加拿大机械臂2太空多面手十年传奇
- 格式:doc
- 大小:23.00 KB
- 文档页数:4
空间新技术试验卫星获首批科学成果
作者:
来源:《科技创新与品牌》2022年第09期
9月5日,科技日报消息称,经过一个月的在轨测试,中国科学院微小卫星创新院抓总研制的创新X系列首发星,即空间新技术试验卫星(SATech-01)工作正常,搭载的多个科学载荷按计划开展了测试,并获得首批科学成果。
SATech-01卫星搭载的伽马射线暴探测载荷(HEBS)已首次加电开始在轨测试。
在此期间,HEBS探测到其在轨运行以来的首个伽马暴,表明HEBS已经具备伽马暴的探测研究能力。
HEBS与我国前期发射运行的“慧眼”卫星和“怀柔一号”极目卫星已组成伽马射线爆发天体探测网络。
同时,SATech-01卫星搭载的龙虾眼宽视场X射线望远镜载荷成功获得一批天体的真实X射线实测图像和能谱,这是国际上首次獲得并公开发布的宽视场X射线聚焦成像天图。
不久的将来机器人在太空上行驶的职责说明空间机器人主要从事哪些职责?1、空间建筑与装配一些大型的安装部件,比如无线电天线,太阳能电池,各个舱段的组装等舱外活动都离不开空间机器人,机器人将承担各种搬运,各构件之间的连接紧固,有毒或危险品的处理等任务。
在不久的将来,人造空间站初期建造一半以上的工作都将由机器人完成。
2、航天器的维护与修理随着人类在太空活动的不断发展,人类在太空的"财产"也越来越多,在这些财产中人造卫星占了绝大多数。
如果这些卫星一旦发生故障,丢弃它们再发射新的卫星就很不经济,必须设法修理后使它们重新发挥作用。
但是如果派宇航员去修理,又牵涉到舱外活动的问题,而且由于航天器在太空中,是处于强烈宇宙辐射的环境之下,人根本无法执行任务,所以只能依靠机器人。
空间机器人所进行的维护和修理工作有回收失灵卫星,对故障卫星进行就地修理,为空间飞行器补给物资等。
3、空间生产和科学实验宇宙空间为人类提供了地面上无法实现的微重力和高真空环境,利用这一环境可以生产出地面上无法或难以生产出的产品。
在太空中还可以进行地面上不能做的科学实验。
和空间装配,空间修理不同,空间生产和科学实验主要在舱内环境里进行,操作内容多半是重复性动作,在多数情况下,宇航员可以直接检查和控制。
这时候的空间机器人如同工作在地面的工厂里的生产线上一样。
因此,可以采用的机器人多是通用型多功能机器人。
空间机器人在保证空间活动的安全性,提高生产效率和经济效益,扩大空间站的作用等方面都将发挥巨大的作用。
4、太空里的多面手它是一个运行在太空、拥有一定智能的,能够在空间自主逼近、绕飞、交汇、捕获合作目标和非合作目标卫星,可以对其进行修理、燃料补充、拆卸的太空机器人。
除了补给燃料外,空间机器人还可以对故障卫星进行修理,这就大大减少了重复发射卫星耗费的成本。
此外,拥有了自主捕获功能的空间机器人无疑还是一种进攻型武器,对敌国卫星捕获后使用武器或者机械臂进行破坏对毫无反抗之力的卫星来说是毁灭性的,而普通的反卫星武器虽然各国也进行过一些试验,实际上却只能对运行在低轨的卫星进行有限的攻击,远不能满足太空战的需求。
认识机器人相关内容以下是 8 条关于认识机器人的内容:1. 哎呀呀,机器人可真是神奇的存在呀!你看那工业生产线上忙碌的机械臂,不就像不知疲倦的钢铁战士吗?就说在汽车厂里,它们精准地焊接、装配,效率那叫一个高呀!这要是没有机器人,得需要多少人力呀!我们的生活不也越来越离不开机器人了吗?像家里的扫地机器人,自己乖乖地就把地扫干净了,多省心!2. 嘿,你想想,机器人不就像是我们的超级小助手吗?比如在医院里,那些能送药的机器人,多厉害呀!它们能快速准确地把药送到病人那里,这不就像有一双可靠的手在帮忙吗?还有啊,现在有些餐厅都用机器人上菜了呢,新奇吧!机器人真的在悄悄地改变我们的生活呢,你难道不觉得吗?3. 哇塞,机器人的发展简直超乎想象呀!它们有时候是不是像拥有魔法的小精灵呀?看那些能与人对话交流的智能机器人,那反应速度,跟人有得一拼呀!还记得有次我去参加科技展,有个机器人还跟我开玩笑呢,可有意思了!未来的机器人肯定还会有更惊人的本事,你说是不是呀?4. 哟呵,机器人可不是一般的厉害哟!可以类比成我们生活中的多面手呢。
在一些危险的地方,像火灾现场、核辐射区域,那些特种机器人就能冲进去,这不是大无畏的勇士吗?咱普通人可不敢去呀!而且现在机器人的学习能力也超强,感觉它们随时能超越我们呢,这可咋办呀?5. 哈哈,机器人可真是个奇妙的东西啊!不就像个万能宝贝嘛!你说在太空探索中,那些机器人探测器多重要呀!它们替我们去探索那些未知的世界,是不是超级勇敢?就像家里孩子喜欢的那个机器人玩具,也能带来好多欢乐呢!机器人的存在真的太有意思了,对吧?6. 哎呀,说到机器人,那可太有意思啦!它们不就像无声的工作者吗?在仓库里搬运货物的机器人,一趟趟地跑,多勤劳呀!我有次看到一个机器人在分拣邮件,速度快得惊人呢!要是光靠人,那得忙活多久呀!机器人真的给我们带来了巨大的便利呀,能不喜欢它们吗?7. 哇,机器人真的太让我惊讶啦!难道不像神秘的魔法师吗?在一些科研实验中,机器人能精准地操作仪器,这难道不是神乎其技吗?我朋友还跟我说,他去的那个工厂全是机器人在干活呢!那场面,可壮观了!机器人的世界真的很精彩,你难道不想去探索一下吗?8. 嘿嘿,机器人可是当今世界的大热点呀!不就如同我们的智能伙伴吗?想想那些陪伴老人和孩子的机器人,多温暖呀!有了它们,老人不孤单了,孩子也更开心了。
