计算机图形学第3章-基本光栅图形生成算法
- 格式:ppt
- 大小:2.20 MB
- 文档页数:41
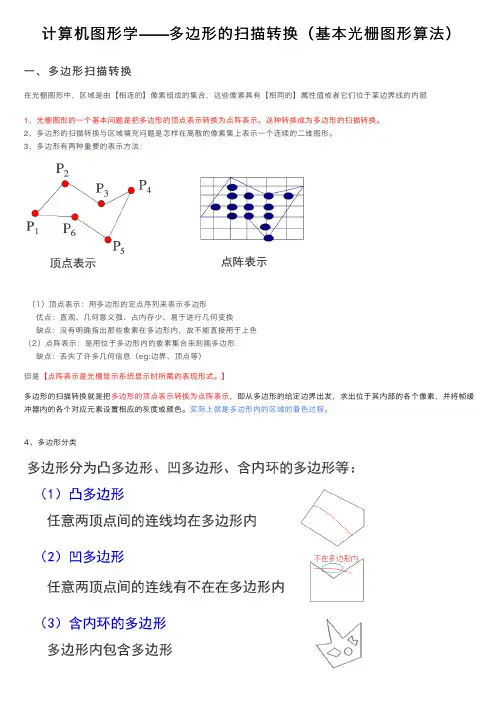
计算机图形学——多边形的扫描转换(基本光栅图形算法)⼀、多边形扫描转换在光栅图形中,区域是由【相连的】像素组成的集合,这些像素具有【相同的】属性值或者它们位于某边界线的内部1、光栅图形的⼀个基本问题是把多边形的顶点表⽰转换为点阵表⽰。
这种转换成为多边形的扫描转换。
2、多边形的扫描转换与区域填充问题是怎样在离散的像素集上表⽰⼀个连续的⼆维图形。
3、多边形有两种重要的表⽰⽅法:(1)顶点表⽰:⽤多边形的定点序列来表⽰多边形优点:直观、⼏何意义强、占内存少、易于进⾏⼏何变换缺点:没有明确指出那些象素在多边形内,故不能直接⽤于上⾊(2)点阵表⽰:是⽤位于多边形内的象素集合来刻画多边形缺点:丢失了许多⼏何信息(eg:边界、顶点等)但是【点阵表⽰是光栅显⽰系统显⽰时所需的表现形式。
】多边形的扫描转换就是把多边形的顶点表⽰转换为点阵表⽰,即从多边形的给定边界出发,求出位于其内部的各个像素,并将帧缓冲器内的各个对应元素设置相应的灰度或颜⾊。
实际上就是多边形内的区域的着⾊过程。
4、多边形分类⼆、X扫描线算法X扫描线算法填充多边形的基本思想是按扫描线顺序,计算扫描线与多边形的相交区间,再⽤要求的颜⾊显⽰这些区间的象素,即完成填充⼯作。
区间的端点可以通过计算扫描线与多边形边界线的交点获得。
如扫描线y=3与多边形的边界相交于4点(2,3)、(4,3)、(7,3)、(9,3)这四个点定义了扫描线从x=2到x=4,从x=7到x=9两个落在多边形内的区间,该区间内像素应取填充⾊。
算法的核⼼是按x递增顺序排列交点的x坐标序列。
由此可得到扫描线算法步骤如下:算法步骤:1.确定多边形所占有的最⼤扫描线数,得到多边形定点的最⼩最⼤值(y min和y max);2.从y min到ymax每次⽤⼀条扫描线进⾏填充;3.对⼀条扫描线填充的过程分为四个步骤:a)求交点;b)把所有交点按递增顺序排序;c)交点配对(第⼀个和第⼆个,第三个和第四个);d)区间填⾊。
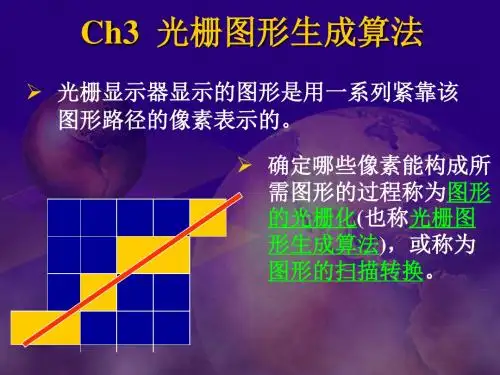
基本图形的光栅化算法如何在指定的输出设备上根据坐标描述构造基本⼆维⼏何图形(点、直线、圆、椭圆、多边形域、字符串及其相关属性等)。
图形⽣成的概念图形的⽣成:是在指定的输出设备上,根据坐标描述构造⼆维⼏何图形。
图形的扫描转换:在光栅显⽰器等数字设备上确定⼀个最佳逼近于图形的象素集的过程。
直线段的扫描转换直线的绘制要求(1)直线要直;(2)直线的端点要准确,⽆定向性⽆断裂;(3)直线的亮度、⾊泽要均匀;(4)画线的速度要快;(5)具有不同的⾊泽、亮度、线型等。
解决的问题:给定直线两端点P0(x0,y0)和P1(x1,y1),画出该直线。
逐点⽐较法:数值微分法(DDA法):增量算法直观、易实现不利于⽤硬件实现x(i+1) = x(i) + 1y(i+1) = y(i) + k中点Bresenhan算法:算法原理:根据直线的斜率确定或选择变量在x或y⽅向上每次递增⼀个单位,⽽另⼀⽅向的增量为1或0,它取决于实际直线与相邻象素点的距离,这⼀距离称为误差项。
