算法合集之《SPFA算法的优化及应用》
- 格式:pdf
- 大小:525.05 KB
- 文档页数:37
一种SPF计算调度算法的设计与实现
平骁卓;葛宝忠
【期刊名称】《微计算机信息》
【年(卷),期】2005(000)024
【摘要】传统的OSPF路由协议实现满足SPF计算条件,就执行SPF计算:频繁的计算消耗大量宝贵的系统资源,还使计算得出的路由表稳定性较差.设计并实现对SPF计算的调度算法,保证两次SPF计算满足合理的间隔,提高单次SPF计算的效率,减缓了路由表更新的速率,提高了路由稳定性,节约了大量的系统开销.在T比特路由器平台上进行了测试验证,结果表明该算法达到设计目的.分析指出该算法也很好的满足了SPF计算的可靠性和健壮性要求.
【总页数】4页(P61-63,146)
【作者】平骁卓;葛宝忠
【作者单位】450002,郑州国家数字交换系统工程技术研究中心;450002,郑州国家数字交换系统工程技术研究中心
【正文语种】中文
【中图分类】TP393.17
【相关文献】
1.一种改进的进程调度算法在机顶盒上的设计与实现 [J], 王铭伟;吕华
2.ASPFQ:一种简单公平的队列调度算法 [J], 时培昕;柴洪杰;雷振明
3.一种多用户MapReduce集群的作业调度算法的设计与实现 [J], 王凯;吴泉源;
杨树强
4.一种SPF计算调度算法的设计与实现 [J], 平骁卓;葛宝忠
5.一种多核混合分区调度算法设计与实现 [J], 郝继锋;虞保忠;周霆;徐晓光
因版权原因,仅展示原文概要,查看原文内容请购买。

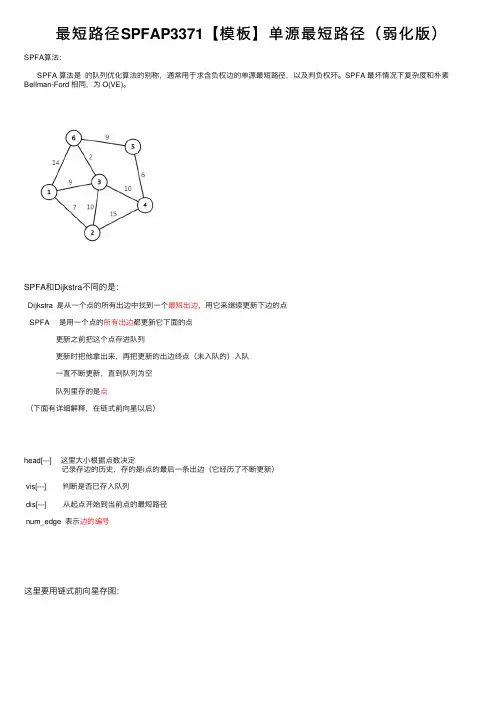
最短路径SPFAP3371【模板】单源最短路径(弱化版)SPFA算法:SPFA 算法是的队列优化算法的别称,通常⽤于求含负权边的单源最短路径,以及判负权环。
SPFA 最坏情况下复杂度和朴素Bellman-Ford 相同,为 O(VE)。
SPFA和Dijkstra不同的是:Dijkstra 是从⼀个点的所有出边中找到⼀个最短出边,⽤它来继续更新下边的点SPFA 是⽤⼀个点的所有出边都更新它下⾯的点更新之前把这个点存进队列更新时把他拿出来,再把更新的出边终点(未⼊队的)⼊队⼀直不断更新,直到队列为空队列⾥存的是点(下⾯有详细解释,在链式前向星以后)head[---] 这⾥⼤⼩根据点数决定记录存边的历史,存的是i点的最后⼀条出边(它经历了不断更新)vis[---] 判断是否已存⼊队列dis[---] 从起点开始到当前点的最短路径num_edge 表⽰边的编号这⾥要⽤链式前向星存图://以下为链式前向星存图void addedge(int from,int to,int dis) //存储每⼀条边:起点,终点,长度{num_edge++; //新建⼀条边edge[num_edge].next=head[from]; //上⼀条出边edge[num_edge].to=to;edge[num_edge].dis=dis;head[from]=num_edge; //记录最后⼀条出边}这⾥edge[1]=0,因为它是顶点1的第⼀条出边edge[2]=1,edge[3]=2,edge[5]=0,因为它是顶点5 的第⼀条出边edge[7]=5SPFA默认起点是1⽤到1就把它弹出再⽤6更新5⼊队再⽤3更新直到队列为空【代码】:#include<bits/stdc++.h>#include<queue>using namespace std;const int inf=2147483647;int n,m,s;int dis[10008],vis[10008],head[10008],num_edge;struct Edge{int next,to,dis;}edge[500008]; //⼤⼩由边数决定// to ⽬标点// dis 权值// next 该点的上⼀条出边queue<int>q;//以下为链式前向星存图void addedge(int from,int to,int