循迹小车原理.pdf
- 格式:pdf
- 大小:346.31 KB
- 文档页数:9
目录摘要 (2)1.1系统组成结构 (3)1.2应用软件介绍 (3)1.3原理分析 (4)第二章硬件电路原理图 (5)2.1系统硬件设计原理图 (5)2.2单片机系统电路图 (6)2.3电源电路图 (7)2.4电动机控制驱动图 (8)2.5电机控制方法 (9)2.6循迹小车光电采样电路 (10)第三章元器件介绍 (11)3.1低压差稳压芯片LM2940简介 (11)3.2用于避障功能的光电传感器 (11)3.3黑白线检测传感器 (12)3.4常用H桥集成电路芯片L298 (12)第四章软件系统的实现 (14)4.1主程序设计 (15)4.2设计思路 (15)设计总结 (16)参考文献 ........................................... 错误!未定义书签。
附录:源程序代码 . (18)摘要智能车以及在智能车辆基础上开发出来的产品已成为航天、医疗、工业控制、物流等各个领域的关键设备因此世界上许多国家都在积极进行智能车的研究和开发设计。
本文介绍了以AT89C51单片机为核心控制系统,通过传感器读入数据,采用红外对管获取赛道的信息。
经单片机处理后,输出控制信号给马达驱动电路,来控制马达的正反转动。
所以整个过程不需要人来控制,当不同的传感器检测到黑线时,马达会有不同的转动方向。
以达到智能小车循迹运行的目地,从而实现了简单的智能控制。
智能小车的结构主要分为以下几个部分:1. 循迹模块:用于探测黑线的位置,基础由若干个光电管组成,通过反射红外线的变化判断黑线的有无。
高年级的同学建议尝试使用摄像头等作为传感器。
3. 电机驱动模块,本系统用两个直流电机。
由于单片机输出的电流有限,无法直接驱动电机进行工作,因此需要通过专用的电路进行驱动,只要单片机给出相应的控制信号,便可控制电机工作,本文以较为常用的H桥驱动芯片L298N 为例,鼓励大家自行选择更合适的驱动方案。
4. 单片机模块,根据使用的传感器和控制策略的不同,单片机的选择也不同,对于低年级刚入门的同学可以使用51 单片机,有一定基础的同学可以使用性能稍强的AVR 系列,高年级同学推荐使用MSP430 或者S12 等其他性能更强的单片机。
寻迹小车在历届全国大学生电子设计竞赛中多次出现了集光、机、电于一体的简易智能小车题目。
笔者通过论证、比较、实验之后,制作出了简易小车的寻迹电路系统。
整个系统基于普通玩具小车的机械结构,并利用了小车的底盘、前后轮电机及其自动复原装置,能够平稳跟踪路面黑色轨迹运行。
总体方案整个电路系统分为检测、控制、驱动三个模块。
首先利用光电对管对路面信号进行检测,经过比较器处理之后,送给软件控制模块进行实时控制,输出相应的信号给驱动芯片驱动电机转动,从而控制整个小车的运动。
系统方案方框图如图1所示。
图 1 智能小车寻迹系统框图传感检测单元小车循迹原理该智能小车在画有黑线的白纸“路面”上行驶,由于黑线和白纸对光线的反射系数不同,可根据接收到的反射光的强弱来判断“道路”—黑线。
笔者在该模块中利用了简单、应用也比较普遍的检测方法——红外探测法。
红外探测法,即利用红外线在不同颜色的物理表面具有不同的反射性质的特点。
在小车行驶过程中不断地向地面发射红外光,当红外光遇到白色地面时发生漫发射,反射光被装在小车上的接收管接收;如果遇到黑线则红外光被吸收,则小车上的接收管接收不到信号。
传感器的选择市场上用于红外探测法的器件较多,可以利用反射式传感器外接简单电路自制探头,也可以使用结构简单、工作性能可靠的集成式红外探头。
