雷达的径向速度检验方法研究
- 格式:pdf
- 大小:246.00 KB
- 文档页数:4

调频步进信号高速运动目标径向速度精确测量技术研究袁昊天,文树梁,程 臻(航天科工集团二院二十三所研发中心,北京100854) 摘 要: 针对调频步进信号高速运动目标径向速度影响合成距离像问题,提出一种复合测速方法.首先利用窄带跟踪距离的微分值对回波进行速度补偿和包络移动,其次对正正步进频率信号进行相关处理并构造跟踪回路以实现速度粗略估计和跟踪,然后再利用跟踪速度微分值补偿加速度,最后对正负步进频率信号进行相关处理,实现速度的精确测量.仿真结果证明了该方法的可行性.关键词: 调频步进信号;速度测量;高速运动目标;正负相关中图分类号: TN958 文献标识码: A 文章编号: 0372-2112(2009)03-0649-05Accurate Velocity Measurement of High Speed Moving Targetabout Stepped -frequency Chirp SignalYUAN Hao -tian ,WE N Shu -liang ,CHE NG Zhen(R &D C ente r ,Bei jing Institute of Radi o M eas urement ,Beijing 100854,C hina )Abstract : To solve the effect of the velocity on the range profile ,a compound velocity measu rement metho d for the stepped -frequency Chirp sig nal is presented .With the derivation of narro wband tracking ranges ,velocity compensation and envelope mig ra -tion are finished .Then with the correlation processing of the positive -positive stepped -frequency signals ,and followed with the track -ing loop ,the velocity i s coarse estimated and tracked .After that the acceleration is compensated with the tracking velocity deriva -tion .At last with the correlation processing of positive -negative stepped frequency sig nals ,the precise velocity is obtained .Simulationresults prove the feasibility of the proposed method .Key words : stepped -frequency Chirp signal ;velocity measu rement ;high speed moving target ;positive negative correlation1 引言 调频步进信号是一种新型宽带信号,兼有线性调频信号和步进频率信号的特点.在相同的合成带宽下,调频步进信号具有低瞬时带宽,高数据率和较远作用距离等优点[1].同时,调频步进信号还能避免线性调频信号相控阵雷达宽扫描角孔径渡越时间限制.因而调频步进信号在高速远距离空间目标探测和识别中有着极大的应用价值.然而目标的径向运动会导致脉间包络走动,子脉冲脉压耦合时移以及合成距离像偏移和波形失真,因此必须对目标运动速度进行精确的估计.目前,国内外已有不少针对步进频率信号的速度估计方法[2~5].文献[2~4]是在速度范围的先验信息下对速度进行迭代搜索,运算量较大;而文献[5]是采用宽窄带信号复合测速,在雷达宽带成像时还需重新发射脉冲多普勒(PD )信号进行速度的精确测量,增加了系统的复杂度,占用雷达系统大量的时间资源.