利用Hopfield神经网络求解旅行商问题研究
- 格式:pdf
- 大小:1.02 MB
- 文档页数:4
Hopfield神经网络在TSP问题中的应用的开题报告1.研究背景旅行商问题(TSP)是运筹学中的经典问题,它是要找到一条经过所有城市(节点)的路径,使得路径经过的距离最短。
由于该问题是NP难问题,因此解决TSP问题一直是一个热门研究领域。
Hopfield神经网络作为一种反向传播神经网络模型,已经在很多问题中得到了应用,包括TSP问题。
Hopfield神经网络可以使用能量函数描述问题,利用机器学习技术学习问题的解,自适应地调整神经元之间的连接权值,从而达到解决TSP问题的目的。
2.研究意义研究Hopfield神经网络在TSP问题中的应用,可以为人们提供一种新的解决TSP 问题的方法。
Hopfield神经网络的优点是可以处理非线性问题,因此在解决TSP问题这种复杂的非线性问题时非常有效。
通过研究Hopfield神经网络在TSP问题中的应用,可以提高解决TSP问题的效率和精度,为一些实际问题提供有效的解决方案。
同时,这种研究也会推动神经网络领域的发展。
3.研究目标本研究的目标是探讨Hopfield神经网络在TSP问题中的应用,并提出一种有效的Hopfield神经网络解决TSP问题的方法。
具体目标如下:(1)研究Hopfield神经网络原理,并深入了解其在TSP问题中的特点和应用。
(2)分析TSP问题的性质和解决方法,并与Hopfield神经网络相结合,提出一种有效的解决方案。
(3)设计和实现算法,并对算法进行测试和优化。
(4)使用实验数据对算法进行验证和评估,分析算法的优缺点和适用范围。
4.研究方法本研究将采用以下几种方法:(1)文献调研法:通过查阅相关文献,研究Hopfield神经网络在TSP问题中的应用,并了解近年来该领域的研究进展。
(2)模型建立法:根据TSP问题的相关性质,结合Hopfield神经网络的原理,提出一种新的解决方案。
(3)实验方法:通过编写代码实现算法,并使用TSP问题数据进行测试和验证,对算法效率和精度进行评估,并进行优化。
旅行商问题(TravelingSalesmanProblem,简称TSP)是一个著名的组合优化问题:给定n个城市,有一个旅行商从某一城市出发,访问每个城市各一次后再回到原出发城市,要求找出的巡回路径最短。
如果用图论来描述,那就是已知带权图G=(C,L),寻出总权值最小的Hamilton圈。
其中C={c1,c2,…,cn}表示n个城市的集合,L={lij|ci,cj∈C}是集合C中元素(城市)两两连接的集合,每一条边lij,都存在与之对应的权值dij,实际应用中dij可以表示距离、费用、时间、油量等。
TSP的描述虽然简单,解决起来却很困难。
最简单思路是用穷举法把所有可能的巡回路径全部列出来,最短的一个就是最优解,但这样只能处理很小规模的问题。
旅行商问题属于NP-complete问题,是NP(non-deterministicpoly-nominal)问题中最难的一类,不能在多项式时间内求解。
如果有n座城市,那么巡游路径共有(n-1)!/2条,计算的时间和(n-1)!成正比。
