果蔬采摘机器人末端执行器的结构组成现状分析
- 格式:docx
- 大小:848.44 KB
- 文档页数:17
果蔬采摘机器人末端执行器研究现状
胡皓若;张跃跃;周佳良;陈青;王金鹏
【期刊名称】《中国农机化学报》
【年(卷),期】2024(45)4
【摘要】目前果蔬采摘大多以人工采摘为主,存在效率低、采摘成本大等缺点,同时随着人口老龄化问题的日益严重,劳动力紧缺,制约农业的快速发展。
末端执行器作为果蔬采摘机器人的关键部件,在很大程度上影响着采摘机器人的采摘率和损伤率,对末端执行器的研究具有至关重要的意义。
充分阐述当前国内外果蔬采摘机器人的研究现状。
根据采摘方式和驱动方式的不同对采摘末端执行器进行归纳,总结出采摘过程中致损原因。
通过列举典型采摘末端执行器,分析末端执行器在采摘过程中果实致损的原因;通过对现有采摘机器人末端执行器方案的具体参数对比梳理,提出存在识别定位不准、采摘效率低等问题,并从损伤率、采摘效率等方面对未来末端执行器进行展望。
【总页数】6页(P231-236)
【作者】胡皓若;张跃跃;周佳良;陈青;王金鹏
【作者单位】南京林业大学机械电子工程学院
【正文语种】中文
【中图分类】S225;TP242
【相关文献】
1.采摘机器人末端执行器研究现状与展望
2.果蔬采摘机器人末端执行器的柔顺抓取力控制
3.果蔬采摘机器人末端执行器研究综述
4.果蔬采摘机器人末端执行器研究进展与分析
5.果蔬采摘机器人研究现状与进展分析
因版权原因,仅展示原文概要,查看原文内容请购买。


/发展研究|四川农业与农机/2014年6期|进方向平行滑动,可以保证机构不干扰视觉传感器。
其末端执行器由3把电热刀和围着主茎配置的气动驱动器组成,电热刀的安装位置使其可以从3个方向围住主茎,电热刀上方有V 字形引导器。
首先,视觉传感器识别需要摘除的叶子及其主茎,检测出其位置,接近被摘叶下方的主茎。
电热刀的引导器沿主茎向上滑动,叶柄总可以接触到3个电热刀中的一个,叶柄和电热刀一接触上,电流立即导通,烧断叶柄,摘除叶子。
利用热切断叶柄,还能对切断部位消毒,可以防止病菌从切口侵入。
这种机器人的采摘速度为45s/根,成功率约为80%。
2)冈山大学和井关农机株式会社于1991年合作研究了黄瓜收获机器人,这款机器人的研发是农机农艺相融合的成果。
首先,为使机器人容易进行收获作业,改进了黄瓜的栽培方式——将传统的栽培方式倾斜化,用支柱等支撑茎叶,只让果实露在棚架的下方,达到果实和茎叶分开的目的,以利于黄瓜的采摘。
这台机器人由可进行果实识别和位置检出的视觉传感器、七自由度极坐标型机械臂、可夹持果实并检出和剪断果梗的末端执行器以及移动机构构成。
1.1.3柑橘类收获机器人1)日本久保田株式会社于1988年试验、开发了柑橘收获机器人。
该机器人机械臂为三自由度垂直多关节型,小臂和大臂长度相等,肘和腕关节的速比为2∶1。
末端执行器可以沿直线运动,使机械臂不会像一般极坐标型关节一样伸向背后,从而避免了与背后的果树发生干扰。
机器工作时,频闪光源发光,末端执行器内部的摄像机随即开始采集图像,检测出果实。
机械臂靠近目标果实并用吸盘将目标果实吸入梳状罩,使其和其他果实分开,最后由锥形切刀将果梗切断。
2)美国的佛罗里达大学于1990年开发了橙子收获机器人。
这种橙子收获机器人拥有可实现左右上下和直线运动的三自由度极坐标型液压驱动以及七自由度的机械臂。
当末端执行器内置的光源、彩色摄像机检出果实之后,末端执行器就移向果实,末端执行器内置的超声波传感器检测出距离,半圆形环切刀便旋转切断果梗收获橙子。
采摘机器人机械手结构设计与分析一、本文概述1、采摘机器人的研究背景和意义随着农业技术的快速发展和人口老龄化的加剧,传统的人工采摘方式已经难以满足现代农业生产的需求。
采摘机器人作为一种新型的农业机械设备,具有高效、精准、省时省力等优点,正逐渐成为农业领域的研究热点。
采摘机器人的研究和应用,不仅可以提高农作物的采摘效率和质量,降低人工成本,还可以改善农民的工作环境和条件,推动农业现代化的进程。
机械手作为采摘机器人的核心部件,其结构设计直接影响到采摘机器人的性能和稳定性。