另外,对于高速运动的空间目标,在雷达径向方向上通常会产生加速度分量,在成像时往往必须考虑目标的加速度.因此,如何在不增加系统复杂度的同时完成空间目标的速度精确测量和成像任务,成为调频步进雷达工程实践亟待解决的问题.基于此本文首先介绍了调频步进雷达高速运动目标的回波特性,在此基础上分析了调频步进信号的距离多普勒性能,之后给出了一种径向速度精确测量方法,最后进行了仿真验证.2 调频步进信号高速运动目标回波特性 根据文献[1],调频步进信号的视频回波为:x (t )=∑N -1i =0A i rectt -iT r -τi (t )T p·exp {j πK [t -iT r -τi (t )]2}·exp [-j2πi Δf τi (t )]·exp [-j2πf 0τi (t )](1)上式中A i 为第i 个脉冲回波的幅度,K 为调频步进信号Chirp 子脉冲的调频斜率,T p 为Chir p 子脉冲脉冲宽度,T r 为脉冲重复周期(PR T ),Δf 为第i 个脉冲频率增量,f 0为发射载频中不变的基频分量,N 为子脉冲个收稿日期:2008-01-10;修回日期:2008-12-12第3期2009年3月电 子 学 报ACTA ELECTR ONICA SINICA Vol .37 No .3Mar . 2009数,τi (t )为雷达第i 个脉冲回波时延,i =0,1,2,…,N -1.当目标高速运动时通常加速度分量比较大,有τi (t )=2(R -Vt -0.5at 2)/C .其中R 为调频步进信号发射时目标距雷达的初始径向距离,V 为目标运动初速度,a 为目标运动加速度.将回波时延代入(1)式并化简得x (t )=∑N -1i =0A i x i (t )·exp [-j2πi Δf (2R C -2V C t -a C t 2)]·exp [-j2πf 0(2R C -2V C t -aCt 2)](2)式中x i (t )为第i 个脉冲重复周期(PRT )的线性调频子脉冲视频回波,且x i (t )=rect [t -iT r -2R C +2V C t +aCt 2T p]exp {j πK [t -iT r -2R C +2V C t +aCt 2]2}(3)可见,不同于常规运动目标,高速运动目标调频步进信号的视频回波除受速度V 影响外,还受加速度a (径向速度的变化率)的影响,但仍可分解为各个PRT 的线性调频(Chirp )子脉冲和不同PR T 之间的频率步进(SF )两部分处理.其中Chirp 子脉冲主要受速度V 的影响,加速度影响可以忽略.当目标高速运动时,对Chirp 子脉冲的影响主要是脉压后输出的峰值在不同PRT 之间会产生移动.且不发生距离移动时要求满足条件[6]:2V sub C NT r <14KT r 即V sub <C8N KT 2r(4)如果速度补偿误差满足式(4),则可以进行后续的I DFT 处理.由公式(2)可知,对于SF 信号,除受速度影响外,还受加速度的影响.对调频步进信号的速度、加速度补偿精度满足[5]:一次相位项补偿误差:ΔV 1<C /4N f 0T r (5)二次相位项补偿误差:ΔV 2<C /8N 2ΔfT r (6)加速度补偿误差:Δa ≤C /4N 2f 0T 2r(7)为直观描述,设调频步进信号参数如下:雷达载频为X 波段,步进阶梯数N =128,频率步进量Δf =10MHz ,脉冲重复周期T r =80μs ,子脉冲时宽T p =5μs ,子脉冲调频斜率K =3.2×1012Hz /s .若无特殊说明,以下仿真均用上述参数.代入上述参数,可得子脉冲补偿误差V sub <228.88m /s ,一次项补偿误差ΔV 1<0.81m /s ,二次项补偿误差ΔV 2<2.86m /s ,加速度补偿误差Δa ≤79.47m /s .可见对于高速运动目标,必须考虑加速度a 的影响.若同时对速度V 和加速度a 进行估计,则是一个二维搜索问题,难于工程应用.由于目标运动加加速度不会特别大,所以工程上可以考虑构造速度跟踪回路.