中点Bresenham算法——算法步骤输⼊直线的两端点P0(x0,y0)和P1(x1,y1)。
计算初始值△x、△y、D=△x-2△y、x=x0、y=y0。
绘制点(x,y)。
判断D的符号。
若D<0,则(x,y)更新为(x+1,y+1),D更新为D+2△x-2△y;否则(x,y)更新为(x+1,y), D更新为D-2△y。
当直线没有画完时,重复上⼀步骤,否则结束。
改进的Bresenhan算法——算法步骤1.输⼊直线的两端点P0(x0,y0)和P1(x1,y1)。
2.计算初始值△x、△y、e=-△x、x=x0、y=y0。
3.绘制点(x,y)。
4.e更新为e+2△y,判断e的符号。
若e>0,则(x,y)更新为(x+1,y+1),同时将e更新为e-2△x;否则(x,y)更新为(x+1,y)。
5.当直线没有画完时,重复步骤3和4。
否则结束。
圆的扫描转换解决的问题:绘出圆⼼在原点,半径为整数R的圆x2+y2=R2。
计算机图形学——圆的扫描转换(基本光栅图形算法)与直线的⽣成类似,圆弧⽣成算法的好坏直接影响到绘图的效率。
本篇博客将讨论圆弧⽣成的3个主要算法,正负法、Bresenham 法和圆的多边形迫近法,在介绍算法时,只考虑圆⼼在原点,半径为R的情况。
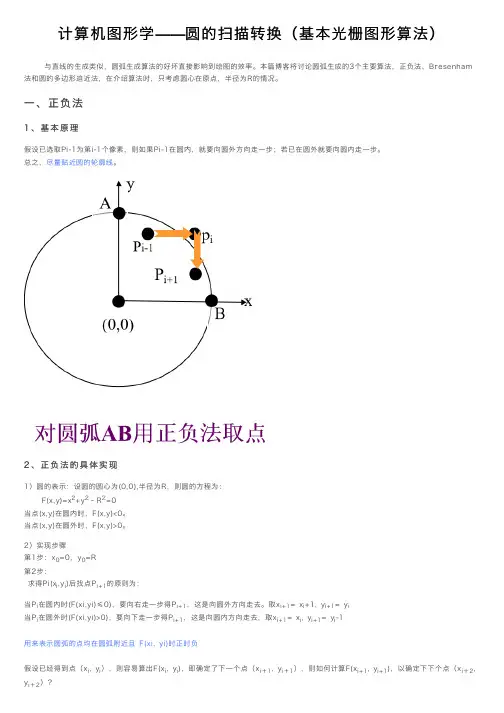
⼀、正负法1、基本原理假设已选取Pi-1为第i-1个像素,则如果Pi-1在圆内,就要向圆外⽅向⾛⼀步;若已在圆外就要向圆内⾛⼀步。
总之,尽量贴近圆的轮廓线。
2、正负法的具体实现1)圆的表⽰:设圆的圆⼼为(0,0),半径为R,则圆的⽅程为:F(x,y)=x2+y2–R2=0当点(x,y)在圆内时,F(x,y)<0。
当点(x,y)在圆外时,F(x,y)>0。
2)实现步骤第1步:x0=0,y0=R第2步:求得Pi(x i,y i)后找点P i+1的原则为:当P i在圆内时(F(xi,yi)≤0),要向右⾛⼀步得P i+1,这是向圆外⽅向⾛去。
取x i+1= x i+1, y i+1= y i当P i在圆外时(F(xi,yi)>0),要向下⾛⼀步得P i+1,这是向圆内⽅向⾛去,取x i+1= x i, y i+1= y i-1⽤来表⽰圆弧的点均在圆弧附近且 F(xi, yi)时正时负假设已经得到点(x i, y i),则容易算出F(x i, y i),即确定了下⼀个点(x i+1, y i+1),则如何计算F(x i+1, y i+1),以确定下下个点(x i+2, y i+2)?分为两种情况:右⾛⼀步后:x i+1=x i+1,y i+1=y i,此时:F(x i+1, y i+1)=x i+12+y i2-R2=x i2+y i2-R2+2x i+1 = F(x i, y i)+2x i+1下⾛⼀步后:x i+1=x i,y i+1=y i-1, 此时:F(x i+1, y i+1)=x i2+(y i-1)2-R2= F(x i, y i)-2y i+1由此可得:确定了F(xi+1, yi+1)之后,即可决定下⼀个点(xi+2, yi+2),选择道理同上。
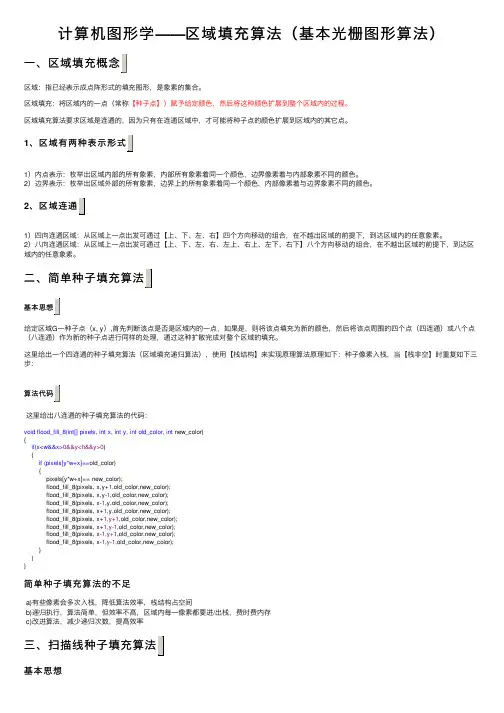