因此,对采摘机器人机械手结构的设计与分析显得尤为重要。
通过对采摘机器人机械手结构的研究,可以深入了解其运动特性、受力情况和优化方案,从而提高采摘机器人的采摘效率和准确性,推动采摘机器人在农业生产中的广泛应用。
这也为农业机械化、智能化和自动化的发展提供了重要的技术支撑和理论基础。
研究采摘机器人机械手结构设计与分析具有重要的理论意义和实践价值,对于推动农业现代化和提高农业生产效益具有重要意义。
2、机械手在采摘机器人中的重要作用在采摘机器人中,机械手的作用至关重要。
作为采摘机器人的核心部件之一,机械手负责直接与目标农作物进行交互,完成识别、抓取、剪切和放置等一系列复杂动作。
这些动作的成功执行,直接决定了采摘机器人的工作效率、采摘质量和适应性。
机械手的设计直接决定了采摘机器人的工作能力。
通过合理的结构设计,机械手可以适应不同形状、大小和成熟度的农作物,实现精准、高效的采摘。
机械手的运动轨迹和速度控制也是影响采摘效率的关键因素。
因此,对机械手的精确控制是实现高效采摘的关键。
机械手的性能直接影响到采摘机器人的采摘质量。
在采摘过程中,机械手需要保持稳定的抓取力度,避免对农作物造成损伤。
同时,机械手还需要具备足够的灵活性和精度,以确保能够准确地将农作物采摘下来。
这些要求都对机械手的设计和制造提出了极高的挑战。
机械手的适应性也是采摘机器人性能的重要评价指标。
一种水果采摘机器人末端执行器一种水果采摘机器人的末端执行器随着科技的不断进步,机器人技术正在越来越广泛地应用于各种领域。
其中,水果采摘领域也不例外。
水果采摘机器人的末端执行器是实现采摘水果的关键部分,它能够通过精确的操作,快速、高效地完成水果采摘任务。
一、末端执行器的设计水果采摘机器人的末端执行器一般采用机械手或机器人手臂的设计。
它通常由多个关节组成,具有高度的灵活性和操作性。
末端执行器可以通过感应器来感知水果的位置和形状,并通过复杂的算法来确定最佳的采摘路径。
二、末端执行器的操作流程1、感应水果:末端执行器使用感应器来探测水果的位置和形状。
这些感应器可以是光学相机、红外相机或深度相机等。
通过对采集到的图像进行处理和分析,可以确定水果的精确位置和大小。
2、路径规划:一旦确定了水果的位置,末端执行器将通过复杂的算法计算出最佳的采摘路径。
这些算法通常考虑多种因素,如机械手的灵活性、水果的位置和形状等。
3、采摘水果:在规划好路径后,末端执行器将开始执行采摘操作。
它可以使用夹持器或剪刀等工具来抓住或切断水果的茎干。
在采摘过程中,末端执行器需要保证水果不受损伤,同时也要保证机械手的操作安全。
4、放置水果:一旦采摘完成,末端执行器将把水果放置到指定的位置。
这个位置可以是篮子、箱子或其他容器。
放置过程中,末端执行器需要保证水果的稳定性和整齐性,以便后续的处理和运输。
三、末端执行器的优势1、高效性:末端执行器可以快速、准确地完成采摘任务,大大提高了采摘效率。
2、准确性:通过感应器和算法的配合,末端执行器可以精确地定位水果的位置和形状,从而保证采摘的准确性。
水果采摘机器人末端执行器的研究进展随着现代农业技术的不断发展,自动化和机器人技术在农业生产中的应用越来越广泛。
其中,水果采摘机器人在提高生产效率、降低劳动成本、提升水果质量等方面具有明显优势。
然而,采摘水果的精度和效率在很大程度上取决于机器人末端执行器的设计和功能。
蔬果采摘机器人的研究进展与展望随着全球人口的增长和营养素需求的增加,农业生产的规模和效率成为重要的问题。
在传统的农业生产过程中,蔬果采摘是一个人工劳动密集的环节,需要大量的人力资源和时间。
为了提高农业生产效率和减轻人力负担,蔬果采摘机器人成为了一个备受关注的研究领域。
本文将就蔬果采摘机器人的研究进展和展望进行论述。
1. 研究现状目前,蔬果采摘机器人的研究日益进展,研究内容包括机器人的设计和控制方法。
设计方面,采用机器视觉和智能算法来指导机器人的动作,使得机器人能够识别目标对象和进行自主移动。
控制方面,主要是通过传感器和执行器来实现机器人的操作,并且配备了控制系统来监测机器人的运行状态和调节机器人的行为。