二自由度机械臂matlab二自由度机械臂是一种常见的工业机器人,它由两个旋转关节组成,可以在水平和垂直方向上进行运动。
在工业自动化领域,二自由度机械臂被广泛应用于装配线上的零部件处理、焊接、涂装等工作。
在本文中,我们将探讨如何利用Matlab对二自由度机械臂进行建模和控制。
我们需要建立二自由度机械臂的数学模型。
通过分析机械臂的结构,可以得到其运动学和动力学方程。
运动学方程描述了机械臂末端的位置和姿态与关节角度之间的关系,而动力学方程则描述了机械臂关节的运动和扭矩之间的关系。
利用Matlab可以方便地求解这些方程,从而实现对机械臂运动的仿真和控制。
接下来,我们可以利用Matlab进行机械臂的控制设计。
控制设计的目标是使机械臂能够按照预先设定的轨迹进行运动,并实现精准的定位和操作。
常见的控制方法包括PID控制、模糊控制和神经网络控制等。
在Matlab中,可以通过编写控制算法来实现对机械臂的闭环控制,从而提高其运动的精度和稳定性。
除了控制设计,Matlab还可以用于机械臂的路径规划和优化。
路径规划是指在给定约束条件下,寻找机械臂末端的最佳运动轨迹,以实现高效的操作。
而优化算法可以帮助机械臂在复杂环境中选择最优的路径,避免碰撞和提高效率。
通过Matlab的强大计算能力,可以快速地求解路径规划和优化问题,为机械臂的运动提供有效的支持。
二自由度机械臂的建模和控制是一个复杂而又具有挑战性的问题。
利用Matlab作为工具,可以方便地对机械臂进行仿真、控制设计、路径规划和优化,从而提高机械臂的运动性能和工作效率。
未来随着人工智能和机器学习的发展,二自由度机械臂的应用将会更加广泛,Matlab将继续发挥重要的作用,推动机械臂技术的发展和应用。
2 © 2023 大疆创新 版权所有声明参赛人员不得从事或参与任何经RoboMaster 组委会认定的涉嫌公众争端、敏感议题、冒犯大众或某些大众群体或其它破坏RoboMaster 形象的行为,否则,组委会有权永久取消违规人员的比赛资格。
阅读提示符号说明禁止重要注意事项操作、使用提示词汇解释、参考信息修改日志日期版本 修改记录 2023.04.11V2.0首次发布© 2023 大疆创新 版权所有3目录声明....................................................................................................................................................... 2 阅读提示 .. (2)符号说明 ........................................................................................................................................ 2 修改日志 ............................................................................................................................................... 2 1.大赛概要 ................................................................................................................................................ 4 1.1简介 ................................................................................................................................................. 4 1.2参赛队伍名单 .................................................................................................................................. 