(完整版)行星齿轮减速器
- 格式:ppt
- 大小:4.88 MB
- 文档页数:41
行星齿轮减速器的相关计算行星齿轮减速器是一种常用的机械传动装置,其特点是结构紧凑、承载能力大、传动效率高。
在工程设计和机械计算中,对行星齿轮减速器的相关参数进行计算是必不可少的工作。
本文将详细介绍行星齿轮减速器的相关计算方法。
一、行星齿轮减速器的基本构造二、行星齿轮减速器的传动比计算传动比是指输入轴和输出轴的转速比,可以通过以下公式计算:i=(N_s+N_r)/N_s其中,i为传动比,N_s为太阳齿轮的齿数,N_r为行星齿轮的齿数。
行星齿轮减速器的传动比可以通过调整太阳齿轮和行星齿轮的齿数来实现。
三、行星齿轮减速器的传动效率计算η=(1-δ/100)*(1-ε/100)其中,η为传动效率,δ为齿间损失系数,ε为噪声损失系数。
行星齿轮减速器的传动效率受到齿轮的磨损和摩擦影响,一般情况下,传动效率在95%以上。
四、行星齿轮减速器的扭矩计算输入轴扭矩计算可以通过以下公式计算:T_in = P / (n * η)其中,T_in为输入轴扭矩,P为输出功率,n为输入轴转速,η为传动效率。
输出轴扭矩计算可以通过以下公式计算:T_out = i * T_in其中,T_out为输出轴扭矩,i为传动比,T_in为输入轴扭矩。
五、行星齿轮减速器的选择在实际工程中,选择合适的行星齿轮减速器需要考虑以下因素:1.承载能力:根据实际应用需求,选择承载能力适当的行星齿轮减速器。
2.传动比:根据需要的输出转速和输入转速,选择合适的行星齿轮减速器。
3.外形尺寸:根据实际安装空间,选择符合尺寸要求的行星齿轮减速器。
4.传动效率:选择传动效率高的行星齿轮减速器,以提高传动效率和节能效果。
5.稳定性:选择结构稳定、运行平稳的行星齿轮减速器,以减少振动和噪声。
六、行星齿轮减速器的基本计算流程1.确定输入功率、输入转速和输出转速。
2.根据输入功率和输入转速计算输入轴扭矩。
3.根据输入轴扭矩和传动比计算输出轴扭矩。
4.根据输出轴扭矩和输出转速计算输出功率。
行星齿轮减速器原理行星齿轮减速器是一种常用于机械传动系统中的重要装置。
它的主要作用是将高速输入转速降低到所需的低速输出转速,并且能够提供足够的扭矩输出。
行星齿轮减速器原理基于行星齿轮的转动和卫星齿轮的轴向移动,通过不同的齿轮组合实现不同的减速比。
行星齿轮减速器由一个太阳轮、多个行星轮和一个环形齿轮组成。
太阳轮位于行星齿轮的中心,行星轮则围绕太阳轮旋转并与环形齿轮相啮合。
在传动过程中,太阳轮会通过电机等输入轴传递动力,驱动行星轮绕太阳轮旋转。
而环形齿轮则通过内啮合与行星轮相连,实现输出轴的运动。
行星齿轮减速器的减速比由行星轮的数量和啮合关系决定。
就常见的行星齿轮减速器而言,通常有三种啮合关系:内啮合、外啮合和内外啮合。
其中,内啮合行星齿轮减速器的行星轮位于环形齿轮的内部,外啮合则是行星轮位于环形齿轮的外部。
而内外啮合则是行星轮既位于环形齿轮的内部,又位于环形齿轮的外部。
行星齿轮减速器的工作原理可以直观地解释为:当太阳轮逆时针旋转时,行星轮也会绕太阳轮逆时针旋转,但行星轮和环形齿轮的方向则相反,即环形齿轮顺时针旋转。