当城市数n=20,巡回路径有1.2×1018种,n=100,巡回路径就有多达4.6×10155种,而据估计宇宙中基本粒子数“仅仅只有”1087个。
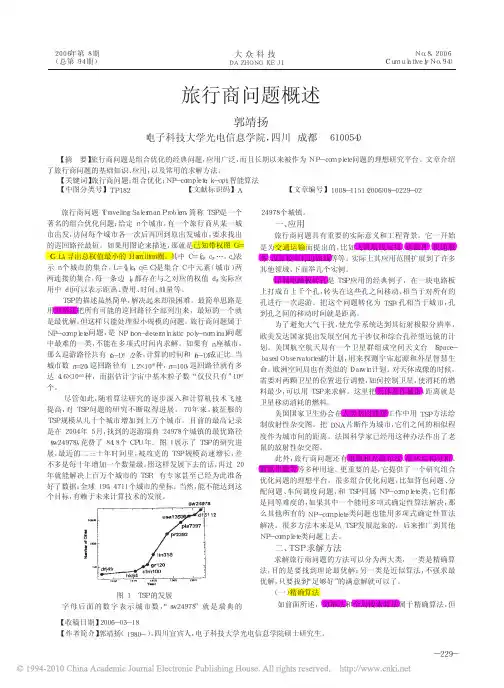
尽管如此,随着算法研究的逐步深入和计算机技术飞速提高,对TSP问题的研究不断取得进展。
70年来,被征服的TSP规模从几十个城市增加到上万个城市。
目前的最高记录是在2004年5月,找到的巡游瑞典24978个城镇的最优路径(sw24978),花费了84.8个CPU年。
图1展示了TSP的研究进展,最近的二三十年时间里,被攻克的TSP规模高速增长,差不多是每十年增加一个数量级。
照这样发展下去的话,再过20年就能解决上百万个城市的TSP,有专家甚至已经为此准备好了数据:全球190,4711个城市的坐标。
当然,能不能达到这个目标,有赖于未来计算技术的发展。
图1TSP的发展字母后面的数字表示城市数,“sw24978”就是瑞典的24978个城镇。
3我的页脚Hopfield 网络学习及其在最优化问题中的应用金海和*(清华大学经济管理学院,北京 100084)摘要 本文针对Hopfield 神经网络(HNN )所存在的极小值问题及缺乏学习能力的问题,提出了一种学习算法。
它是将决定约束条件权值大小的系数作为学习参数,在参数空间里使参数向着HNN 能量上升最快的方向学习,使网络状态能够有效地从一旦陷入的极小值状态中逃脱出来。
该算法分别被应用于10、20城市的旅行商问题(TSP ),结果能够以很高的比率收敛于最优解。
关键词 Hopfield 神经网络 最速上升法 参数学习 最优化问题1 引言Hopfield 等通过用连续值HNN 求解TSP ,开辟了运用神经网络求解最优化问题的新途径[1]。
但存在着(1)不能学习、(2)产生大量极小值等问题。
作为解决极小值问题的方法之一,Hinton 等提出了Boltzmann 机模型及其学习算法[2],但因速度太慢,难以为现实所接受[3]。
对于问题(2),笔者进行过深入的理论分析,并在数学上进行了证明[4]。
针对问题(1)、(2),笔者提出了登山学习算法[5],但该算法中,为了避免因学习使最小值发生位移,以学习后的解为初始解,使网络回到未学习的HNN 状态空间里进行状态更新至平衡状态,显然增加了计算量。
TSP 常被用作研究最优化问题的范例[6],当运用HNN 求解时,它的解依从于决定约束条件权值大小的系数,而这类系数在选择上具有一定的自由度。
本文提出一种HNN 学习算法,思想是,将决定约束条件权值大小的系数作为学习参数,在参数空间里使学习参数向着HNN 能量上升最快的方向学习,使HNN 能从一旦陷入的极小值状态中逃脱出来,直至找到最优解或满意解。
本文将对N =10、20的TSP 进行仿真实验,以证明其有效性。
2 Hopfield 神经网络模型HNN 是由大量简单的神经处理单元相互结合而成,并有对称性,无直接自反馈,非同期动作等约束。
Hopfield神经网络求解TSP问题1.什么是TSP问题旅行商问题,即TSP问题(Traveling Salesman Problem),也是最优化问题。
