液压挖掘机挖掘动力学建模研究
- 格式:pdf
- 大小:1.47 MB
- 文档页数:7

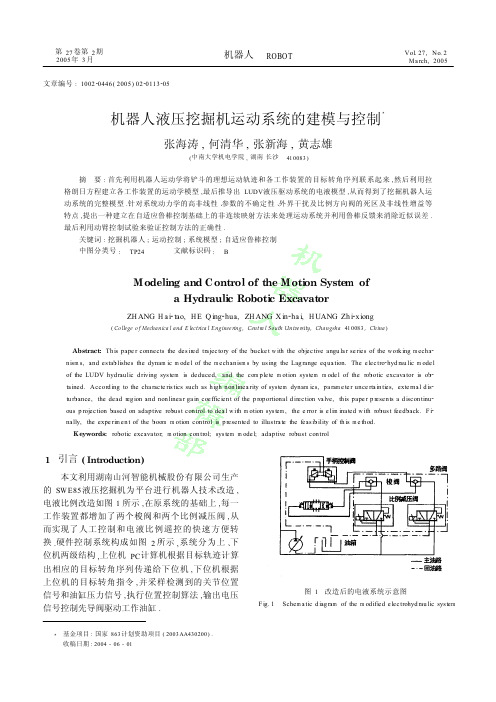
第 卷第 期年 月机器人 ×∂文章编号 2 2 2机器人液压挖掘机运动系统的建模与控制3张海涛 何清华 张新海 黄志雄中南大学机电学院 湖南长沙摘 要 首先利用机器人运动学将铲斗的理想运动轨迹和各工作装置的目标转角序列联系起来 然后利用拉格朗日方程建立各工作装置的运动学模型 最后推导出 ⁄∂液压驱动系统的电液模型 从而得到了挖掘机器人运动系统的完整模型 针对系统动力学的高非线性!参数的不确定性!外界干扰及比例方向阀的死区及非线性增益等特点 提出一种建立在自适应鲁棒控制基础上的非连续映射方法来处理运动系统并利用鲁棒反馈来消除近似误差 最后利用动臂控制试验来验证控制方法的正确性关键词 挖掘机器人 运动控制 系统模型 自适应鲁棒控制中图分类号 ×° 文献标识码ΜοδελινγανδΧοντρολοφτηεΜοτιονΣψστεμοφαΗψδραυλιχΡοβοτιχΕξχαϖατορ2 ∞± 2 ∏ ÷ 2 2¬(ΧολλεγεοφΜεχηανιχαλανδΕλεχτριχαλΕνγινεερινγ,ΧεντραλΣουτηΥνιϖερσιτψ,Χηανγσηα ,Χηινα)Αβστραχτ:× ∏ √ ∏ 2 ∏ ∏ × 2 ∏ ⁄∂ ∏ √ ∏ ¬ √ 2 ∏ ∏ ¬ 2 ∏ √ √ ∏2 ∏ √ ∏ ∏ ƒ 2 ¬ ∏ Κεψωορδσ: ¬ √ √ ∏1 引言(Ιντροδυχτιον)本文利用湖南山河智能机械股份有限公司生产的≥•∞ 液压挖掘机为平台进行机器人技术改造电液比例改造如图 所示 在原系统的基础上 每一工作装置都增加了两个梭阀和两个比例减压阀 从而实现了人工控制和电液比例遥控的快速方便转换硬件控制系统构成如图 所示 系统分为上!下位机两级结构上位机°≤计算机根据目标轨迹计算出相应的目标转角序列传递给下位机下位机根据上位机的目标转角指令并采样检测到的关节位置信号和油缸压力信号执行位置控制算法 输出电压信号控制先导阀驱动工作油缸图 改造后的电液系统示意图ƒ ≥ ∏3基金项目 国家 计划资助项目 收稿日期图 控制系统的硬件构成ƒ ∏2运动系统模型的建立(Μοδελινγοφτηεμοτιονσψστεμ)挖掘机器人运动控制系统由控制器!液压动力系统和挖掘机工作装置组成,其中工作装置主要是由上车!动臂!斗杆!铲斗等组成.2.1工作装置运动学分析建立工作装置的运动学模型是为了将铲斗尖的目标轨迹转化为实现该轨迹所需要的目标转角序列,并确定液压缸活塞杆的伸缩序列.图 定义了基坐标系Ο{ΞΨΖ}来描述铲斗尖的位置,并将Ο {ξψζ}!Ο{ξψζ}!Ο{ξψζ}!Ο{ξψζ}系统地加在各关节处,从而得到各坐标系之间的⁄2 变换矩阵为:Αιι− =Ηι− ΑιΗιΑιΗιαιΗιΑιΗι− ΑιΗιαιΗι ΑιΑιδι( )其中ι , , ,,将这些矩阵相乘便可以得到决定铲斗位置和方向的/手0矩阵:Α(αααα)(αααα)αΗαΗαΗδ( )其中(Η),(Η),(ΗΗΗ ),(ΗΗΗ).对于以时间τ为自变量的给定铲斗运动轨迹φ(τ),理想的铲斗位置和方向又可用基坐标系中的一个位置矩阵即φ(τ) [νξ,σξ,αξ,πξ;νψ,σψ,αψ,πψ;νζ,σζ,αζ,πζ; , , , ]表示出来,其中ν!