变步长的龙格库塔法
- 格式:ppt
- 大小:589.00 KB
- 文档页数:16
变步长ode23tb算法是一种用于解非刚性常微分方程初值问题的数值算法。
该算法由MathWorks公司的工程师开发,其特点是能够自适应调整步长以提高求解精度和效率。
ode23tb算法是ode23算法的改进版本,通过引入更高阶的解析技术和自适应的步长控制,使得求解过程更加可靠和高效。
二、算法原理ode23tb算法基于龙格-库塔(Runge-Kutta)方法,通过描述性的一阶创建步骤和更高阶的增补步骤来近似解微分方程。
算法会根据当前的解的精度和误差情况,自适应地调整步长以确保求解的精度和效率。
ode23tb算法还引入了自动时步的策略,以处理不同变化速度的微分方程。
三、算法特点1. 自适应调整步长:ode23tb算法能够根据当前解的情况实时调整步长,避免不必要的计算和提高求解效率。
2. 高阶解析技术:通过引入更高阶的解析技术,ode23tb算法能够更准确地近似微分方程的解,在不增加过多计算成本的情况下提高求解精度。
3. 自动时步策略:算法能够根据微分方程的变化速度自动调整时步,适应不同变化速度的微分方程的求解。
作为一种高效可靠的数值求解算法,ode23tb算法在科学计算、工程领域和其他需要求解微分方程的问题中得到了广泛的应用。
例如在控制系统的建模和仿真中,ode23tb算法能够准确地求解系统的状态方程,为系统性能分析提供有力的支持。
在生物医学领域,ode23tb算法被用于建立生物模型和仿真生物系统的动态行为。
ode23tb算法还被应用于气象学、天文学、材料科学等领域,为复杂的微分方程问题提供了强大的求解能力。
五、算法发展随着科学技术的发展和对求解微分方程精度和效率要求的不断提高,ode23tb算法也在不断地进行改进和优化。
未来的发展方向主要包括进一步提高算法的自适应调整能力,完善算法的并行计算和局部精度控制,以满足各种复杂微分方程求解问题的需求。
六、总结ode23tb算法作为一种自适应调整步长的高效数值求解算法,在科学计算和工程实践中发挥着重要作用。
数值解常微分方程的方法和技巧在科学和工程领域,我们经常遇到一些复杂的常微分方程(Ordinary Differential Equations, ODEs),这些方程往往很难用解析方法得到精确解。
而数值解常微分方程的方法和技巧提供了一种有效的途径来近似求解这些方程。
本文将介绍一些常用的数值解ODEs的方法和技巧。
一、欧拉方法(Euler Method)欧拉方法是最简单的数值解ODEs的方法,它利用初始条件和微分方程的导数来计算下一个点的近似值。