4 2. 赛制和奖项 ............................................................................................................................................ 7 2.1大赛制度 (7)2.1.1抽签方式 ............................................................................................................................... 7 2.1.2赛制....................................................................................................................................... 7 2.2 奖项设置 . (9)2.2.1 3V3对抗赛 ............................................................................................................................ 9 2.2.2步兵对抗赛 ............................................................................................................................ 9 2.2.3机器人实战奖 ...................................................................................................................... 10 3. 赛季日程 ............................................................................................................................................. 11 3.1场地适应性训练时间表 .................................................................................................................. 12 3.2比赛场序及时间表 ......................................................................................................................... 14 3.3比赛流程........................................................................................................................................ 19 4.场馆信息 .............................................................................................................................................. 20 4.比赛地点 .......................................................................................................................................... 20 4.2场地示意图 .................................................................................................................................... 20 4.3主要交通路线 ................................................................................................................................ 20 4.4餐饮安排........................................................................................................................................ 21 4.5酒店推荐........................................................................................................................................ 22 5. 参赛声明 ............................................................................................................................................. 23 5.1参赛安全须知 ................................................................................................................................ 23 5.2参赛声明........................................................................................................................................ 24 5.3知识产权声明 .. (25)4 © 2023 大疆创新 版权所有1. 大赛概要1.1 简介作为全国大学生机器人大赛旗下赛事之一,RoboMaster 机甲大师赛高校系列赛,是由大疆创新发起,专 为全球科技爱好者打造的机器人竞技与学术交流平台。

北京揽宇方圆信息技术有限公司
01
2007年12月,加拿大RADARSAT-2卫星发射升空,到现在已在太空运行10年了,围绕地球运行了近23.5亿公里,平均每年获取60000多景影像。
RADARSAT-2能够在任何天气条件下日夜扫描地球,凭借成熟的商业运作模式和实力雄厚的技术支撑团队,每天可靠、高效、及时地向全世界用户提供陆地、海洋和冰川等方面的数据。
RADARSAT-2卫星是一颗C波段综合大卫星,发射至今,仍在不断改进和释放更多的能量。
另外,RADARSAT卫星星座(RCM)将在2018年发射,RADARSAT家族将会更加强大,为各行业提供更加优质的数据资源保障,敬请期待!
北京揽宇方圆信息技术有限公司。
梦想成真的人物尼尔阿姆斯特朗的航天传奇梦想成真的人物尼尔·阿姆斯特朗的航天传奇导语:航天事业是人类追逐梦想的最高形式之一。
尼尔·阿姆斯特朗作为人类历史上首位登上月球的宇航员,他的航天传奇让我们相信,只要有梦想并为之努力,就能实现不可能。
一、童年与早年经历尼尔·阿姆斯特朗于1930年8月5日出生在美国俄亥俄州一个小镇。
从小,他就对航空和航天事业充满了浓厚的兴趣。
小时候,他曾目睹一次飞机坠毁事故,但这并没有让他对航空产生恐惧,反而激发了他进一步了解飞行和宇宙的热情。
二、成为宇航员的道路在高中时期,尼尔加入了学校的航空俱乐部,并进行了飞行训练。
毕业后,他获得了美国海军学院的录取,并在那里学习了航空工程。
毕业后,他成为了一名海军飞行员,并在朝鲜战争期间执行了多次作战任务。
在战斗中,尼尔展现出了出色的飞行技巧和冷静的应对能力,使他在同行中脱颖而出。
三、成为登月宇航员尼尔·阿姆斯特朗被选为“阿波罗11号”任务的指令舱飞行员。
1969年7月20日,他与巴兹·奥尔德林和迈克尔·柯林斯一起搭乘阿波罗太空舱启程前往月球。
经过长时间的飞行,他们顺利着陆在月球表面。
当时,全球有500多万人观看了阿波罗11号登月的实况转播,而尼尔成为了人类历史上首位在月球上行走的宇航员。
四、月球上的历史性一刻当尼尔踏上月球的那一刻,他发出了那句经典的台词:“那是个小步,却是一个巨大的飞跃。
”这句简短的话语代表着人类性格的谦卑和对未知挑战的勇气。
在月球上,尼尔和他的同伴收集了大量的科学数据,并且完成了一系列实验。
他们在月球上停留了大约两个半小时,并成功返回月球轨道,最终返回地球。
五、航天事业的传承与推动阿波罗11号任务成功地完成了人类历史上的首次载人登月任务。
尼尔·阿姆斯特朗因此成为了世界上最受尊敬的宇航员之一。
他的成就不仅为美国航天事业树立了榜样,更在全球范围内激励了无数年轻人追逐太空之梦。