σ!α为姿态矩阵,π为位置向量,通过解方程( ),便可以求出与理想轨迹点对应的各铰点的关节角为:φ(τ)=Α(τ)( )图 液压挖掘机工作装置运动学模型ƒ ∏¬ √ π2.2工作装置的动力学模型挖掘作业时,挖掘机工作装置在铅直面内运动,故可设转角Η.每个工作臂的动力学方程可根据拉格朗日方程导出.本文以动臂为例,设斗杆和铲斗固定,动臂缸无杆腔和有杆腔的压力分别为Π和Π,面积分别为Α 和Α ,Τ(τ,Η ,Η. )为含外载和摩擦阻力矩的总干扰力矩,ξ!ψ为大臂重心在ο{ξψζ}中的坐标,ξ !ψ 为斗杆重心在ο {ξ ψ ζ }中的坐标,ξ!ψ为铲斗重心在ο{ξψζ}中的坐标值;Ι!Ι!Ι分别为动臂!斗杆和铲斗相对于其重心的转动惯量;μ!μ!μ分别为动臂!斗杆和铲斗的质量,μΛ为铲斗中未知负载的质量,则动臂相对于铰点Ο的动力学方程为:(ΔχμΛλε)Η..Γχ(Η) μΛγλγ(Η)5ξΛ5Η(ΠΑΠΑ) Τν(τ,Η,Η.)( )式中,ΔχΙμ(ξλ) μψΙμ(ξλλ) μ(ψλ) Ιμ(ξλλλλ) μ(ψλλλ)Γχμγλμγξβχμγψβμγ(λλ) μγ(ξψ) μγλμγλμγλμγξμγψ其中!!为 (Η)! (ΗΗ)! (ΗΗΗ).2.3电液比例系统模型[5,6]液压挖掘机的油缸由换向阀控制,换向阀的开口量由比例阀输出油压大小所确定,而比例阀减压机器人 年 月阀输出的油压由控制器输出的电压大小所决定.液压系统模型如图 所示.图 ⁄∂液压系统示意图ƒ ≥ ⁄∂ ∏设:( )比例阀为对称三位四通阀,阀内流体为紊流;( )忽略管道压力损失及其动态特性;( )比例阀的死区对称.以动臂阀控液压缸为例,其动力学模型为:ς (ξΛ)ΒεΠ.=−Α ¾ξΛ+Θ =−Α 5ξΛ5ΗΗ.+Θ ς (ξΛ)ΒεΠ. =Α ¾ξΛ−Θ =Α5ξΛ5ΗΗ. −Θ ( )其中ς (ξΛ) ςη Α ξΛ,ς (ξΛ) ςη Α ξΛ,为两个腔的控制容积,ςη 和ςη 分别为进油路和回油路在ψ时的容积,Βε为有效体积模量,Θ 和Θ 分别为进入和流出液压缸的流量,设Πρ为回油压力,ΠΛΣ和Πη分别为ΛΣ阀和压力补偿阀弹簧的压力,由 ⁄∂系统工作原理[ ]可得:Θ Χδ Ωξϖφ (∃Π )Χδ ΩξϖΠΛΣ ΠηΧδ ΩξϖΠ Πρξϖ∴ ξϖΘ Χδ Ωξϖφ (∃Π )Χδ ΩξϖΠ ΠρΧδ ΩξϖΠΛΣ Πηξϖ∴ ξϖ( )由于比例阀存在死区,且试验表明流量增益Χδ为非线性的[ ],如图 所示,设比例阀的净开口量为:ξ √=ξϖ−ξδξϖ+ξδ, ξϖ∴ξδ,−ξδ[ξϖ[ξδ, ξς<−ξδ( )其中ξδ为阀的死区,简便起见,我们用两条直线来近似阀的流量增益系数,为了便于控制,我们将阀的流量Θ分为式( )所表示的两部分,其中ΘΜ为简化了的流量映射函数,Θ∗为流量映射的模型误差,Θ∗的影响将通过一定的鲁棒反馈来进行处理.而ΘΜ的表达式为式( ),对于一定的阀位移点而言,Χδ 和Χδ 为常量.Θ(ξϖ,∃Π)=ΘΜ(ξϖ,∃Π)+Θ∗(ξϖ,∃Π)( )Θ Μ=Χδ Ωφ (∃Π )ξ √Θ Μ=Χδ Ωφ (∃Π )ξ √( )3 适应鲁棒控制器的设计(Δεσιγνοφτηεα2δαπτιϖεροβυστχοντρολλερ)由挖掘机模型可知,对挖掘机进行控制的主要难点在于:∞系统的动力学是强非线性的;ƒ系统参数存在不确定性,如惯性负载μΛ!