基于MATLAB直流电机起动设计与仿真-课程设计报告
- 格式:doc
- 大小:1.05 MB
- 文档页数:20

一种基于Matlab的无刷直流电机控制系统建模仿真方法一、本文概述无刷直流电机(Brushless DC Motor, BLDC)以其高效率、低噪音、长寿命等优点,在航空航天、电动汽车、家用电器等领域得到广泛应用。
为了对无刷直流电机控制系统进行性能分析和优化,需要建立精确的数学模型并进行仿真研究。
Matlab作为一种强大的数学计算和仿真软件,为无刷直流电机控制系统的建模仿真提供了有力支持。
二、无刷直流电机控制系统原理1、无刷直流电机基本结构和工作原理无刷直流电机(Brushless Direct Current Motor,简称BLDCM)是一种基于电子换向技术的直流电机,其特点在于去除了传统直流电机中的机械换向器和电刷,从而提高了电机的运行效率和可靠性。
无刷直流电机主要由电机本体、电子换向器和功率驱动器三部分组成。
电机本体通常采用三相星形或三角形接法,其定子上分布有多个电磁铁(也称为线圈),而转子上则安装有永磁体。
当电机通电时,定子上的电磁铁会产生磁场,与转子上的永磁体产生相互作用力,从而驱动转子旋转。
电子换向器是无刷直流电机的核心部分,通常由霍尔传感器和控制器组成。
霍尔传感器安装在电机本体的定子附近,用于检测转子位置,并将位置信息传递给控制器。
控制器则根据霍尔传感器提供的位置信息,控制功率驱动器对定子上的电磁铁进行通电,从而实现电机的电子换向。
功率驱动器负责将控制器的控制信号转换为实际的电流,驱动定子上的电磁铁工作。
功率驱动器通常采用三相全桥驱动电路,具有输出电流大、驱动能力强等特点。
无刷直流电机的工作原理可以简单概括为:控制器根据霍尔传感器检测到的转子位置信息,控制功率驱动器对定子上的电磁铁进行通电,产生磁场并驱动转子旋转;随着转子的旋转,霍尔传感器不断检测新的转子位置信息,控制器根据这些信息实时调整电磁铁的通电状态,从而保持电机的连续稳定运行。
由于无刷直流电机采用电子换向技术,避免了传统直流电机中机械换向器和电刷的磨损和故障,因此具有更高的运行效率和更长的使用寿命。

摘要无刷直流电动机的最本质特征就是没有机械换向结构,取而代之的是逻辑电路和功率开关线路共同组成的电子换相器,它把直流电逆变成交流电并按一定的次序通入电动机的定子绕组中以产生与定子磁场正交的转子磁场。
在使用中无刷直流电机相比有刷电机有许多的优点,比如:能获得更好的扭矩转速特;性高速动态响应;高效率;长寿命;低噪声;高转速。
本文主要研究了无刷直流电机调速系统的基本方法,主要内容有无刷直流电机的基本原理,脉宽调速系统的原理和控制方法,在此基础上重点研究了无刷直流电机的换相控制,并对无刷直流电动机调速系统进行设计。
最后利用MATLAB\Simulink——面向电气原理结构图的仿真技术,设计了一个转速单闭环无刷直流电机可逆脉宽调速系统,对其进行仿真,并根据仿真结果分析研究无刷直流电动机。
关键词:调速,PWM控制,无刷直流电动机,仿真AbstractHaving no mechanical converter is Brushless DC motor essential feature.The structure is to replaced by a logic and power switching circuit composed of electronic commutator, which invert the direct current into alternating current according to certain reverse the order of access motor stator windings in order to generate the rotor magnetic field orthogonal to the stator magnetic field. Compared to traditional DC motor, Brushless DC motor has many advantages, such