由于环形齿轮固定在输出轴上,所以当环形齿轮旋转时,输出轴也会跟随旋转,从而实现减速的效果。
在行星齿轮减速器中,减速比计算公式为:减速比= (1 + z)/ z * (1 + Z)其中,z为行星轮的齿数,Z为环形齿轮的齿数。
通过调整行星轮和环形齿轮的齿数,可以得到不同的减速比。
同时,行星齿轮减速器的输出转矩则是由输入转矩乘以减速比来决定的。
总之,行星齿轮减速器通过行星轮的旋转和环形齿轮的转动,实现高速输入转速降低到低速输出转速的效果。
其工作原理基于啮合关系和齿轮的组合方式,经过合理设计可以实现不同的减速比,并且具有较高的传动效率和扭矩输出能力。
它在机械传动系统中应用广泛,例如用于工业生产设备、机床、汽车传动等领域。
行星齿轮减速器标准
一、引言
行星齿轮减速器是一种利用行星齿轮传动原理的减速装置,具有结构紧凑、体积小、重量轻、承载能力大、传动效率高、工作平稳、噪声低等优点,广泛应用于各种机械设备中。
为了保证其质量和性能,需要有一套完整的行星齿轮减速器标准来进行规范和指导。
二、行星齿轮减速器的主要技术参数
1. 速比:行星齿轮减速器的速比是衡量其减速效果的重要指标,通常要求在一定范围内可调。
2. 扭矩:行星齿轮减速器的扭矩反映了其传递动力的能力,应能满足设备运行的要求。
3. 效率:行星齿轮减速器的工作效率直接影响到整个设备的能耗,因此对其有较高的要求。
三、行星齿轮减速器的设计与制造标准
1. 设计标准:行星齿轮减速器的设计应符合相关机械设计规范,确保其结构合理、安全可靠。
2. 制造标准:行星齿轮减速器的制造应符合相关机械制造标准,确保其质量优良、精度高。
四、行星齿轮减速器的测试与验收标准
1. 测试标准:行星齿轮减速器的测试应按照相关机械测试标准进行,包括性能测试、寿命测试、可靠性测试等。
2. 验收标准:行星齿轮减速器的验收应根据测试结果和用户需求进行,只有满足所有标准的产品才能出厂。
五、结论
行星齿轮减速器标准是保证其质量和性能的重要依据,也是提高其市场竞争力的关键因素。
因此,无论是制造商还是用户,都应该重视并遵守这些标准,以实现共赢。
行星齿轮减速器结构和原理
导语:行星齿轮减速器属于精密减速电机,具有很高的工作效率和适用性;行星齿轮减速器按照功率分为小型行星齿轮减速器、大功率行星减速器
行星齿轮减速器属于精密减速电机,具有很高的工作效率和适用性;行星齿轮减速器按照功率分为小型行星齿轮减速器、大功率行星减速器,分别应用于不同的领域场景中;下面详细介绍行星齿轮减速器的结构组成和工作原理。
一、行星齿轮减速器结构组成
行星齿轮减速器结构主要又行星轮、太阳轮、内齿圈、行星架、驱动源(马达、电机)组合而成。
二、行星齿轮减速器工作原理
1.级数:行星齿轮的套数。
由于一套行星齿轮无法满足较大的传动比,有时需要2套或者3套来满足用户较大的传动比的要求.由于
增加了行星齿轮的数量,所以2级或3级减速机的长度会有所增加,效率会有所下降。
2.回程间隙:将输出端固定,输入端顺时针和逆时针方向旋转,使输入端产生额定扭矩+-2%扭矩时,减速机输入端有一个微小的角位移,此角位移就是回程间隙.