一个旅行商人要拜访n个城市,他必须选择所要走的路径,路径的限制是每个城市只能拜访一次,而且最后要回到原来出发的城市。
路径的选择目标是要求得的路径路程为所有路径之中的最小值。
用数学语言描述TSP如下 :设有限个城市集合 : C = { C1 , C 2 , … , Cn },每两个城市间的距离为 d(Ci,Cj)∈Z, 其中 Ci,Cj∈C( 1<=i , j <=n), 即求 minL=∑d(Ci,Cj)的值的问题。
有效路径的方案数目为Rn=((n-1)!/2),例如:R4=3,R5=12,R6=120,R10=181440可见路径总数,随n增大而急剧增长,当城市数目增加到一定的程度,计算量增加到无法进行的地步,所以要选择一种合理快速的算法,而不能对所有情况使用人工列举的方法。
2.Hopfield神经网络介绍人工神经网络(Artificial Neural Networks,简写为ANNs)也简称为神经网络(NNs)或称作连接模型(Connection Model),它是一种模仿动物神经网络行为特征,进行分布式并行信息处理的算法数学模型。
这种网络依靠系统的复杂程度,通过调整内部大量节点之间相互连接的关系,从而达到处理信息的目的.最基础的为BP、Hopfield网络等。
Hopfield网络是一种互连型网络的一种,它引入类似于Lyapunov 函数的能量函数概念,把神经网络的拓扑结构(用连接权矩阵表示)与所求问题(用目标函数描述)相对应,并将其转换为神经网动力学系统的演化问题。
3.神经元的数学模型人的大脑是由大量神经细胞或神经元组成的。
每个神经元可以看作为一个小的处理单元,这些神经元按照某种方式相互连接起来,构成大脑内部的生理神经元网络系统,他们中各个神经元之间连接的强弱不是固定不变的,而是按照外部的信号激励程度做自适应的变化,而每个神经元又随着接收到的多个激励信号的综合大小呈现兴奋或抑制状态。
案例背景:
利用神经网络解决组合优化问题是神经网络应用的一个重要方面。
所谓组合优化问题,就是在给定约束条件下,使目标函数极小(或极大)的变量组合问题。
将Hopfield网络应用于求解组合优化问题,把目标函数转化为网络的能量函数,把问题的变量对应到网络的状态,这样,当网络的能量函数收敛于极小值时,问题的最优解也随之求出。
由于神经网络是并行计算的,其计算量不随维数的增加而发生指数性“爆炸”,因而对于优化问题的高速计算特别有效。
[ 以下有详细的Hopfield网络理论知识..........]
问题描述:
TSP问题,即所谓的旅行商问题(Traveling Salesman Problem)。
问题的提法是:在N个城市中各经历一次后回到出发点,使所经过的路程最短。
不考虑方向性和周期性,在给定N 的条件下,可能存在的闭合路径数目为1/2(N-1)!。
当N较大时,枚举法的计算量之大难以想象。
将Hopfield网络用于求解该问题,效果非常显著。
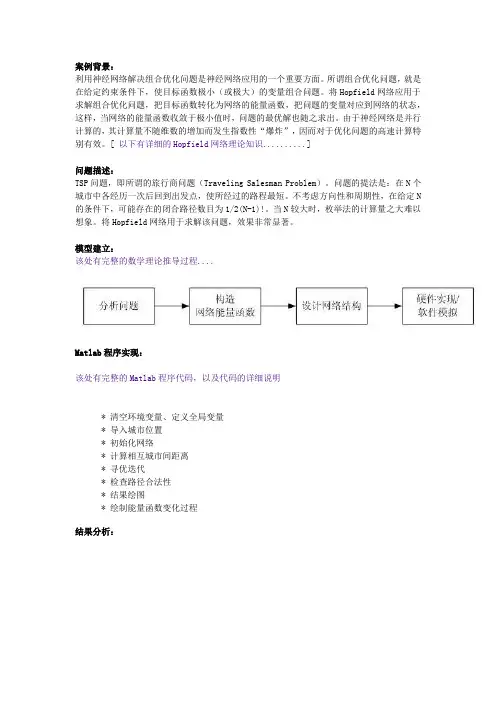
模型建立:
该处有完整的数学理论推导过程....