as: access to better torque speed characteristics; of high-speed dynamic response; high efficiency; long life; low noise; high speed. This paper mainly studies the basic method of brushless DC motor speed control system, the main contents of this paper are including the basic principles of Brushless DC motor, PWM Speed Control System and the control method, and brushless DC motor speed control system design. Finally, MATLAB \ Simulink - Electric-principle-oriented for the simulation technology is used in design a single closed loop brushless DC motor speed reversible PWM speed control system, then simulate the system, and analyse the simulation results in order to research the feature of BLDCM.Key words: speed regulation, PWM control, BLDC motor, simulation目录第一章引言1.1无刷直流电机发展简介 (4)1.2无刷直流电机调速系统的研究现状和未来发展 (5)1.3 本设计的主要内容 (5)第二章无刷直流电机原理2.1 无刷直流电机的概述 (7)2.2 电动机本体 (8)2.2.1 定子 (9)2.2.2 转子 (9)2.2.3 有关电机本体设计的问题 (10)2.3 转子位置检测 (10)2.3.1 位置传感器法 (11)2.3.2 无位置传感器法 (12)2.4 PWM技术 (14)2.5无刷直流电机电子换相器 (16)2.6 无刷直流的基本方程 (18)第三章无刷直流电动机调速系统的设计3.1 主电路供电方案 (22)3.2主电路形式的选择 (23)3.3基于MC33035的无刷直流电机控制系统 (24)3.3.1MC33035无刷直流电机控制芯片 (24)3.3.2基于MC33035的无刷直流电动机调速系统设计方案 (26)第四章直流脉宽调速系统的MATLAB仿真4.1电源、逆变桥和无刷直流电机模型 (27)4.2换相逻辑控制模块 (29)4.3控制器和控制电平转换及PWM发生环节 (34)4.3.1起动,阶跃负载仿真 (36)4.3.2可逆调速仿真 (39)总结 (41)参考文献 (42)致谢 (43)第一章引言1.1 无刷直流电机发展简介目前国内外对无刷直流电机的(Brushless DC Motor,BLDCM)的定义有两种:一种是认为只有梯形波/方波无刷直流电机才可被称为无刷直流带电机,而正弦波无刷直流电机则被称为永磁同步电机(Permanent Magnet Synchronous Motor,PMSM);另一种定义认为梯形波/方波无刷直流电机都是无刷直流电机。


直流电机调速matlab仿真报告以直流电机调速Matlab仿真报告为标题引言:直流电机是一种常见的电动机,广泛应用于工业、交通、家电等领域。
在实际应用中,电机的调速控制是一项关键技术,可以使电机在不同工况下实现恒定转速或变速运行。
本文将利用Matlab软件进行直流电机调速的仿真实验,旨在通过仿真结果分析不同调速控制策略的优劣,并提供一种基于Matlab的直流电机调速方法。
一、直流电机调速原理直流电机的调速原理基于电压与转速之间的关系。
电机的转速与输入电压成正比,即在给定电压下,电机转速可以通过调整电压大小来实现调速。