ST系列集成红外探头价格便宜、体积小、使用方便、性能可靠、用途广泛,所以该系统中最终选择了ST168反射传感器作为红外光的发射和接收器件,其内部结构和外接电路均较为简单,如图2所示:图 2 ST168检测电路ST168采用高发射功率红外光、电二极管和高灵敏光电晶体管组成,采用非接触式检测方式。
ST168的检测距离很小,一般为8~15毫米,因为8毫米以下是它的检测盲区,而大于15毫米则很容易受干扰。
笔者经过多次测试、比较,发现把传感器安装在距离检测物表面10毫米时,检测效果最好。
R1限制发射二极管的电流,发射管的电流和发射功率成正比,但受其极限输入正向电流50mA的影响,用R1=150的电阻作为限流电阻,Vcc=5V作为电源电压,测试发现发射功率完全能满足检测需要;可变电阻R2可限制接收电路的电流,一方面保护接收红外管;另一方面可调节检测电路的灵敏度。
智能循迹小车的引言概述智能循迹小车是近年来兴起的一种智能机器人,它能够通过内置的传感器和程序,自动识别和跟踪预定的路径。
这种小车使用了先进的计算机视觉技术和控制算法,能够在各种环境中准确地进行循迹。
智能循迹小车在许多领域中都得到了广泛的应用,包括工业自动化、物流运输、仓储管理等。
本文将对智能循迹小车的原理、技术和应用进行详细阐述。
智能循迹小车的原理和技术1. 传感器技术a. 摄像头传感器:通过摄像头传感器,智能循迹小车可以捕捉环境中的图像,并进行图像处理和识别。
b. 距离传感器:距离传感器可以帮助智能循迹小车感知周围环境中的障碍物,并避免碰撞。
c. 地盘传感器:地盘传感器用于检测小车在路径上的位置和姿态,以便进行准确的定位和导航。
2. 计算机视觉技术a. 特征提取:通过计算机视觉技术,智能循迹小车可以从摄像头捕捉的图像中提取关键特征,例如路径轮廓、颜色等。
b. 物体识别:利用深度学习算法,智能循迹小车可以识别环境中的物体,例如道路标志和交通信号灯,以便做出相应的反应。
c. 路径规划:根据图像处理和物体识别的结果,智能循迹小车可以计算出最优的路径规划,以达到快速而安全地循迹的目的。
3. 控制算法a. PID控制算法:智能循迹小车使用PID控制算法来实现精确的速度和方向控制,以便按照预定的路径进行循迹。
b. 路径校正算法:当智能循迹小车发现偏离路径时,会通过路径校正算法对速度和方向进行调整,以便重新回到预定的路径上。
智能循迹小车的应用1. 工业自动化a. 生产线物料运输:智能循迹小车可以自动将物料从一个地点运输到另一个地点,减少人力成本和提高生产效率。
b. 仓储管理:智能循迹小车可以在仓库中自动识别货物并进行搬运和分拣,提升仓储管理的效率和精确度。
2. 物流运输a. 快递配送:智能循迹小车可以在城市道路上按照预定的路径进行循迹,实现快递的自动配送和准时派送。
b. 高速公路货物运输:智能循迹小车可以在高速公路上准确无误地进行循迹,减少人为驾驶过程中的车祸风险。
寻迹小车在历届全国大学生电子设计比赛中多次消失了集光.机.电于一体的简略单纯智能小车标题.笔者经由过程论证.比较.实验之后,制造出了简略单纯小车的寻迹电路体系.全部体系基于通俗玩具小车的机械构造,并运用了小车的底盘.前后轮电机及其主动回复复兴装配,可以或许安稳跟踪路面黑色轨迹运行.总体计划全部电路体系分为检测.掌握.驱动三个模块.起首运用光电对管对路面旌旗灯号进行检测,经由比较器处理之后,送给软件掌握模块进行及时掌握,输出响应的旌旗灯号给驱动芯片驱动电机迁移转变,从而掌握全部小车的活动.体系计划方框图如图1所示.