AVR学习笔记十二、AVR内部的看门狗操作实验
- 格式:doc
- 大小:34.00 KB
- 文档页数:3
ARM实验姓名唐珊珊学号2011412614实验目的:掌握独立看门狗的工作原理和使用方法。
实验原理:调用固件库设置和初始化独立看门狗,通过Led4的状态指示系统运行,同时按下按键SW1不断重置看门狗寄存器(俗称喂狗),当停止按键后,,则MCU会在看门狗超时的作用下系统重启。
实验步骤:要实现本实验功能设计,需要进行必要的设置,其步骤如下:1)设置Led驱动管教为推挽输出,Sw1管脚为浮空输入。
2)Led4熄灭一下,以表示刚刚复位,3)调用IWDG_writeAccessCmd函数向IWDG_KR写入0X5555。
通过这步,我们取消看门狗寄存器的写保护。
4)设置看门狗的分频系数,本例中为32。
在固件库中,可以调用IWDG_SetPrescaler函数实现。
5)设置看门狗的重装载的值,本例中为625.在固件库中,可以调用IWDG_SetReload函数实现。
6)调用IWDG_Enable函数向IWDG_KR写入0xcccc。
通过这句,来启动STM32的看门狗。
7)检测按键Sw1,如果按下则调用IWDG_ReloadCounter函数使STM32重新加载IWDG_RlR的值到看门狗计数器里面。
也可以用该命令来喂狗。
程序为:独立看门狗#include "stm32f10x.h"void GPIO_Config(void);void delay(void);int main(void){GPIO_Config();GPIO_SetBits(GPIOC,GPIO_Pin_9);delay();GPIO_ResetBits(GPIOC,GPIO_Pin_9);IWDG_WriteAccessCmd(IWDG_WriteAccess_Enable);IWDG_SetPrescaler(IWDG_Prescaler_32);IWDG_SetReload(625);IWDG_Enable();while(1){if(GPIO_ReadInputDataBit(GPIOD,GPIO_Pin_3)==0)IWDG_ReloadCounter();}}void delay(void){uint32_t i;for(i=0;i<6000000;i++){}}void GPIO_Config(void){GPIO_InitTypeDef GPIO_InitStructure;RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOD|RCC_APB2Periph_GPIOC,ENA BLE);GPIO_InitStructure.GPIO_Pin=GPIO_Pin_9;GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;GPIO_InitStructure.GPIO_Mode=GPIO_Mode_Out_PP;GPIO_Init(GPIOC,&GPIO_InitStructure);GPIO_InitStructure.GPIO_Pin=GPIO_Pin_3;GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;GPIO_InitStructure.GPIO_Mode=GPIO_Mode_IN_FLOATING;GPIO_Init(GPIOD,&GPIO_InitStructure);}中断函数uint32_t led=1;void WWDG_IRQHandler(void){uint8_t cr;cr=WWDG->CR;cr&=0x7f;if(cr<0x50){WWDG_SetCounter(0x70);WWDG_ClearFlag();led=~led;if(led==0)GPIO_ResetBits(GPIOC,GPIO_Pin_9);elseGPIO_SetBits(GPIOC,GPIO_Pin_9);}}#include "stm32f10x.h"void GPIO_Config(void);void delay(void);//uint32_t led=0;int main(void){NVIC_InitTypeDef NVIC_InitStructure;GPIO_Config();GPIO_ResetBits(GPIOC,GPIO_Pin_9);delay();GPIO_SetBits(GPIOC,GPIO_Pin_9);delay();RCC_APB1PeriphClockCmd(RCC_APB1Periph_WWDG,ENABLE);WWDG_SetPrescaler(WWDG_Prescaler_8);WWDG_EnableIT();WWDG_SetWindowValue(0x50);WWDG_Enable(0x70);NVIC_InitStructure.NVIC_IRQChannel=WWDG_IRQn;NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=0x07; NVIC_InitStructure.NVIC_IRQChannelSubPriority=0x07;NVIC_InitStructure.NVIC_IRQChannelCmd=ENABLE;NVIC_Init(&NVIC_InitStructure);while(1){;}}void