3、时窗: 9999 nsec4、采样点数: 128-81925、叠加数: 1-327686、分辨率: 5psec7、工作温度:-10~50℃8、A/D转换: 16bit9、工作环境标准: IP6510、动态范围: >160dB11、信噪比: >160dB12、可连接8对天线同时测量13、尺寸:22x17x5.5cm,重量:1.2kg现场测量开始前应该对雷达的采集参数进行设定,这一工作最好在进入现场前在室内完成,进入现场后可根据情况略加调整。
参数设定的内容包括时间窗口大小、扫描样点数、每秒扫描数、A/D转换位数、增益点数等内容。
参数设置的是否合理影响到记录数据的质量,至关重要。
★探测深度与时窗长度探测深度的选取是头等重要的,既不要选得太小丢掉重要数据,也不要选得太大降低垂向分辨率。
一般选取探测深度H为目标深度的1.5倍。
根据探测深度H和介电常数ε确定采样时窗长度(Range/ns):Range= 2H(ε)1/2/0.3(ns)= 6.6 H(ε)1/2(ns)例如对于地层岩性为含水砂层时,介电常数为25,探测深度为3m时,时窗长度应选为100ns,时窗选择略有富余,宁大勿小。
★A/D采样分辨率:雷达的A/D转换有8Bit、16Bit、24Bit可供选用。
选择24Bit动态大,强弱反射信号都能记录下来,探测深度大、时窗长时采用。
三维探地雷达图谱识别技术在城市道路塌陷隐患检测中的应用摘要:城市地下病害体诱发的塌陷事故频繁发生,造成巨大的经济损失和不良社会影响。
地下病害体具有隐蔽性、突发性、难以提前预测等特点,为了提前发现、及时处置地下病害体,传统的路面结构病害检测属于破损性检测,耗费人力多、周期长、恢复交通慢。
本文应用三维雷达在检测路段的检测结果,分析三维雷达检测图谱中特征波形对应的病害类型,发现探地雷达方法对道路浅层隐蔽性病害体识别应用效果好,为相关部门制定针对性的处理措施提供依据和城市道路安全运行提供有力支撑。
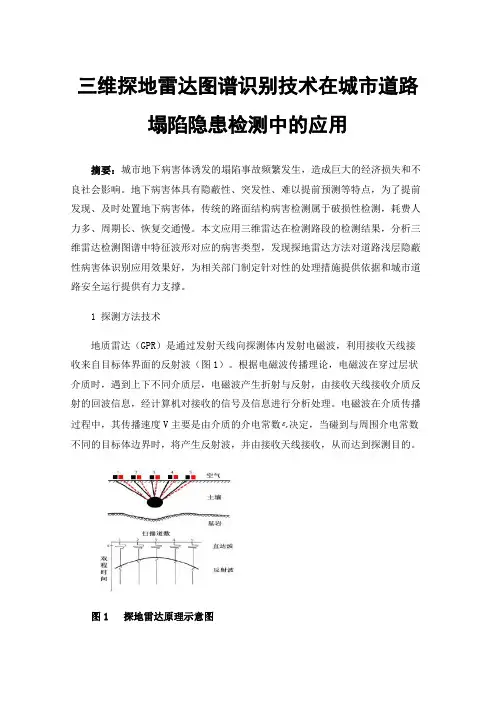
1 探测方法技术地质雷达(GPR)是通过发射天线向探测体内发射电磁波,利用接收天线接收来自目标体界面的反射波(图1)。
根据电磁波传播理论,电磁波在穿过层状介质时,遇到上下不同介质层,电磁波产生折射与反射,由接收天线接收介质反射的回波信息,经计算机对接收的信号及信息进行分析处理。
电磁波在介质传播过程中,其传播速度V主要是由介质的介电常数决定,当碰到与周围介电常数不同的目标体边界时,将产生反射波,并由接收天线接收,从而达到探测目的。
图1 探地雷达原理示意图2 数据处理、解译为突出有效波,提高雷达记录的信噪比和分辨率,提供和显示记录中包含的与地下目标体的位置、形态、结构和属性等有关的信息,通常采用的数据处理方法有:去除直达波、时间滤波、背景去除、时间增益、通过对处理后的雷达数据体进行针对性的切割,即可得到地下异常体或目标体的轮廓、位置等多种地下信息,取得可靠的检测成果。
3 地下病害体分类及地质雷达图谱特征地下病害体主要有脱空、空洞、疏松体和富水体等类型,不同的地下病害在地质雷达剖面上有不同的特征,具体图谱特征见表1。
表1地下病害体的地质雷达图谱特征(1)正常路面基层的标准雷达异常图像由于路面为层状结构,每一层铺筑的材料具有一定的介电性差异,因此,对于正常路面基层的雷达异常图像的波相同相轴或色谱图将呈现为近水平线型展布,每一层内的信号强度基本一致,反映在图像上无明显变化。