3.行星齿轮减速器由一个内齿环(A)紧密结合于齿箱壳体上,环齿中心有一个自外部动力所驱动之太阳齿轮(B)介于两者之间有一组由三颗齿轮等分组合于托盘上之行星齿轮组(C)该组行星齿轮依靠着出力轴、内齿环及太阳齿支撑浮游于期间;当入力侧动力驱动太阳齿时,可带动行星齿轮自转,并依循着内齿环之轨迹沿着中心公转,行星之旋转带动连结于托盘之出力轴输出动力。

行星齿轮减速器工作原理
行星齿轮减速器是一种常用的传动装置,具有紧凑结构和高传动比的特点。
它主要由太阳轮、行星轮、内齿轮、行星架和外齿轮等组成。
其工作原理如下:
1. 太阳轮传动:驱动力通过输入轴作用在太阳轮上。
太阳轮的齿轮与内齿轮咬合,使太阳轮产生旋转运动。
2. 行星轮传动:内齿轮与行星轮上的行星齿轮咬合。
行星架上的行星轮通过自身的轴向移动使行星轮绕太阳轮旋转,同时行星轮也绕着内齿轮旋转。
3. 外齿轮输出:行星轮的输出轴通过行星架与外齿轮咬合,使外齿轮产生旋转运动。
输出轴上的负载通过外齿轮传递出去,实现减速效果。
通过太阳轮、行星轮和外齿轮之间的多级传动,行星齿轮减速器可以实现较高的传动比。
同时,由于行星轮固定在行星架上,所以可以实现反向传动。
减速器的输入轴和输出轴可以灵活布置,使其适用于多种传动方式。
总结起来,行星齿轮减速器的工作原理是通过多级传动,将输入轴的驱动力传递给输出轴,实现减速效果。
这种减速器结构紧凑、效率高,广泛应用于机械设备中。
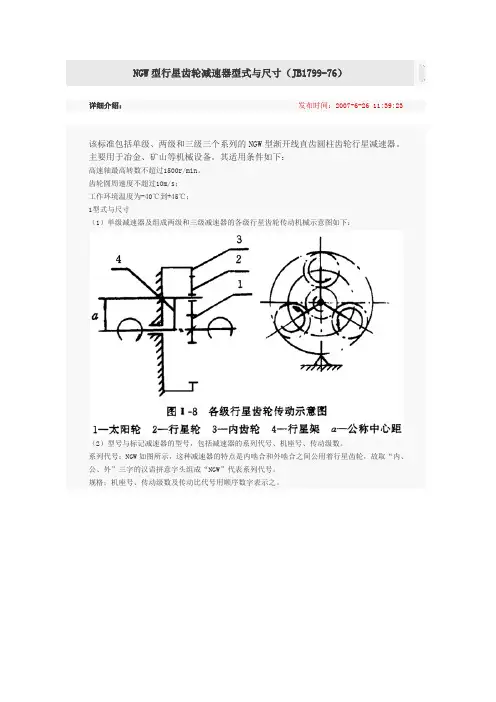
NGW型行星齿轮减速器型式与尺寸(JB1799-76)详细介绍:发布时间:2007-6-26 11:39:23该标准包括单级、两级和三级三个系列的NGW型渐开线直齿圆柱齿轮行星减速器。
主要用于冶金、矿山等机械设备。
其适用条件如下:高速轴最高转数不超过1500r/min。
齿轮圆周速度不超过10m/s;工作环境温度为-40℃到+45℃;1型式与尺寸(1)单级减速器及组成两级和三级减速器的各级行星齿轮传动机械示意图如下:(2)型号与标记减速器的型号,包括减速器的系列代号、机座号、传动级数。
系列代号:NGW如图所示,这种减速器的特点是内啮合和外啮合之间公用着行星齿轮,故取“内、公、外”三字的汉语拼意字头组成“NGW”代表系列代号。
规格;机座号、传动级数及传动比代号用顺序数字表示之。
(3)型式与尺寸见表Ⅱ-44、表Ⅱ-45、表Ⅱ-46。
表Ⅱ-44单级减速器型式、尺寸表1机座号型号规格公称传动比i0外形及中心高轴伸地脚尺寸质量kg L B H H0R d Dl1l2t1b1t2b2L1L2L3LB1d1h1 NGW112.8-4.553282951250-0.5125355558538.515516215165251522M1620535-12.54773533857502 NGW212.8-4.564 353251400-0.5144671543.512 65.5182451853115.5235M225805-12.5535355538.516.5733 NGW312.8-4.5632 353651600-0.516457715491476202623125 27M225105-12.55694743.51262984 NGW412.8-4.573438425.51800-0.5185885 15551687242923315632M2430147 5-12.5634457514721285 NGW512.8-4.5845 42463.52000-0.5255985115616972431253196.536M24352135-12.572958555168.51936 NGW612.8-4.5886 4755242250-0.52256115 12565.518182836293522.545M3402895-12.5731558561667.52647 NGW72.8-4.59335355742500-0.525651115147.518119323753535213465M34035915-12.5 861565.51883018 NGW812.8-4.5142596342800-0.5287512115 