计算机图形学——区域填充算法(基本光栅图形算法)⼀、区域填充概念区域:指已经表⽰成点阵形式的填充图形,是象素的集合。
区域填充:将区域内的⼀点(常称【种⼦点】)赋予给定颜⾊,然后将这种颜⾊扩展到整个区域内的过程。
区域填充算法要求区域是连通的,因为只有在连通区域中,才可能将种⼦点的颜⾊扩展到区域内的其它点。
1、区域有两种表⽰形式1)内点表⽰:枚举出区域内部的所有象素,内部所有象素着同⼀个颜⾊,边界像素着与内部象素不同的颜⾊。
2)边界表⽰:枚举出区域外部的所有象素,边界上的所有象素着同⼀个颜⾊,内部像素着与边界象素不同的颜⾊。
21)四向连通区域:从区域上⼀点出发可通过【上、下、左、右】四个⽅向移动的组合,在不越出区域的前提下,到达区域内的任意象素。
2)⼋向连通区域:从区域上⼀点出发可通过【上、下、左、右、左上、右上、左下、右下】⼋个⽅向移动的组合,在不越出区域的前提下,到达区域内的任意象素。
⼆、简单种⼦填充算法给定区域G⼀种⼦点(x, y),⾸先判断该点是否是区域内的⼀点,如果是,则将该点填充为新的颜⾊,然后将该点周围的四个点(四连通)或⼋个点(⼋连通)作为新的种⼦点进⾏同样的处理,通过这种扩散完成对整个区域的填充。
这⾥给出⼀个四连通的种⼦填充算法(区域填充递归算法),使⽤【栈结构】来实现原理算法原理如下:种⼦像素⼊栈,当【栈⾮空】时重复如下三步:这⾥给出⼋连通的种⼦填充算法的代码:void flood_fill_8(int[] pixels, int x, int y, int old_color, int new_color){if(x<w&&x>0&&y<h&&y>0){if (pixels[y*w+x]==old_color){pixels[y*w+x]== new_color);flood_fill_8(pixels, x,y+1,old_color,new_color);flood_fill_8(pixels, x,y-1,old_color,new_color);flood_fill_8(pixels, x-1,y,old_color,new_color);flood_fill_8(pixels, x+1,y,old_color,new_color);flood_fill_8(pixels, x+1,y+1,old_color,new_color);flood_fill_8(pixels, x+1,y-1,old_color,new_color);flood_fill_8(pixels, x-1,y+1,old_color,new_color);flood_fill_8(pixels, x-1,y-1,old_color,new_color);}}}简单种⼦填充算法的不⾜a)有些像素会多次⼊栈,降低算法效率,栈结构占空间b)递归执⾏,算法简单,但效率不⾼,区域内每⼀像素都要进/出栈,费时费内存c)改进算法,减少递归次数,提⾼效率三、扫描线种⼦填充算法基本思想从给定的种⼦点开始,填充当前扫描线上种⼦点所在的⼀区段,然后确定与这⼀段相邻的上下两条扫描线上位于区域内的区段(需要填充的区间),从这些区间上各取⼀个种⼦点依次把它们存起来,作为下次填充的种⼦点。