在机器人的设计中,机器人的形状和结构根据目标种类的不同而有所不同,例如森林生长在土壤中的蔬菜采收机器人更具有穴居虫的形状,蔬菜的枝段收割机器人的形状则稍微弯曲,以适应蔬菜底部和的生长环境。
在机器人控制方面,对比机电传动和液压驱动,由于空气动力学的优越性和绿色环保的考虑,电动化已经成为非常流行的选择。
传感器方面,蔬果采摘机器人配备的传感器主要包括相机、雷达和超声波传感器等,可以提供足够的环境感知,使得机器人能在不同种类蔬果的环境下进行高效采摘。
此外,一个完整的采摘过程,机器人在触摸目标作物时,应同时计算出环境中其他植物利用立体视觉技术将其识别出来,以避免机器人伤害到不成熟的作物。
目前,蔬果采摘机器人具备高速度和精准性,能够快速地对任何大小和类型的蔬果进行采摘工作。
与传统的人工采摘相比,机器人能够实现快速、准确的采摘,提高了农产品质量和生产效率。
机器人在农业生产中的应用,也是社会和环境可持续发展的一个重要体现。
2. 展望未来虽然目前蔬果采摘机器人取得了一定的成果,但它依然存在一些挑战和困难。
其一是机器人的效率问题。
机器人处理速度还不够快,容易出现执行器动作不够精确、指向不准确等问题,导致采摘效果较差。
《采摘机器人末端执行器设计与抓取特性研究》一、引言随着科技的进步和农业现代化的推进,采摘机器人成为了提高农业生产效率和减少人工成本的重要工具。
而末端执行器作为采摘机器人的核心部分,其设计和抓取特性直接影响着机器人的工作效率和准确性。
因此,对采摘机器人末端执行器设计与抓取特性的研究具有重要的现实意义。
二、采摘机器人末端执行器设计1. 设计要求与目标采摘机器人末端执行器设计需满足以下要求:适应不同形状和大小的果实,确保抓取的稳定性和准确性,同时要保证轻便、耐用和低能耗。
设计目标是通过精确的机械结构和智能控制系统,实现自动化、高效化的果实采摘。
2. 结构设计末端执行器主要由夹持机构、驱动机构和控制机构三部分组成。
夹持机构负责与果实接触并实现夹持动作,驱动机构提供夹持动作的动力,控制机构则负责整个执行器的控制与协调。
其中,夹持机构的设计是关键,需根据果实的形状和大小进行定制化设计。
3. 材料选择执行器的材料选择需考虑其强度、耐磨性、耐腐蚀性以及轻量化等因素。
常用的材料包括高强度合金、工程塑料等。
此外,为保证执行器的耐用性,还需对关键部件进行表面处理,如喷涂防腐漆等。
三、抓取特性研究1. 抓取稳定性研究抓取稳定性是评价末端执行器性能的重要指标。
通过优化夹持机构的结构和材料,以及合理设置夹持力的大小和方向,可提高抓取的稳定性。
此外,还可通过引入视觉系统和力觉传感器,实现精确的定位和力控制,进一步提高抓取的稳定性。
2. 抓取速度与效率研究为提高采摘机器人的工作效率,需对末端执行器的抓取速度与效率进行研究。
通过优化驱动机构的传动方式和控制策略,可实现更快的夹持动作和更高的工作效率。
同时,结合智能控制算法,可实现多任务并行处理和优化调度,进一步提高机器人的工作效率。
四、实验与分析为验证设计的合理性和抓取特性的有效性,我们进行了大量的实验和分析。
实验结果表明,优化后的末端执行器能够适应不同形状和大小的果实,具有较高的抓取稳定性和工作效率。
农业作为我国重要的经济产业支柱,其发展的道路上存在着众多的问题。
在城镇化不断推进和人口老龄化现象日益严重以及大量青年人外出务工等的驱动下,农村严重缺乏生产劳动力,而缺乏生产劳动力是农业发展面临的主要问题之一[1]。
目前,我国果蔬等农作物采摘方式以人工采摘方式为主,由于劳动力的不足,大量的人工成本严重影响了果蔬生产效益。
因此,随着国家的发展,农业的发展逐渐从传统农业向智能化、智慧化农业发展,因而在农业生产中普及智能化设备、降低成本、提高工作效率,将成为未来农业发展的必然趋势,研发制造适用于果蔬等农作物采摘的机器人,代替人工进行农业生产,对于推进农业智能化和现代化进程具有重要意义[2]。
1果蔬采摘机器人的作业特性分析
1.1采摘对象多样化,生长环境差异化
果蔬的种类繁多,其大小、形状、颜色、重量以及坚硬度都有很大的差别,对于坚硬度不高的果蔬采摘时容易造成损坏,所以在作业时,采摘机器人需要根据果蔬的大小去调整末端执行器以及控制抓取力度。