图 1 智能小车寻迹体系框图传感检测单元小车循迹道理该智能小车在画有黑线的白纸“路面”上行驶,因为黑线和白纸对光线的反射系数不合,可依据接收到的反射光的强弱来断定“道路”—黑线.笔者在该模块中运用了简略.运用也比较广泛的检测办法——红外探测法.红外探测法,即运用红外线在不合色彩的物理概况具有不合的反射性质的特色.在小车行驶进程中不竭地向地面发射红外光,当红外光碰到白色地面时产生漫发射,反射光被装在小车上的接收管接收;假如碰到黑线则红外光被接收,则小车上的接收管接收不到旌旗灯号.传感器的选择市场上用于红外探测法的器件较多,可以运用反射式传感器外接简略电路克己探头,也可以运用构造简略.工作机能靠得住的集成式红外探头.ST系列集成红外探头价钱便宜.体积小.运用便利.机能靠得住.用处广泛,所以该体系中最终选择了ST168反射传感器作为红外光的发射和接收器件,其内部构造和外接电路均较为简略,如图2所示:图 2 ST168检测电路ST168采取高发射功率红外光.电二极管和高敏锐光电晶体管构成,采取非接触式检测方法.ST168的检测距离很小,一般为8~15毫米,因为8毫米以下是它的检测盲区,而大于15毫米则很轻易受干扰.笔者经由多次测试.比较,发明把传感器装配在距离检测物概况10毫米时,检测后果最好.R1限制发射二极管的电流,发射管的电流和发射功率成正比,但受其极限输入正向电流50mA的影响,用R1=150的电阻作为限流电阻,Vcc=5V作为电源电压,测试发明发射功率完万能知足检测须要;可变电阻R2可限制接收电路的电流,一方面呵护接收红外管;另一方面可调节检测电路的敏锐度.因为传感器输出端得到的是模仿电压旌旗灯号,所以在输出端增长了比较器,先将ST168输出电压与2.5V进行比较,再送给单片机处理和掌握.传感器的装配准确选择检测办法和传感器件是决议循迹后果的主要身分,并且准确的器件装配办法也是循迹电路利害的一个主要身分.从简略.便利.靠得住等角度动身,同时在底盘装设4个红外探测头,进行两级偏向改正掌握,将大大进步其循迹的靠得住性,具体地位散布如图3所示.图3 红外探头的散布图图中循迹传感器全体在一条直线上.个中X1与Y1为第一级偏向掌握传感器,X2与Y2为第二级偏向掌握传感器,并且黑线统一边的两个传感器之间的宽度不得大于黑线的宽度.小车进步时,始终保持(如图3中所示的行走轨迹黑线)在X1和Y1这两个第一级传感器之间,当小车偏离黑线时,第一级传感器就能检测到黑线,把检测的旌旗灯号送给小车的处理.掌握体系,掌握体系发出旌旗灯号对小车轨迹予以改正.第二级偏向探测器现实是第一级的后备呵护,它的消失是斟酌到小车因为惯性过大会依旧偏离轨道,再次对小车的活动进行改正,从而进步了小车循迹的靠得住性.软件掌握单元单片机选型及程序流程此部分是全部小车运行的焦点部件,起着掌握小车所有运行状况的感化.掌握办法有许多,大部分都采取单片机掌握.因为51单片机具有价钱低廉是运用简略的特色,这里选择了ATMEL公司的AT89S51作为掌握焦点部件,其程序掌握方框图如图4所示.图4 体系的程序流程图小车进入循迹模式后,即开端不断地扫描与探测器衔接的单片机I/O口,一旦检测到某个I/O口有旌旗灯号变更,程序就进入断定程序,把响应的旌旗灯号发送给电念头从而改正小车的状况. 车速的掌握车速调节的办法有两种:一是用步进电机代替小车上原有的直流电机;二是在原有直流电机的基本上,采取pwm调速法进行调速.斟酌到机械装配便利于修正等身分,这里选择后者,运用单片机输出端输出高电平的脉宽及其占空比的大小来掌握电机的转速,从而掌握小车的速度.经由多次实验,最终肯定适合的脉宽和占空比,基本性包管小车在所须要的速度规模内安稳前行.