dis) //存储每⼀条边:起点,终点,长度{num_edge++; //新建⼀条边edge[num_edge].next=head[from]; //上⼀条出边edge[num_edge].to=to;edge[num_edge].dis=dis;head[from]=num_edge; //记录最后⼀条出边}void spfa(){for(int i=1;i<=n;i++){dis[i]=inf; //初始化最⼤值vis[i]=0; //都不⼊队}dis[s]=0;vis[s]=1;q.push(s); //把起点S⼊队while(!q.empty()){int u=q.front(); //当前起点q.pop(); //⽤就弹出vis[u]=0; //弹出后记录为不在队列for(int i=head[u];i;i=edge[i].next) //遍历起点的所有出边{int v=edge[i].to; //当前终点if(dis[v]>dis[u]+edge[i].dis)//如果【起点到当前终点的距离】>【起点到当前起点的距离+当前距离与当前终点距离】 //那就更新为更⼩距离{dis[v]=dis[u]+edge[i].dis;if(!vis[v]) //未⼊队的当前终点⼊队 {q.push(v);vis[v]=1;}}}}}int main(){scanf("%d%d%d",&n,&m,&s);for(int i=1;i<=m;i++){int u,v,w;scanf("%d%d%d",&u,&v,&w);addedge(u,v,w);}spfa();for(int i=1;i<=n;i++){if(i==s) printf("0 ");else printf("%d ",dis[i]);}return0;}。
FOA优化极限学习机算法及模型应用研究
潘华贤
【期刊名称】《微型电脑应用》
【年(卷),期】2024(40)3
【摘要】传统极限学习机算法输入权重和单元偏置是随机确定的,这会导致算法性能不高,因而采用果蝇优化算法进行优化。
分析了果蝇优化算法的流程,并和遗传算法、粒子群算法进行对比,通过求解Schaffer函数最优化问题验证了果蝇优化算法具有良好的优化性能。
在此基础上,将果蝇优化算法优化极限学习机,提出改进的极限学习机算法。
将改进极限学习机算法和极限学习机算法应用于化工企业竞争力预测中,结果表明,改进极限学习机算法对化工企业竞争力预测的准确率明显高于极限学习机算法,同时运行时间相差非常小。
FOA优化极限学习机模型对其他预测问题的解决提供了参考。
【总页数】4页(P108-111)
【作者】潘华贤
【作者单位】西安财经大学行知学院
【正文语种】中文
【中图分类】TP18
【相关文献】
1.基于蚁群算法和极限学习机的舰船电子装备备件优化模型
2.基于相空间重构和遗传算法优化的极限学习机模型预测基坑变形时序混沌特性
3.基于改进SSA算法优
化极限学习机模型的土壤供肥量预测4.基于小波包分解-非洲秃鹫优化算法-深度极限学习机的水文预报模型及其应用5.基于混沌多目标蚁狮优化算法和核极限学习机的冲击性负荷预测模型
因版权原因,仅展示原文概要,查看原文内容请购买。
算法合集之《SPFA算法的优化及应用》SPFA算法即最短路径快速算法(Shortest Path Faster Algorithm)。
它是Bellman-Ford算法的一种优化算法,主要用于求解单源最短路径问题,即从一个节点出发,求解到达其他节点的最短路径。
SPFA算法的基本思想是利用队列进行松弛操作,不断更新节点的距离值,直到所有节点的距离值不再更新。
与普通的队列实现不同,SPFA算法通过维护一个优化队列,将已经被更新的节点推入队列的前部,这样可以提高算法的效率。
SPFA算法的优化主要体现在以下几个方面:1.队列优化:SPFA算法通过优化队列的维护顺序,将已经被更新的节点推入队列的前部。
这样,被更新的节点会尽快参与下一次的松弛操作,从而减少了不必要的松弛操作,提高了算法的效率。
2.标记优化:SPFA算法引入了一个标记数组,用于标记节点是否在队列中。
只有当节点的距离值发生改变时,才会将节点推入队列,并将其标记为在队列中。
这样可以避免重复将相同节点推入队列,减少了不必要的操作。