由于果蔬的生长受到环境因素的影响很大,而环境也存在着很大的差异性,所以采摘机器人的采摘作业环境也就大不相同,进而对其提出了更高的要求。
Hans Journal of Agricultural Sciences 农业科学, 2021, 11(2), 129-132Published Online February 2021 in Hans. /journal/hjashttps:///10.12677/hjas.2021.112018水果采摘机器人采摘装置机研究现状刘袁,黄彪,陈昌银,杨文达,张华东,杨涛贵州理工学院,贵州贵阳收稿日期:2021年1月22日;录用日期:2021年2月17日;发布日期:2021年2月24日摘要采摘装置是水果采摘机器人的关键组成部分,与果实直接接触,在很大的程度上影响着果实的采摘率和损坏率。
随着科技的高速发展,我国研究出很多种类型的水果采摘装置,并且也得到了大众的认可。
下面我们将抽取不同的水果采摘装置进行比较,总结水果采摘机器人采集装置现存的主要问题及未来的发展趋势。
关键词水果采摘,末端执行器,研究进展,发展趋势Research Status of Fruit Picking RobotPicking DeviceYuan Liu, Biao Huang, Changyin Chen, Wenda Yang, Huadong Zhang, Tao YangGuizhou Institute of Technology, Guiyang GuizhouReceived: Jan. 22nd, 2021; accepted: Feb. 17th, 2021; published: Feb. 24th, 2021AbstractThe picking device is the key component of the fruit picking robot. It directly contacts with the fruit, which affects the picking rate and damage rate of the fruit to a great extent. With the rapid development of science and technology, many types of fruit picking devices have been developed in China, and have been recognized by the public. Next, we will extract different fruit picking de-vices for comparison, and summarize the main existing problems and future development trend of fruit picking robot collecting devices.刘袁等KeywordsFruit Picking, End-Effector, Research Progress, the Development TrendCopyright © 2021 by author(s) and Hans Publishers Inc.This work is licensed under the Creative Commons Attribution International License (CC BY 4.0)./licenses/by/4.0/1. 引言根据《2020-2026年中国水果行业市场运营格局及投资策略探讨报告》发布数据显示:2018年我国水果产量达2.57亿吨,稳居全球第一。
《智能移动式水果采摘机器人系统的研究》篇一一、引言随着现代农业的不断发展,高效、快速和自动化的果实采摘方式成为当下农业生产中急需解决的问题。
在许多农产区,特别是在果树种植区域,劳动力短缺、成本高昂以及传统采摘方式效率低下等问题严重制约了农业的可持续发展。
因此,研究并开发智能移动式水果采摘机器人系统,对于提高果实采摘效率、降低人工成本、促进农业现代化具有重要意义。