GPIO_Config(void){GPIO_InitTypeDef GPIO_InitStructure;RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOC,ENABLE);GPIO_InitStructure.GPIO_Pin=GPIO_Pin_9;GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;GPIO_InitStructure.GPIO_Mode=GPIO_Mode_Out_PP;GPIO_Init(GPIOC,&GPIO_InitStructure);}void delay(void){uint32_t i;for(i=0;i<6000000;i++){}}中断函数为void WWDG_IRQHandler(void){uint8_t cr;cr=WWDG->CR;cr&=0x7f;if(cr<0x50){WWDG_SetCounter(0x70);WWDG_ClearFlag();led=~led;if(led==0)GPIO_ResetBits(GPIOC,GPIO_Pin_9);elseGPIO_SetBits(GPIOC,GPIO_Pin_9);}}一秒定时看门狗#include "stm32f10x.h"void GPIO_Config(void);void NVIC_Config(void);void TIM1_Config(void);void EXTI_Config(void);void IWDG_Config(void);int main(){GPIO_Config();NVIC_Config();TIM1_Config();EXTI_Config();IWDG_Config();while(1){}}void GPIO_Config(void){GPIO_InitTypeDef GPIO_InitStructure;RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOC|RCC_APB2Periph_GPIOD,ENA BLE);GPIO_InitStructure.GPIO_Pin=GPIO_Pin_9;GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;GPIO_InitStructure.GPIO_Mode=GPIO_Mode_Out_PP;GPIO_Init(GPIOC,&GPIO_InitStructure);GPIO_InitStructure.GPIO_Pin = GPIO_Pin_3;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;GPIO_Init(GPIOD, &GPIO_InitStructure);}void NVIC_Config(void){NVIC_InitTypeDef NVIC_InitStructure;NVIC_InitStructure.NVIC_IRQChannel=TIM1_UP_IRQn;NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=0;NVIC_InitStructure.NVIC_IRQChannelSubPriority=1;NVIC_InitStructure.NVIC_IRQChannelCmd=ENABLE;NVIC_Init(&NVIC_InitStructure);NVIC_InitStructure.NVIC_IRQChannel = EXTI3_IRQn;NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0x07;NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0x07;NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;NVIC_Init(&NVIC_InitStructure);}void TIM1_Config(){TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;RCC_APB2PeriphClockCmd(RCC_APB2Periph_TIM1,ENABLE);TIM_TimeBaseInitStructure.TIM_ClockDivision=0;TIM_TimeBaseInitStructure.TIM_Period=(10000-1);TIM_TimeBaseInitStructure.TIM_Prescaler=(7200-1);TIM_TimeBaseInitStructure.TIM_CounterMode=TIM_CounterMode_Up;TIM_TimeBaseInitStructure.TIM_RepetitionCounter=0;TIM_TimeBaseInit(TIM1,&TIM_TimeBaseInitStructure);TIM_ClearITPendingBit(TIM1,TIM_IT_Update);TIM_ITConfig(TIM1,TIM_IT_Update,ENABLE);TIM_Cmd(TIM1,ENABLE);}void