Matlab程序实现:
该处有完整的Matlab程序代码,以及代码的详细说明
* 清空环境变量、定义全局变量
* 导入城市位置
* 初始化网络
* 计算相互城市间距离
* 寻优迭代
* 检查路径合法性
* 结果绘图
* 绘制能量函数变化过程
结果分析:
该处有详细的运行结果。

HopField 神经网络解决旅行商问题实验名称:用Hopfield 神经网络解决旅行商(TSP)问题实验内容:旅行商问题(TravellingSalesman Problem, 简记TSP ,亦称货郎担问题):设有n 个城市和距离矩阵D=[dij],其中dij 表示城市i 到城市j 的距离,i ,j=1,2 …n ,则问题是要找出遍访每个城市恰好一次的一条回路并使其路径长度为最短。
TSP 的一个解可表述为一个循环排列,假如有5个城市ABCD E顺序为如有5个城市顺序为C→A →E→B→D→C。
那么路线总长度为:D C BD EB AE CA d d d d d d ++++=TSP 问题综合了一大类组合优化问题的典型特征,属于NP 完全问题,不能在多项式时间内进行检验。
若使用动态规划的方法时间复杂性和空间复杂性都保持为n 的指数函数。
HNN 方法是解TSP 问题的另一种有效的方法,在城市数目比较小的情况下可以在较短的时间得到满意的结果。
算法分析:所用到的基本理论与方法,具体算法。
1.根据文献(1),HNN 解TSP 问题的具体步骤为:0、置t=0,A=1.5,D=1;1、读入N 城市之间的距离),,2,1,(n y x d xy =文件;2、计算神经元之间的权重和输入偏置 权重:n j i y x Dd A A T i j xy ij xy YjXi ,2,1,,,,1,,=---=-其中δδδ输入偏置: I=2A;3、)(t U xi 的初值在0附近随机产生(x,i=1,2,……,N );4、计算))/)(tanh(1(21)(0U t U t V xi xi +=, 这里2.00=U 5、利用神经元动态方程,计算∑∑==+=∆n y nj yj yjxi xi I V Tt u 11,)(6利用一阶尤拉法计算 ,5.0)()1()1(=∆∆⨯∆++=+t t t u t U t U xi xi xi ,这里7、如果系统达到平衡状态,那么终止程序,否则返回第4步。
TSP的神经网络解法130337杨康一、问题概述1、TSP问题旅行商问题,即TSP问题(Travelling Salesman Problem)又译为旅行推销员问题、货郎担问题,是数学领域中著名问题之一。
假设有一个旅行商人要拜访n个城市,他必须选择所要走的路径,路径的限制是每个城市只能拜访一次,而且最后要回到原来出发的城市。
路径的选择目标是要求得的路径路程为所有路径之中的最小值。
2、神经网络介绍人工神经网络(Artificial Neural Networks,简写为ANNs)也简称为神经网络(NNs)或称作连接模型(Connection Model),它是一种模仿动物神经网络行为特征,进行分布式并行信息处理的算法数学模型。
这种网络依靠系统的复杂程度,通过调整内部大量节点之间相互连接的关系,从而达到处理信息的目的。
神经网络起源于上世纪四、五十年代,经历60多年的发展取得了巨大成果。
目前神经网络算法比较多,最基础的为BP、RBF、Hopfield等,基于这些算法的研究成果很多。
针对实际问题和存在缺陷,国内外很多学者提出了相关的改进方法。
本文采用Hopfield神经网络解决TSP问题。
Hopfield网络最重要的贡献就是引入了Lyapunov稳定性定理,证明了网络在任意初始状态下都能渐近稳定,从而Hopfield网络可用于优化计算。
二、解决方案根据TSP问题的基本要求,优化目标为:上式中的每一项表示城市y在城市x之前或之后被访问时,dxy就应被计入总路程,因此上式是任意一个循环旅行的总路程。
其中下标i对N 取模运算,即当i =N +1时令i=1,从而保证旅行路线上的第N个城市与第一个城市相邻。
如果把约束条件公式化,则分别为:上式可满足下列三个条件:(1)是置换矩阵在每行中只有至多一个元素的值为1,表示每城市不能最多只能访问一次;(2)置换矩阵每列至多只能有一个元素为1,即每次只能访问一个城市;(3)保证置换矩阵的每行每列均有且仅有一个元素的1。