3.最短路径优化:SPFA算法在每次松弛操作时,会检查节点的距离值是否发生了改变。
如果节点的距离值没有发生改变,则说明该节点的最短路径已经确定,不需要再进行松弛操作。
这样可以减少不必要的松弛操作,提高算法的效率。
SPFA算法的应用非常广泛,主要应用在网络最短路径问题、有向图中的单源最短路径问题等。
具体应用如下所示:1.网络路由:SPFA算法可以用于求解网络中的最短路径,用于确定数据包的传输路径,从而提高网络的传输效率。
2.电力传输:SPFA算法可以用于求解电力网络中的最短路径,用于确定电力传输的路径,从而提高电力传输的效率。
3.交通规划:SPFA算法可以用于求解交通网络中的最短路径,用于规划最短的驾驶路线,从而减少交通拥堵,提高交通的效率。
总之,SPFA算法通过队列优化、标记优化以及最短路径优化,提高了算法的效率,使得求解最短路径问题更加快速和高效。
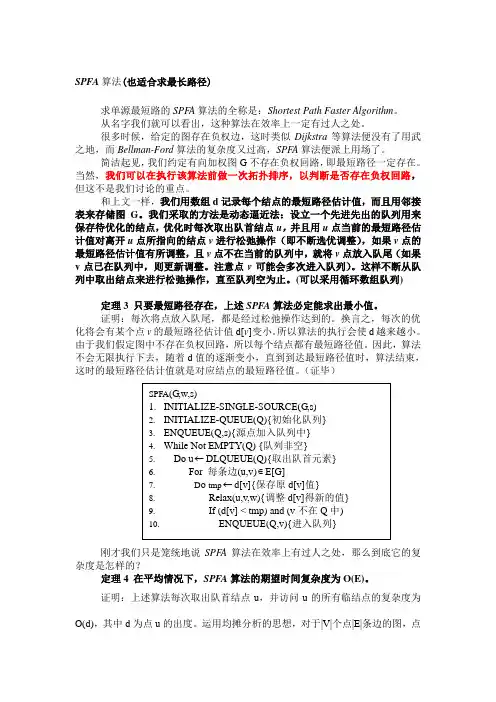
SPFA 算法(也适合求最长路径)求单源最短路的SPF A 算法的全称是:Shortest Path Faster Algorithm 。
从名字我们就可以看出,这种算法在效率上一定有过人之处。
很多时候,给定的图存在负权边,这时类似Dijkstra 等算法便没有了用武之地,而Bellman-Ford 算法的复杂度又过高,SPF A 算法便派上用场了。
简洁起见,我们约定有向加权图G 不存在负权回路,即最短路径一定存在。
当然,我们可以在执行该算法前做一次拓扑排序,以判断是否存在负权回路,但这不是我们讨论的重点。
和上文一样,我们用数组d 记录每个结点的最短路径估计值,而且用邻接表来存储图G 。
我们采取的方法是动态逼近法:设立一个先进先出的队列用来保存待优化的结点,优化时每次取出队首结点u ,并且用u 点当前的最短路径估计值对离开u 点所指向的结点v 进行松弛操作(即不断选优调整),如果v 点的最短路径估计值有所调整,且v 点不在当前的队列中,就将v 点放入队尾(如果v 点已在队列中,则更新调整。
注意点v 可能会多次进入队列)。
这样不断从队列中取出结点来进行松弛操作,直至队列空为止。
(可以采用循环数组队列)定理3 只要最短路径存在,上述SPFA 算法必定能求出最小值。
证明:每次将点放入队尾,都是经过松弛操作达到的。
换言之,每次的优化将会有某个点v 的最短路径估计值d[v ]变小。
所以算法的执行会使d 越来越小。
由于我们假定图中不存在负权回路,所以每个结点都有最短路径值。
因此,算法不会无限执行下去,随着d 值的逐渐变小,直到到达最短路径值时,算法结束,这时的最短路径估计值就是对应结点的最短路径值。
(证毕)刚才我们只是笼统地说SPF A 算法在效率上有过人之处,那么到底它的复杂度是怎样的?定理4 在平均情况下,SPFA 算法的期望时间复杂度为O(E)。
证明:上述算法每次取出队首结点u ,并访问u 的所有临结点的复杂度为O(d),其中d 为点u 的出度。
平滑改进A*算法在无人机航迹规划中的应用作者:储泽楠赵凯宋倍倍来源:《计算机时代》2020年第02期摘要:传统的A*算法易于陷入局部极小,搜索速度較慢,规划的路径有较多折线。
文章对传统A*算法进行了两个改进,并将其应用于无人机航迹规划。
一是在代价函数中加入无人机的转向代价估计,稳定其飞行方向;二是采用后处理方法对航迹点进行拟合,获得平滑的最短路径曲线。
为保证拟合后的路径不会出现较大波动,拟合过程没有使用所有的航迹点,而是在一定的误差允许范围内选取特征点进行拟合。
改进算法的有效性通过仿真和实验予以验证。