EXTI_Config(void){EXTI_InitTypeDef EXTI_InitStructure;RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO, ENABLE);GPIO_EXTILineConfig(GPIO_PortSourceGPIOD, GPIO_PinSource3);EXTI_InitStructure.EXTI_Line = EXTI_Line3;EXTI_InitStructure.EXTI_Mode = EXTI_Mode_Interrupt;EXTI_InitStructure.EXTI_Trigger = EXTI_Trigger_Falling;EXTI_InitStructure.EXTI_LineCmd = ENABLE;EXTI_Init(&EXTI_InitStructure);}void IWDG_Config(void){IWDG_WriteAccessCmd(IWDG_WriteAccess_Enable);IWDG_SetPrescaler(IWDG_Prescaler_32);IWDG_SetReload(4000);IWDG_Enable();}中端函数为int led=1;void TIM1_UP_IRQHandler(void){if(TIM_GetITStatus(TIM1,TIM_IT_Update)!=RESET){IWDG_ReloadCounter();led=~led;if(led==1)GPIO_SetBits(GPIOC,GPIO_Pin_9);elseGPIO_ResetBits(GPIOC,GPIO_Pin_9);TIM_ClearITPendingBit(TIM1,TIM_IT_Update);}}void EXTI3_IRQHandler(void){/* 检测EXTI3是否有效*/if(EXTI_GetITStatus(EXTI_Line3)!= RESET){while(1){/*可随便加入现象,便于观察*/GPIO_ResetBits(GPIOC,GPIO_Pin_9|GPIO_Pin_8|GPIO_Pin_7|GPIO_Pin_6);/* 清除EXTI3的悬起标志位*/EXTI_ClearITPendingBit(EXTI_Line3);}}}。
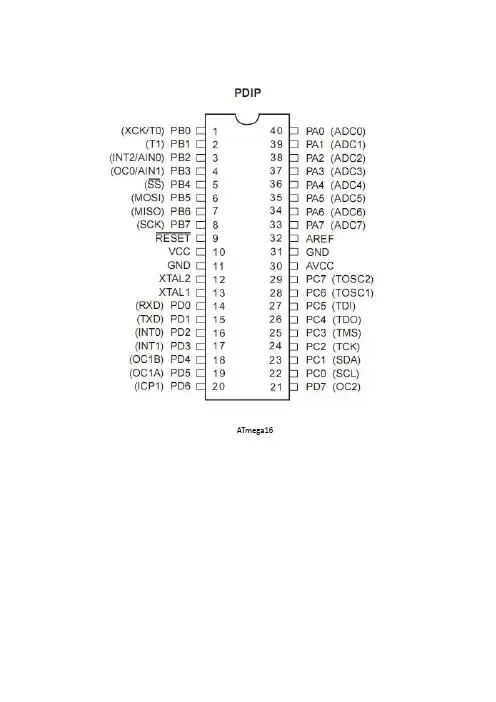
ATmega16中断表第一节课Avr单片机的每个引脚有三个寄存器来控制:DDRnx(输入输出控制寄存器1输出,0输入)PORTnx(引脚输出电平控制)PINnx(输入寄存器)第二节课AVR单片机的AD转换涉及寄存器:ADMUX sbit[7;6]参考电压选择,sbit[5] AD转换数据对齐方式选择,sbit[4:0]通道与增益选择;ADCSRA sbit[7]AD使能,sbit[6]AD开始转换,sbit[5]自动触发使能,sbit[4]AD 中断使能,sbit[3:0]分频设置;SFIOR(触发源的选择)sbit[7:5] (ADTS)选择触发源,ADCL,ADCH数据寄存器;初始化步骤:1:设置通道的IO口为输入(高阻);2:设置与AD有关的寄存器;3:开总中断,SREG=BIT(7);4:写中断函数(中断标号是15)第三节课AVR有三个定时计数器,T/C0,T/C1,T/C2;T/C0,T/C2是两个8BIT的计数器;T/C1定时计数器,普通模式时机寄存器:TCCR1B:2:0时钟选择TCNT1L,TCNTH:定时数据TIMSK :TOIE 中断使能位 使用方法1, 选择时钟源,TCCR1B ;2, 设计初值,TCNT1L ,TCNT1H ;3, 设置中断使能位;TIMSK{2},SREG{7} 4, 选中断号,写中断函数 5, (中断号9)CTC 模式如果输出波形,则设IO 位输出 设置波形模式和时钟源TCCR1B 设置输出模式TCCR1A根据需要设置上限OCR1ATCCR1A 设置输出口频率计算:()A OCR N ffclko112+∙∙=控制寄存器A TCCR1ACOM1A1:0: 通道A 的比较输出模式 COM1B1:0: 通道B 的比较输出模式COM1A1:0与COM1B1:0分别控制OC1A 与OC1B 状态。
如果COM1A1:0(COM1B1:0)的一位或两位 被写入"1”,OC1A(OC1B) 输出功能将取代I/O 端口功能。
第15章看门狗15.1概述接触过c51的朋友,对看门狗的概念应该不陌生吧?看门狗在某种程度上有软件复位的意义。
比起c51,AVR的看门狗更简单,而且很听话。
本章笔记可能会比较短,毕竟配置看门狗,就几个动作而已。
15.2关于看门狗的寄存器看门狗的操作其本上有"开狗","喂狗","关狗"这三个步骤。
开狗的意思是初始化看门狗并且使能它;喂狗的意思是复位看门狗;关狗动作就是不使能看门狗。
而配置看门狗的寄存器就只有一个而已。
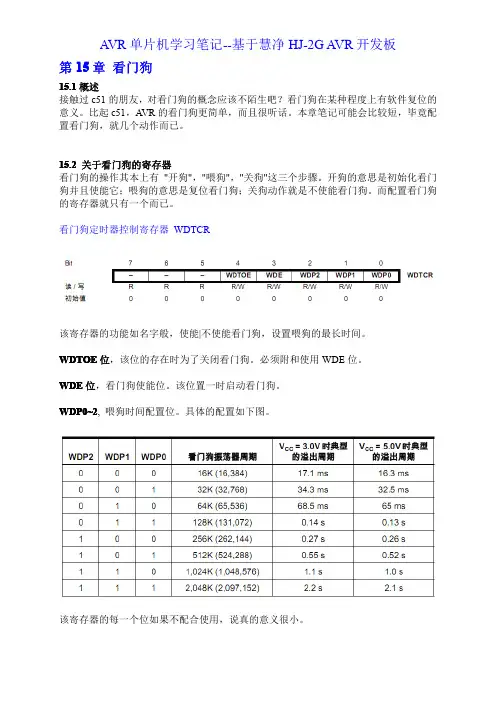
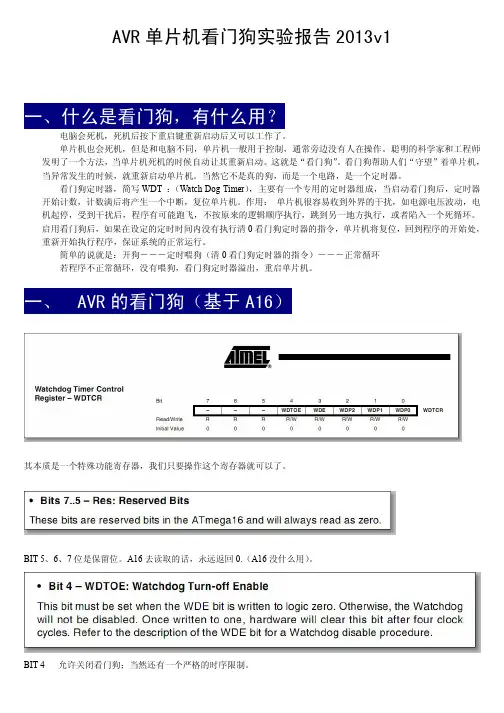
看门狗定时器控制寄存器WDTCR该寄存器的功能如名字般,使能|不使能看门狗,设置喂狗的最长时间。
WDTOE位,该位的存在时为了关闭看门狗。
必须附和使用WDE位。
WDE位,看门狗使能位。
该位置一时启动看门狗。
WDP0~2,喂狗时间配置位。
具体的配置如下图。