%% 连续Hopfield神经网络的优化—旅行商问题优化计算% function main%% 清空环境变量、定义全局变量clear allclcglobal A D%% 导入城市位置load city_location%% 计算相互城市间距离distance=dist(citys,citys');%% 初始化网络N=size(citys,1);A=200;D=100;U0=0.1;step=0.0001;delta=2*rand(N,N)-1;U=U0*log(N-1)+delta;V=(1+tansig(U/U0))/2;iter_num=10000;E=zeros(1,iter_num);%% 寻优迭代for k=1:iter_num% 动态方程计算dU=diff_u(V,distance);% 输入神经元状态更新U=U+dU*step;% 输出神经元状态更新V=(1+tansig(U/U0))/2;% 能量函数计算e=energy(V,distance);E(k)=e;end%% 判断路径有效性[rows,cols]=size(V);V1=zeros(rows,cols);[V_max,V_ind]=max(V);for j=1:colsV1(V_ind(j),j)=1;endC=sum(V1,1);R=sum(V1,2);flag=isequal(C,ones(1,N)) & isequal(R',ones(1,N));%% 结果显示% 计算初始路径长度sort_rand=randperm(N);citys_rand=citys(sort_rand,:);Length_init=dist(citys_rand(1,:),citys_rand(end,:)');for i=2:size(citys_rand,1)Length_init=Length_init+dist(citys_rand(i-1,:),citys_rand(i,:)');end% 绘制初始路径figure(1)plot([citys_rand(:,1);citys_rand(1,1)],[citys_rand(:,2);citys_rand(1,2)],'o-') for i=1:length(citys)text(citys(i,1),citys(i,2),[' ' num2str(i)])endtext(citys_rand(1,1),citys_rand(1,2),[' 起点' ])text(citys_rand(end,1),citys_rand(end,2),[' 终点' ])title(['优化前路径(长度:' num2str(Length_init) ')'])axis([0 1 0 1])grid onxlabel('城市位置横坐标')ylabel('城市位置纵坐标')% 计算最优路径长度[V1_max,V1_ind]=max(V1);citys_end=citys(V1_ind,:);Length_end=dist(citys_end(1,:),citys_end(end,:)');for i=2:size(citys_end,1)Length_end=Length_end+dist(citys_end(i-1,:),citys_end(i,:)');enddisp('最优路径矩阵');V1% 绘制最优路径figure(2)plot([citys_end(:,1);citys_end(1,1)],...[citys_end(:,2);citys_end(1,2)],'o-')for i=1:length(citys)text(citys(i,1),citys(i,2),[' ' num2str(i)])endtext(citys_end(1,1),citys_end(1,2),[' 起点' ])text(citys_end(end,1),citys_end(end,2),[' 终点' ])title(['优化后路径(长度:' num2str(Length_end) ')'])axis([0 1 0 1])grid onxlabel('城市位置横坐标')ylabel('城市位置纵坐标')% 绘制能量函数变化曲线plot(1:iter_num,E);ylim([0 2000])title(['能量函数变化曲线(最优能量:' num2str(E(end)) ')']);xlabel('迭代次数');ylabel('能量函数');elsedisp('寻优路径无效');end% %===========================================% function du=diff_u(V,d)% global A