在目标速度稳定跟踪后,利用速度微分值先对SF 信号进行加速度补偿,然后再进行速度的精确测量,加速度补偿精度要求满足式(7)要求.3 速度测量原理 由于调频步进信号子脉冲脉压后相当于发射包络为sinc 函数的频率步进信号,所以可以考虑借用频率步进信号的速度测量方法来对调频步进信号进行速度测量.文献[5]提出了一种复合测速的思想,即先用宽带信号进行时域相关法测速,为和下文对比,本文称之为正正相关法测速.它是对两个脉冲组回波信号先求相位差,然后再做I FFT 处理.其速度分辨率ΔV =C2N Δf ΔT,无模糊测速范围为V ∈-C 4Δf ΔT ,C 4Δf ΔT,ΔT 为两帧调频步进信号的时间差,代入参数可得速度分辨率ΔV =5.72m /s ,测速范围(-366.21m /s ,366.21m /s ),显然速度分辨率不能满足公式(5)一次项补偿误差要求.所以文中在发射宽带信号之后又发射PD 信号进行窄带测速,以提高速度分辨率.这种方法虽然满足测速精度的要求,但无疑会增加雷达系统的复杂度,同时发射P D 信号也会占用大量雷达时间资源,造成时间浪费.实际上,步进频率信号有两种不同的步进方向,基于此刘铮提出了一种正负步进频率信号并给出了其速度测量方法,同时还论证了其较强的杂波抑制能力[5].但其速度测量是利用正负通道合成脉冲目标峰值位置差异来完成的,抗噪性能差.类似正负步进频率信号可以发射正负调频步进信号,波形如图1所示.实际上,对于正负步进频率信号同样可以采用时域相关法测速,本文称之为正负相关法测速.以下对正负相关法测速原理进行详细的分析.假设目标和雷达的径向距离为R ,正调频步进信号速度和加速度初补偿并脉压后第i 个视频脉冲回波设为S 1(i ),负调频步进信号对应同一载频速度和加速度初补偿并脉压后视频脉冲回波设为S 2(i ),目标散射点的合成(质心)具有相同的运动特性,在两组脉冲重复周期内假设目标的加加速度影响可以忽略.则S 1(i )=A 1,i KT 2p ·exp (j Υ1i )=A 1,i KT 2p·exp [-j2πi Δf (2R C -2ΔV C t i -ΔaC t 2i )]·exp [-j2πf 0(2R C -2ΔV C t i -ΔaC t 2i)](8)S 2(i )=A 2,iKT 2p ·exp (j Υ2i )=A 2,i KT 2p·exp [-j2πi Δf (2R C -2ΔV C t 2N -1-i -Δa C t 22N -1-i)]650 电 子 学 报2009年·exp[-j2πf0(2RC -2ΔVCt2N-1-i-ΔaCt22N-1-i)](9)上两式中A1,i,A2,i为回波幅度,在一帧回波时间内可近似为常数,ΔV、Δa分别为速度、加速初补偿后的补偿误差值,ti为第i个脉冲速度补偿和包络平移后对应峰值的采样时刻且ti=iT r+2R/C.对二者做相关处理可得二者的相位差Υi=Υ1i-Υ2i=4πTrΔV′C[-(2N-1)f0+i[2f0-(2N-1)Δf]+i22Δf](10)式中τ=(2N-1)T r+4R/C,ΔV′=ΔV-0.5Δaτ0.式(10)中第一项为常数项,第二项为i的线性相位项,第三项为i的平方相位项.可见正负频率步进信号相关处理后为线性调频信号.对于调频步进信号通常有Δf f,式(10)中平方相位项系数远小于线性相位项的系数(参数代入可得二者比值为0.0013)且远小于2π.因而在速度误差ΔV′不太大时Υi=4πTrΔV′C{-(2N-1)f0+i[2f0-(2N-1)Δf+2iΔf]}≈4πTrΔV′C{-(2N-1)f0+i[2f0-(2N-1)Δf+(2N-1)Δf]}=4πTrΔV′C[-(2N-1)f0+2if0](11)可见通过近似将原来的线性调频信号转化为单频信号,对应速度分辨率ΔV=C4Nf0Tr,正好满足(5)式对应的一次相位项补偿误差要求,代入参数可得ΔV= 0.81m/s.然而正负相关法测速的前提是线性调频信号的调频斜率不能太大.随着ΔV′的增加,其等效调频斜率增大,谱峰下降和谱线展宽,速度估计性能下降.假设采用此方法进行速度估计时允许谱峰下降3dB,则由线性调频信号的多普勒容限[8]可知,其测速范围为V∈(-7C 16N2ΔfTr ,7C16N2ΔfT r),代入参数可得V∈(-10m/s,10m/s).