本文旨在探讨智能移动式水果采摘机器人系统的研究现状、技术原理、应用前景及未来发展趋势。
二、研究现状当前,国内外众多科研机构和企业对智能移动式水果采摘机器人系统进行了深入研究。
在技术层面,主要涉及到机器人运动控制技术、图像识别与处理技术、机器学习与人工智能技术等。
在研究过程中,这些技术共同作用,使采摘机器人能够在果园环境中自主导航、定位果实并进行精确采摘。
三、技术原理智能移动式水果采摘机器人系统的技术原理主要包括以下方面:1. 机器人运动控制技术:通过控制算法和传感器,使机器人能够在果园环境中自主移动和定位,以适应不同的地形和果树分布。
2. 图像识别与处理技术:利用计算机视觉技术,对果实进行识别和定位,实现精确采摘。
3. 机器学习与人工智能技术:通过训练模型,使机器人具备自主学习和适应能力,能够根据不同种类和成熟度的果实进行采摘。
四、应用前景智能移动式水果采摘机器人系统的应用前景广阔。
首先,它可以大幅提高果实采摘效率,降低人工成本,解决劳动力短缺问题。
其次,机器人可以适应各种复杂环境,减少对环境的破坏和污染。
此外,智能采摘机器人还可以根据果实的成熟度和品质进行筛选,提高果实的产量和质量。
在农业现代化的进程中,智能移动式水果采摘机器人系统将成为农业生产的重要工具。
五、未来发展趋势未来,智能移动式水果采摘机器人系统将朝着以下方向发展:1. 更加智能化:随着人工智能技术的不断发展,采摘机器人将具备更强的自主学习和适应能力,能够适应更多种类的果实和复杂的果园环境。
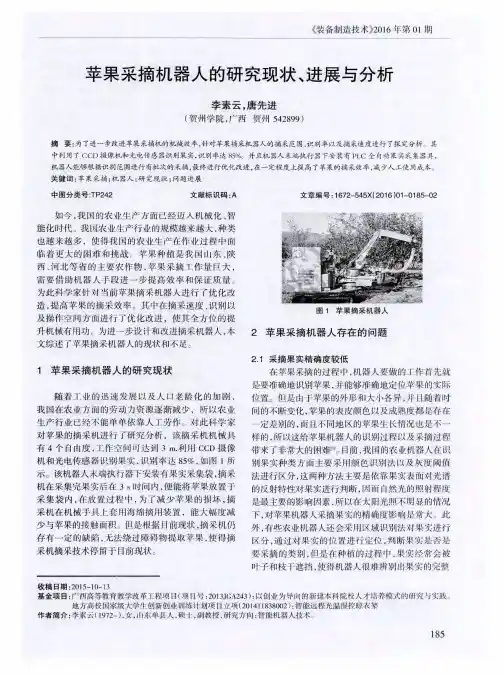
果蔬采摘机器⼈末端执⾏器的结构组成现状分析采摘机机器末端执⾏器研究现状分析末端执⾏器是果蔬采摘机器⼈的另⼀重要部件,它的设计通常被认为是机器⼈的核⼼技术之⼀。
⼀般果蔬的外表⽐较脆弱,它的形状及⽣长状况通常复杂。
在机器⼈采摘过程中果蔬外表发⽣损伤的原因主要有:①果蔬位置识别或机械臂控制规划有误,导致末端执⾏器划伤或刺伤果蔬外表;②末端执⾏器夹持或抓取⼒过⼤,压伤果蔬外表;③末端执⾏器抓持不稳定导致果蔬掉落,与地⾯或其他坚硬物体接触⽽碰上外表。
作为采摘机器⼈的执⾏装置,末端执⾏器应根据不同果蔬果实的⽣物、机械特性及栽培⽅式,采取不同的专⽤机构以提⾼采摘的成功率并减⼩对果蔬的损伤为主要⽬标。
⼀般集成两项功能:①检测果实的位姿,为执⾏机构提供导航信息;②以适当⼒度夹持果实或果梗并剪切果柄,完成采摘动作。
在动作上通常包括获取果实和果实与植株分离两部分。
为了安全与⾼效的完成采摘动作,末端执⾏器还可能加⼊吸盘、推杆等附加机构以及各类传感器以完成准确采摘并减⼩损伤。
1.获取⽅式获取和分离果实是采摘机器⼈末端执⾏器必须实现的两⼤关键动作,即⾸先通过抓取、吸⼊、勾取等⼀定⽅式获取果实,再通过扭断、剪切等不同⽅法完成果实与果梗的分离。
从⽬前发表的⽂献来看,获取果实的⽅式主要归为⾮夹持类和夹持类两种。
分离果实与果梗的⽅式有传统的扭断、折断、拉断以及通过剪⼑或切⼑进⾏切断,还有新式的热切割⽅法等。
1.1.直接切断式这类末端执⾏器⼀般都是直接剪断果梗,由于其本⾝不能实现果实的回收,因此剪掉的果实直接落地或者落⼊事先放置的果箱中。
例如,⽇本开发的甜椒采摘机器⼈末端执⾏器、茄⼦采摘末端执⾏器、番茄采摘末端执⾏器、美国柑橘采摘末端执⾏器均为此类结构,如下图所⽰。
1甜椒采摘末端执⾏器2茄⼦采摘末端执⾏器3番茄采摘末端执⾏器这类末端执⾏器的结构更能较为简单,适⽤于植株冠层内枝叶较稀疏,且果实具有⼀定抗冲击能⼒的果蔬。
对于果梗较短的植株,往往造成⽆法剪切或碰上果实的现象,对于冠层空间⽐较复杂的植株,果实下落过程中很容易被碰上,并且下落的位置也不定,影响果实的回收。
果蔬采摘机器人的研究现状及发展方向随着现代科学技术的发展,人类正在朝着一个机械智能化时代迈进。
越来越多的行业开始导入智能化、自动化的机器,而对于劳动力输入最多的农业自是不甘落后的,早早的将机械利用其中。
为解决农业采摘中的实际问题,果蔬采摘机器人的研究与应用成为一种迫切需要。