关键词: A*算法; 曲线拟合; 无人机; 后处理中图分类号:TP399 文献标识码:A 文章编号:1006-8228(2020)02-54-04Application of smooth improved A-star algorithm in UAV flight path planningChu Zenan1, Zhao Kai1, Song Beibei2(1.Anyang Institute of Technology, 2.Anyang Quality and Technical Supervision,Inspection and Testing Center, Anyang, Henan 455000, China)Abstract: Traditional A-star algorithm spends much time on searching optimal solution, and is easy to fall into local minima. Moreover, the planned path contains many polygonal lines. In this paper, two improvements are made to the traditional A-star algorithm, and it is applied to the pathplanning of UAV. One is to add the UAV steering cost estimation to the distance cost function to stabilize its flight direction; the other is to use the post processing method to fit the track points to obtain the smooth shortest path curve. In order to ensure that the fitted path will not fluctuate greatly, the fitting process does not use all the track points, but selects the feature points for fitting within a certain range of allowable error. The effectiveness of the improved algorithm is verified by simulation and experiment.Key words: A-star algorithm; curve fitting; unmanned aerial vehicle; post processing method 0 引言A*算法结构简单,易于执行,受到了人们的广泛关注。
SPF算法南华⼤学计算机科学与技术学院实验报告(2016春季学年度)课程名称⽹络设备实验名称 OSPF协议原理姓名:谢华巧学号:20134360201专业:⽹络⼯程班级:02班地点:8教教师:夏⽯莹⼀、实验⽬的:通过实验对SPF算法原理、OSPF协议原理进⾏深刻的理解。
⼆、实验内容SPF算法原理SPF是Short Path First的缩写即最短路径优先,也称为Dijkstra算法,可以计算从某结点(如源结点u)到⽹络中其他所有结点的最低费⽤路径树。
Dijkstra算法是迭代算法,其性质是经过算法的第k次迭代后,可知道所有⽬的结点的最低费⽤路径,这些路径形成了⼀棵⽣成树。
算法原理:定义下列记号。
D(v):根据算法进⾏本次迭代,从源结点u到⽬的结点v的最低费⽤路径的费⽤。
p(v):沿着当前最低费⽤路径从源结点到⽬的结点v的前⼀结点(v的邻居)的路径。
N’:结点⼦集;如果从源结点到⽬的结点v的最低费⽤路径已知,则v在N’中。
该全局路由选择由⼀个初始化步骤和其后的循环组成。
循环执⾏的次数与⽹络中结点的个数相同。
在算法结束时,该算法会计算从源结点u到⽹络中其他所有结点的最短路径。
1.初始化2. N’={u}3. for所有结点v4. if v是u的邻居5. then D(v)=c(u,v);6. else D(v)=⽆穷⼤;7. Loop8. 找到不在N’中的w使D(w)为最⼩;9. 将w加进N’中;10. 对于每个不在N’中的邻居v更新D(v);11. D(v)=min(D(v)),D(w )+c(w,v));12. /* v的新的费⽤,或者是过去的费⽤,或者是到w的已知最低路径费⽤加上从w到v的费⽤*/13. Until N’=N;OSPF协议原理OSPF是open shortest path first的缩写,即开放式最短路径优先,它是⼀种⼴泛应⽤于因特⽹AS内部的路由选择协议。