尽管正负相关法分辨率满足速度补偿要求,但其测速范围小,当速度超出(-7C16N2ΔfTr ,7C16N2ΔfT r)时,此种测速方法恶化.所以在实际工作中,正负相关法测速法应和其他测速方法进行复合测速.实际上对于本文提出的正负调频步进信号仍可利用文献[5]中的时域相关法测速,不同的是此时做相关处理的为正负调频步进信号同一步进方向的两组回波脉冲信号.假设正负调频步进信号每帧的帧周期为4NT r,即ΔT=4NT r,将参数代入正正相关法测速的速度分辨率和测速范围可得此时速度分辨率ΔV= 2.86m/s,测速范围(-183.11m/s,183.11m/s).可见对于正负调频步进信号,可同时利用正正相关法和本文提出的正负相关法进行复合测速,既满足测速精度高又同时满足测量范围大的要求.这种复合测速法对应的速度分辨率ΔV=C4Nf0T r,测速范围V∈-C4ΔfΔT,C4ΔfΔT.需要解释的是,尽管高速运动目标速度远远超出-C4ΔfΔT,C4ΔfΔT,但通常宽带成像都是在窄带稳定跟踪后进行的,且跟踪距离的微分值精度满足V∈-7C16N2ΔfT r,7C16N2ΔfTr.所以可以利用窄带跟踪距离的微分值先对调频步进信号进行速度补偿和包络平移,然后再利用正正相关测速法对目标速度进行粗估计,等速度跟踪稳定后再采用正负相关法进行速度精估计,实现速度的精确估计和跟踪.在工程中可以对相关后数据进行补零FFT处理以提高估计精度[9],考虑运算量和补零效果一般选择4倍补零FFT处理,此时对应速度估计精度V p re=C32Nf0T r,代入参数可得V p re=0.1m/s.为减小随机噪声,在跟踪回路中需进行数据滤波处理.综上所述,本文提出的速度测量流程图如图2所示.651第 3 期袁昊天:调频步进信号高速运动目标径向速度精确测量技术研究4 仿真 由分析可知本文所提的正正相关和正负相关复合测速精度取决于正负相关法,且文献[5]已对正正相关法做了较为详细的分析与仿真,所以本文重点仿真正负相关测速及复合测速性能.定义如下目标运动参数进行仿真:速度V =8000m /s ,目标沿图3(a )所示箭头方向直线飞行,目标的航路捷径r a =60km ,初始径向距离r 0=100km ,飞行过程目标径向速度和加速度如图3所示. 图4为正负相关法峰值和速度关系图.由图可知速度为零时谱峰最大.随着速度的增加,峰值下降且谱线展宽,当速度为10m /s 时,峰值下降3dB .但对比图4(a )、(b )可知,随着信噪比降低主瓣峰值位置基本不变.图5为在[-10m /s ,10m /s ]速度范围内做2000次Monte -Carlo 实验得到的仿真结果.当信噪比为15dB 时,最大速度估计误差为0.1154m /s ,当信噪比下降为5dB 时,其最大估计误差为0.1468m /s ,信噪比下降10dB 速度估计误差仅增加了0.0314m /s.图6是复合测速方法仿真实验得到的结果.图6(a )为未进行加速度补偿时得到的速度估计误差值,由图可知当未进行加速度时速度估计误差远远大于公式(6)补偿精度要求,由公式ΔV ′=ΔV -0.5Δa τ0可知误差主要是由于加速度过大引起的,且与τ0有关.当目标飞至航捷方向时径向加速度最大,对应速度估计误差达到11m /s ,与公式ΔV ′=ΔV -0.5Δa τ0算得结果一致.因而针对高速运动目标本文提出采用先进行加速度补偿再对速度进行估计的方法,图6(b )为仿真结果,其估计误差基本在0.1m /s 范围内.可见,本文提出的速度测量方法具有非常高的精度.从计算量上考虑,传统的最小脉组法[3]采用速度搜索迭代得到速度估计值,每步迭代过程均需做2N 次652 电 子 学 报2009年复乘加运算,且需要速度范围先验信息.而本文仅需一次F FT处理即可得到速度估计值,可见本文所提方法运算量小,满足工程实时处理需要.5 结论 针对调频步进信号高速运动目标本文提出了一种精确的径向速度测量方法,并给出了其工程实现过程,解决了调频步进信号高速运动目标加速度过大时速度测量问题.由仿真结果可知本文所提方法测速精度高,抗噪性能好,运算量小且易于工程实现.另外,由于本文采用了正负调频步进信号,相对于一般调频步进信号具有较强的杂波抑制能力.