液压系统体积模量Βε的不确定性; 外界干扰和未建模的摩擦力引起的干扰Τν; 方向阀的死区!非线性流量增益等.为了解决上述问题,本文采用建立在自适应鲁棒控制器基础上的非连续映射来处理系统的非线性及参数的不确定性,利用图 中以通过坐标原点且与ξ轴成 β的直线为对称轴!增益曲线的对称曲线对阀的死区进行补偿,并利用鲁棒反馈来补偿流量映射误差.主要考虑由未知载荷μΛ!体积模量Βε和集中干扰Τν三个不确定参数,设θ(λε/ϑχ)μΛ,θΤνϑχ μΛλε,θ Βε,并且θ [θ ,θ ,θ ]×,则式( )!( )可以变换为以θ为参数的线性函数:Η..θ ϑχ[5ξΛ5Η (Π Α Π Α ) Γχ(Η )] θλ εγλγλ εγλγ θ Τ∗(τ,Η ,Η# )Π.Η ς ( Α 5ξΛ5ΗΗ.Θ Μ Θ∗ )Π.Η ς(Α5ξΛ5Η Η. Θ Μ Θ∗ )( )其中Τ∗Τ(τ,Η ,Η.) Τνϑχ μΛλε,θ [θ[θ ¬, Τ∗[ΔΤ,第 卷第 期张海涛等 机器人液压挖掘机运动系统的建模与控制Θ∗[ΔΘ , Θ∗[ΔΘ ,且θ !θ ¬!ΔΤ!ΔΘ !ΔΘ 已知.设⊥θ和θ∗为θ的估计值和估计误差,接下来寻找自适应法则( ),式中#为对角矩阵,Σ为自适应函数,ΠροϕΗ(#)为非连续投影映射.⊥θ.=ΠροϕΗ (#Σ)( )( )Π Α Π Α ΠΛ为方程( )的输入,因此要寻找有效输入ΠΛδ使得输出误差ζ Η Η δ趋近于零,以保证轨迹跟踪精度.设:Η.ρ Η.δ κ ζ ,Η..ρ Η..δ κ ζ.,ζ Η.δ Η.ρ<ϑχ(5ξΛ5ΗΠΛδα Γχ) γλγ/λε, , ×由式( )并根据 ∏ √函数,可得:ΠΛδ ΠΛδα ΠΛδσ,Σ < ζ ΠΛδα5Η 5ξΛ[ΓΧ(Η )ϑχθ(⊥θ.λ εγλγλ εγλγ ⊥θ &θ ρ)] ΠΛδσ ΠΛδσ ΠΛδσ ΠΛδσϑΧθ 5Η 5ξΛ(κ σ κ )ζ ,κ( )( )设ζ ΠΛ ΠΛδ为输入误差,接下来将推出实际控制法则使ζ 趋于零.由式( )可得: ¾ζ Π.Λ Π.Λδ θ(Ας Ας )5ξΛ5Η Η.(Α ςΘ ΜΑ ςΘ Μ) (Α ςΘ∗Α ςΘ∗)Π.Λδχ Π.Λδυ( )其中Π.Λδχ5ΠΛδ5ΗΗ.5ΠΛδ5Η.Η.. 5ΠΛδ5τ为Π.Λδ的计算部分,通过鲁棒反馈处理Π.Λδ的误差部分Π.Λδυ5ΠΛδ5Η.[ϑχ#(5ξΛ5ΗΠΛ Γχ(Η ))θ∗λεγλγθ∗ θ∗ Τ∗] 5ΠΛδ5θ⊥θ..在式( )中,Α ςΘ ΜΑ ςΘ Μ ΘΛ可视为有效输入,本过程将推导出ΘΛ的理想输入ΘΛδ,使ΠΛ跟踪步骤( )中推出的理想控制函数ΠΛδ.控制函数ΘΛδ和自适应函数Σ 分别为:ΘΛδ(Η ,Η.,Π ,Π ,⊥θ,τ)=ΘΛδα+ΘΛδσΣ =Σ +< ζ ΘΛδα=−θ ΘΛδεΘΛδσ=ΘΛδσ +ΘΛδσΘΛδσ =−θ(κ +κ σ )ζ , κ >( )其中Σ Σ < ζ ,ΘΛδε ϑχ5ξΛ5Η ζ ⊥θ ⊥θ(Ας Ας )5ξΛ5Η #Η.Π.Λδχ,< [ ϑχ5ξΛ5Η ζ 5ΠΛδ5Η.