具体来说,假设我们要求解的ODE为dy/dx = f(x, y),其中f(x, y)是已知函数,初始条件为x0 = x(0),y0 = y(0)。
欧拉方法的迭代公式为:y[i+1] = y[i] + h * f(x[i], y[i])其中,h是步长,x[i]表示第i个点的x坐标,y[i]表示对应的y坐标。
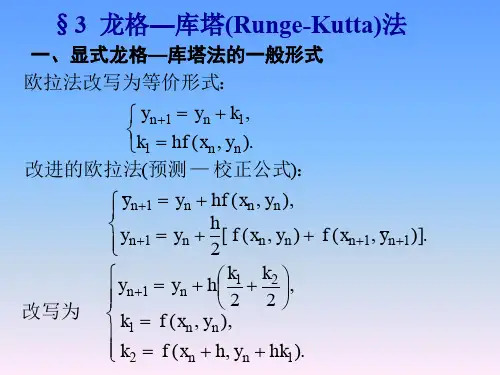
二、龙格-库塔方法(Runge-Kutta Method)龙格-库塔方法是一族常用的数值解ODEs方法,其基本思想是通过计算不同阶数的导数来提高求解的精度。
最常用的龙格-库塔方法是四阶龙格-库塔方法,也称为RK4方法。
它的迭代公式如下:k1 = h * f(x[i], y[i])k2 = h * f(x[i] + h/2, y[i] + k1/2)k3 = h * f(x[i] + h/2, y[i] + k2/2)k4 = h * f(x[i] + h, y[i] + k3)y[i+1] = y[i] + 1/6 * (k1 + 2*k2 + 2*k3 + k4)其中,k1、k2、k3、k4是中间变量,h是步长。
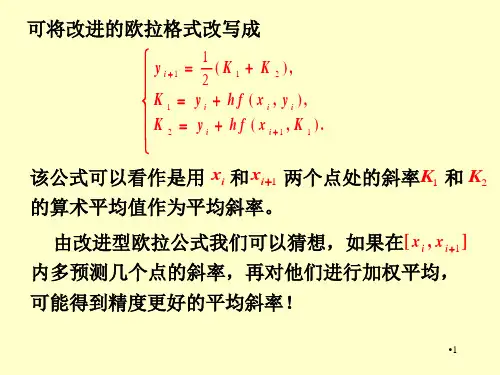
三、改进的欧拉方法(Improved Euler Method)改进的欧拉方法是对欧拉方法的改进,它通过使用导数的平均值来提高求解的精度。
其迭代公式为:k1 = h * f(x[i], y[i])k2 = h * f(x[i] + h, y[i] + k1)y[i+1] = y[i] + 1/2 * (k1 + k2)其中,k1、k2是中间变量,h是步长。
龙格库塔法龙格库塔法是常用于模拟常微分方程的解的重要的一类隐式或显式迭代法。
这些技术由数学家C. Runge和M.W. Kutta于1900年左右发明。
由于此算法精度高,采取措施对误差进行抑制,所以其实现原理也较复杂。
龙格库塔法是一种在工程上应用广泛的高精度单步算法,可以应用在物理、工程、控制、动力学中,如模糊控制、弹道分析以及分析光纤特性等,在系统仿真中得到广泛应用。
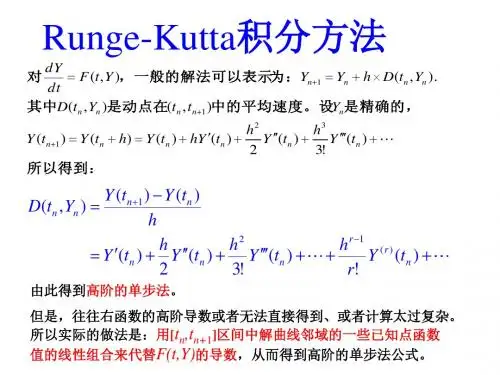
龙格库塔法源自于相应的泰勒级数方法,在每一插值节点用泰勒级数展开,其截断误差阶数也是,根据可省略更高阶的导数计算, 这种方法可构造任意阶数的龙格库塔法。
其中4 阶龙格库塔法是最常用的一种方法。
因为它相当精确、稳定、容易编程。
在计算中一般不必使用高阶方法, 因为附加的计算误差可由增加精度来弥补。
如果需要较高的精度, 可采取减小步长的方法即可。