D% n=size(V,1);% sum_x=repmat(sum(V,2)-1,1,n);% sum_i=repmat(sum(V,1)-1,n,1);% V_temp=V(:,2:n);% V_temp=[V_temp V(:,1)];% sum_d=d*V_temp;% du=-A*sum_x-A*sum_i-D*sum_d;% %==========================================% function E=energy(V,d)% global A D% n=size(V,1);% sum_x=sumsqr(sum(V,2)-1);% sum_i=sumsqr(sum(V,1)-1);% V_temp=V(:,2:n);% V_temp=[V_temp V(:,1)];% sum_d=d*V_temp;% sum_d=sum(sum(V.*sum_d));% E=0.5*(A*sum_x+A*sum_i+D*sum_d);% % % % 计算dufunction du=diff_u(V,d)global A Dn=size(V,1);sum_x=repmat(sum(V,2)-1,1,n);sum_i=repmat(sum(V,1)-1,n,1);V_temp=V(:,2:n);V_temp=[V_temp V(:,1)];sum_d=d*V_temp;du=-A*sum_x-A*sum_i-D*sum_d;% % % % % 计算能量函数function E=energy(V,d)global A Dn=size(V,1);sum_x=sumsqr(sum(V,2)-1);sum_i=sumsqr(sum(V,1)-1);V_temp=V(:,2:n);V_temp=[V_temp V(:,1)];sum_d=d*V_temp;sum_d=sum(sum(V.*sum_d));E=0.5*(A*sum_x+A*sum_i+D*sum_d);。
人工神经网络实验二用CHNN 算法求解TSP 问题一. 问题描述利用连续型Hopfield 反馈网络求解10城市的旅行商(TSP )问题。
其中10个城市的坐标给定如下:1(0.4000,0.4439),2(0.2439,0.1463),3(0.1707,0.2293),4(0.2293,0.7610),5(0.5171,0.9414),6(0.8732,0.6536),7(0.6878,0.5219),8(0.8488,0.3609),9(0.6683,0.2536),city city city city city city city city city ci =========10(0.6195,0.2634)ty =基本网络参数为:0500,200,0.02A B D C μ=====二. 算法实现1.CHNN 算法应用CHNN 网络解决优化问题一般需要以下步骤:(1.)对于特定的问题,要选择一种合适的表示方法,使得神经网络的输出与问题的解相对应。
(2.)构造网络的能量函数,使其最小值对应于问题的最佳解。
(3.)将能量函数与CHNN 算法标准形式相比较,推出神经网络权值与偏流表达式。
(4.)推出网络状态更新公式,并利用更新公式迭代求问题的最优解。
2.TSP 问题为使用CHNN 网络进行TSP 问题的求解,根据上述步骤,可将问题转化为: (1.)对N 个城市的TSP 问题,用一个N N ⨯的换位阵描述旅行路线,换位阵中每行每列有且只有一个元素为1,其余全为0。
为1的元素其横坐标x 表示城市名,纵坐标i 表示该城市在访问路线中的位置。
(2.)网络的能量函数由四部分组成,分别用来保证换位阵的合法性以及最终路线长度的最短。
2,1,1()()2222xi xj xi yi xi xy xi y i y i x i j i i x y x x i x i y xA B C D E v v v v v n d v v v +-≠≠≠=++-++∑∑∑∑∑∑∑∑∑∑∑(3.)将能量函数与标准形式相比较,得到网络权值与偏流表达式为:,,1,1(1)(1)()xi yj xy ij ij xy xy j i j i xiW A B C Dd I C n δδδδδδ+-=------+⎧⎪⎨=⋅⎪⎩ (4.)从而,网络更新公式为:,1,10()()1()[1tanh(/)]2xixi xj yi xi xy y i y i j i y x x i y xxi xi xi du u A v B v C v n D d v v dt v g u u u τ+-≠≠≠⎧=------+⎪⎪⎨⎪==⋅+⎪⎩∑∑∑∑∑3. 程序设计根据上述推导在MATLAB 中设计CHNN 网络求解TSP 问题的程序(程序代码见附页)。