[ ϑχ(5ξΛΘ5Η ΠΛ Γχ(Η )) λ εγλγ], 5ΠΛδ5Η., (Ας Ας )5ξΛ5Η Η. ΘΛδα]×在得到ΘΛδ的值后,由式( )!( )便可以计算出理想的阀芯净位移为:ξ √=ΘΛδ(Η ,Η.,Π ,Π ,⊥θ,τ)Α ςΧδ φ (∃Π )+Α ςΧδ φ (∃Π )( )设阀芯的位移与控制电压υ阀芯位移ξϖ成正比,即ξϖΚυ,则:υ=Κξϖ=Κ(ξ √+ξδ)Κ(ξ √−ξδ) ξ √∴ξ √=ξ √<( )令自适应法则( )中的Σ Σ ,选择κ σ !κ σ 使得κ σ∴+#< + ,κ σ ∴+#< +,那么使用控制法则( )便可以达到较好的控制精度.图 比例阀流量增益的非线性特性ƒ √ √4 试验研究及结论(Εξπεριμεντανδχονχλυ2σιον)以湖南山河智能机械股份有限公司的≥•∞ 液压挖掘机器人为试验平台对动臂进行转角控制试验 控制系统的硬件结构如图 所示 设动臂的目标转角运动以 β为中心!幅值为 β的一个正弦曲线 试验结果如图 所示 结果表明控制器能较好地完成对理想轨迹的跟踪机 器 人 年 月本文提出了一种对挖掘机进行运动轨迹控制的方法 能够保证必要的精度 在本系统的基础上进行通讯系统的设计 便可以实现挖掘机的遥控操作 在此基础上解决挖掘机的运动规划问题 便可以实现全自动化挖掘图 大臂转角控制试验ƒ ∞¬ π参考文献(Ρεφερενχεσ)≈ ⁄ ≥ ⁄ × √ ∏2 ∏ ¬ √ ≈ ∏ ≥ 2 ≈ ± ≥ ∏ ± ¬ √ ∏ ∏ 2 ≈ ∞∞∞ ∏≈ ≠ √ ∏ ≈ ° ∞∞∞≤ ⁄ ≤ ≈≤≈ 朱湘翼 机械铲式挖掘机机器人化的探讨≈ 机器人≈ 孙守迁 冯培恩 金永昕 微机操纵液压挖掘机反铲典型作业循环过程路径规划及运动学研究≈ 工程机械 ≈ 李兰生 邹占江 液压挖掘机工作装置专家模糊控制系统的研究≈ 矿山机械≈ 罗安 智能电液比例位置伺服系统≈ 组合机床与自动化加工技术≈ 张铁 朱明才 工程建设机械机电液一体化≈ 山东 石油大学出版社作者简介张海涛 2 男 工程师 硕士研究生 研究领域 矿山机械 工程机械 液压传动与控制何清华 2 男 教授 博士生导师 研究领域 液压工程机械 凿岩机器人技术上接第 页5结论(Χονχλυσιον)本文借助流体动力计算软件≤ƒ÷和 对水下滑翔机器人的阻力!流场及运动特性进行联合仿真 结果表明 这种直观而快速的设计方法给水下滑翔机器人方案设计带来较大的便利 应该指出的是 还可以利用≤ƒ÷与 ≥ ∞ 软件进一步对水下滑翔机器人的水动力系数进行模拟仿真通过≤ƒ÷和 的联合仿真 我们得到了比初步方案更为优越的水下滑翔机器人外形 这为我们在方案设计阶段把握水下滑翔机器人载体的外形对载体运动的影响 从而实现对载体的外形修正提供了一种较为直观的手段致谢本文在完成过程中 得到了吴利红博士和康涛硕士的大力帮助 在此表示诚挚的谢意参考文献(Ρεφερενχεσ)≈ 蒋新松 封锡盛 等 水下机器人≈ 沈阳 辽宁科学技术出版社≈ 陈厚泰 潜艇操纵性≈ 北京 国防工业出版社 ≈ 施生达 潜艇操纵性≈ 北京 国防工业出版社≈ 孙元泉 马运义 邓志纯 等 潜艇和深潜器的现代操纵理论与应用≈ 北京 国防工业出版社≈ 邵世明 赵连恩 朱念昌 船舶阻力≈ 北京 国防工业出版社≈ 徐燕侯 过明道 徐立功 等 流体动力学≈ 北京 科学出版社≈ 张宇文 