常用的直流电机调速方法有电压调速、电流调速和PWM调速等。
二、Matlab仿真实验设置本次仿真实验将以直流电机调速为目标,基于Matlab软件进行实验设置。
首先,需要建立电机的数学模型,包括电机的转速、电流和电压等参数。
其次,选择合适的调速控制策略,如PID控制、模糊控制或神经网络控制等。
最后,通过调节电压输入,观察电机的转速响应和稳定性。
三、PID控制调速实验1. 实验目的本实验旨在通过PID控制器对直流电机进行调速控制,并分析不同PID参数对控制效果的影响。
2. 实验步骤(1) 建立直流电机的数学模型;(2) 设计PID控制器,包括比例系数Kp、积分系数Ki和微分系数Kd;(3) 利用Matlab软件进行仿真,设定电机的目标转速和初始转速;(4) 通过调节PID参数,观察电机的转速响应和稳定性。
3. 实验结果与分析根据实验设置,我们分别对比了不同PID参数值下的电机转速响应曲线。
结果显示,在合适的PID参数设置下,电机能够实现快速响应和稳定控制。
但是,过大或过小的PID参数值都会导致转速超调或调速不稳定的问题。
四、模糊控制调速实验1. 实验目的本实验旨在通过模糊控制器对直流电机进行调速控制,并分析不同模糊规则和输入输出的影响。
2. 实验步骤(1) 建立直流电机的数学模型;(2) 设计模糊控制器,包括模糊规则、输入变量和输出变量;(3) 利用Matlab软件进行仿真,设定电机的目标转速和初始转速;(4) 通过调节模糊规则和输入输出变量,观察电机的转速响应和稳定性。
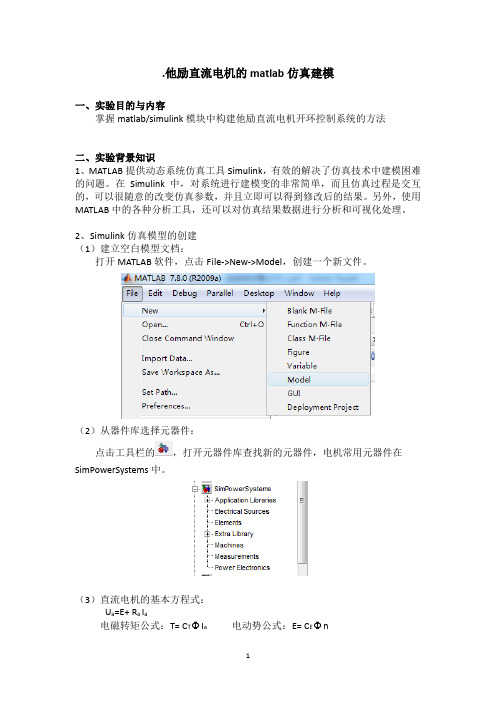
.他励直流电机的matlab仿真建模一、实验目的与内容掌握matlab/simulink模块中构建他励直流电机开环控制系统的方法二、实验背景知识1、MATLAB提供动态系统仿真工具Simulink,有效的解决了仿真技术中建模困难的问题。
在Simulink 中,对系统进行建模变的非常简单,而且仿真过程是交互的,可以很随意的改变仿真参数,并且立即可以得到修改后的结果。
另外,使用MATLAB中的各种分析工具,还可以对仿真结果数据进行分析和可视化处理。
2、Simulink仿真模型的创建(1)建立空白模型文档:打开MATLAB软件,点击File->New->Model,创建一个新文件。
(2)从器件库选择元器件:点击工具栏的,打开元器件库查找新的元器件,电机常用元器件在SimPowerSystems中。
(3)直流电机的基本方程式:U a=E+ R a I a电磁转矩公式:T= C TΦI a 电动势公式:E= C EΦn三、仿真模型的建立1、元器件选取序号名称对应元器件库1 他励直流电机2可调压电枢电源3直流励磁电源4 示波器5 阶跃参数信号6 常数参数信号7 增益模块2、仿真模型四、参数设定(1)电机参数设定:参数设定参数符号数值励磁电压Uf 220V电枢电压Ua 160V励磁电阻Rf 146.7Ω电枢电阻Ra 1.27Ω励磁和电枢互感Laf 0.5107转动惯量J 0.2kgm2粘滞摩擦系数Bm 0库仑摩擦转矩Tf 0(2)电枢电压设定(实验共仿真12秒)调速:初始电枢电压为额定电压160V;6秒时调压调速,电枢电压降低为123.9V;制动:初始电枢电压为额定电压160V;6秒时能耗制动,电枢电压降低为0。
五、实验仿真与思考 1、调压调速仿真图1由图1得:(1)第6秒开始电枢电压减小,转速n 降低,一段时间后,电机趋于稳定。
实现改变 电枢电压调节转速。
(2)调速方向是往下调。
(3)调速的平滑性好,只要均匀地调节电枢电压就可以实现平滑的无级调速。

基于MATLAB的直流电机双闭环调速系统的设计与仿真直流电机双闭环调速系统是一种常见的控制系统,常用于工业生产中对电机速度的精确控制。
本文将基于MATLAB软件进行直流电机双闭环调速系统的设计与仿真,包括系统设计、参数设置、控制策略选择、系统仿真以及性能分析等方面。
文章将以1200字以上的篇幅进行详细阐述。
一、系统设计直流电机双闭环调速系统由速度环和电流环构成。
速度环控制系统的输入为速度设定值和电机实际速度,输出为电机期望电压;电流环控制系统的输入为速度环输出的电压和电机实际电流,输出为电机实际电压。