因而本文算法有着一定的工程应用价值.参考文献:[1]龙腾,毛二可,何佩坤.调频步进雷达信号分析与处理[J].电子学报,1998,12(12):84-88.L ONG Teng,MAO Er-ke,HE Pei-ku n.Analysis and processing of modu lated frequency stepped radar signal[J].Acta Electroni-ca Sinica,1998,12(12):84-88.(in Chinese)[2]Jae So k Son.Range-Doppler Radar Imaging and Motion Com-pensation[M].Artech House,2000.[3]刘铮,张守宏.步进频率雷达目标的运动参数估计[J].电子学报,2000,28(3):43-46.L IU Zheng,Zhang Shou-hong.Estimation of target motion pa-rameter in a stepped frequency pu lses radar[J].Acta Electroni-ca Sinica,2000,28(3):43-46.(in Chinese)[4]牛涛,陈卫东.脉冲步进频率雷达的一种运动补偿新方法[J].中国科学技术大学学报,2005,35(2):161-166.NIU Tao,ChEN Wei-dong.A new method of motion compen-sation for pu lse stepped-frequency radars[J].Journal of Univer-sity of Science and T echnology of China,2005,35(2):161-166.(in Chinese)[5]王桂丽,李兴国.频率步进和脉冲多普勒复合测速研究[J].红外与毫米波学报,2008,27(3):190-192.WAN G Gui-li,LI pound approach of measu ring velocity based on step-frequency and pulse Doppler sy stem[J].J.Infrared Millim.Waves,2008,7(3):190-192.(in Chinese) [6]张群,张涛,张守宏.运动目标环境下的调频步进信号分析[J].西安电子科技大学学报,2001,28(2):220-224.ZHANG Qu n,ZHA NG Tao,ZHANG Shou-ho ng.Study of the chirp modulated by a stepped frequency for a moving target [J].Journal of Xidian University,2001,28(2):220-224.(in Chinese)[7]刘铮,刘宏伟,张守宏.正负步进频率编码信号及其处理[J].信号处理,1999,15(sup):21-25.Liu Zheng,Zhang Shou-hong.Up-dow n step frequency coded signal and its process[J].Signal Processing,1999,15(sup):21 -25.(in Chinese)[8]文树梁,袁起,何佩坤等.宽带线性调频雷达信号多普勒效应分析与处理[J].系统工程与电子技术,2005,27(4): 573-577.Wen Shu-liang,YUAN Qi,HE Pei-kun.Doppler effect analysis and processing fo r wideband linear frequency modulated radar signal[J].System Engineering and Electronics,2005,27(4): 573-577.