作为⼀种路由选择协议,OSPF ⽤于将路由选择信息传递给组织⽹络中的所有路由器。
机器学习算法的应用与优化方法引言:机器学习算法是人工智能领域中的核心技术之一,它广泛应用于各个领域,如自然语言处理、图像识别、推荐系统等。
然而,要让机器学习算法发挥最大的效用,就需要进行优化和调整。
本文将介绍机器学习算法的应用领域,并探讨一些常用的优化方法。
一、机器学习算法的应用领域1. 自然语言处理机器学习算法在自然语言处理中得到广泛应用,如文本分类、情感分析、机器翻译等。
通过分析海量的文字语料库,机器学习算法可以学习到语言的规律和模式,从而提高自然语言处理的效果。
2. 图像识别图像识别是机器学习应用的另一个重要领域,包括人脸识别、物体检测和图像分割等。
通过训练机器学习模型,可以使计算机能够自动分析和理解图像,从而实现自动化的图像识别与处理。
3. 推荐系统推荐系统是电商和媒体领域必备的技术之一,它通过分析用户的历史行为和喜好,为用户提供个性化的推荐服务。
机器学习算法可以对用户行为进行建模,预测用户的偏好,从而实现准确的推荐。
二、机器学习算法的优化方法1. 特征选择特征选择是机器学习算法优化的重要环节,它可以帮助剔除无关特征和噪声,提取最相关的特征。
常用的特征选择方法包括过滤式、包裹式和嵌入式等。
2. 数据预处理数据预处理是机器学习算法应用中不可或缺的环节,它包括数据清洗、特征归一化、缺失值处理等。
通过对数据预处理,可以提高模型的稳定性和准确性。
3. 算法调参机器学习算法有许多参数需要进行调整,通过优化算法的参数,可以提高模型的性能。
常用的调参方法有网格搜索、随机搜索和贝叶斯优化等。
4. 模型集成模型集成是一种常用的机器学习算法优化方法,它通过将多个模型的预测结果进行组合,得到更准确的综合预测。
常用的模型集成方法包括投票法、堆叠法和提升法等。
结论:机器学习算法的应用广泛,并且有许多优化方法可以提高其性能。
通过对算法进行特征选择、数据预处理、算法调参和模型集成,可以使机器学习算法更加适应不同领域的需求。
实例解析Bellman-ford和Spfa算法作者:周鑫张晶来源:《电脑知识与技术》2021年第30期摘要:Bellman-ford和Spfa是解決最短路问题的基本算法,是信息学奥赛教学的基本内容。
由于算法抽象性和逻辑性强,教学过程中学生对其基本原理、实现过程理解困难,导致无法灵活运用解决问题。
该文旨在用具体实例结合图表对算法执行过程进行详细解析,深刻剖析了算法的优化原理,有效解决了学生理解和应用困难的问题。
关键词:Bellman-ford;Spfa;算法解析中图分类号:TP312 文献标识码:A文章编号:1009-3044(2021)30-0079-03开放科学(资源服务)标识码(OSID):1 前言Bellman-Ford算法由查理德·贝尔曼和莱斯特·福特创立的,其基本思想是利用松弛原理反复对边集中的每条边进行松弛迭代操作,同时更新顶点集合中每个顶点的最短路径值并记录其最短路径上的前驱结点,达到收敛时停止迭代操作[1]。
由于反复对边集中的每条边进行松弛,因此产生了很多冗余的松弛操作,造成时间复杂度较高。
Spfa算法针对这一问题进行了优化,其核心思想是用FIFO队列保存已经被松弛过的顶点,只处理入队的顶点,并且不断迭代以求得最短路径。
因此,深刻理解Bellman-Ford算法有助于充分理解和应用Spfa算法解决实际问题[2]。
下面我们用具体实例来展开探讨这两个算法的实现过程。
例题:如图1所示,求1号顶点到其余各顶点的最短距离。
我们用d 数组记录起点到其余各点的最短路径值,用s、e、t三个数组来存储边的信息。
例如第i条边存储在s[i]、e[i]、t[i]中,表示从顶点s[i]到e[i]这条边的权值为t[i]。
给出边的顺序如下表:2 Bellman-Ford算法题解用d数组来存储1号顶点到其余各点的路径值。