通过控制电机的期望电压和实际电压,达到对电机速度的调控。
二、参数设置在进行系统仿真之前,需要确定系统中各个参数的值。
包括电机的额定转矩、额定电压、电感、电阻等参数,以及控制环节的比例增益、积分增益、微分增益等参数。
这些参数的选择会影响系统的稳定性和动态性能,需要根据实际情况进行调整。
三、控制策略选择常见的控制策略包括PID控制、PI控制、PD控制等。
在直流电机双闭环调速系统中,可以选择PID控制策略。
PID控制器由比例环节、积分环节和微分环节组成,可以提高系统的稳定性和响应速度。
四、系统仿真在MATLAB中进行直流电机双闭环调速系统的仿真,可以使用Simulink模块进行搭建。
根据系统设计和参数设置,搭建速度环和电流环的控制器,连接电机实际速度和电机实际电流的反馈信号,输入速度设定值和电机期望电流,输出电机期望电压。
通过仿真可以得到系统的动态响应曲线,评估系统的性能。
五、性能分析在仿真结果中,可以分析系统的静态误差、超调量、调整时间等指标,评估系统的控制性能。
通过参数调整和控制策略更改等方式,可以优化系统的控制性能,使系统达到更好的调速效果。
总结:本文基于MATLAB软件对直流电机双闭环调速系统进行了设计与仿真。
通过系统设计、参数设置、控制策略选择、系统仿真以及性能分析等步骤,可以得到直流电机双闭环调速系统的动态响应曲线,并通过参数调整和控制策略更改等方式,优化系统的控制性能。
物理与电子工程学院《电力拖动自动控制系统》课程设计报告书设计题目:直流电机起动设计与仿真专业:自动化xxx班级: 2014xxxxx本1班学生姓名: xxxxxxxx学号: 20140343121指导教师: xxxxxxxxxx2015年10月25 日物理与电子工程学院课程设计任务书专业:自动化班级:14xxxx1班摘要直流电动机具有调速范围广、调速平稳、过载能力强以及启动和制动转矩大等优点,在工农业生产中得到了广泛的应用。
文章研究了直流电动机串电阻起动方法,在直流电动机电枢绕组中串入电阻来降低起动电流和起动转矩。
相比于电机直接起动,串入电阻起动起动电流和起动转矩显著减低,而且成本又增加不多,在实际工农业生产中有广泛的应用,在课程设计中总共设了3级电阻,第一级电阻R1=0.518,第二季电阻R2=0.32,第三级电阻R3=0.162。
关键词:直流电动机;直接启动;串电阻启动;仿真;目录1 任务提出与方案论证 (1)1.1提出任务 (1)1.2方案论证 (1)2 总体设计 (1)2.1系统总体原理框图 (1)2.2直流电动机直接起动真模型仿真的建立 (2)2.3直流电动机串电阻起动真模型仿真的建立 (5)2.4直流电动机串电阻起动时电阻值计算以及仿真结果分析 (5)3 心得体会 (13)1 任务提出与方案论证1.1提出任务直流电动机刚与电源接通的瞬间,转子尚未转动起来时,他励和串励电动机的电枢电流以及并励和复励电动机的输入电流称为起动电流,这时的电磁转矩称为起动转矩。
一般情况下,在额定电压下直接起动时,起动电流可达电枢电流额定值的10~20倍,起动转矩也能达到额定转矩的10~20倍,这样的起动电流是换向所不允许的,而且过大的起动转矩会使电动机和它所拖动的生产机械遭受突然的巨大冲击,以致损坏传动机械和生产机械。
由此可见,除了额定功率在数百瓦以下的微型直流电动机,因电枢绕组导线细、电枢电阻大以及转动惯量又比较小,可以直接起动以外,一般的直流电动机是不允许采用直接起动的。
重庆理工大学毕业设计(论文)开题报告题目直流电机调速系统仿真设计1、本课题国内外的研究现状分析直流调速系统凭借优良的调速特性,调速平滑、范围宽、精度高、过载能力大、动态性能好、易于控制以及良好的起、制动性能等优点,能满足生产过程自动化系统中各种不同的特殊运行要求,所以在电气传动中获得了广泛应用。
为了提高直流调速系统的动静态性能指标,通常采用闭环控制系统(包括单闭环系统和多闭环系统)。
对调速指标要求不高的场合,采用单闭环系统,而对调速指标较高的则采用多闭环系统。
直流调速系统在理论上和实践上都比较成热,从控制技术的角度来看,它又是交流调速系统的基础,因此,直流调速系统的应用研究有实际意义。