⼤穿透深度地质雷达、探地雷达100m⼤穿透深度地质雷达COBRA Plug-in ⼀、前⾔常⽤的地质雷达探测深度⼀般在10-15⽶以内,要增加探测深度必须采⽤低频天线,然⽽它⼜使屏蔽发⽣困难,限制了低频天线的应⽤领域。
为此,瑞典RADARTEM公司研发和⽣产了⼤穿透深度Cobra plug-In地质雷达,该系统采⽤先进的实时采样技术,使信噪⽐提⾼45dB,勘探深度增加⼀倍以上,采⽤具有强烈抗⼲扰能⼒的、半屏蔽技术的收发⼀体天线,进⼀步保障了最⼤勘探深度,勘探深度0-100m,在北京和厦门地区的应⽤结果表明,在很强⼲扰地区仍可获得⼗分可靠的探测结果。
此外该公司研发的双通道、双天线CobraWifi地质雷达具有极⾼的分辨率和极强的抗⼲扰能⼒,探测深度0-10m。
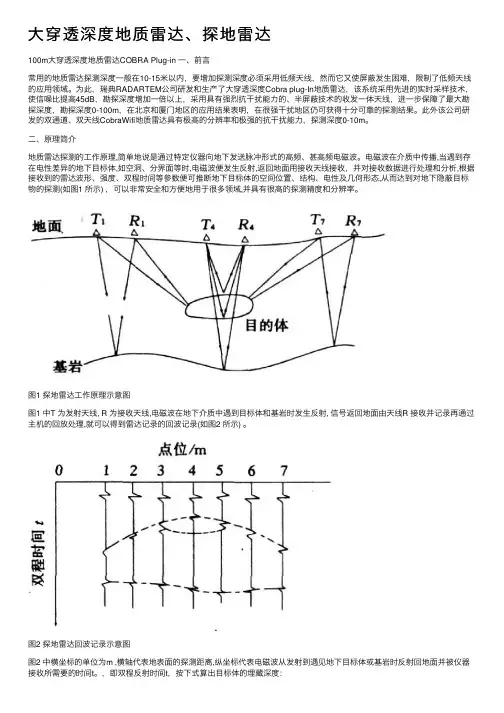
⼆、原理简介地质雷达探测的⼯作原理,简单地说是通过特定仪器向地下发送脉冲形式的⾼频、甚⾼频电磁波。
电磁波在介质中传播,当遇到存在电性差异的地下⽬标体,如空洞、分界⾯等时,电磁波便发⽣反射,返回地⾯⽤接收天线接收,并对接收数据进⾏处理和分析,根据接收到的雷达波形、强度、双程时间等参数便可推断地下⽬标体的空间位置、结构、电性及⼏何形态,从⽽达到对地下隐蔽⽬标物的探测(如图1 所⽰) ,可以⾮常安全和⽅便地⽤于很多领域,并具有很⾼的探测精度和分辨率。
图1 探地雷达⼯作原理⽰意图图1 中T 为发射天线, R 为接收天线,电磁波在地下介质中遇到⽬标体和基岩时发⽣反射, 信号返回地⾯由天线R 接收并记录再通过主机的回放处理,就可以得到雷达记录的回波记录(如图2 所⽰) 。
图2 探地雷达回波记录⽰意图图2 中横坐标的单位为m ,横轴代表地表⾯的探测距离,纵坐标代表电磁波从发射到遇见地下⽬标体或基岩时反射回地⾯并被仪器接收所需要的时间t。
,即双程反射时间t,按下式算出⽬标体的埋藏深度:其中, t 为⽬标层雷达波的双程反射时间; c 为雷达波在真空中的传播速度(0. 3 m/ ns) ; εr 为⽬标层以上介质的相对介电常数均值。


探地雷达培训课件一、引言探地雷达(GroundPenetratingRadar,简称GPR)是一种非破坏性探测技术,利用高频电磁波在地下的传播特性,对地下介质进行探测和成像。
它广泛应用于工程地质、考古、环境监测、资源勘探等领域。
本课件旨在介绍探地雷达的基本原理、系统组成、数据采集与处理方法,以及其在实际应用中的案例分析。
二、探地雷达的基本原理探地雷达利用电磁波在不同介质中传播速度的差异,以及地下目标体与周围介质电性参数的差异,实现对地下结构的探测。
电磁波在传播过程中,遇到不同电性参数的界面时,会发生反射和折射,通过接收这些反射波和折射波,可以获取地下目标体的信息。
三、探地雷达系统组成探地雷达系统主要由天线、发射接收单元、数据采集与处理单元等组成。
天线是探地雷达的关键部件,用于发射和接收电磁波。
发射接收单元负责产生高频电磁波,并将接收到的信号转换为数字信号。
数据采集与处理单元负责对采集到的数据进行实时处理,提取地下目标体的信息。
四、探地雷达数据采集与处理方法1.数据采集:在进行探地雷达数据采集时,需选择合适的探测参数,如天线频率、步长、扫描速度等。