初始化如下表:根据边给出的顺序,先处理第一条边“2-4-3”即判断一下d[4]是否大于d[2]+3,由于此时d[4]和d[2]都是无穷大,因此这条边松弛失败。
SPFA算法求单源最短路的SPFA算法的全称是:Shortest Path Faster Algorithm。
SPFA算法是西南交通大学段凡丁于1994年发表的.从名字我们就可以看出,这种算法在效率上一定有过人之处。
很多时候,给定的图存在负权边,这时类似Dijkstra等算法便没有了用武之地,而Bellman-Ford算法的复杂度又过高,SPFA算法便派上用场了。
简洁起见,我们约定有向加权图G不存在负权回路,即最短路径一定存在。
当然,我们可以在执行该算法前做一次拓扑排序,以判断是否存在负权回路,但这不是我们讨论的重点。
我们用数组d记录每个结点的最短路径估计值,而且用邻接表来存储图G。
我们采取的方法是动态逼近法:设立一个先进先出的队列用来保存待优化的结点,优化时每次取出队首结点u,并且用u点当前的最短路径估计值对离开u点所指向的结点v 进行松弛操作,如果v点的最短路径估计值有所调整,且v点不在当前的队列中,就将v点放入队尾。
这样不断从队列中取出结点来进行松弛操作,直至队列空为止。
定理: 只要最短路径存在,上述SPFA算法必定能求出最小值。
证明:每次将点放入队尾,都是经过松弛操作达到的。
(松弛操作的原理是著名的定理:“三角形两边之和大于第三边”,在信息学中我们叫它三角不等式。
所谓对i,j进行松弛,就是判定是否d[j]>d[i]+w[i,j],如果该式成立则将d[j]减小到d[i]+w[i,j],否则不动。
)换言之,每次的优化将会有某个点v的最短路径估计值d[v]变小。
所以算法的执行会使d越来越小。
由于我们假定图中不存在负权回路,所以每个结点都有最短路径值。
因此,算法不会无限执行下去,随着d值的逐渐变小,直到到达最短路径值时,算法结束,这时的最短路径估计值就是对应结点的最短路径值。
(证毕)期望的时间复杂度O(ke),其中k为所有顶点进队的平均次数,可以证明k一般小于等于2。
实现方法:建立一个队列,初始时队列里只有起始点,在建立一个表格记录起始点到所有点的最短路径(该表格的初始值要赋为极大值,该点到他本身的路径赋为0)。
算法优化技巧及实战应用随着科技的不断发展,算法优化成为了各行各业中不可或缺的一环。
无论是在金融领域、医疗行业还是智能交通等领域,算法优化都扮演着重要的角色。
本文将探讨一些常用的算法优化技巧,并结合实战案例进行应用。
一、贪心算法贪心算法是一种常用的算法优化技巧,它通过每一步选择局部最优解来达到全局最优解。
贪心算法的核心思想是,在每一步都做出当前看起来最好的选择,而不考虑未来的后果。
以背包问题为例,假设有一个背包,容量为C,有n个物品,每个物品有重量wi和价值vi。
我们的目标是在不超过背包容量的前提下,选取物品使得总价值最大。
贪心算法可以通过以下步骤来解决这个问题:1. 计算每个物品的单位重量价值:vi/wi。
2. 按照单位重量价值从大到小的顺序对物品进行排序。
3. 从价值最高的物品开始,依次将物品放入背包直至背包装满或物品放完。
贪心算法在解决背包问题时,可以得到一个近似最优解。
然而,在某些情况下,贪心算法并不能得到全局最优解,因为它只考虑了当前步骤的最优解,而忽略了后续步骤的影响。
二、动态规划动态规划是一种常用的算法优化技巧,它通过将问题分解为子问题,并保存子问题的解来避免重复计算,从而提高算法的效率。
以斐波那契数列为例,斐波那契数列的定义是:F(0) = 0,F(1) = 1,F(n) = F(n-1) + F(n-2)(n>=2)。
使用递归的方式计算斐波那契数列的第n项会存在大量的重复计算,导致算法效率低下。
而使用动态规划可以避免这种重复计算的问题。
动态规划解决斐波那契数列的步骤如下:1. 创建一个数组dp,用于保存计算过的斐波那契数列的值。
2. 初始化dp[0] = 0,dp[1] = 1。
3. 从dp[2]开始,通过dp[i] = dp[i-1] + dp[i-2]计算斐波那契数列的值。
通过使用动态规划,可以大大提高斐波那契数列的计算效率。