nasa's robonaut 2 scrubs up课文NASA 的机器人助手 2 号(Robonaut 2)涉足了清洁工作领域。
这项新任务的目的是评估机器人在国际空间站上执行清洁任务的能力。
本文将介绍 Robonaut 2 在国际空间站上清洁工作的具体情况以及其对未来太空探索的重要意义。
Robonaut 2 是一款由 NASA 和 General Motors 共同研发的先进机器人助手。
它的外观与人类相似,拥有两只手臂和一颗头部,可自动执行多种任务。
Robonaut 2 在国际空间站上的使命是帮助宇航员完成各种繁重或危险的工作,从而减轻他们的负担并提高任务的效率。
然而,在长期的太空任务中,国际空间站上会积累大量的灰尘和颗粒物。
这些微小的颗粒可能会进入宇航员的呼吸系统,对他们的健康产生严重影响。
因此,保持国际空间站的清洁非常重要。
与此同时,由于太空重力微弱,空气流动缓慢,清洁工作对机器人助手来说相对困难。
为了解决这个问题,NASA 决定测试 Robonaut 2 的清洁能力。
首先,为了使 Robonaut 2 更适合执行清洁任务,研究人员对其进行了一些改进。
他们设计了一种新的吸尘器附件,方便机器人清洁空间站各个角落,包括难以到达的地方。
这个吸尘器附件通过机器人助手的手臂进行控制,可以自动吸除灰尘并存储在一个容器中。
在测试中,Robonaut 2 表现出了出色的清洁能力。
它可以准确地识别并清除空间站上的灰尘,包括壁角、天花板和其他难以到达的地方。
与传统的手动清洁相比,Robonaut 2 能够更快、更精确地完成任务,并减少宇航员与灰尘接触的时间。
这使得宇航员能够更专注于其他重要的科学实验和任务。
Robonaut 2 的成功表明,机器人助手在太空探索中的角色将越来越重要。
它们可以帮助宇航员完成各种复杂任务,从而提高任务效率和安全性。
此外,机器人助手还可以承担更多危险的任务,减轻宇航员的风险。
爱迪生尼尔阿姆斯特朗航天英雄的壮举爱迪生尼尔·阿姆斯特朗航天英雄的壮举20世纪60年代,人类迈出了向太空进发的重要一步,这一伟大的壮举正是美国宇航员尼尔·阿姆斯特朗的登月行动。
他的登月之旅不仅令人类进入了一个新的时代,更展示了人类的智慧和勇气。
尼尔·阿姆斯特朗的航天壮举永远成为人类历史上的里程碑。
一、科技的进步和航天探索的背景在回顾尼尔·阿姆斯特朗登月之前,我们需要了解科技进步和航天探索的背景。
20世纪60年代,冷战时期美国与苏联展开了一场太空竞赛。
苏联率先成功发射了人造卫星和载人航天飞船,并在1961年实现了尤里·加加林的太空飞行,这给了美国以极大的压力和挑战。
为了重新夺回太空竞赛的领导地位,美国国家航空航天局(NASA)启动了一个雄心勃勃的计划,即阿波罗计划。
其目的是将宇航员送往月球,并让他们安全返回地球。
这次任务被誉为人类历史上最伟大的科学事业之一。
二、登月前的准备工作阿波罗计划的实施需要大量的准备工作。
宇航员需要经过严格的选拔和训练,以确保他们具备足够的能力和勇气执行这个任务。
而技术和工程领域也面临着巨大的挑战,例如航天飞机的设计和制造、航天器的发射和调整、空间生命支持系统的开发等。
NASA确定了首次登月的任务日期为1969年7月20日,阿波罗11号是被选中的登月航天器。
这是一个搭载三名宇航员的太空舱,包括指挥舱、服务舱和登月舱,分别承担不同的任务。
三、登月英雄尼尔·阿姆斯特朗尼尔·阿姆斯特朗于1930年出生在美国俄亥俄州,他是阿波罗11号的指挥官。
在此之前,他已经参与了多个航天任务,积累了丰富的宇航经验。
他是一个勇敢、冷静、有着卓越飞行技巧的宇航员。
1969年7月16日,阿波罗11号从美国佛罗里达州的肯尼迪航天中心成功发射升空。
整个任务历时8天,其中在月球表面停留的时间约为21个小时。
而阿姆斯特朗则成为了第一个将脚步踏上月球的人类。
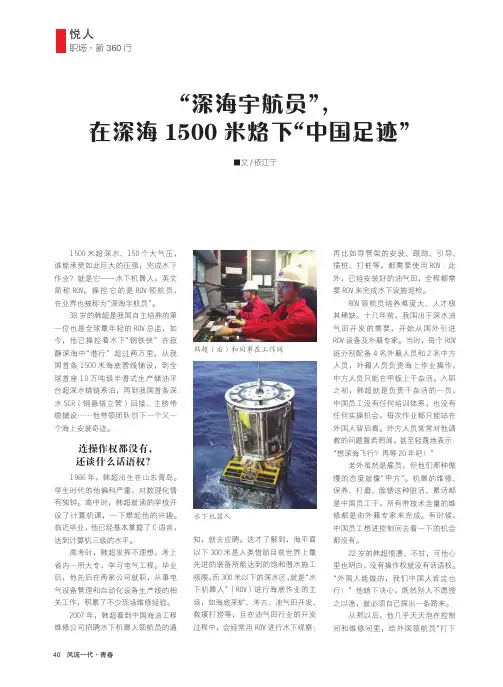
40悦人职场·新360行“深海宇航员”,在深海1500米烙下“中国足迹”■文/依江宁韩超(右)和同事在工作间水下机器人1500米超深水、150个大气压,谁能承受如此巨大的压强,完成水下作业?就是它——水下机器人,英文简称ROV。
操控它的是ROV 领航员,在业界也被称为“深海宇航员”。
38岁的韩超是我国自主培养的第一位也是全球最年轻的ROV 总监,如今,他已操控着水下“钢铁侠”在寂静深海中“潜行”超过两万里。
从我国首条1500米海底管线铺设,到全球首座10万吨级半潜式生产储油平台超深水锚链系泊,再到我国首条深水SCR(钢悬链立管)回接、主脐带缆铺设……他带领团队创下一个又一个海上安装奇迹。
连操作权都没有,还谈什么话语权?1986年,韩超出生在山东青岛。
学生时代的他偏科严重,对数理化情有独钟。
高中时,韩超就读的学校开设了计算机课,一下燃起他的兴趣。
临近毕业,他已经基本掌握了C 语言,达到计算机三级的水平。