该寄存器的每一个位如果不配合使用,说真的意义很小。
15.3"开狗","喂狗","关狗""开狗"-启动看门狗的具体步骤如下:1.配置喂狗时间。
2.使能看门狗。
(以上的动作可以在一个指令完成)C语言的写法://看门狗启动函数void WDT_ON(){WDTCR=0x0f;//WDE=1-看门狗使能,WDP0:1:2=1:1:1-2秒喂狗。
}"关狗"-关闭看门狗的具体步骤如下:1.WDTOE位和WDE位同时置一。
2.WDE位置零。
C语言的写法://看门狗关闭函数void WDT_OFF(){WDTCR|=BIT(WDTOE)|BIT(WDE);//制造4个周期关闭时间WDTCR&=~BIT(WDE);//关闭看门狗}为什么关闭看门狗需要同时置一WDTOE和WDE位呢?具体我也不是很清楚,但是根据手册说:当WDTOE和WDE一同置一时,会产生4个有效的关闭周期。
如果在这四个周期内,将WDE位设置位0,那么久会成功关闭看门狗。

Proteus 环境下Avr I/O 电平反复变化(看门狗复位)
学习了一个月的avr 单片机了,从点亮一个二极管到通信部分,以前都是
直接上硬件,下载验证,昨天开始下载了Proteus 使用仿真,下载地址是verycd/topics/2733851/ 发现点亮一个简单的二极管都不成功,cvavr 下的程序如下:#include
void main()
{
DDRB=0XFF;
PORTB=0X00;
while(1);
}
然而就是这么简单的一个程序得到的仿真结果是:
一会高一会低,非常郁闷,学了这么长时间,居然让一个灯常亮都不行了于
是群里问可惜没人回答
终于,搜索中找到了以下是原文:
这个问题主要会出现在用CVAVR 来编译的程序中。
之前学AVR 有用到proteus 仿真,我用的是proteus7.4,拿一个ATMega16 出来,用AVR 编译出来的一些简单的程序,根本不能正常的运行,这把我搞
的相当的郁闷,后
来在仿真日志中发现原来是看门狗一直都开着,我又没喂狗,因此一直都把
处理器复位了,这回我更郁闷,我又没开看门狗,又没配置fuse,为什么自己
会开呢,搞了N 久后,发。
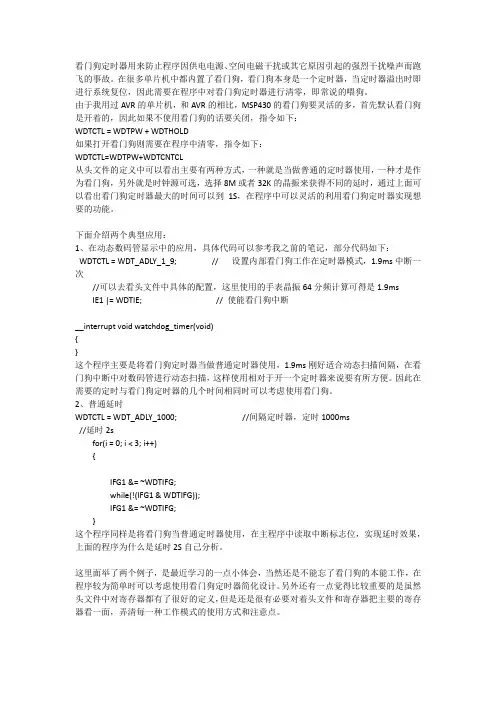
看门狗定时器用来防止程序因供电电源、空间电磁干扰或其它原因引起的强烈干扰噪声而跑飞的事故。
在很多单片机中都内置了看门狗,看门狗本身是一个定时器,当定时器溢出时即进行系统复位,因此需要在程序中对看门狗定时器进行清零,即常说的喂狗。
由于我用过AVR的单片机,和AVR的相比,MSP430的看门狗要灵活的多,首先默认看门狗是开着的,因此如果不使用看门狗的话要关闭,指令如下:WDTCTL = WDTPW + WDTHOLD如果打开看门狗则需要在程序中清零,指令如下:WDTCTL=WDTPW+WDTCNTCL从头文件的定义中可以看出主要有两种方式,一种就是当做普通的定时器使用,一种才是作为看门狗,另外就是时钟源可选,选择8M或者32K的晶振来获得不同的延时,通过上面可以看出看门狗定时器最大的时间可以到1S,在程序中可以灵活的利用看门狗定时器实现想要的功能。
下面介绍两个典型应用:1、在动态数码管显示中的应用,具体代码可以参考我之前的笔记,部分代码如下:WDTCTL = WDT_ADLY_1_9; // 设置内部看门狗工作在定时器模式,1.9ms中断一次//可以去看头文件中具体的配置,这里使用的手表晶振64分频计算可得是1.9msIE1 |= WDTIE; // 使能看门狗中断__interrupt void watchdog_timer(void){}这个程序主要是将看门狗定时器当做普通定时器使用,1.9ms刚好适合动态扫描间隔,在看门狗中断中对数码管进行动态扫描,这样使用相对于开一个定时器来说要有所方便。
因此在需要的定时与看门狗定时器的几个时间相同时可以考虑使用看门狗。
2、普通延时WDTCTL = WDT_ADLY_1000; //间隔定时器,定时1000ms//延时2sfor(i = 0; i< 3; i++){IFG1 &= ~WDTIFG;while(!(IFG1 & WDTIFG));IFG1 &= ~WDTIFG;}这个程序同样是将看门狗当普通定时器使用,在主程序中读取中断标志位,实现延时效果,上面的程序为什么是延时2S自己分析。


关于AVR单片机的看门狗看门狗这个东西以前没接触过理解它费了一点周折。
使用它的复位MCU 的功能实现LED 的闪烁。
准备工作是设定WDT 的超时时间(如1s)首先使能看门狗(wdt_enable),然后喂狗(wdt_reset),再延时灯的闪烁时间(delay=0.5s),使灯亮(SET_LED);再用一个恰当的比较长的延时(delay>0.5s)饿死狗。
之后MCU 重启,如此往复。
(1)延时可以调用库函数,还可以使用定时器;(2)SET_LED; while(1) wdt_reset(); 表示不断喂狗,从而不让MCU 重启,使灯一直亮着。
程序中使用这些代码的用途待考证,可以给作者发email 嘿嘿~(3)软件看门狗和硬件看门狗。
软件看门狗可以用wdt_disable 来禁掉。
而硬件看门狗不能。
AVR 可以通过修改熔丝位来分别实现软硬看门狗。
(4)wdt_enable(timeout)的参数timeout 表示看门狗的超时时间,即timeout时间内不喂狗,狗就会叫,mcu 就会复位。