鱼雷总体设计原理与方法≈ 西安 西北工业大学出版社≈ 燕奎臣 等 深海作业型自治水下机器人总体方案设计报告 载体分系统设计分册 ≈ 沈阳 中科院沈阳自动化研究所科技报告≈ 袁学庆 等 自治水下机器人阻力的数值模拟与试验研究≈ 沈阳 中科院沈阳自动化研究所作者简介胡克 2 男 研究领域 水下机器人结构设计与水动力分析俞建成 2 男 研究领域 水下机器人设计 导航与控制张奇峰 2 男 研究领域 水下机器人设计 导航与视觉第 卷第 期张海涛等 机器人液压挖掘机运动系统的建模与控制。

某型液压挖掘机动力总成设计与研发随着城市建设的不断推进,挖掘机在现代化施工中扮演着非常重要的角色,特别是在土木工程和矿山领域。
液压挖掘机作为一种高效、多功能、具有强大工作能力的机械设备,其动力机组是它的核心部件。
本文着重探讨某型液压挖掘机动力总成设计与研发的相关问题。
一、某型液压挖掘机基本情况某型液压挖掘机是一种轮式挖掘机,其整机由底盘、旋转机构、工作装置等几个部分组成,动力机部分则包括发动机和液压系统。
底盘:底盘是整个液压挖掘机的支撑骨架,其主要承载着液压挖掘机的重量和动力装置,同时也是整个机体的牵引力来源。
其结构特征为齿轮输出,采用了大范围锻造和模块化设计,从而大大提升了系统性能。
旋转机构:旋转机构承载液压挖掘机上部的工作装置,并能够让其360度的旋转。
其结构特点为滑动阀调节液压马达输出,且通过同步轴来控制整机移动。
工作装置:工作装置通过液压伸缩活塞实现挖掘动作的完成。
其结构特点为高效强力。
动力装置:动力装置是液压挖掘机的核心部件,也是本文关注的重点。
其包括发动机和液压系统两部分。
二、某型液压挖掘机动力总成研究现状液压挖掘机的动力总成是其核心组成部分之一,在其汽车工业发展的历史中,动力总成的研究和应用始终是一个重点和难点。
此外,全球范围内的相关工厂也在不断地推陈出新,争相提高液压挖掘机动力总成的性能和使用寿命。
而在本型号液压挖掘机的动力总成设计和研发中,也遵循着这一方向。
发动机:液压挖掘机的发动机种类繁多,常见的有汽油机、涡轮增压式柴油机、双涡轮增压式柴油机等。
在本型号液压挖掘机中,采用了柴油机作为动力来源。
某型挖掘机的发动机广泛采用的是同类别上中功率柴油机,混合式液压系统有助于进一步提高其燃油经济性。
液压系统:液压系统是解决液压挖掘机如何进行被动工作的关键之一。
在某型号液压挖掘机中,液压系统控制了所有的液压功能例如挖掘、铲运、倾倒等,是液压挖掘机性能的决定性因素之一。
在其研发过程中,也最大化地提高了有效功率,并推出了独有的篮球形设计方案。


液压挖掘机的系统建模与控制液压挖掘机是一种高效的工程机械,被广泛应用于土方工程、采矿和建筑等领域。
液压挖掘机的核心部件是液压系统,其负责对挖掘机的各项运动进行控制和协调。
由于液压挖掘机的工作环境十分恶劣,其液压系统的设计和控制系统的研发都十分具有挑战性。
本文将探讨液压挖掘机的液压系统建模和控制。
一、液压系统的建模液压系统的建模是指将其抽象为一个数学模型,以便于对其进行控制和分析。
液压系统的建模可以分为两个层次:系统层次和元件层次。
1.系统层次建模系统层次建模是将整个液压系统抽象为一个闭合的控制系统,其中输入是液压泵的输出压力和流量,输出是液压缸的运动速度和力。
系统层次建模中,液压系统可以看作是一个混沌、耗散、非线性系统。