自从MATLAB的Simulink推出以后,动态系统的仿真就变得非常容易了。
因其含有极为丰富的专用于控制工程与系统分析的函数,具有强大的数学计算功能,且提供方便的图形绘制功能,只要在Simulink中画出系统的动态结构图模型,编写极简单的程序,即可对该系统进行仿真,效率极高,环境友好,从而给系统的设计和校正带来很大的方便。
MATLAB在学术和许多实际领域都得到广泛应用,已成为国际控制界应用最广的语言和工具。
2、本人对课题任务书提出的任务要求及实现目标的可行性分析(只限工科类)本课题要求完成直流电机双闭环调速系统的工程设计并利用MATLAB实现仿真,通过选择及设计各个模块的系统以及对参数的选择,最终得到预期的仿真结果。
任务要求如下:(1)直流电机调速原理分析(2)双闭环调速系统特性分析(3)系统总体方案设计(4)系统仿真设计可行性分析:本课题是针对直流电动机设计的双闭环调速系统,通过MATLAB软件对所设计的系统进行仿真验证。
通过学习《电机与拖动》、《电力电子技术》、《电力拖动自动控制系统》等相关课程基本掌握了电机调速的一些知识,并对直流电机调速系统有了一定的了解。
同时,通过自学《电机与拖动基础及MATLAB仿真》以及《交直流调速系统与MATLAB仿真》使我对MATLAB软件有了一定的了解,并能通过软件对本课题实现仿真,以上所述便能基本完成本课题的任务要求。
第一章课程设计内容及要求1.直流电动机的机械特征仿真;2.直流电动机的直接起动仿真;3.直流电动机电枢串连电阻启动仿真;4.直流电动机能耗制动仿真;5.直流电动机反接制动仿真;6.直流电动机改变电枢电压调速仿真;7.直流电动机改变励磁电流调速仿真。
要求:编写 M文件,在 Simulink环境画仿真模型原理图,用二维绘图命令画仿真结果图或用示波器察看仿真结果,并加以剖析第二章直流电动机的电力拖动仿真绘制1)直流电动机的机械特征仿真clear;U_N=220;P_N=22;I_N=115;n_N=1500;R_a=0.18;R_f=628;Ia_N=I_N-U_N/R_f;C_EPhi_N=(U_N-R_a*Ia_N)/n_N;C_TPhi_N=9.55*C_EPhi_N;Ia=0;Ia_N;n=U_N/C_EPhi_N-R_a/(C_EPhi_N)*Ia;Te=C_TPhi_N*Ia;P1=U_N*Ia+U_N*U_N/R_f;T2_N=9550*P_N/n_N;figure(1);plot(Te,n,'.-');xlabel(' 电磁转矩Te/N.m');ylabel(' 转矩 n/rpm');ylim([0,1800]);figure(2);plot(Te,n,'rs');xlabel(' 电磁转矩Te/N.m');ylabel(' 转矩 n/rpm');hold on;R_c=0;for coef=1:-0.25;0.25;U=U_N*coef;n=U/C_EPhi_N-(R_a+R_c)/(C_EPhi_N*C_TPhi_N)*Te;plot(Te,n,'k-');str=strcat('U=',num2str(U),'V');s_y=1650*coef;text(50,s_y,str);endfigure(3);n=U_N/C_EPhi_N-(R_a+R_c)/(C_EPhi_N*C_TPhi_N)*Te;plot(Te,n,'rs');xlabel(' 电磁转矩Te/N.m');ylabel(' 转矩 n/rpm');hold on;U=U_N;R_c=0.02;for R_c=0:0.5:1.9;n=U/C_EPhi_N-(R_a+R_c)/(C_EPhi_N*C_TPhi_N)*Te;plot(Te,n,'k-');str=strcat('R=',num2str(R_c+R_a),'\Omega');s_y=400*(4-R_c*1.8);text(120,s_y,str);endylim([0,1700]);figure(4);R_c=0;n=U_N/C_EPhi_N-(R_a+R_c)/(C_EPhi_N*C_TPhi_N)*Te; plot(Te,n,'rs');xlabel(' 