4 阶龙格库塔法的精度类似4 阶泰勒级数法的精度。
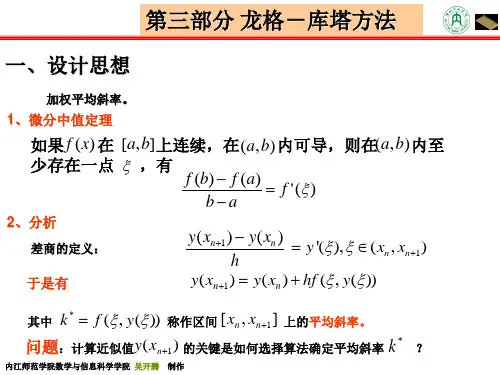
1、初值问题对于一阶常微分方程的初值问题根据常微分方程的理论可知,此初值问题的解在区间[a,b]上存在,且唯一。
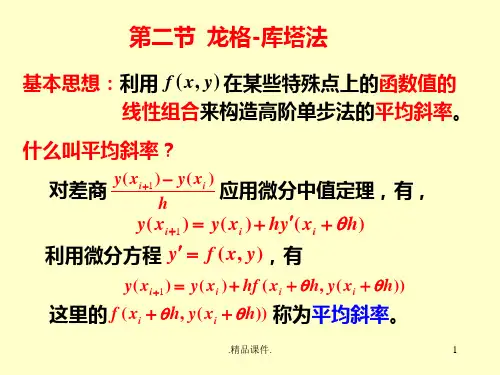
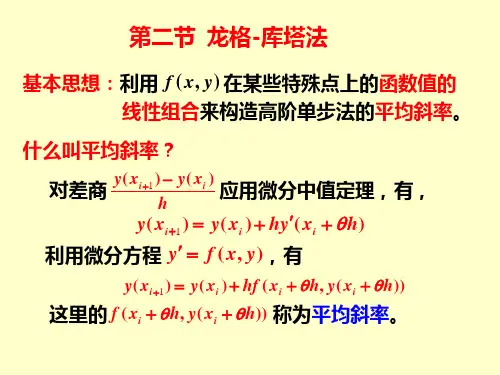
2、离散化取步长h=(b-a)/n,将区间[a , b]分成n个子区间:a=<=b在其中任意两点的曲线段上,根据积分中值定理,一段光滑曲线上至少有一点,它的斜率与整段曲线的平均斜率相同,得=y’() (0<<1)其中,=可以将上式改写成y()=y()+h*K (2.1)其中K为平均斜率,K=f()公式(2.1)表明,如果能够确定平均斜率K,就可以根据(2.1)式得到y()的值。
欧拉法和龙格库塔法就是用不同方法确定不同精度的平均斜率K,从而求得y()的近似值。
3、Euler法欧拉法虽然精度低,但它是最简单的一种显式单步法,也是龙格库塔法的基础。
首先,令、为y() 及y()的近似值,并且令平均斜率K=f(),即以点的斜率作为平均斜率K,便得到欧拉公式=+h* f() (3.1)4、改进的欧拉法此种方法是取、两点的斜率的平均值作为平均斜率K,即K= ,其中、均为y()以及y()的近似值,就得到改进后的欧拉公式(4.1)其中、分别为、两点的斜率值,即= ,=在上面的(4.1)式中,k2是未知的,采用一种叫预报法的方法来求解。
龙格库塔法的基本思想
龙格库塔法,又称拉格朗日-龙格-库塔(Rallgendre-Kutta)法,是由德国数学家拉格朗日于1867年和德国数学家库塔于1901年分别提出的数值解法,是一种用于解决初值问题的数值分析方法,是飞行器运动动力学中用于近似解微分方程的方法之一。
龙格库塔法的基本思想是:将积分分成多个小步,将每一步步长求解结果串联起来,从而求出整个时间轴上每一个点的解。
为了满足既定的精度要求,需要不断减小步长,从而增加划分的步数。
如果步长继续减小,微分方程求解速度会变慢很多,故使用龙格库塔方法可较快求解方程。
龙格库塔法的实际应用中,通常是把初值问题用一系列积分步骤替代,每个积分步骤用四阶龙格库塔公式来模拟,每一步的计算结果都有效,最后得到的结果都是基于此,因此更加稳定。
此外,每个积分步骤可以由四步单步计算得出,因此实现和追踪也很容易。
总而言之,龙格库塔法比其他方法计算更快、更准确,可以用于解决复杂的初值问题,近年来大受工业界的欢迎,形成了一种重要的数值解法。