电机驱动单元从单片机输出的旌旗灯号功率很弱,即使在没有其它外在负载时也无法带动电机,所以在现实电路中我们参加了电机驱动芯片进步输入电机旌旗灯号的功率,从而可以或许依据须要掌握电机迁移转变.依据驱动功率大小以及衔接电路的简化请求选择L298N,其外形.管脚分布如图5所示.图5 L298N管脚散布图从图中可以知道,一块L298N芯片可以或许驱动两个电机迁移转变,它的使能端可以外接高下电平,也可以运用单片机进行软件掌握,极大地知足各类庞杂电路须要.别的,L298N的驱动功率较大,可以或许依据输入电压的大小输出不合的电压和功率,解决了负载才能不敷这个问题.结语此计划选择的器件比较简略,现实中也很轻易实现.经由多次测试,成果标明在必定的弧度规模内,小车可以或许沿着黑线轨迹行进,达到了预期目的.缺少之处,因为小车采取直流电机,其速度掌握不敷准确和稳固,不克不及实现急转和大弧度的拐弯.程序#include<reg51.h>#define uchar unsigned char#define uint unsigned intuchar pro_left,pro_right,i,j; //阁下占空比标记sbit left1=P2^0;sbit left2=P2^1;sbit right1=P2^2;sbit right2=P2^3;sbit en1=P1^0;sbit en2=P1^1;//循迹口三个红别传感器sbit left_red=P1^2; //白线地位sbit mid_red=P1^3; //黑线地位sbit right_red=P1^4; //白线地位void delay(uint z){uchar i;while(z){for(i=0;i<121;i++);}}void init(){left_red=0; //白线地位mid_red=1; //黑线地位right_red=0;TMOD=0X01;//准时器0选用方法1 TH0=(65536100)/256;TL0=(65536100)%256;EA=1;ET0=1;TR0=1;en1=1;en2=1;}void time0(void)interrupt 1 {i++;j++;if(i<=pro_right) {en1=1;} else en1=0;if(i==40) {en1=~en1;i=0;}if(j<=pro_left) {en2=1;}else en2=0;if(j==40) {en2=~en2;j=0;}TH0=(65536100)/256;TL0=(65536100)%256;}void straight() //走直线函数{pro_right=39;pro_left=39;left1=0;left2=1;right1=1;right2=0;}void turn_left() //左转弯函数{pro_right=5;pro_left=39;left1=0;left2=1;right1=1;right2=0;}void turn_right() //右转弯函数{pro_right=39;pro_left=5;left1=0;left2=1;right1=1;right2=0;}void turn_back() //撤退退却(反转)函数{left1=1;left2=0;right1=0;right2=1;pro_right=39;pro_left=39;}void infrared() //循迹{uchar flag;if(left_red==1){flag=1;}elseif(right_red==1){flag=2;}elseif((left_red==0)&(mid_red==0)&(right_red==0)) {flag=3;}else