=================================================================================================#include#include#include#define uchar unsigned char#define uint unsigned int#define SET_LED PORTA&=0XFE //PA0 输出低电平,黄灯亮#define CLR_LED PORTA|=0X01//PA0 输出高电平,黄灯灭。
AVR 看门狗WDT程序点击: 215, 文章入库日期: 2008-06-19 01:02:43, 来源: 很多人喜欢养宠物狗,很多单片鸭大侠则喜欢养看门狗,如果您也希望搞条AVR的看门狗养养,很适合您。
养看门狗的用意,在于用它监控系统:在程序本该运行的地方喂狗,如果程序卡死或跑飞,行到那,那样狗没有被喂到,饿死了,控制器复位,得以重启从而进行控制。
本节演示功能:养一只AVR内部看门狗,及时喂狗,狗不饿死,AVR单片鸭不复位;不及时喂饿死了,AVR单片鸭就复位。
本节的程序设计较为简单,旨在给出养狗、喂狗,不让狗饿死的简单示例。
实际应用时考虑的要注意什么时候喂狗,放狗。
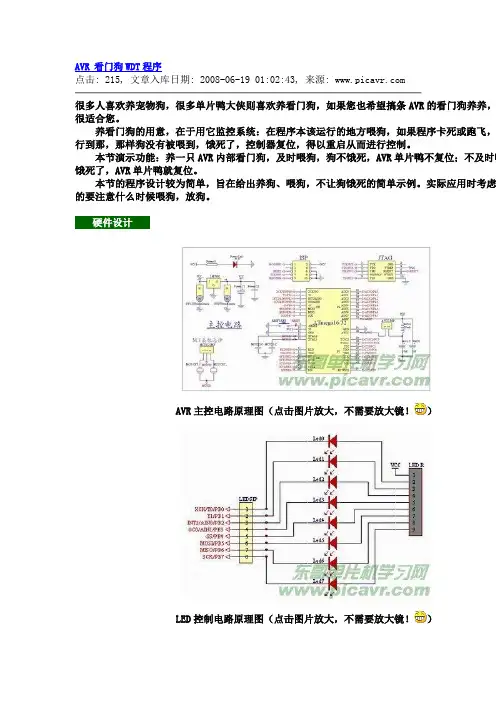
硬件设计AVR主控电路原理图(点击图片放大,不需要放大镜!)LED控制电路原理图(点击图片放大,不需要放大镜!)下面部分从TXT拷出,拷到网页,代码部分缺省了很多空格,比较凌乱,请谅解!//目标系统: 基于AVR单片机//应用软件: ICC AVR/*01010101010101010101010101010101010101010101010101010101010101010101----------------------------------------------------------------------实验内容:观察喂狗与不喂狗的区别,使用PB口的LED指示灯做状态指示。
----------------------------------------------------------------------硬件连接:将PB口的LED指示灯使能开关切换到"ON"状态。
----------------------------------------------------------------------注意事项:(1)若有加载库程序,请将光盘根目录下的“库程序”下的“ICC_H”文件夹拷到D盘(2)请详细阅读:光盘根目录下的“产品资料开发板实验板SMK系列SMK1632说明资料”---------------------------------------------------------------------- 10101010101010101010101010101010101010101010101010101010101010101010*/#include <iom16v.h>#include "D:ICC_HCmmICC.H"#define DISP_DDR DDRB#define DISP_PORT PORTB/*--------------------------------------------------------------------程序名称:看门狗WDT初始化程序程序功能:注意事项:提示说明:输入:返回:--------------------------------------------------------------------*/void wdt_init(void){asm("wdr"); //clr wdtWDTCR=0x0F; //enable wdt,clk = 2048,2.1S}/*--------------------------------------------------------------------程序名称:程序功能:注意事项:提示说明:输入:返回:--------------------------------------------------------------------*/void main(void){uint8 i;DISP_DDR = 0XFF;wdt_init();while(1){DISP_PORT++; //数据显示向上加,作AVR正常运行的指示asm("wdr"); //喂狗,去除此句将导致狗饿死,AVR复位delay50ms(20);}}在AVR的运行程序中设置让PB显示端口自加。
单片机看门狗(Watchdog)的工作原理及其应用2010年05月16日星期日 23:00在由单片机构成的微型计算机系统中,由于单片机的工作常常会受到来自外界电磁场的干扰,造成程序的跑飞,而陷入死循环。
程序的正常运行被打断,由单片机控制的系统无法继续工作,会造成整个系统的陷入停滞状态,发生不可预料的后果。
所以,出于对单片机运行状态进行实时监测的考虑,便产生了一种专门用于监测单片机程序运行状态的芯片,俗称"看门狗"(watchdog)。
看门狗电路的应用,使单片机可以在无人状态下实现连续工作,其工作原理是:看门狗芯片和单片机的一个I/O引脚相连,该I/O引脚通过程序控制它定时地往看门狗的这个引脚上送入高电平(或低电平),这一程序语句是分散地放在单片机其他控制语句中间的,一旦单片机由于干扰造成程序跑飞后而陷入某一程序段进入死循环状态时,写看门狗引脚的程序便不能被执行。