电磁转矩Te/N.m');ylabel(' 转矩 n/rpm');hold on;U=U_N;R_c=0.02;for R_c=0.5:0.25:1.3;C_EPhi=C_EPhi_N*coef;C_TPhi=C_TPhi_N*coef;n=U/C_EPhi_N-(R_a+R_c)/(C_EPhi_N*C_TPhi_N)*Te;plot(Te,n,'k-');str=strcat('\phi=',num2str(coef),'*\phi_N');s_y=900*(4-coef*2.2);text(120,s_y,str);enda)固有机械特征b)降低电枢电压人为机械特征c) 增添电枢电阻人为机械特征d) 改变磁通人为机械特征2)直流电动机直接起动仿真直流电动机直接起动时,起动电流很大,能够达到额定电流的 10-20 倍,由此产生很大的冲击转矩。
直流调速系统的MATLAB 仿真一、开环直流速系统的仿真开环直流调速系统的电气原理如图1所示。
直流电动机的电枢由三相晶闸管整流电路经平波电抗器L 供电,通过改变触发器移相控制信号c U 调节晶闸管的控制角α,从而改变整流器的输出电压,实现直流电动机的调速。
该系统的仿真模型如图2所示。
图1 开环直流调速系统电气原理图图2 直流开环调速系统的仿真模型为了减小整流器谐波对同步信号的影响,宜设三相交流电源电感s 0L =,直流电动机励磁由直流电源直接供电。
触发器(6-Pulse )的控制角(alpha_deg )由移相控制信号c U 决定,移相特性的数学表达式为minc cmax9090U U αα︒-=︒-在本模型中取min 30α=︒,cmax 10V U =,所以c 906U α=-。
在直流电动机的负载转矩输入端L T 用Step 模块设定加载时刻和加载转矩。
仿真算例1 已知一台四极直流电动机额定参数为N 220V U =,N 136A I =,N 1460r /min n =,a 0.2R =Ω,2222.5N m GD =⋅。
励磁电压f 220V U =,励磁电流f 1.5A I =。
采用三相桥式整流电路,设整流器内阻rec 0.3R =Ω。
平波电抗器d 20mH L =。
仿真该晶闸管-直流电动机开环调速系统,观察电动机在全压起动和起动后加额定负载时的电机转速n 、电磁转矩e T 、电枢电流d i 及电枢电压d u 的变化情况。
仿真步骤:1)绘制系统的仿真模型(图2)。
2)设置模块参数(表1) ① 供电电源电压N rec N 2min 2200.3136130(V)2.34cos 2.34cos30U R I U α++⨯==≈⨯︒② 电动机参数 励磁电阻:f f f 220146.7()1.5U R I ===Ω 励磁电感在恒定磁场控制时可取“0”。
电枢电阻:a 0.2R =Ω电枢电感由下式估算:N a N N 0.422019.119.10.0021(H)2221460136CU L pn I ⨯==⨯≈⨯⨯⨯电枢绕组和励磁绕组间的互感af L :N a N e N 2200.21360.132(V min/r)1460U R I K n --⨯==≈⋅ T e 60600.132 1.262π2πK K ==⨯≈T af f 1.260.84(H)1.5K L I === 电机转动惯量2222.50.57(kg m )449.81GD J g ==≈⋅⨯③ 额定负载转矩L T N 1.26136171.4(N m)T K I ==⨯≈⋅表1 开环直流调速系统主要模型参数3)设置仿真参数:仿真算法odel5s ,仿真时间5.0s ,直流电动机空载起动,起动2.5s 后加额定负载L 171.4N m T =⋅。
物理与电子工程学院
《电力拖动自动控制系统》课程设计报告书
设计题目:直流电机起动设计与仿真
专业:自动化xxx
班级: 2014xxxxx本1班
学生姓名: xxxxxxxx
学号: 20140343121
指导教师: xxxxxxxxxx
2015年 10月 25 日
物理与电子工程学院课程设计任务书
专业:自动化班级:14xxxx1班
摘要