综述了国内外果蔬采摘机器人的研究进展与现状,通过分析这些采摘机器人,并在此基础上重点分析了果蔬采摘机器人研究中存在的问题,提出了未来研究开发的技术关键与方向,同时也指明了采摘机器人未来的研究方向。
标签:果蔬采摘;机械手;自动化;研究现状引言随着电子计算机和自动控制技术的迅速发展、农业高新科技的应用和推广,农业机器人已逐步进入到农业生产领域中,并将促进现代农业向着装备机械化、生产智能化的方向发展。
【1】果蔬采摘是农业生产中季节性强、劳动强度大、作业要求高的一个重要环节,研究和开发果蔬采摘的智能机器人技术对于解放劳动力、提高劳动生产效率、降低生产成本、保证新鲜果蔬的品质,以及满足作物生长的实时性要求等方面都有着重要的意义。
果蔬采摘机器人的研究现状:国际上,一些以日本和美国为代表的发达国家,已经从20世纪80年代开始研究采摘机器人,并取得了一些成果。
而我国直到20 世纪90 年代,中国才开始研究果蔬采摘机器人,而且相对于其他发达国家,中国的研究工作具有起步晚,发展慢,投资少的特点。
哪怕在改革开放之后,我国加大对于这个方面的研究,但是所取得效果仍旧不明显,使得果蔬采摘自动化技术长期处于基础研发的阶段。
我国对采摘机器人的研究始于20世纪90年代中期,虽然与发达国家还有很大的差距,但是在不少院校和研究学者的努力下也取得了一些进展【2】。
中国农业大学的汤修映等人研制了一个6自由度黄瓜采摘机器人,该机器人基于RGB三基色模型的G分量【3】来进行图像分割,在特征提取后确定黄瓜的采摘点。
同时提出了新的适合自动化采摘的斜栅网架式黄瓜栽培模式。
孙明等为苹果采摘机器人开发了一套果实识别视觉系统,并研究成功了一种使二值图像的像素分割正确率大于80%的彩色图像处理技术。
采摘机机器末端执行器研究现状分析末端执行器是果蔬采摘机器人的另一重要部件,它的设计通常被认为是机器人的核心技术之一。
一般果蔬的外表比较脆弱,它的形状及生长状况通常复杂。
在机器人采摘过程中果蔬外表发生损伤的原因主要有:①果蔬位置识别或机械臂控制规划有误,导致末端执行器划伤或刺伤果蔬外表;②末端执行器夹持或抓取力过大,压伤果蔬外表;③末端执行器抓持不稳定导致果蔬掉落,与地面或其他坚硬物体接触而碰上外表。
作为采摘机器人的执行装置,末端执行器应根据不同果蔬果实的生物、机械特性及栽培方式,采取不同的专用机构以提高采摘的成功率并减小对果蔬的损伤为主要目标。
一般集成两项功能:①检测果实的位姿,为执行机构提供导航信息;②以适当力度夹持果实或果梗并剪切果柄,完成采摘动作。
在动作上通常包括获取果实和果实与植株分离两部分。
为了安全与高效的完成采摘动作,末端执行器还可能加入吸盘、推杆等附加机构以及各类传感器以完成准确采摘并减小损伤。
1.获取方式获取和分离果实是采摘机器人末端执行器必须实现的两大关键动作,即首先通过抓取、吸入、勾取等一定方式获取果实,再通过扭断、剪切等不同方法完成果实与果梗的分离。
从目前发表的文献来看,获取果实的方式主要归为非夹持类和夹持类两种。
分离果实与果梗的方式有传统的扭断、折断、拉断以及通过剪刀或切刀进行切断,还有新式的热切割方法等。
1.1.直接切断式这类末端执行器一般都是直接剪断果梗,由于其本身不能实现果实的回收,因此剪掉的果实直接落地或者落入事先放置的果箱中。
例如,日本开发的甜椒采摘机器人末端执行器、茄子采摘末端执行器、番茄采摘末端执行器、美国柑橘采摘末端执行器均为此类结构,如下图所示。
1甜椒采摘末端执行器2茄子采摘末端执行器3番茄采摘末端执行器这类末端执行器的结构更能较为简单,适用于植株冠层内枝叶较稀疏,且果实具有一定抗冲击能力的果蔬。
对于果梗较短的植株,往往造成无法剪切或碰上果实的现象,对于冠层空间比较复杂的植株,果实下落过程中很容易被碰上,并且下落的位置也不定,影响果实的回收。
1.2 吸入式这类非夹持类末端执行器主要是通过真空系统将果实吸入末端执行器内,再通过切断、扭断等方式分离果实和果梗。
如图4所示的柑橘采摘末端执行器结构图,由真空吸盘先吸持住果实向后拉动,同时末端执行器的弹性盖板向前移动,使果实进入笼体内,然后盖板收缩进而保住果实,随后一对割刀合拢切断果梗。