高考时,韩超发挥不理想,考上省内一所大专,学习电气工程。
毕业后,他先后在两家公司就职,从事电气设备管理和自动化设备生产线的相关工作,积累了不少现场维修经验。
2007年,韩超看到中国海油工程维修公司招聘水下机器人领航员的通知,就去应聘。
这才了解到,海平面以下300米是人类借助目前世界上最先进的装备所能达到的饱和潜水施工极限,而300米以下的深水区,就是“水下机器人”(ROV)进行海底作业的主场,如海底采矿、考古、油气田开发、救援打捞等,且在油气田行业的开发过程中,会经常用ROV 进行水下观察;再比如导管架的安装、跟踪、引导、插桩、打桩等,都需要使用ROV ;此外,已经安装好的油气田,全程都需要ROV 来完成水下设施巡检。
ROV 领航员培养难度大、人才极其稀缺,十几年前,我国出于深水油气田开发的需要,开始从国外引进ROV 设备及外籍专家。
当时,每个ROV 班分别配备4名外籍人员和2名中方人员,外籍人员负责海上作业操作,中方人员只能在甲板上干杂活。
尼尔阿姆斯特朗Neil ArmstrongNeil Armstrong尼尔·阿姆斯特朗(Neil Armstrong)是美国宇航员,他以成为人类登月的第一人而闻名于世。
他于1930年8月5日出生在俄亥俄州农村地区的一个小镇上。
尼尔在他的职业生涯中取得了许多里程碑和杰出的成就。
本文将为您介绍尼尔·阿姆斯特朗的生平和他在航天事业中的贡献。
生平尼尔·阿姆斯特朗幼年时对飞行和太空探索产生了浓厚的兴趣。
他在少年时期就研究了许多航空方面的书籍,并用自己用积攒的零花钱购买的合金构建了自己的模型飞机。
这些早期的经历培养了他对太空探索的热情。
在1950年代,尼尔·阿姆斯特朗进入了普渡大学学习航空工程。
在大学期间,他展现出了卓越的学术表现和领导能力。
他是该校航空俱乐部的成员,并且积极参与一项名称为“Project Ball”的研究项目。
毕业后,尼尔·阿姆斯特朗成为美国国家航空和宇宙航行局(NASA)的一名宇航员,之后参与了多个航天任务。
他的第一次太空任务是在1966年进行的“双子星”计划中,该计划是为了测试在太空中进行活动的技术和装备。
登月任务尼尔·阿姆斯特朗真正的突破性时刻发生在1969年的阿波罗11号任务中。
这是NASA历史上第一次将航天器送往月球并成功着陆的任务,也是尼尔·阿姆斯特朗成为第一个登上月球的人。
当时,尼尔·阿姆斯特朗和他的搭档巴兹·奥尔德林和迈克尔·科林斯一同乘坐阿波罗11号飞船从地球出发。
他们的飞船成功进入月球轨道后,尼尔·阿姆斯特朗和巴兹·奥尔德林乘坐登月舱降落到月球表面。
1969年7月20日,尼尔·阿姆斯特朗开启了登月舱的门,迈出了历史性的一步,成为第一个在月球上行走的人类。
他在月球上待了大约两个小时,收集了样本并进行了一些科学实验。
这一时刻被全世界观众通过电视直播观看,被认为是人类历史上最重要的时刻之一。
大国重器之动力澎湃观后感在观看了《大国重器之动力澎湃》这部纪录片后,我的内心就像被扔进了一颗重磅炸弹,掀起了惊涛骇浪般的震撼和激动。
片中展现的那些超级工程和高端装备,真的是让我这个普通人开了眼。
以前啊,总觉得这些高大上的东西离咱的生活远得很,可看完才明白,它们实实在在地改变着我们的日子。
就拿燃气轮机来说吧,那家伙,以前我都不知道是啥玩意儿。
但纪录片里一介绍,我算是明白了,这东西就像是一个超级强大的“心脏”,为各种大型设备提供着源源不断的动力。
想象一下,一艘巨大的轮船在茫茫大海上航行,如果没有强大的燃气轮机提供动力,那不得像蜗牛一样慢吞吞地漂着?有了它,轮船就能乘风破浪,快速地把货物和人员送到目的地。
而且,这可不仅仅是在海上,在发电厂里,燃气轮机也能高效地发电,让咱们家里的灯一直亮堂堂的。
还有那个重型燃气轮机的自主研发过程,真的是太不容易了。
科研人员们那股子不服输的劲儿,真让人佩服。
他们面对国外的技术封锁,一点都不害怕,埋头苦干,一次又一次地试验、改进。
那密密麻麻的数据和图纸,看得我眼花缭乱,可他们却能从中找出问题,解决问题。
我就在想,要是让我面对那些东西,估计早就晕头转向了。
说到这儿,我想起了纪录片里的一个小细节。
有个年轻的工程师,为了一个关键部件的研发,连续好几个月都泡在实验室里。
他的眼睛里布满了血丝,头发也乱蓬蓬的,但一说起自己的工作,立马就精神抖擞,那种专注和热爱,真的让人感动。
他说:“咱中国人,就得有自己的重型燃气轮机,不能被别人卡着脖子!”就这么一句话,简单朴实,却充满了力量。
还有啊,片中的那些大型装备制造工厂,那场面,简直太壮观了!巨大的厂房里,机器轰鸣,火花四溅。
工人们熟练地操作着各种先进的设备,把一个个零件加工成精密的部件。
我看到一个老师傅,拿着卡尺,仔细地测量着一个零件的尺寸,那认真的模样,就好像在对待一件稀世珍宝。
他说:“差一丝一毫都不行,这关系到整个装备的性能。