1681212932443545219 51M36454495-12.589965157.518863999 NGW912.8-4.51141667213150-0.53158513125 1659224143647538545225.557M36456045-12.5976751158127.55421 0 NGW112.8-4.5126174583550-0.53559515140 21328161405254255251 645M4250815-12.5173851259224787321 1 NGW1112.8-4.51355848914000-0.5415 17160 2113281814058485263 74M425510605-12.511459514132873991 2 NGW1212.8-4.515951134500-0.545511519162412432 22456856628882M486016385-12.51281516113287314756表Ⅱ-45两级减速器型式、尺寸机座号型号规格公称传动比i0外形及中心高轴伸地脚尺寸质量/kg L B H H0R d Dl1l2t1b1t2b2L1L2L3LB1d1h4 NGW4214-22.568738425.51800-0.51835855 1528.518724292337232M243012825-160687355338 1305 NGW5214-22.5767 42463.52000-0.5249711543.5129724312538.536M243524425-160752355538.512416 NGW6214-22.585.54755242250-0.522545171254914182836293567.545M340291 25-18474127960 05.5 0 0 3.527 NGW7214-22.5895355742500-0.52550 1185 145516 1193237535358465M34035025-16087545749143508 NGW8214-22.5976.5596342800-0.52855128516616129324435458651M364548825-160976.558555164609 NGW9214-22.514667213150-0.531561315 16565.5181436475385457.557M364560725-16012558561657710 NGW1214-22.5114474583550-0.5355651515 27.51816140525425578645M425089525-160114461565.51889511 NGW11214-22.51222848914000-0.547517115 281218140584857374M425511225-160121265157.518107512 NGW12214-22.51385951134500-0.54558519125 2492242245685667382M4860173325-1601375751158121539表Ⅱ-46三级减速器型式、尺寸外形及中心高轴伸地脚尺寸质量/kgL B H H0R d D l1l2t1b1t2b2L1L2L3</,DIV>L0B197 3. 5 5355742500-0.5253011551433 81193237530535 8046510 71 596342800-0.5283512551638.51012932443545 865111 37 .5 667213150-0.531540137016543.51214364753854570.557127480353545 1570 2049 14 1640 524250 78 64W1 03 63 5 0 50-0.55 0 0 1 5 5 5 2 211 NGW1131359.5848914000-0.5405017852055 1618140584850 7374M4255116312 NGW12315049510134500-0.54555519852460 1620245685660 7382M48601756NGW型行星齿轮减速器基本参数(一)(JB1799-76)详细介绍:发布时间:2007-6-26 11:53:022.基本参数(1)公称中心距a及公称传动比i0。