文章编号:1007-757X (2006)11-0001-03利用Hopfield 神经网络求解旅行商问题研究杨秀梅,a 陈洪亮,a 董得义a摘 要:本文主要研究利用连续的Hopfield 网络求解TSP 问题,从连续的Hopfield 神经网络原理出发,结合TSP 问题的要求,在给定参数要求下求得问题的最优解。
并分析了实际算法的弱点,给出分析改进算法,加快了算法的收敛速度,改善有效解并提高最优解的比例。
关键词:连续的Hopfield 网络;旅行商问题;改进算法;优化中图分类号:TP 301 文献标识码:A1 概述用神经网络解决组合优化问题是神经网络应用的一个重要方面。
所谓组合优化问题,就是在给定约束条件下,使目标函数极小(或极大)的变量组合问题。
将Hopfield 网络应用于求解组合优化问题,把目标函数转化为网络的能量函数,把问题的变量对应到网络的状态。
这样,当网络的能量函数收敛于极小值时,问题的最优解也随之求出。
由于神经网络是并行计算的,其计算量不随维数的增加而发生指数性“爆炸”,因而对于优化问题的高速计算特别有效。
本文针对将Hopfield 理论应用于实践给出了研究性方法。
2 问题的提出TSP 问题,即所谓的旅行商问题。
问题的提法:在N 个城市中各经历一次后回到出发点,使所经过的路程最短。
其不同选择方案有(N -1)!/2种,在城市数较少的情况下可以用枚举等方法,但如果城市数量较大,例如,N=33时,使用枚举法求解就要考虑的情况是1025数量级,计算量如此之大是不可想象的。
将Hopfield 网络应用于求解TSP 问题,效果是显著的。
下面就利用连续的Hopfield 网络求解T SP 问题进行探讨。
3 Hopfield 神经网络及求解TSP 问题算法1)Hopfield 神经网络主要是模拟生物神经网络的记忆机理,是一种全连接型的神经网络,对于每个神经元来说,自己输出的信号通过其他神经元又反馈到自身,所以Hopfield 神经网络是一种反馈型神经网络。
连续的Hopfield 神经网络状态的演变过程是一个非线性动力学系统,可以用一组非线性微分方程来描述。
系统的稳定性可用所谓的“能量函数”(即李雅普诺夫或哈密顿函数)进行分析。
在满足一定条件下,某种“能量函数”的能量在网络运行过程中不断地减小,最后趋于稳定的平衡状态。
反馈网络达稳定状态时可以使系统的能量达极小,因而可用于一些最优化问题的计算,能量公式如下:E =-126N i =16N j =1T ij v i v j -6N i =1H i v i =-12v T Tv -v T 在实践中,Hopfield 神经网络理论可应用于很多领域。
但实际中由于将理论转化为实践存在一些技术难点需要解决,导致实际中很少用。
下面以TSP 问题进行连续的Hopfield 神经网络理论应用研究。
2)求解TSP 问题算法实例:本实验中采用Hopfield 网络的方法实现以5个城市为例的TSP 问题。
设有5个城市A,B,C,D,E,用d xy (x,y ∈{A,B,C,D,E})表示城市x 和城市y 之间的距离(d xy >0)。
有一推销员从某一城市出发(如从城市C 出发)访问各城市一次且仅一次后再回到原出发城市,要求找出一条最短的巡回路线,即:I =d CA +d AE +d E B +d BD +d DC →m in 。
建模:在5-T SP 中,如城市1在第3个被访问,则对应的向量为V (1)=00100。
5个城市TSP 问题需用5*5个神经元来实现,而每行每列都只能有一个1,其余为0,该阵称为换位矩阵。
换位矩阵中1的和为5,所构造的函数极小值对应于最短路径。
式中取S =1.0;u 0为符号函数的参量,u 0越小,符号函数的离散化程度越高。
在进行迭代前,要对uxi 赋初值,不妨令u xi,init =-0.5*u 0*1n (N-1)*(1+D ),D 是在(-0.1,0.1)的随机数。
在迭代时,u t+1xi =u t xi +du xi dt *D t 为运算步长。
因为能量在极小值时变化最慢,所以将能量函数E 变化小到一定程度作为结束标变化小到一定程度作为结束标志,即$E F Min_value 。
如果超过了一定的迭代次数仍没有收a a a 董得义,上海交通大学电信学院,上海 200240陈洪亮,上海交通大学电信学院,上海 200240作者简介:杨秀梅,上海交通大学电信学院,硕士研究生,上海 200240敛,则强行终止。