”这种对工作的严谨和负责,真的让人肃然起敬。
龙源期刊网 双臂机器人德克斯特太空耍酷作者:跳跳鼠来源:《学苑创造·A版》2008年第04期主持跳跳鼠2008年3月,美国宇航局启动“奋进”号航天飞机,7位宇航员携带“人形怪物”德克斯特乘机飞抵国际空间站——他们这次太空之旅的主要任务,居然是把双臂机器人德克斯特(Dextre)装进空间站,任它太空耍酷。
有点儿像“太空冷血杀手”双臂机器人德克斯特是由加拿大宇航局负责研制的。
它有两只手臂,臂长各11英尺,两臂之间的宽度约为2.4米,整体高度约为3.6米。
德克斯特的名字有“灵活和果断”的意思,但对于宇航员加勒特,雷斯曼来说,这个巨大的机器人看上去有点儿咄咄逼人:“现在我们不能说我们担心这个巨大的机器人会变成一些科幻电影中的冷血杀人狂,成为国际空间站的主宰者。
这是因为我们知道这个机器人是如何运行操作,而且它不具备人工智能。
但我仍要说的是,它体型庞大,看上去就像长着巨大手臂的空中怪物,让你看着感觉很恐怖。
”当然,没有面孔和腿的德克斯特机器人不过是看上去有点吓人罢了,按照设计,国际空间站的宇航员能够控制德克斯特机器人,地球上的飞行操控员也可以完成对它的控制,它成为“太空冷血杀手”的可能性不大。
精确的触觉和灵敏度据加拿大宇航局的官员说,他们相信德克斯特机器人能够胜任哈勃太空望远镜的修复工作,同时也可以置换老电池和其他空间站组件。
负责德克斯特机器人设计的加拿大宇航局工程师丹尼尔·雷(Daniel Rey)说,“令人惊奇的是这个巨大的太空机器人具有非常精确的触觉和灵敏度!”原来,送机器人德克斯特“扎根”空间站,是为了让它修复哈勃望远镜。
当然也不全是这样。
重达3400磅的德克斯特机器人,它的制造成本在2亿美元以上,是由建造航天飞机和国际空间站机械手臂的同一组加拿大研究小组研制的。
德克斯特机器人被装配上工具皮套后,将主要用于协助在太空行走的宇航员开展工作,最终是“接替”宇航员进行危险的太空舱外工作。
国内外对问天舱机械臂的评价
问天实验舱是中国空间站的一部分,其中包括了一个小机械臂,也被称为“天和机械臂”或“问天机械臂”。
这个小机械臂是中国自主研发的,具有很高的技术含量和创新性。
国内外对问天舱机械臂的评价普遍较为积极。
以下是一些具体的评价:
国内评价:
1.中国国家航天局表示,问天舱机械臂的研制成功标志着中国在空间机械臂领域取得了重大突破。
2.中国工程院院士、航天科技集团公司五院院长杨孟飞认为,问天舱机械臂的成功应用将有助于中国在空间探索领域的进一步发展。
国外评价:
1.美国《纽约时报》报道称,问天舱机械臂的成功研发和应用表明中国在空间探索领域的技术实力已经达到了国际先进水平。
2.英国广播公司(BBC)报道称,问天舱机械臂的成功应用将为中国在太空探索领域的未来发展奠定坚实的基础。
3.德国《明镜周刊》报道称,问天舱机械臂的成功研发和应用表明中国已经成为全球领先的航天大国之一,具有重要的战略意义。
总之,国内外对问天舱机械臂的评价普遍较为积极,认为其成功研发和应用标志着中国在空间探索领域的技术实力和创新能力的进一步提升。
太空里的机械臂作者:深蓝来源:《小学科学》2021年第09期中国的“天宫”空间站热度持续上升,太空冒险扣人心弦又让人向往。
你知道眼下最热门的太空装置是什么吗?那当然是我国目前智能程度最高、规模与技术难度最大、设计最复杂的空间智能制造系统!这一长串名头儿是否让你云里雾里了?没关系,我们且慢慢往下看。
“长脑子”的机械臂空间智能制造系统是什么?其实它有一个通俗的名称——空间机械臂。
对!就是那个能够从空间站伸出去的机械“手臂”,能够协助航天员完成大量舱外操作任务,也是载人航天器不可或缺的重要辅助装置。
更让人意想不到的是,空间机械臂不仅是一个灵活的机械装置,还是“长脑子”的呢!空间机械臂更像是一个智能机器人,它能夠精确操作各种设备,并具有视觉识别能力,因此不仅可以受航天员遥控,也可以自主分析具体情况并做出相应反应。
后起之秀人类探索太空已近百年,在如此漫长的时间里,能够真正发挥空间机械臂作用的国家简直是凤毛麟角,截至目前也不过加拿大、德国、日本和中国而已。
其中,中国的空间机械臂虽刚刚问世,但很快就吸引了全世界的目光,我们依靠技术进步带来的“后发优势”,赢得了赞誉。
随着20世纪70年代美国航天飞机的研发,空间机械臂开始研制。
1981年,加拿大航天飞机成功发射升空,携带一套由加拿大研发的六自由度机械臂系统,称为“加拿大1号”,这台机械臂总长15.2米,直径0.38米,能够抓取、存放332.5千克的物品或设备。
不久,“加拿大2号”机械臂问世,各方面性能较上一代大幅提高,成为国际空间站的“顶梁柱”。
加拿大、德国、日本等国家的机械臂都各有特色。
那么,初来乍到的“新人”——中国机械臂,又有什么过“臂”之处呢?媲美“加拿大2号”中国“天宫”空间站上安装的机械臂,其技术水平处于世界前列,足以媲美国际空间站的“加拿大2号”。