4 柑橘采摘末端执行器如图5(a)所示比利时开发的苹果采摘机器人末端执行器,设计成漏斗的形状,漏斗内安置摄像机,当有果实进入手爪范围的时候,真空吸引器打开将果实吸入,再通过旋转扭断果梗将果实采摘下来。
图5(b)所示英国开发的苹果采摘机器人末端执行器,由一截管道、两个内置圆环和两个弹簧盖组成,该末端执行器获取果实的原理也是吸入+扭断式,当苹果的位置信息传来之后,真空系统将果实吸入,再扭断果梗采摘下苹果。
(a)(b)图5 苹果采摘末端执行器还有吸入+勾取的方式来获取果实等等。
吸入式的末端执行器硬件设计简单,工作原理类似,对于果实娇嫩、果梗柔弱细长的草莓等果实,采取吸入加勾取比夹持的获取方式更可行,但这类末端执行器对果实个体尺寸差异适应能力较差动作速度较慢,稳定性不高,而且相邻的未成熟的果实也容易被一同吸入和采摘下来。
1.3 夹持类这类末端执行器其夹持器通常由带有真空吸引器和数目不等的手指构成。
按手爪的个数可分为两指和多指型,目前大多数果蔬采摘机器人末端执行器为两指,也有一些三指和四指的末端执行器,用于外形不规则或较大的果实。
因此,一般情况下,对于形状较为规格,尺寸和质量部太大的果实,应首选较少手指进行抓持。
1.3.1 两指夹持如图6所示,日本东京大学乔俊(Jun Qiao)等人开发设计的甜椒采摘机器人末端执行器,该末端执行器具有两个瘦长形的手指,长度为160mm,厚度和宽度分别只有1mm和10mm。
两个手指组成的手爪抓住果柄的过程由依靠一个凸轮的瞬时针旋转运动进行张开和夹紧动作,凸轮的旋转运动由一个步进电机进行驱动,凸轮为椭圆形,旋转90度后手爪就完成一次张开或夹紧的过程。
图6 日本的甜椒采摘机器人末端执行器.中国农业大学张凯良等人设计了草莓采摘机器人,其机械原理如图7所示,该末端执行器的夹持机构主要有机械爪及其附属部件构成。
丝杠与内螺纹管通过螺纹连接,由电机带动丝杠旋转,从而螺纹管进行前后运动,进而带动两根手指做闭合或张开动作,完成对果实的获取。
在两手指的内侧上装有橡胶垫,增加了缓冲,可使末端执行器更可靠地夹持,同时,在靠近手指根部的位置安装了一对间距可调的机械触点,作为机械爪夹持力度的反馈装置。
可见,该末端执行器的夹持装置获取果实的精确性、可靠性以及对果实的保护程度明显要好于日本的甜椒采摘机器人末端执行器。
1.手指2.内螺纹管3.丝杠4.电机图7 机械爪机构示意图刘继展等研制了番茄采摘机器人末端执行器(图8),由于番茄的成串生长增加了真空吸盘装置,避免了采摘时将相邻的未成熟果实一同夹持。
真空吸盘装置由真空发生设备、真空检测控制元件、吸盘和连接附件组成。
采用小型压缩气罐为气源,采用适应曲面及不平整工件、具有良好缓冲性能的真空波纹吸盘由真空软管、接头等附件连接组成末端执行器的真空系统。
真空波纹吸盘固定于齿轮的前端,通过齿轮齿条传动带动吸盘前进和后退,并与真空系统相配合,完成吸住并拉动果实的任务。
采用两指夹持机构,如图9所示,手指指面设计成圆弧并贴有5mm厚的橡胶,增强了夹持的可靠性。
手指夹持机构由直流伺服电机驱动,通过锥齿轮的传动,带动具有左旋和右旋两段螺纹的双向螺杆传动,使与之组成螺旋副的两手指产生平行相对运动,从而合拢或松开,完成对番茄果实的夹持。
1.手指2.真空波纹吸盘3.双向螺杆4、8、11.直流伺服电动机5.激光聚焦透镜6.齿条7.外壳9、10.锥齿轮12.齿轮图8 番茄采摘机器人末端执行器主体结构示意图图9 手指尺寸及吸盘行程马履中等研制的苹果采摘机器人末端执行器的夹持机构如图10所示,气缸的活塞杆通过销轴与两手指后端滑槽的高副连接,最终把导杆的直线运动转化成两手指绕转轴的摆动,从而组成滑槽导杆机构,实现对果实的夹持。
手指圆弧面内侧设计覆盖了海绵橡胶层,这样可以保证在抓取过程中抓取力分布均匀,增大手指与苹果的摩擦力,可以减少夹持时对苹果的损伤,但海绵弹性系数过小,受很小的力就会产生过大的压缩变形,不能起到很好保护果实的作用。
1.薄型气缸2.支架3.活塞杆4.导杆5.销轴6.转轴7.手指8.海绵材料9.橡胶材料10.滑槽图10 苹果采摘机器人末端执行器夹持机构结构示意图1.3.2 多指夹持类手指的数目越少,夹持的稳定性越差,多指的末端执行器虽然夹持更为稳定可靠,但机构和控制的复杂性大大增加,同时在采摘过程中与果梗、枝叶的干涉现象也会随之增多。