针对这类系统,通常采取状态空间模型进行建模,即将系统表示为一个一阶微分方程组。
这种建模方法可以更好地反映液压系统的动态响应特性。
2.元件层次建模元件层次建模是将液压系统抽象为多个基本构件组成的网络,以便于对各个构件进行建模和分析。
在元件层次建模中,设计液压系统常用的元件有:液压泵、液压缸、液压马达、电磁换向阀、安全阀等。
这些元件的建模通常采用动态流量法或静态力平衡法。
二、液压系统的控制液压系统的控制是指控制系统对液压系统各项运动进行协调和调节。
液压挖掘机的工作环境十分复杂,其液压系统的控制设计往往需要考虑各种外部干扰以及自身的稳定性和安全性等因素。
1. PID控制PID控制是一种经典的控制方式,常用于对液压系统进行控制。
PID控制器包括三个部分:比例环节、积分环节和微分环节。
比例环节对误差进行线性比例控制,积分环节对误差进行积累控制,微分环节则对误差进行微分控制。
PID控制器可以自适应地调节参数,从而达到更好的控制效果。
2. 模糊控制模糊控制是一种非线性控制方法,它适用于复杂的非线性系统。
液压挖掘机的液压系统具有强耦合、非线性等特点,因此模糊控制可以应用于对其进行控制。
模糊控制器就是将控制量和被控量抽象为模糊量,并通过一定的推理机制处理模糊信息,从而实现系统的控制和调节。
液压机械系统的动力学建模与控制液压机械系统是一种将液体作为传动介质的机械系统,广泛应用于各个工业领域。
液压机械系统的动力学建模与控制是研究该系统性能和稳定性的重要方向。
本文将从动力学建模和控制两个方面讨论液压机械系统的相关问题。
一、液压机械系统的动力学建模液压机械系统的动力学建模是为了描述系统在不同工况下的运动特性和力学行为。
在建模过程中,我们需要考虑液体的力学特性、工作油路的结构和元件的参数等因素。
首先,液体的力学特性对于液压机械系统的动力学建模非常重要。
液体在受力时会产生压力和流速的变化,这些变化需要通过基本的流体力学方程来描述。
例如,连续性方程可以描述液体的质量守恒,动量方程可以描述液体中的力和加速度之间的关系。
其次,液压机械系统的工作油路结构也是建模中需要考虑的因素之一。
液压机械系统通常由液压泵、阀门、液压缸等组成,这些元件之间的连接方式和工作方式会影响系统的动力学行为。
因此,在建模过程中需要根据实际系统的结构来确定合适的数学模型。
最后,液压机械系统的元件参数也需要考虑进动力学建模中。
元件参数包括液压缸的面积、摩擦系数、泵的流量特性等。
这些参数会直接影响系统的响应速度、承载能力和能耗等性能指标。
二、液压机械系统的控制液压机械系统的控制是为了实现对系统运动或力学行为的精确控制。
在控制过程中,我们需要考虑系统的稳定性、鲁棒性和响应速度等因素。
在设计液压机械系统的控制器时,我们可以采用传统的PID控制方法,也可以使用先进的自适应控制方法。
传统的PID控制方法可以根据系统的数学模型设计合适的控制器参数,但对于非线性和时变系统来说,PID控制器的性能可能会有限。
自适应控制方法可以根据实时的系统状态来调整控制器参数,从而提高系统的性能和稳定性。
此外,为了保证系统的鲁棒性和骚扰抑制能力,我们可以采用某些先进的控制策略。
例如,模糊控制、神经网络控制和滑模控制等方法可以通过非线性建模和控制来提高系统的鲁棒性和响应速度,但也需要更高的计算和控制复杂度。