核心舱的机械臂总长10.2米,有7个活动关节,达到了七自由度,比人的手臂还要灵活,而且力量更为强大,能够对接、移动25吨重的物体。
加拿大机械臂2太空多面手十年传奇
2011年4月19号,国际空间站加拿大机械臂2迎来了10周年发射纪念日。
10年前,加拿大人见证了一个历史性的时刻。
2001年4月19日,加拿大机械臂2由“奋进”号航天飞机搭载升空,在NASA航天员斯科特?帕拉赞斯基的帮助下,加拿大航天员克里斯?哈德菲尔德将其安装在了国际空间站上。
10年以来,加拿大机械臂2伴随着国际空间站,已经走过了超过24亿千米的路程,相当于太阳和土星距离的1.5倍。
太空“多面手”
在国际空间站复杂的组装过程中,加拿大机械臂2提供了十年完美的服务,完成了很多重要组件的组装工作。
比较大的组件如“探索”号气闸舱、“哥伦布”实验舱、“希望”号实验舱等等。
它是加拿大对国际空间站的主要贡献,同时也保障了加拿大科学家在国际空间站上的科学研究权利。
加拿大机械臂2是不折不扣的太空“多面手”:从NASA 的航天飞机到国际空间站,从航天器的维修、能源补给到空间站的组装,都有加拿大机械臂的参与。
截至今年“阿特兰
蒂斯”号最后一次飞行,加拿大机械臂2共完成了29次航天飞机捕获任务。
十年来。
它从航天飞机上卸下了数百吨的货物和科学设备,辅助了将近100次的太空行走,完成了两次太空捕捉任务(捕获HTV-1和HTV-2国际空间站对接,而后释放)。
加拿大机械臂2由麦克唐纳德?特威勒(MDA)公司制造,正式的名字是“空间站遥控操纵系统”(SSRMS,Space Statlon Remote Manipulatorsvstem)。
它和移动远程服务器基座系统(为空间站远程操纵系统和专用灵巧操作臂提供电源、数据连接和视频信号的传输)、专用灵巧操作臂一起,构成了整个移动维修系统(MSS,MobileServicing System)。
通常,这个机械臂操作由其地面控制中心――NASA约翰逊航天中心和位于魁北克省的圣胡伯特加拿大航天局总部控制。
和人的手臂一样,加拿大机械臂2由“肩膀”(3个关节)、“肘部”(1个关节)、“手腕”(3个关节)组成。
它有7个自由度,可以在空间中7个方向上自由工作。
它的结构以肘关节为中心完全对称,臂的两端均可以用来作为肩部或安装末端器作为操作末端,这一设计使得操作臂在空间站运行更加自如和方便。
机械臂的操作者可以通过机器人工作站(RWS,Robonc WorkStation)上的3个kCD显示屏看清他们正在进行的工作。
MSS上有2个RWS单元,在建成后完整的国际空间站上,
一个RWS单元位于“命运”号实验舱。
另一个则位于穹顶舱内。
RWS单元外加显示和控制面板,以及便携式电脑,有2套操纵杆:1套旋转式手动操纵杆,1套平移式手动操纵杆。
设计:空间机器人的典范
早在设计之初。
工程师们认识到,国际空间站上的机械臂应当有更高的移动能力。
它应当和固定在航天飞机上的机械臂有所不同。
于是就有了可以自由翻转滚动的设计。
正是这个设计给了加拿大机械臂2独一无二的能力,得以推动自身到达空间站外部的任意一点。
每个装置都给机械臂提供电力,有计算机/视频连接到航天员控制舱。
另外,比起为航天飞机设计的机械臂,加拿大臂2更大,也更重。
它可以移动11.6吨重的载荷一一跟航天飞机的重量差不多,因为这个机械臂原本设计用来抓取航天飞机使之停靠在国际空间站的,而今天,航天飞机与国际空间站的对接已经用不到它了。
加拿大机械臂和航天飞机机械臂通力合作,将载荷在国际空间站和航天飞机之间运送。
7个自由度的它自然比航天飞机机械臂更加灵活和优秀。
它可以弯曲,旋转,移动,完成更多更复杂的任务。
国际空间站外部大部分设备为轨道可更换单元(ORU,
orbit replaceableHnltS)。
当他们受损或者失效时,可以很容易地进行更换。
加拿大机械臂2就是进行这些维护工作的重要工具。
而加拿大机械臂本身也是进行了可在轨更换单元设计,2002年6月,失效的手腕翻转关节被航天员进行了更换。
和航天飞机机械臂不一样,加拿大机械臂2是可更新的,因为它也许再也没有回地球的机会了。
随着国际空间站的完工,加拿大机械臂2的主要职能也会有明显的转变。
除了执行常规任务(包括国际空间站的维修与保养,协助航天员太空行走),继续履行在外部空间站维修的使命外,加拿大机械臂2将执行更频繁的太空捕捉任务:抓取货运飞船使之与国际空间站对接。
航天飞机退役后,可重复使用的商业太空船,像科学探索公司的“龙”太空船和轨道科学公司“天鹅座”太空船,将会被用来执行国际空间站的补给任务。
按照目前的时间表,在2011年底到2012年前期,加拿大机械臂2将会在7个月的时间内连续捕捉6艘商业飞船,最早的一次是2011
年11月捕捉“龙”太空船任务。