如图11所示的茄子采摘机器人末端执行器抓取机构简图,该抓取机构由4根夹持手指(直径4mm的钢丝,可以形变,手指外包有1cm厚的海绵)、2个滑轨(每个滑轨的一端固定在机械手本体上,另一端固定在夹持手指上)和双向丝杠(带螺母,每个螺母分别与夹持手指固定)组成。
4根夹持手指两两相对(图中仅能看到两个),左面的两个连在同一滑轨上,并与双向丝杆的左螺母固定;右面的两个连在同一滑轨上,并与双向丝杆的右螺母固定。
通过电机带动双向丝杠,使左右两个滑轨相向而行。
蜗轮蜗杆的传动比是1:10,电机正向转动时,双向丝杠的两个螺母沿相向方向运动,运动速度为电机的1/10。
当螺母运动到定位果实的位置时,完成夹持动作。
而且,双向丝杠的中间部分无螺纹结构,于是,夹持手指的预紧力可以夹持到设定的最小的茄子果实,以后丝杠转动而螺母原地不动;当两个螺母在连在其之间的回位弹簧张力的作用下,螺母向相反的方向运动随双向丝杠的转动,螺母重新回到丝杠的螺纹上,沿着螺纹向两边运动,从而完成松开夹持的果实的动作。
该末端执行器收获茄子的范围仅是3~6.5cm,作业时很容易造成遗漏掉果实,当松开夹持的果实时,回位弹簧降低了执行器的整体稳定。
1.滑轨2.夹持手指3.丝杠上的螺母4.末端执行器外壁5.双向丝杠6.蜗杆7.蜗轮8.电机轴9.回位弹簧图11 末端执行器抓取机构简图居洪玲、姬长英设计了一种多用途的末端执行器(图12),不仅能收获苹果和梨,其他生长类似的果实也可以一同收获。
含有三个机械爪,如图13所示。
此末端执行器的抓取机构主要由3个机械爪(宽25mm,长75mm的钢板,外包有弹性材料)、直线滑轨和止动块组成。
电机反转带动齿轮转动,齿轮带动齿条,将转动化为平动,进而通过连接杆带动机械爪向里运动,实现对果实的抓取采摘。
水果的直径是20~90mm。
3个机械爪分布在3600的圆周上,用螺丝与连接杆固定在一起,连接杆安装在齿条上,齿条安装在直线滑轨上。
滑轨两侧用止动块限制运动界限,从而控制手爪的抓取范围。
弹性材料的变形适应能力,可以避免快速抓取带来的损害,还能依据果实的外形包裹果实,防止果实脱落。
1.机械爪2 弹性材料3 传感器4 上护盖5 齿条6 止动块7直线滑轨8 支撑套9 定外环10 电磁离合器11 联轴器12 座架14 电机15电磁离合器16 转盘17 垫脚18 连接杆19 齿轮20 传动轴图12 末端执行器的整体结构1.机械爪2.弹性材料硅胶3.连接杆4.止动块5.滑轨6.转盘.7.齿条8.齿轮图13 末端执行器的抓取机构美国研制了研究员提出了一种西红柿采摘机器人,该机器人末端执行器采用了真空吸盘+四指机械爪,真空吸盘本身具备抓取功能,四个夹持手指对称分布,使用塑料质地代替尼龙材料,减小了夹持时的侧向运动,通过线缆连接起来共同驱动,可以更稳定的抓持住果实。
如图14所示,这种柔性手指弯曲曲线平滑,具有一定的补偿能力,能够很好适应果实的大小差异。
但该柔性手指由一个动力驱动4个手指的所有关节,属于高度欠驱动机构,当遇到枝叶稠密等障碍物时,手指容易发生弯曲,易造成果实抓取的失败。
图14 美国的西红柿采摘机器人末端执行器2.分离方式无论夹持类和非夹持类采摘机器人末端执行器,都需要通过一定的方式完成果梗的切断或果梗与果实的分离,才能最终实现采摘果实。
现有的采摘机器人末端执行器研究成果来看,多采用扭断、折断或剪切的分离方式,一些末端执行器对新的切割原理进行了尝试。
2.1 扭断、折断、拉断扭断是利用手腕的旋转和周转关节在执行器抓牢果实后拧断果柄,需要多次往复扭转才能断开果梗,末端执行器需要较大的工作空间,这样就难于避障。
这种方式对于果柄易断的果蔬较为实用,如番茄的采摘,但对于果柄柔韧性较高的果蔬则采摘成功率较低。
而且无论扭断、折断或拉断都只适用于果实被充分夹持的情况下,其优点是无需再附加另外的分离装置和动力,但这就要求末端执行器的夹持机构夹持果实要足够可靠,对果实提供充分的作用力,又不能造成对果实的损伤,这样夹持器对果实的夹持力要有较高的控制。