3 算法的脆弱性分析在实际算法实现上,该算法的求解受到一些变量的制约,使得该算法很难求取最优解,而且经常会出现一些无效解的情况。
通过分析研究,发现主要参数影响算法实现的现象如下,其中初始值对最终函数能否收敛到最优点起到至关重要的作用,我们使用计算机自带的随机函数,因为所产生的随机数的随机性较差,最好自编随机性较好的随机函数,这样才能使算法比较容易达到最优。
初值尽量取在0附近且随机分布。
另外,所给定的程序参数中,D值越小,算法越易收敛到最优解,当D值较大时,如D=500,比较难找到最优解,不进行优化前,算法得到有效解都非常困难。
其它参数值在算法优化后对算法的影响很小,取一般参考书上所给定的参考值即可,在此不进行详细分析。
4 算法的改进针对上面提到的算法弱点,实际实现中对算法进行如下改进:a)找最优解针对初值对最优解的求取起决定性的作用,和对随机函数的随机性不够的弥补,在整个函数外增加一层循环,即在多次初值收敛结果中找最优解。
找最优解的方法是根据能量最小对应距离最短,通过比较所有迭代中有效解的能量最小点来求最优解。
c)加快算法收敛速度为了更快使算法收敛,根据算法的特性,因为当程序达到最优时,V矩阵每行和为1,在每次迭代求取Vxi值后,对V矩阵按行求和后与1比,通过该比值将V 矩阵每行和向1靠近。
实际发现,通过优化,函数收敛速度明显加快。
b)改善有效解针对上面提到的得到有效解的概率较低,当存在两行(或列)以内为全0时,在交叉通过加1补正。
优化前,当D值大于20时,算法很难得到最优解,有效解的比例也非常小;优化后D取500时,有效解的比例也很大,而且明显出现了最优解。
d)适当选取D值,提高最优解比例实测发现,在300次循环中,D取100以内值,每次运行能100%得到最优解。
当D= 500时,有40%以上能得到最优解。
当循环次数提高到1000时,基本上每次都能得到最优解。
5 程序说明a)程序框图b)初始数据:TSP问题,5个城市间距离如下表1所示。
图1 程序框图表1A B C D EA0761013B7071010C67059D1010506E1310960 取m_nA=500,m_nB=500,m_nC=200,m_nD= 500,m_dU0=0.02,实际程序中可根据需要输入参数值,S= 1.0。
4 TSP问题求解结果分析1)穷举法的结果:因为本例中城市数少,可对此问题采用穷举法求出结果以供检验,和Hopfield 网络方法比较。
结果如下:34为最优解,38为次优解,平均路程长度为41.5。
2)程序运行结果分析实际中通过针对不同D 值运行程序,程序运行界面如图2所示。
图2.1 程序运行界面一图2.2 程序运行界面二每种D 值测试12次,得到实测结果,通过对数据分析,可以得到解的比例与D 值关系图和达到最优解的平均迭代次数与D 值关系图如图3和图4所示。
图3 测试所得解的比例与D 值关系图通过图1和图2可以看出,D 值越小,越容易得到最优解,且最优解的比例越高,当D 值小于100时,每次运行都能够得到最优解。
优化后,基本上所有解都是最优34和次优解38。
将循环次数增大到1000次后,D=500时,基本上每次都能得到最优解。
5 结束语本文主要通过利用连续的Hopfield 网络求解TSP 问题,在给定参数要求下求得问题的最优解。
本文作者的创新点在于针对实际算法的弱点,进行分析和研究,自编随机性较好的随机函数,使算法比较容易达到最优。
给出改进算法,加快了算法的收敛速度,改善有效解并优化最优解的比例。
该系统的扩展性能也比较好,当增大神经元个数,适当改变参数,也能达到比较好的效果。
图4 达到最优解的平均迭代次数与D 值关系图参考文献:[1]胡守仁.神经网络应用技术[M].北京:国防科技大学出版社,1993.[2]党建武靳蕃,神经网络方法在解C -TSP 中的应用,兰州铁道学院学报1994年第13卷第1期,[3]张乃尧阎平凡,神经网络与模糊控制,清华大学出版社,1998年10月第1版[4]陈萍.对Hopfield 神经网络求解TSP 的研究[J ].北京邮电大学学报,1999-7.[5]王永骥涂健,神经元网络控制,机械工业出版社,1999年7月第1版[6]郭鹏.Hopfield 网络在优化计算中的应用[J ].计算机仿真,2002- 5.[7]刘剑平.T SP 邻近算法在Euclid 平面上的性能比分析[J ].华东理工大学学报(自然科学版),2004,30(3):3362338.(收稿日期:2006-5-23)。