这个时候,看门狗电路就会由于得不到单片机送来的信号。
便在它和单片机复位引脚相连的引脚上送出一个复位信号。
使单片机发生复位,即程序从程序存储器的起始位置开始执行,这样便实现了单片机的自动复位。
看门狗,又叫 watchdog timer,是一个定时器电路。
一般有一个输入,叫喂狗(kicking the dog or service the dog),一个输出到MCU的RST端,MCU 正常工作的时候,每隔一端时间输出一个信号到喂狗端,给 WDT 清零。
如果超过规定的时间不喂狗,(一般在程序跑飞时),WDT 定时超过,就会给出一个复位信号到MCU,是MCU复位,防止MCU死机。
看门狗的作用就是防止程序发生死循环,或者说程序跑飞。
工作原理:在系统运行以后也就启动了看门狗的计数器,看门狗就开始自动计数,如果到了一定的时间还不去清看门狗,那么看门狗计数器就会溢出从而引起看门狗中断,造成系统复位。
所以,在使用有看门狗的芯片时要注意清看门狗。
AVR单片机看门狗范例GCCAVR WDR 复位检测和控制看门狗内容来源:OURAVR发布时间:[2010-10-28]查看次数:805/*************************************************** AVR 复位检测和控制看门狗的范例******* ******* 作者:HJJourAVR ******* 编译器:WINAVR20050214 ******* ******* 2005.9.28 **************************************************//*本程序简单的示范了AVRATMEGA16的复位检测和控制看门狗系统控制和复位复位来源的检测JTAG复位指示看门狗复位指示BOD复位指示RESET引脚复位指示上电复位指示看门狗的控制出于简化程序考虑,各种数据没有对外输出,学习时建议使用JTAG ICE硬件仿真器。
熔丝位设置1 使能BOD功能BODEN=02 选择BOD电平BODLEVEL=1 2.7V(VCC=3V) (可选)BODLEVEL=0 4.0V(VCC=5V) (可选)*/#include <avr/io.h>#include <avr/delay.h>//时钟定为内部RC 1MHz,F_CPU=1000000 也可以采用其他时钟#include <avr/wdt.h>/*wdt.h里面看门狗溢出时间常量定义#define WDTO_15MS 0#define WDTO_30MS 1#define WDTO_60MS 2#define WDTO_120MS 3#define WDTO_250MS 4#define WDTO_500MS 5#define WDTO_1S 6#define WDTO_2S 7下面的4S/8S定义只能用于 ATtiny2313, ATmega48, ATmega88 and the ATmega168.#define WDTO_4S 8#define WDTO_8S 9看门狗操作函数wdt_disable()关闭看门狗wdt_enable(timeout)使能看门狗及溢出时间设定wdt_reset()复位看门狗(喂狗)*///管脚定义#define WDT_EN 7 //PA7 看门狗的喂狗控制引脚// 高电平,不喂狗// 低电平,喂狗#define LED_JT 4 //PA4 JTAG复位指示#define LED_WD 3 //PA3 看门狗复位指示#define LED_BO 2 //PA2 BOD复位指示#define LED_EXT 1 //PA1 RESET引脚复位指示#define LED_PO 0 //PA0 上电复位指示//以上信号皆为低电平有效int main(void){unsigned char CPU_STATUS;unsigned char i;//上电默认DDRx=0x00,PORTx=0x00 输入,无上拉电阻PORTB=0xFF;//不用的管脚使能内部上拉电阻。
一、实训背景随着微电子技术的不断发展,单片机在各个领域的应用越来越广泛。
为了保证单片机系统在运行过程中不会因为软件错误、硬件故障或电磁干扰等原因导致系统崩溃,看门狗(Watchdog Timer,WDT)功能应运而生。
看门狗是一种用于监控程序运行状态的设备,当程序因错误而无法正常工作时,看门狗会自动复位系统,从而保证系统的稳定运行。
为了提高对看门狗功能的理解和应用能力,本次实训旨在通过实际操作,掌握看门狗功能的原理、设置方法以及在实际应用中的调试技巧。
二、实训目标1. 理解看门狗功能的原理及作用。
2. 掌握STM32单片机看门狗功能的配置方法。
3. 学会使用看门狗功能防止程序跑飞和死循环。
4. 掌握看门狗功能在实际应用中的调试技巧。
三、实训内容1. 看门狗功能原理及作用看门狗是一种定时器,用于监控程序运行状态。
当程序正常运行时,需要定期对看门狗进行喂狗操作,以防止看门狗超时。
如果看门狗超时,则认为程序出现错误,看门狗会自动复位系统,使程序重新开始执行。
2. STM32单片机看门狗功能配置(1)硬件电路:在STM32单片机中,看门狗功能主要由独立看门狗(IWDG)和窗口看门狗(WWDG)实现。
IWDG使用独立的RC振荡器工作,适用于对时间精度要求不高的场合;WWDG则要求在精确的计时窗口内起作用,主要用于需要精确控制时序的应用。