flag=0;switch (flag){case 0: straight();break;case 1: turn_left();break;case 2: turn_right();break;case 3: turn_back();break;default:break;}}void main(void){init();delay(1);while(1){infrared();// straight();}}void int0(void)interrupt 0 {}。
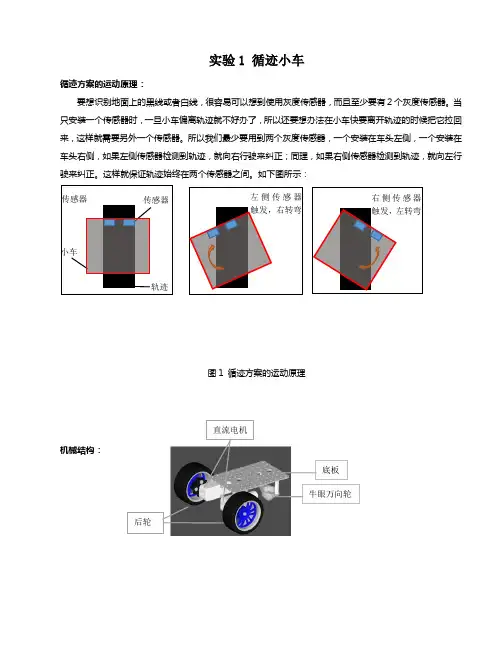
实验1 循迹小车循迹方案的运动原理:要想识别地面上的黑线或者白线,很容易可以想到使用灰度传感器,而且至少要有2个灰度传感器。
当只安装一个传感器时,一旦小车偏离轨迹就不好办了,所以还要想办法在小车快要离开轨迹的时候把它拉回来,这样就需要另外一个传感器。
所以我们最少要用到两个灰度传感器,一个安装在车头左侧,一个安装在车头右侧,如果左侧传感器检测到轨迹,就向右行驶来纠正;同理,如果右侧传感器检测到轨迹,就向左行驶来纠正。
这样就保证轨迹始终在两个传感器之间。
如下图所示:图1 循迹方案的运动原理机械结构:图2 寻迹小车机械结构程序代码:int pin[2] = {A0, A4 }; //如上图,从左至右对应int velocity; //定义速率void setup(){pinMode( 5 , OUTPUT);pinMode( 6 , OUTPUT);pinMode( 9 , OUTPUT);pinMode( 10 , OUTPUT);velocity=150;}void loop(){while(!digitalRead(pin[0])&&! digitalRead(pin[1])) //当两个传感器都检测黑色时,小车前进{Forwards();}while( digitalRead(pin[0])&& !digitalRead(pin[1]))//当左侧传感器都检测白色时,小车右转弯{Right();}while(!digitalRead(pin[0])&& digitalRead(pin[1]))//当右侧传感器都检测白色时,小车左转弯{Left();}while( digitalRead(pin[0])&& digitalRead(pin[1]))//当两侧传感器都检测白色时,小车停止{Stop();}}void Left() //小车左转子函数{analogWrite( 5 , 0);analogWrite( 6 , velocity ); //驱动右侧电机转动analogWrite( 9 , 0 );analogWrite( 10 , 0 ); //左侧电机停转}void Right() //小车右转子函数{analogWrite( 5 , 0 );analogWrite( 6 , 0 ); //右侧电机停转analogWrite( 9 , 0);analogWrite( 10 , velocity );//驱动左侧电机转动}void Forwards() //小车前进子函数{analogWrite( 5 , 0); analogWrite( 6 , velocity ); analogWrite( 9 , 0 ); analogWrite( 10 , velocity );}void Stop() //小车停止子函数{analogWrite( 5 , 0 ); analogWrite( 6 , 0 ); analogWrite( 9 , 0 ); analogWrite( 10 , 0 );}要零件附件。