(in Chinese)[9]YUAN Hao-tian,CHENG Zhen,WEN Shu-liang,et al.Studyon radar target imaging and velocity measurement simultane-ously based on step frequ ency waveforms[A].Asia and Pacific Co nference on Synthetic Aperture Radar[C].Huangshan:IEEE Press,2007.404-407.作者简介:袁昊天 男,1981年生于河南省漯河市.2004年毕业于电子科技大学电子工程系,同年9月进入中国航天二院攻读硕士学位,现为航天二院23所在读博士生.主要研究方向为雷达系统和雷达成像技术.Email:joe007@文树梁 研究员,研究生导师.航天23所研发中心主任,研究方向为雷达系统和雷达信号处理.程臻 研究员,博士生导师.航天23所所长,研究方向为雷达系统、天线与微波技术、信号处理等.653第 3 期袁昊天:调频步进信号高速运动目标径向速度精确测量技术研究。
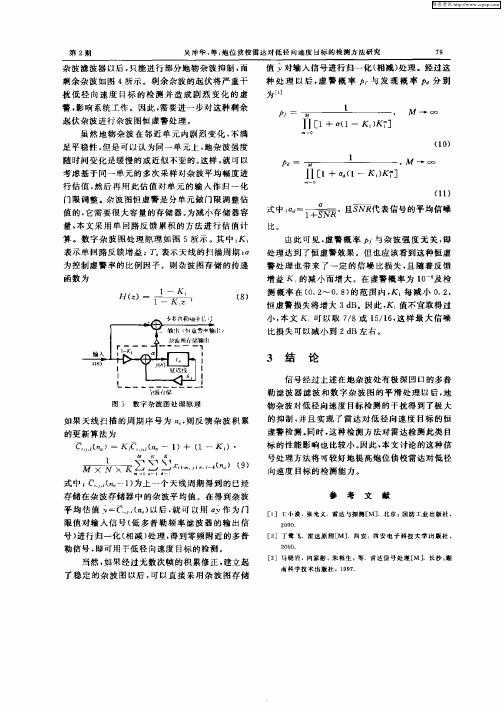
SA天气雷达径向速度“杂散”特征分析陈艳【摘要】为了明确SA天气雷达径向速度中的"杂散"特征,选择了相邻距离库的信噪比差值、相邻距离库的径向速度差、相邻方位的径向速度差、速度沿径向的纹理,速度沿方位的纹理5个参量进行计算,并借鉴K-领域频数法对计算结果进行了统计分析,发现相邻距离库的信噪比差值主要位于(-5 dB,5 dB),占总数据的85%以上,与径向速度相关的4个参量主要位于(-10 m/s,10 m/s),除了速度沿方位的纹理所占比例小于80%外,其余3个参量所占比例均大于80%。
5个参量的变化趋势一致。
由于径向速度大部分是连续的,信噪比差值与速度“杂散”存在一定的对应关系,当与速度相关的4个参量位于(-10 m/s,10 m/s)之外、相邻距离库的信噪比差值位于(-5 dB,5 dB)之外时,径向速度"杂散"的可能性更大。
%In order to know the "stray" Characteristic of SA Weather radar radial velocity, calculate five parameters (difference of SNR (signal to noise ratio) of adjacent bins, difference of radial velocity of adjacent bins, difference of radial velocity of adjacent azimuth, texture of velocity in radial, texture of velocity in azimuth) and analyze them with K-Neighborhood Frequency Method. It shows the difference of SNR is mainly located (-5 dB,5 dB), more than 85%of the total data. Four parameters related to the radial velocity are mainly located (-10m·s-1, 10m·s-1). Apart from the texture of velocity in azimuth which is less than 80%, the rest of parameters are more than 80%. Five parameters have the same variation tendency. Since the radial velocity is mainly continuous and there is a certain relationship between “stray”and SNR , radial velocity is morelikely "stray" when the four parameters related to velocity are not located in (-10m·s-1, 10m·s-1) the difference of SNR of adjacent bins is not between-5 dB and 5 dB.【期刊名称】《电子设计工程》【年(卷),期】2015(000)003【总页数】5页(P18-22)【关键词】SA天气雷达;径向速度;“杂散”特征分析【作者】陈艳【作者单位】成都信息工程学院电子工程学院,四川成都 610225【正文语种】中文【中图分类】TN959.4目前多普勒天气雷达以线性水平极化方式为主,主要用于探测云和降水。