直流电动机具有调速范围广、调速平稳、过载能力强以及启动和制动转矩大等优点,在工农业生产中得到了广泛的应用。
文章研究了直流电动机串电阻起动方法,在直流电动机电枢绕组中串入电阻来降低起动电流和起动转矩。
相比于电机直接起动,串入电阻起动起动电流和起动转矩显著减低,而且成本又增加不多,在实际工农业生产中有广泛的应用,在课程设计中总共设了3级电阻,第一级电阻R1=0.518,第二季电阻R2=0.32,第三级电阻R3=0.162。
关键词:直流电动机;直接启动;串电阻启动;仿真;
目录
1 任务提出与方案论证 (1)
1.1提出任务 (1)
1.2方案论证 (1)
2 总体设计 (1)
2.1系统总体原理框图 (1)
2.2直流电动机直接起动真模型仿真的建立 (2)
2.3直流电动机串电阻起动真模型仿真的建立 (5)
2.4直流电动机串电阻起动时电阻值计算以及仿真结果分析 (5)
3 心得体会 (13)
1 任务提出与方案论证
1.1提出任务
直流电动机刚与电源接通的瞬间,转子尚未转动起来时,他励和串励电动机的电枢电流以及并励和复励电动机的输入电流称为起动电流,这时的电磁转矩称为起动转矩。
一般情况下,在额定电压下直接起动时,起动电流可达电枢电流额定值的10~20倍,起动转矩也能达到额定转矩的10~20倍,这样的起动电流是换向所不允许的,而且过大的起动转矩会使电动机和它所拖动的生产机械遭受突然的巨大冲击,以致损坏传动机械和生产机械。
由此可见,除了额定功率在数百瓦以下的微型直流电动机,因电枢绕组导线细、电枢电阻大以及转动惯量又比较小,可以直接起动以外,一般的直流电动机是不允许采用直接起动的。
1.2方案论证
方案一:直流电动机直接启动
直流电动机直接启动适用于额定功率在数百瓦以下的微型直流电动机,因电枢绕组导线细、电枢电阻大以及转动惯量又比较小,可以直接起动,但是现在工业中绝大数机械都是大功率。
方案二:直流电动机串电阻启动
直流电动机串电阻起动方法,在直流电动机电枢绕组中串入电阻来降低起动电流和起动转矩。
相比于电机直接起动,串电阻起动起动电流和起动转矩显著减低,而且成本又增加不多,在实际工农业生产中有广泛的应用。
最终选择:
经过比较本设计选择方案二直流电动机串电阻启动能更好的达到设计要求。
2 总体设计
2.1系统总体原理框图
直流电动机启动的设计,我们首先对电路原理进行分析,通过分析,结合具体的性能指标求出相应的参数,然后在Matlab仿真软件中建立仿真模型,仿真模型采用交流输入电源,使用晶闸管和二极管作为整流器件,通过不断仿真、调
试、不断修改参数,知道符合正确的参数要求。
其系统原理框图如下图2.1。
图2.1 系统原理框图
2.2直流电动机直接起动真模型仿真的建立
(1)图中的模块有直流电源(DC Voltage Source)、理想开关、直流电动机、开关、增益、电阻(RLC branch)、示波器(scope)、信号分离模块(Demux)。
仿真模型中通过理想开关模块控制直流电源的接通和断开,使用开关模块控制电机的转矩,使电机在起动过程中的转矩为空载起动,当转速达到设定值后,使电机工作再给定的负载转矩。
图2.2 直流电动机直接起动仿真模型
图2.4 电压参数设置
图2.5 仿真图
图2.6 电流-转速图
2.3直流电动机串电阻起动仿真模型的建立
直流电动机串电阻起动仿真模型如图2.7所示,该模型在直接起动模型的基础上,在电枢回路中串联一个由三级电阻组成的启动器。
在每个电阻(R1、R2、R3)上并联一个理想开关,用于切除电阻,开关受Step 模块控制。
(注:在Step 模块对话框中设定单位阶跃信号发生时刻,即可控制开关的闭合,从而短接该电阻)。
模型检测将转速n 、电枢电流I 等送入示波器。
图2.7 直流电动机串电阻起动仿真模型
2.4直流电动机串电阻起动时电阻值计算以及仿真结果分析
为了实现直流电动机串电阻起动,对于电枢绕组串入电阻值的计算非常重要,需要计算精确,本文为了尽可能地降低起动电流和起动转矩,采用三级串电阻计算方法。
具体实现步骤如下。
(1)将step 模块2和3的阶跃信号发生时间设为“0”,step1设为20s ,使1
R 接入电枢回路,并初选R'1的阻值。
a.