循迹小车原理
循迹小车原理
循迹小车是指一种可以按照设定路径自动行走的机器人小车,它的原理是利用传感器检测已设定的路径上的信息,根据这些信息控制电机的转动方向和速度,达到自动行走的目的。
循迹小车的核心元件是传感器,它可以检测到路径上的信息,并将这些信息传递给控制器。
传感器有多种,有光电传感器、超声波传感器、磁感应传感器等。
光电传感器是指将特定波长的光照射到路径上,由传感器检测特定传感器捕捉到的信号,从而控制电机的转动方向。
超声波传感器是指将超声波辐射到路径上,通过检测超声波反射的信号,控制电机的转动方向和速度。
磁感应传感器是指将磁感应体置于路径上,检测磁感应体反应的信号,控制电机的转动方向和速度。
控制器是循迹小车中最重要的部件,它接收传感器捕获的信号,根据信号的大小,控制电机的转动方向和速度,从而完成循迹小车的自动行走。
循迹小车就是这样,利用传感器检测路径上的信息,根据信号的大小控制电机的转动方向和速度,从而完成自动行走的任务。
它既可以用于科学研究,也可以作为一种新型的机器人玩具来模拟人类行走,让孩子得到更多的乐趣。

寻迹小车在历届全国大学生电子设计竞赛中多次出现了集光、机、电于一体的简易智能小车题目。
笔者通过论证、比较、实验之后,制作出了简易小车的寻迹电路系统。
整个系统基于普通玩具小车的机械结构,并利用了小车的底盘、前后轮电机及其自动复原装置,能够平稳跟踪路面黑色轨迹运行。
总体方案整个电路系统分为检测、控制、驱动三个模块。
首先利用光电对管对路面信号进行检测,经过比较器处理之后,送给软件控制模块进行实时控制,输出相应的信号给驱动芯片驱动电机转动,从而控制整个小车的运动。
系统方案方框图如图1所示。
图1 智能小车寻迹系统框图传感检测单元小车循迹原理该智能小车在画有黑线的白纸“路面”上行驶,由于黑线和白纸对光线的反射系数不同,可根据接收到的反射光的强弱来判断“道路”—黑线。
笔者在该模块中利用了简单、应用也比较普遍的检测方法——红外探测法。
红外探测法,即利用红外线在不同颜色的物理表面具有不同的反射性质的特点。
在小车行驶过程中不断地向地面发射红外光,当红外光遇到白色地面时发生漫发射,反射光被装在小车上的接收管接收;如果遇到黑线则红外光被吸收,则小车上的接收管接收不到信号。
传感器的选择市场上用于红外探测法的器件较多,可以利用反射式传感器外接简单电路自制探头,也可以使用结构简单、工作性能可靠的集成式红外探头。
ST系列集成红外探头价格便宜、体积小、使用方便、性能可靠、用途广泛,所以该系统中最终选择了ST168反射传感器作为红外光的发射和接收器件,其内部结构和外接电路均较为简单,如图2所示:图2 ST168检测电路ST168采用高发射功率红外光、电二极管和高灵敏光电晶体管组成,采用非接触式检测方式。
ST168的检测距离很小,一般为8~15毫米,因为8毫米以下是它的检测盲区,而大于15毫米则很容易受干扰。
笔者经过多次测试、比较,发现把传感器安装在距离检测物表面10毫米时,检测效果最好。
R1限制发射二极管的电流,发射管的电流和发射功率成正比,但受其极限输入正向电流50mA的影响,用R1=150的电阻作为限流电阻,Vcc=5V作为电源电压,测试发现发射功率完全能满足检测需要;可变电阻R2可限制接收电路的电流,一方面保护接收红外管;另一方面可调节检测电路的灵敏度。