(2)软件配置:在STM32CubeMX中,可以通过以下步骤配置看门狗功能:① 打开STM32CubeMX软件,选择相应的STM32单片机型号。
② 在“System Core”选项卡中,勾选“IWDG”和“WWDG”选项。
③ 在“IWDG”选项卡中,设置预分频系数、重装值等参数。
④ 在“WWDG”选项卡中,设置预分频系数、重装值、窗口值等参数。
⑤ 生成代码,并在Keil uVision中编译、下载程序。
3. 使用看门狗功能防止程序跑飞和死循环(1)程序跑飞:当程序进入死循环时,看门狗会因未进行喂狗操作而超时,系统自动复位,从而避免程序跑飞。
AVR单片机的看门狗详解
AVR 看门狗一个硬件单元,当程序由于某种原因跑“飞”了,它就Reset 程序。
就像小狗看门一样。
//Watchdog initialize
// prescale: 2048K
void watchdog_init(void)
{
WDR(); //this prevents a timout on enabling
WDTCR = 0x0F; //WATCHDOG ENABLED - dont forget to issue WDRs
}
上面是用ICC 的App Builder 生成的看门狗初始化程序,这些语句达不到初始化看门狗的目的,需要在中间加一句WDTCR = 0x1F; 。
最后一行代码提醒狗主人,别忘了及时清零看门狗定时器(喂狗),否则,小狗就咬人了。
一个相对独立的计数自动重启单片机的硬件部件,如果启用它后,不在一定的时间内清除它的计数值,就会达到计数的最高值而溢出,然后它就指挥单片机重启。
所以要在你的程序里适当的加入清看门狗的指令,一旦你的单片机程序出了问题,当然就不能按照你的程序原先设定那样自动清看门狗了,也就是常说的程序跑飞了,这个时候看门狗就会重启单片机试图解决问题。
一般只对瞬间干扰造成的问题有效,要是长时间的干扰或是软硬件问题,看门狗的意义不是很大。
我的理解就象是监视程序执行的保安一样, 程序正常执行时会在他的益处时间之内给他一个复位信号,当程序跑飞的时候他在溢出时间之内是收不到复位信号的,这时看门狗就会在设定的时间内产生系统复位的信号!。
A VR教程系列一(12):ATmega16 简介(六) ATmega16 操纵与状态寄存器MCUCSRAVR 操纵与状态寄存器提供了有关引起AVR复位的复位源的信息。
Bit 4 – JTRF: JTAG 复位标志通过JTAG 指令AVR_RESET 能够使JTAG 复位寄存器置位,并引发MCU 复位,并使JTRF 置位。
上电复位将使其清零,也能够通过写”0” 来清除。
Bit 3 – WDRF: 看门狗复位标志看门狗复位发生时置位。
上电复位将使其清零,也能够通过写”0” 来清除。
Bit 2 – BORF: 掉电检测复位标志掉电检测复位发生时置位。
上电复位将使其清零,也能够通过写”0” 来清除。
Bit 1 – EXTRF: 外部复位标志外部复位发生时置位。
上电复位将使其清零,也能够通过写”0” 来清除。
Bit 0 – PORF: 上电复位标志上电复位发生时置位。
只能通过写”0” 来清除。
为了使用这些复位标志来识别复位条件,用户应该尽早读取此寄存器的数据,然后将其复位。
假如在其他复位发生之前将此寄存器复位,则后续复位源能够通过检查复位标志来熟悉。
ATmega16 基准电压使能信号与启动时间ATmega16 具有片内能隙基准源,用于掉电检测,或者者是作为模拟比较器或者ADC的输入。
ADC 的2.56V 基准电压由此片内能隙基准源产生。
电压基准的启动时间可能影响其工作方式。
启动时间列于Table 16。
为了降低功耗,能够操纵基准源仅在如下情况打开:1. BOD 使能 ( 熔丝位BODEN 被编程)2. 能隙基准源连接到模拟比较器(ACSR 寄存器的ACBG 置位)3. ADC 使能因此,当BOD 被禁止时,置位ACBG 或者使能ADC 后要启动基准源。
为了降低掉电模式的功耗,用户能够禁止上述三种条件,并在进入掉电模式之前关闭基准源。
ATmega16 看门狗定时器看门狗定时器由独立的1 Mhz 片内振荡器驱动。
21IC-AVR 学习笔记,AVR 单片机教程AVR 学习笔记一、基本输出实验(电路原理图)
本实验包括七个例程:1、点亮LED 试验,2、流水灯试验,3、蜂鸣器试验,4、1 位数码管显示试验,5、四位数码管显示试验,6、1602 液晶显示试验,7、12864 液晶显示实验。
AVR 学习笔记二、基本输入和外部中断实验
本实验包括二个例程:1、检测按键,实现按键控制LED 的亮灭,2、外部中断实验,利用中断检测按键,并在数码管上显示。
AVR 学习笔记三、定时记数器0 实验
本实验包括五个例程:1、定时/计数器0 的计数实验,2、定时/计数器0 的定时实验,3、定时/计数器0 的比较匹配(CTC)实验,4、定时/计数器0 的快速PWM 实验,5、定时/计数器0 的相位修正PWM 实验。
AVR 学习笔记四、定时记数器1 实验
由于在定时/计数器0 的实验中我们已经学会了定时/计数器的定时、计数、PWM 等基本功能的使用方法。
而单片机中的定时/计数器的基本功能大致上是一样的。
主要区别只是在于对不同寄存器的设置。
所以在定时/计数器1 的。
A VR学习笔记十二、A VR内部的看门狗操作实验
-------基于LT_Mini_M16
12.1 基于A Tmega16内部看门狗操作实验
12.1.1、实例功能