同时,为提高探测效果,还需进行天线校准、背景噪声测试等操作。
2.数据处理:探地雷达数据处理主要包括预处理、滤波、反演等步骤。
预处理包括去除背景噪声、校正天线增益等;滤波用于压制干扰波,提高信号的信噪比;反演则是将雷达数据转换为地下目标体的图像。
五、探地雷达在实际应用中的案例分析1.工程地质领域:探地雷达可用于探测地下管线、空洞、岩溶等地质目标,为工程建设提供依据。
2.考古领域:探地雷达可用于探测地下遗址、墓葬、建筑遗迹等,为考古发掘提供线索。
3.环境监测领域:探地雷达可用于监测地下水位、污染范围等,为环境保护提供数据支持。
4.资源勘探领域:探地雷达可用于探测矿产资源、地下水等,为资源开发提供依据。
六、总结探地雷达作为一种高效、无损的地下探测技术,具有广泛的应用前景。
一、地下空洞、地下管线,路面裂缝探查方法:利用探地雷达检测仪器:SIR雷达检测原理:如图1所示探地雷达由发射电路、发射天线、控制面板、接收天线、接受电路、笔记本电脑及光缆等组成。
探地雷达的两块板式天线紧贴目的体表面,发射天线发射的电磁波遇反射层后产生反射回波信号。
由接收天线接收并直接将该信号数字化。
然后由笔记本电脑收集并记录,每一测点视时窗大小仅需几秒或十几秒即可完成采集任务,可以方便地实现连续采集和连续记录,易于图像解释。
探地雷达图像解释的基础是研究电磁波的传播特性,因此主要是通过找寻反射界面来判断得出目的体的几何形状和物理特征介质的电性质差异和物性差异成为衡量探地雷达适用与否的主要标准,介质间的物性差异越大,二者间的界面越易于分辨。
图1仪器技术参数如下:检测过程:根据实际情况采用0.5m至1m不等的观测点距,采用不同的天线中心频率探测道路不同深度的空洞情况。
二、已建建筑沉降监测在本测区内,应设5个以上基准点,相互之间距离不超过60m,以便相互校准,基准点要设置在距建筑物一定距离以外的稳定地方,且有良好的通视条件。
沉降采用闭合线路二等水准测量方法进行,工作基点用作直接测定观测点的起始点或终点,利用DS1水准仪进行沉降点的沉降观测。
观测点的布设:为了能够反映出建筑物的准确沉降情况,应以建筑物的大小、荷重及基础构造等因素来确定观测点的位置,沉降观测点纵、横向对称,且均匀地分布在建筑物的周围及内部。
一般建筑物承重柱、转角处、沉降缝的两侧、纵横墙交接处或每隔10~20m的承重墙上设置观测点。
三、已建建筑倾斜监测方法:经纬仪法仪器:经纬仪原理:在需观测墙面上设上,下两个测点 A 、B ,其高差为H 。
在该墙面垂线方向设立一个稳定的点作为测站。
并选择一个稳定的后视点开始量测时测出A 、B 两点对后视点的夹角OB OA αα, (该值为初始值)及测站至A 、B 两点之间的距离B A d d ,。
图 2为 A 点计算简图。
第三章第五节探地雷达技术ppt 课件•探地雷达技术概述•探地雷达系统组成•探地雷达数据处理与解释•探地雷达在不同领域中的应用实例目•探地雷达技术发展趋势与挑战•总结回顾与拓展思考录探地雷达技术概述01CATALOGUE定义与发展历程定义探地雷达(Ground Penetrating Radar,GPR)是一种利用高频电磁波在地下介质中传播并反射回来的特性,对地下目标体进行探测和成像的无损检测技术。
发展历程自20世纪70年代初期,探地雷达开始被应用于地质勘探、考古、环境工程等领域。