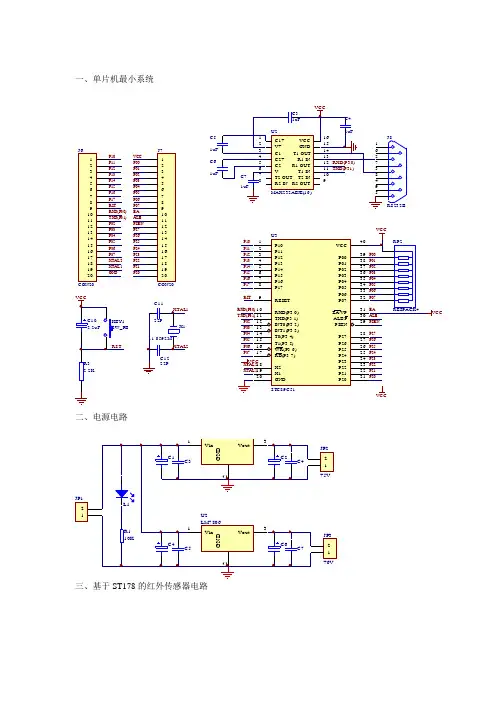
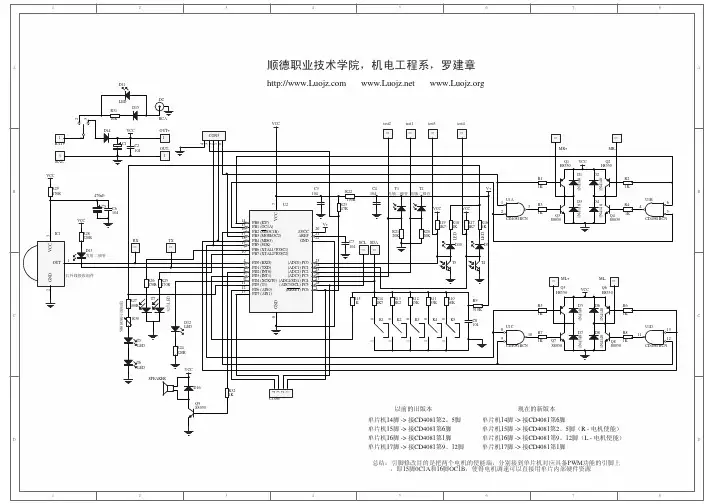
一、单片机最小系统
二、电源电路
U1
三、基于ST178的红外传感器电路
+5
注意事项:
1、请首先查询ST178的器件手册,确定各引脚的功能,然后再对照电路原理图焊接。
2、建议首先设计PCB ,然后根据PCB 焊接实物。
四、基于LM324的比较器电路(输出高电平5v ,低电平)
P 10
五、电机驱动电路
注意事项:
1、图中的Rs3、Rs4、Rq1、Rq2不要省,否则可能因为单片机带负载能力不强而不能正常工作。
2、在写程序时,不能让Qi 、Hi 同时为低电平,否则会使Q9~Q12短路导通,并很快被烧毁。
同理,不能让Li 、Ri 同时为低电平。
3、建议首先画出PCB ,然后根据PCB 焊接电路。
4、建议同学们先焊接图中的上半部分所示的一路驱动电路,测试成功后再焊接下半部分那一组电机驱动电路。
智能小车循迹原理智能小车循迹技术是一种基于光电传感器的自动导航技术,通过对地面反射光的检测和分析,实现小车在指定轨迹上行驶的能力。
本文将从传感器原理、信号处理和控制系统三个方面详细介绍智能小车循迹的工作原理。
一、传感器原理智能小车循迹系统主要依靠光电传感器来感知环境,其中常用的光电传感器有红外线传感器和光敏电阻传感器。
红外线传感器是最常见的一种传感器,其工作原理是通过发射和接收红外线来检测地面上的黑线或白线。
当传感器上方是黑线时,地面会吸收红外线,传感器接收到的光强较低;当传感器上方是白线时,地面会反射红外线,传感器接收到的光强较高。
通过检测光强的变化,系统可以确定小车当前位置,以便进行相应的控制。
光敏电阻传感器则是通过光敏电阻的电阻值随光照强度变化来实现检测。
当地面上有黑线时,光敏电阻接收到的光照较强,电阻值较低;当地面上是白线时,光敏电阻接收到的光照较弱,电阻值较高。
通过检测电阻值的变化,系统可以判断小车当前所在位置。
二、信号处理传感器感知到的光信号需要经过一系列的处理和分析,以提取有用的信息。
首先,传感器采集到的光信号需要进行放大和滤波处理,以提高信号的稳定性和可靠性。
接着,通过比较传感器输出信号与设定的阈值,判断当前检测到的是黑线还是白线。
最后,根据检测结果,系统会输出相应的电信号给控制系统,以实现对小车运动的控制。
三、控制系统智能小车循迹系统的控制系统通常由微控制器或单片机来实现。
控制系统根据传感器感知到的信号,判断小车当前位置及偏离轨迹的程度,并根据预设的算法进行相应的控制。
当小车偏离轨迹时,系统会根据传感器的输出信号控制电机的转速和方向,使小车重新回到指定轨迹上。
同时,控制系统还可以实现其他功能,如避障、避免碰撞等。
总结:智能小车循迹原理是基于光电传感器的自动导航技术,通过对地面反射光的检测和分析,实现小车在指定轨迹上行驶的能力。
传感器原理主要是利用红外线传感器或光敏电阻传感器来感知地面上的黑线或白线。
寻迹小车在历届全国大学生电子设计竞赛中多次出现了集光、机、电于一体的简易智能小车题目。
笔者通过论证、比较、实验之后,制作出了简易小车的寻迹电路系统。
整个系统基于普通玩具小车的机械结构,并利用了小车的底盘、前后轮电机及其自动复原装置,能够平稳跟踪路面黑色轨迹运行。
总体方案整个电路系统分为检测、控制、驱动三个模块。
首先利用光电对管对路面信号进行检测,经过比较器处理之后,送给软件控制模块进行实时控制,输出相应的信号给驱动芯片驱动电机转动,从而控制整个小车的运动。
系统方案方框图如图1所示。