A VR单片机的多数型号都有芯片内置的看门狗(watch dog)电路,看门狗电路实际上是一个定时器电路,该定时器采用独立的内部1M的RC振荡器驱动。
根据设置的看门狗定时时间,当程序运行时间超过定时时间后,如果没有及时复位看门狗(就是俗称的“喂狗”),看门狗定时器就会发生溢出,这个溢出将导致程序的复位,从而保证在程序跑飞的情况下,不会长时间没有响应。
本实例就利用WINA VR中自带的看门狗的操作函数来对A Tmega16的内部看门狗进行操作。
本实例有两个功能模块:
●了解WINAVR自带的看门狗操作函数。
●编写程序,实现对ATmwga16内部口看门狗的操作。
通过本实例的学习,掌握以下知识点:
●如何利用WINA VR自带的看门狗操作函数实现对A Tmega16的内部看门狗的操作。
12.1.2 WINA VR中自带看门狗操作函数的说明
WINA VR中自带了看门狗操作函数,利用这些函数可以很轻松的实现对A VR单片机内部的看门狗进行控制。
如果要使用WINA VR中自带的看门狗操作函数,首先要在程序中包含看门狗操作函数的头文件,使用如下语句即可:
#include <avr/wdt.h>
下面我们来了解一下看门狗的操作常量的定义。
●复位看门狗定时器。
程序允许在使能看门狗定时器后,在溢出时间到达之前,调用该函数将看门狗复位。
如果在规定时间内不调用此函数,则会发生看门狗溢出,导致程序复位。
#define wdt_reset() _asm_ _volatile_(“dwr”)
●使能看门狗定时器,同时设置看门狗溢出时间
#define wdt_enable(timeout) _wdt_write((timeout) | _BV(WDE))
●关闭看门狗定时器
#define wdt_disable() _wdt_write(0)
●定义看门狗定时器溢出时间
#define WDTO_15MS 0
#define WDTO_30MS 1
#define WDTO_60MS 2
#define WDTO_120MS 3
#define WDTO_250MS 4
#define WDTO_500MS 5
#define WDTO_1S 6
#define WDTO_2S 7
12.1.3 电路和连接
本实例只是对A VR单片机内部看门狗定时器的操作。
没有用到任何外部电路(当然电源电路、复位电路、下载电路等构成单片机工作的最基本电路还是需要的。
^_^)。
12.1.4 程序设计
1、程序功能
程序的功能是对A Tmega16单片机的内部看门狗定时器操作,通过控制8个LED显示看门狗是否及时复位,程序比较简单,直接看程序就能明白原理了。
2函数说明
本程序主要使用的是WINA VR自带的EEPROM读写函数,前面已经介绍过,在此不再说明。
3、使用WINA VR开发环境,使用的是外部12M的晶振,所以需要将makefile文件中的时钟频率修改为12M。
另外在程序烧录到单片机的时候,熔丝位也要选择为外部12M晶振(注意是晶振,不是外部振荡器,一定不要选择错了,否则会导致单片机不能再烧写程序)。
4、程序代码
#include <avr/io.h> //io端口寄存器配置文件,必须包含
#include <util/delay.h>
#include <avr/wdt.h> //WINA VR自带的watch dog函数头文件
//函数声明
void Delayus(unsigned int lus); //us延时函数
void Delayms(unsigned int lms); //ms延时函数
int main(void) //GCC中main文件必须为返回整形值的函数,没有参数
{
wdt_enable(WDTO_500MS); //启动看门狗,定时时间500MS
PORTB = 0x00; //熄灭所有LED
DDRB = 0xFF; //端口PortB设为输出口,通过LED的变化指示看门狗的复位
Delayms(100); //延时
PORTB = 0xff; //点亮所有LED
Delayms(100); //延时
//由于看门狗使用的是内部独立的1MRC振荡器,因此定时器的时间与电源电压、环境
//温度有关,//定时时间可能不准。
//在本实验中使用的是外部12M晶振,实验过程中发现,如果上面两个延时程序都改
//成延时200MS, //则即使在下面设置了喂狗程序,程序还是会复位,而改成延时100MS,//则程序不会复位。
//这可能是看门狗定时不准的例证。
while(1)
{
wdt_reset();
//喂狗,让程序正常运行,即LED一直点亮,注意一定要在while(1)中喂狗
//如果屏蔽这句话,则看门狗定时时间到后,会让程序复位,LED会不停的
//亮灭变化,
}
}
//us级别的延时函数
void Delayus(unsigned int lus)
{
while(lus--)
{
_delay_loop_2(3); //_delay_loop_2(1)是延时4个时钟周期,参数为3则延时12
//个时钟周期,本实验用12M晶体,则12个时钟周期为12/12=1us }
}
//ms级别的延时函数
void Delayms(unsigned int lms)
{
while(lms--)
{
Delayus(1000); //延时1ms
}
}
//ms级别的延时函数
void Delayms(unsigned int lms)
{
while(lms--)
{
Delayus(1000); //延时1ms
}
}。