1'R =m ax
I n
C U e N
--a R =
Ω≈-10896.0220
220
在模型中设1R =1'R =1,
得到
n(r/min)
i/A
a
i/A
f
e T (N.m)
图2.8 串一级电阻启动时的转速和电流波形
由图2.8可知,串联电阻后最大启动电流为200A ,在3.5s 时电流下降到100A ,对应的转速为1500r/min ,相对于直流电机直接起动,起动电流从2500A 变为200A ,显著地减低了,起到了保护电机的作用。
为了进一步减少起动电流,需要减小启动电阻,计算1R 的阻值和预选2'R 阻值。
b.2'R =m ax
I n
C U
e N
--
a R =Ω≈Ω-Ω⨯482.00896.0200
15000.07808-220
c.1R =1'R -2'R =1-0.482=0.518Ω
(2)重新设定R 1和R 2(R 2=R'2)并设step1的信号发生时间为3.5s ,设step2的信号发生时间为20s 得到仿真图形如图2.9所示。
n(r/min)
i/A
a
i/A
f
e T (N.m)
图2.9 串二级电阻启动时的转速和电流波形
c.从图 2.9中可知,在启动6s 后电流再次下降到100A ,此时的转速为2200r/min 。
为了进一步减少起动电流,需要再次减小启动电阻。
根据式d 和e 可以计算2R 和3R 阻值。
d.
2
R =
m ax
I n
C U e N
--
a R =Ω≈Ω-Ω⨯32.00896.0200
22000.07808-220
e.3R =2'R -2R =0.482-0.32=0.162Ω
(4)重新设定2R 和3R 并设step2的信号发生时间为6s ,设step3的信号发生时间为20s 得到仿真图形如图2.10所示。
n(r/min)
a i /A
i/A
f
T(N.m)
e
图2.10 串三级电阻启动时的转速和电流波形
从图2.10可知在启动8s后起动电流再次下降到100A,此时的转速为
2800r/min,需要再次切除
R,因此设step3的信号发生时间为8s,再次仿真,
3
得到图形如2.11所示。
n(r/min)
i/A
a
图2.11 切除
R启动时的转速和电流波形
3
由图2.11可知:在切除
R后,转速升到3000r/min,在整个启动过程中电流限制在规
3
定的范围内,满足设计要求。
3 心得体会
通过这次课程设计使我对原来学习的过程有了全新认识,学习一定要理论与实践相结合,这样才能更好地学习知识,我用的软件是MATLAB,它也是实验中最重要的一环,用的最多的是Simulink。
Simulink是MATLAB中的一种可视化仿真工具,是一种基于MATLAB的框图设计环境,是实现动态系统建模、仿真和分析的一个软件包,被广泛应用于线性系统、非线性系统、数字控制及数字信号处理的建模和仿真中。
为了创建动态系统模型,Simulink提供了一个建立模型方块图的图形用户接口(GUI) ,这个创建过程只需单击和拖动鼠标操作就能完成,它提供了一种更快捷、直接明了的方式,而且可以立即看到系统的仿真结果。
在这次课程设计中我又进一步学习了电机启动的一些知识,也由感性认识上升到实践,这样我对串电阻启动的参数的计算以及设定有了更深刻的认识,也在仿真过程中对参数改变带来的其他变化一目了然,使知识学的活灵活现,还有对直接启动的危害有了更深的了解。
另外这次课程设计让我不仅对电力电子的理论知识有了很深的认识也对我的实践动手能力有了很大的培养。
当然这次设计还有很多不足之处,例如对基础知识了解不够充分,导致设计过程中出现很多不必要的麻烦,所以在以后的学习构成中我会加倍学习相关知识,以弥补自己的不足。
参考文献
[1]汤蕴璆.电机学(第四版) [M].北京:机械工业出版社,2011
[2]洪乃刚.电力电子、电机控制系统的建模与仿真 [M].北京:机械工业出版社,2010 [4]韩松.基于MATLAB的直流电动机启动的仿真研究[D].黑龙江:绥化学院,2011
课程设计成绩评定表。