图1 智能小车寻迹系统框图传感检测单元小车循迹原理该智能小车在画有黑线的白纸“路面”上行驶,由于黑线和白纸对光线的反射系数不同,可根据接收到的反射光的强弱来判断“道路”—黑线。
笔者在该模块中利用了简单、应用也比较普遍的检测方法——红外探测法。
红外探测法,即利用红外线在不同颜色的物理表面具有不同的反射性质的特点。
在小车行驶过程中不断地向地面发射红外光,当红外光遇到白色地面时发生漫发射,反射光被装在小车上的接收管接收;如果遇到黑线则红外光被吸收,则小车上的接收管接收不到信号。
传感器的选择市场上用于红外探测法的器件较多,可以利用反射式传感器外接简单电路自制探头,也可以使用结构简单、工作性能可靠的集成式红外探头。
ST系列集成红外探头价格便宜、体积小、使用方便、性能可靠、用途广泛,所以该系统中最终选择了ST168反射传感器作为红外光的发射和接收器件,其内部结构和外接电路均较为简单,如图2所示:图2 ST168检测电路ST168采用高发射功率红外光、电二极管和高灵敏光电晶体管组成,采用非接触式检测方式。
ST168的检测距离很小,一般为8~15毫米,因为8毫米以下是它的检测盲区,而大于15毫米则很容易受干扰。
笔者经过多次测试、比较,发现把传感器安装在距离检测物表面10毫米时,检测效果最好。
R1限制发射二极管的电流,发射管的电流和发射功率成正比,但受其极限输入正向电流50mA的影响,用R1=150的电阻作为限流电阻,Vcc=5V作为电源电压,测试发现发射功率完全能满足检测需要;可变电阻R2可限制接收电路的电流,一方面保护接收红外管;另一方面可调节检测电路的灵敏度。
循迹避障小车原理一)小车功能实现利用光电传感(红外对射管,红外发射与接收二极管组成)检测黑白线,实现小车能跟着白线(或黑线)行走,同时也可避开障碍物,即小车寻迹过程中,若遇障碍物可自行绕开,绕开后继续寻迹。
二)电路分析1.光电传感循迹光电传感器原理,利用黑白线对红外线不同的反射能力。
然后通过光敏二极管或光敏三极管,接收反射回的不同光强信号,把不同光强转换为电流信号,最后通过电阻,转换为单片机可识别的高低电平。
光电传感器实现循迹的基本电路如下图所示、循迹传感器基本电路电路解释:TC端是传感器工作控制端,为高电平时,发光二极管不工作,传感器休眠,为低电平时,传感器启动。
Signal端为检测信号输出,当遇到黑线,黑线吸收大量的红外线,反射的红外线很弱,光敏三极管不导通,signal输出高电平,当遇到白线,与黑线相反,反射的红外线很强,使光敏三极管导通,sign al输出低电平。
寻迹部分调整左右传感器之间的距离,两探头距离约等于白线宽度最合适,一般白线宽度选择围为3 – 5 厘米比较合适。
注意:该传感器的灵敏度是可调的,偶尔传感器遇到白线却不能送出相应的信号,通过调节传感器上的可调电阻,适当的增大或减小灵敏度。
另外,循迹传感器的安放也算是比较有讲究的,有两种方法,一种是两个都是放置在白线侧但紧贴白线边缘,第二种是都放置在白线的外侧,同样紧贴白线边缘。
我们通常采用第二种方法。
编写程序使小车遇白线时,小车跟着白线走。
当小车先前前进时,如果向左偏离了白线。
那么右边传感器会产生一个低电平,单片机判断这个信号,然后向右拐。
回到白线后。
两传感器输出信号为高电平。
小车前进。
如果小车向右偏离白线,左边传感器产生一个低电平,单片机判断这个信号,然后向左拐。
如此如此,小车必不偏离白线。
若小车的两对光电传感器同时输出的信号为高电平(黑底)或低电平(白底),即单片机判断的都为高电平或低电平,小车向前直走,在此过程中(直走)小车若遇白线,小车又重复上面动作跟着白线走。