随着计算机技术和信号处理技术的不断发展,探地雷达的分辨率和探测深度不断提高,应用领域也不断扩展。
原理及工作方式原理探地雷达通过发射高频电磁波,当电磁波遇到不同电性的地下介质界面时,会发生反射和折射。
接收天线接收反射回来的电磁波信号,并通过信号处理技术对信号进行处理和成像,从而得到地下目标体的位置和形态信息。
工作方式探地雷达可以采用不同的工作频率、天线类型和扫描方式等参数设置,以适应不同的探测需求和地下环境。
常见的工作方式包括剖面扫描、三维成像、实时监测等。
应用领域与意义应用领域探地雷达广泛应用于地质勘探、考古、环境工程、建筑工程、军事等领域。
例如,在地质勘探中,可以用于探测矿藏、油气藏等;在考古中,可以用于探测古墓、遗址等;在环境工程中,可以用于探测污染物分布、土壤层结构等。
意义探地雷达作为一种无损检测技术,具有非破坏性、高分辨率、高效率等优点。
它可以提供丰富的地下信息,为相关领域的研究和决策提供有力支持。
同时,随着技术的不断发展,探地雷达的应用前景将更加广阔。
探地雷达系统组成02CATALOGUE发射机与接收机设计发射机产生高频电磁波,通常采用脉冲体制或连续波体制。
脉冲体制具有高峰值功率、宽频带等特点,适用于浅层高分辨率探测;连续波体制则具有低功耗、易于实现等优点,适用于深层探测。
接收机接收来自地下的反射信号,并进行放大、滤波等处理。
一、地下空洞、地下管线,路面裂缝探查方法:利用探地雷达检测仪器:SIR雷达检测原理:如图1所示探地雷达由发射电路、发射天线、控制面板、接收天线、接受电路、笔记本电脑及光缆等组成。
探地雷达的两块板式天线紧贴目的体表面,发射天线发射的电磁波遇反射层后产生反射回波信号。
由接收天线接收并直接将该信号数字化。
然后由笔记本电脑收集并记录,每一测点视时窗大小仅需几秒或十几秒即可完成采集任务,可以方便地实现连续采集和连续记录,易于图像解释。
探地雷达图像解释的基础是研究电磁波的传播特性,因此主要是通过找寻反射界面来判断得出目的体的几何形状和物理特征介质的电性质差异和物性差异成为衡量探地雷达适用与否的主要标准,介质间的物性差异越大,二者间的界面越易于分辨。
图1仪器技术参数如下:检测过程:根据实际情况采用0.5m至1m不等的观测点距,采用不同的天线中心频率探测道路不同深度的空洞情况。
二、已建建筑沉降监测在本测区内,应设5个以上基准点,相互之间距离不超过60m,以便相互校准,基准点要设置在距建筑物一定距离以外的稳定地方,且有良好的通视条件。
沉降采用闭合线路二等水准测量方法进行,工作基点用作直接测定观测点的起始点或终点,利用DS1水准仪进行沉降点的沉降观测。
观测点的布设:为了能够反映出建筑物的准确沉降情况,应以建筑物的大小、荷重及基础构造等因素来确定观测点的位置,沉降观测点纵、横向对称,且均匀地分布在建筑物的周 围及内部。
一般建筑物承重柱、转角处、沉降缝的两侧、纵横墙交 接处或每隔 10~20m 的承重墙上设置观测点。
三、已建建筑倾斜监测方法:经纬仪法仪器:经纬仪原理:在需观测墙面上设上,下两个测点 A 、B ,其高差为H 。
在该墙面垂线方向设立一个稳定的点作为测站。
并选择一个稳定的后视点开始量测时测出A 、B 两点对后视点的夹角OB OA αα, (该值为初始值)及测站至A 、B 两点之间的距离B A d d ,。
图 2为 A 点计算简图。