高性能车载雷达的校准与校验方法研究引言高性能车载雷达的校准与校验是保证雷达传感器准确性和可靠性的重要环节。
随着车辆自动驾驶技术的快速发展,车载雷达作为感知环境的关键组成部分,其性能要求日益提高。
本文旨在研究高性能车载雷达的校准与校验方法,以提高雷达系统的准确性和鲁棒性。
一、车载雷达的校准方法研究1. 雷达信号处理校准车载雷达的信号处理往往需要考虑到多种因素,如径向速度测量、目标距离测量、方位角和仰角测量等。
因此,对雷达信号进行准确的校准是保证系统性能的关键。
目前常用的方法包括校正目标反射率、校准发射功率,以及校正目标距离和方位角误差等。
在校准过程中,可以通过与地面反射器进行对比,或通过与其他传感器(如摄像头)进行联合校准,提高雷达信号的精确度和一致性。
2. 雷达天线校准车载雷达的天线是雷达系统进行探测的重要部分。
天线校准主要涉及天线指向性、天线增益、波束宽度等参数的准确测量与校正。
常用的校准方法包括静态校准和动态校准。
静态校准主要通过辐射场测试,利用人工或自动化工具进行天线辐射图像的测量和分析;动态校准则通过利用已知目标进行实时检测和反馈,进行辐射场的动态校准。
这些校准方法可以提高雷达的方向性和空间感知能力。
二、车载雷达的校验方法研究车载雷达的校验主要用于验证雷达的准确性和可靠性,确保系统在实际环境中工作的稳定性。
常见的校验方法包括以下几个方面:1. 校验雷达的目标检测能力目标检测能力是车载雷达的核心功能之一。
校验雷达的目标检测能力需要考虑到目标的尺寸、形状、速度、距离等因素。
可以通过在实际道路上模拟不同类型目标进行验证。
在校验过程中,需要比对雷达检测到的目标与实际场景中的目标进行对比分析,评估雷达的检测准确性和一致性。
2. 校验雷达的环境感知能力环境感知是自动驾驶系统中至关重要的一环。
校验雷达的环境感知能力包括对路面、障碍物、行人等多种目标的识别和跟踪能力。
可以通过模拟不同路况,在实际道路上进行测试,评估雷达的环境感知能力。
基于径向速度检验的雷达网距离多假目标鉴别
吉喆;王国宏;张翔宇
【期刊名称】《电光与控制》
【年(卷),期】2017(024)007
【摘要】针对雷达网在鉴别距离多假目标干扰过程中,鉴别效果随距离多假目标密集程度增大而变差的问题,提出了一种基于目标径向速度估计的距离多假目标干扰鉴别方法.首先,选定基准雷达并进行量测分组预处理,将其他组网雷达目标量测转换至基准雷达局部坐标系下进行基于位置信息的量测关联,以初步排除不相关的虚假量测与杂波,同时减小计算量;然后,基于坐标转换后量测的位置信息估计出目标径向速度,与基准雷达径向速度量测进行检验,以实现虚假目标的鉴别.仿真结果表明,此方法在距离多假目标密集程度较大的情况下具有较高的正确鉴别率,且能够对目标进行稳定跟踪.
【总页数】7页(P17-22,27)
【作者】吉喆;王国宏;张翔宇
【作者单位】海军航空工程学院信息融合研究所,山东烟台 264001;海军航空工程学院信息融合研究所,山东烟台 264001;海军航空工程学院信息融合研究所,山东烟台 264001
【正文语种】中文
【中图分类】TN957
【相关文献】
1.基于马氏距离的雷达网有源假目标干扰鉴别技术 [J], 杨忠;王国宏;孙殿星;贺达超;刘源
2.基于空时特性的雷达网距离多假目标鉴别 [J], 吉喆;王国宏;孙殿星;张翔宇
3.距离多假目标干扰下雷达网优化选择研究 [J], 杨忠;王国宏;孙殿星;贺达超
4.基于多重判别的雷达网距离向多干扰目标鉴别 [J], 王国宏;吉喆
5.距离假目标欺骗干扰下雷达网目标跟踪技术 [J], 李迎春;贾聪乐;李燕
因版权原因,仅展示原文概要,查看原文内容请购买。