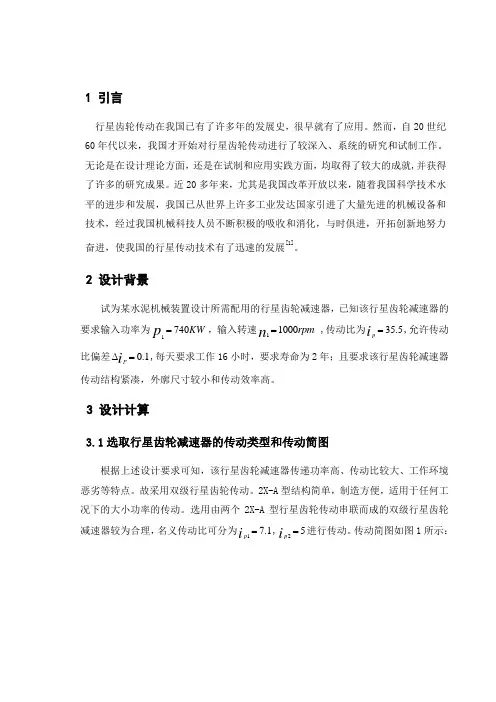
1 引言行星齿轮传动在我国已有了许多年的发展史,很早就有了应用。
然而,自20世纪60年代以来,我国才开始对行星齿轮传动进行了较深入、系统的研究和试制工作。
无论是在设计理论方面,还是在试制和应用实践方面,均取得了较大的成就,并获得了许多的研究成果。
近20多年来,尤其是我国改革开放以来,随着我国科学技术水平的进步和发展,我国已从世界上许多工业发达国家引进了大量先进的机械设备和技术,经过我国机械科技人员不断积极的吸收和消化,与时俱进,开拓创新地努力奋进,使我国的行星传动技术有了迅速的发展[1]。
2 设计背景试为某水泥机械装置设计所需配用的行星齿轮减速器,已知该行星齿轮减速器的要求输入功率为1740KW p=,输入转速11000rpm n = ,传动比为35.5p i =,允许传动比偏差0.1P i ∆=,每天要求工作16小时,要求寿命为2年;且要求该行星齿轮减速器传动结构紧凑,外廓尺寸较小和传动效率高。
3 设计计算3.1选取行星齿轮减速器的传动类型和传动简图根据上述设计要求可知,该行星齿轮减速器传递功率高、传动比较大、工作环境恶劣等特点。
故采用双级行星齿轮传动。
2X-A 型结构简单,制造方便,适用于任何工况下的大小功率的传动。
选用由两个2X-A 型行星齿轮传动串联而成的双级行星齿轮减速器较为合理,名义传动比可分为17.1p i =,25p i =进行传动。
传动简图如图1所示:图13.2 配齿计算根据2X-A 型行星齿轮传动比pi的值和按其配齿计算公式,可得第一级传动的内齿轮1b ,行星齿轮1c 的齿数。
现考虑到该行星齿轮传动的外廓尺寸,故选取第一级中心齿轮1a 数为17和行星齿轮数为3p n =。
根据内齿轮()1111b a p iz z=-()17.1117103.7103b z =-=≈对内齿轮齿数进行圆整后,此时实际的P 值与给定的P 值稍有变化,但是必须控制在其传动比误差范围内。
实际传动比为i =1+11za zb =7.0588 其传动比误差i ∆=ip i ip -=7.17.05887.1-=5℅根据同心条件可求得行星齿轮c1的齿数为()111243c b a zz z =-=所求得的1ZC 适用于非变位或高度变位的行星齿轮传动。
行星齿轮减速器原理行星齿轮减速器是一种常见的传动装置,它由太阳轮、行星轮、行星架和内齿圈组成。
在工业生产中,行星齿轮减速器被广泛应用于各种机械传动系统中,其原理简单而高效。
本文将介绍行星齿轮减速器的原理及其工作过程。
首先,让我们来了解一下行星齿轮减速器的结构。
行星齿轮减速器由一个或多个行星轮与一个太阳轮和一个内齿圈组成。
太阳轮位于中心,而行星轮则围绕太阳轮旋转,同时也围绕内齿圈旋转。
当太阳轮转动时,行星轮会绕着太阳轮旋转,并且自身也会旋转,从而实现传动效果。
行星齿轮减速器的原理是利用行星轮的运动来实现传动比的改变。
当太阳轮作为输入轴驱动时,行星轮将绕着太阳轮旋转,同时也绕着内齿圈旋转。
由于内齿圈是固定不动的,所以行星轮的旋转会导致内齿圈的转动,从而实现减速效果。
而当太阳轮停止转动时,行星轮也会停止旋转,从而实现传动系统的断开。
行星齿轮减速器的工作原理可以通过简单的模型来理解。
想象一下,太阳轮是一个固定的中心轴,行星轮则是围绕太阳轮旋转的轮子,内齿圈则是一个固定的外圈。
当太阳轮旋转时,行星轮的运动会带动内齿圈一起旋转,从而实现传动效果。
而当太阳轮停止旋转时,行星轮也会停止旋转,从而实现传动系统的断开。
行星齿轮减速器的原理简单而高效,其优点在于传动比可调,结构紧凑,承载能力强。
因此,行星齿轮减速器被广泛应用于各种机械传动系统中,如工厂生产线、汽车变速箱等领域。
总的来说,行星齿轮减速器的原理是利用行星轮的运动来实现传动比的改变,其工作过程简单而高效。
通过本文的介绍,相信读者对行星齿轮减速器的原理有了更深入的理解,希望本文可以帮助读者更好地理解和应用行星齿轮减速器。