三、遗传算法遗传算法是一种模拟自然进化的优化算法,它通过模拟自然界中的遗传、变异和选择等过程来搜索最优解。
本文来源:/zgmf_x20a/ Beetlebum的Blog最短路径之 SPFA算法求最短路径的算法有许多种,除了排序外,恐怕是OI界中解决同一类问题算法最多的了。
最熟悉的无疑是Dijkstra,接着是Bellman- Ford,它们都可以求出由一个源点向其他各点的最短路径;如果我们想要求出每一对顶点之间的最短路径的话,还可以用Floyd-Warshall。
SPFA是这篇日志要写的一种算法,它的性能非常好,代码实现也并不复杂。
特别是当图的规模大,用邻接矩阵存不下的时候,用SPFA则可以很方便地面对临接表。
每个人都写过广搜,SPFA的实现和广搜非常相似。
如何求得最短路径的长度值?首先说明,SPFA是一种单源最短路径算法,所以以下所说的“某点的最短路径长度”,指的是“某点到源点的最短路径长度”。
我们记源点为S,由源点到达点i的“当前最短路径”为D[i],开始时将所有D[i]初始化为无穷大,D[S]则初始化为0。
算法所要做的,就是在运行过程中,不断尝试减小D[]数组的元素,最终将其中每一个元素减小到实际的最短路径。
过程中,我们要维护一个队列,开始时将源点置于队首,然后反复进行这样的操作,直到队列为空:(1)从队首取出一个结点u,扫描所有由u结点可以一步到达的结点,具体的扫描过程,随存储方式的不同而不同;(2)一旦发现有这样一个结点,记为v,满足D[v] > D[u] + w(u, v),则将D[v]的值减小,减小到和D[u] + w(u, v)相等。
其中,w(u, v)为图中的边u-v的长度,由于u-v必相邻,所以这个长度一定已知(不然我们得到的也不叫一个完整的图);这种操作叫做松弛。
引用内容松弛操作的原理是著名的定理:“三角形两边之和大于第三边”,在信息学中我们叫它三角不等式。
所谓对i,j进行松弛,就是判定是否d[j]>d[i]+w[i,j],如果该式成立则将d[j]减小到d[i]+w[i,j],否则不动。
算法优化在数据处理中的应用一、引言在信息时代,数据处理已成为各行各业都必备的技能与手段。
尤其是在大数据时代,数据体量的增长与复杂度的提高,给数据处理带来了前所未有的挑战。
此时,优秀的算法优化技术就显得至关重要。
算法优化技术不仅能提高数据处理的效率和准确度,还能为数据分析提供支持。
本文将从算法的角度探讨算法优化在数据处理中的应用。
二、算法概述算法是一系列执行特定任务的有序步骤。
它是计算机科学的基础,也是数据处理领域中最重要的技术之一。
它不仅能够针对特定类型的问题提高解决方案的效率,而且还可以随着问题规模的增大而扩展。
例如,冒泡排序算法就是一种非常基础的算法,它的基本思想是将相邻的元素进行比较并交换顺序。
虽然这种算法的效率不高,但对于小规模数据排序而言,它仍然是一种不错的选择。
三、算法优化简介算法优化是将算法进行改进,使其能在特定条件下更快或更准确地解决问题。
优化算法可以从多个角度出发。
例如,通过改变算法的循环次数、空间占用以及内存使用方式等来提高算法的效率。
还可以通过平衡算法的性能和准确度来增加算法的适用性。
四、算法优化在数据处理中的应用4.1 数据压缩在数据处理中,数据压缩是一项经常需要进行的工作。
数据压缩可以通过各种算法来实现,包括哈夫曼编码、算术编码、循环移位码、波暴式编码等。
这些算法的优雅还原、灵活性和适应性可以为处理和处理大量数据提供帮助。
4.2 图像处理在图像处理中,算法优化的最终目标是能够更准确地提取出所需要的图像信息,并消除目标图像中的噪点和干扰。
为此,有多种算法应用于图像处理领域,例如:卷积神经网络、支持向量机、深度学习等。
4.3 数据挖掘在数据挖掘中,算法优化可以用来降低误差和准确地预测结果。
常用的算法优化技术包括:线性判别分析、主成分分析、因子分析、社区发现等。
这些技术可以帮助数据分析师快速有效地对数据进行处理和分析,提高数据分析的效率和准确性。
4.4 自然语言处理在自然语言处理中,算法优化可以用于解决多种问题,例如词类标注、分词、机器翻译等。