驱动材料的智能摩擦阻尼器试验研究
- 格式:pdf
- 大小:350.10 KB
- 文档页数:5

摩擦阻尼器在工程结构中的研究与应用1史春芳,徐赵东,卢立恒东南大学土木工程学院,江苏南京(210096)E-mail:Shichunfang998@摘要:摩擦阻尼器是一种耗能性能良好、构造简单、制作方便的减震装置。
本文概述了摩擦阻尼器的种类、构造以及减震原理,介绍了摩擦阻尼器的力学模型和结构分析方法。
摩擦阻尼器在实际中得到了大量的工程应用,本文简述了摩擦阻尼器在云南省洱源县振戎中学教学楼和食堂楼中的应用,以及在东北某大楼加固中的应用。
关键词:摩擦阻尼器,耗能减震,计算模型,分析方法中国分类号:P315.9661.引言传统的抗震方法是通过结构本身的塑性变形来耗散地震能量,其实质就是把结构本身及构件作为“消能”元件,这样必然使结构产生不同程度的损坏,甚至产生严重的破坏和倒塌。
结构控制,通过在结构上设置控制装置,由控制机构和结构一起来抵御地震等动力作用,使结构的动力反应减小。
在结构上附加耗能减震装置的减震方法是结构被动控制的一种。
摩擦阻尼器作为一种耗能装置,因其耗能能力强,荷载大小、频率对其性能影响不大,且构造简单,取材容易,造价低廉,因而具有很好的应用前景。
特别是在控制结构近断层地震反应和中高层结构地震反应方面有独特优势。
摩擦阻尼器对结构进行振动控制的机理是:阻尼器在主要结构构件屈服前的预定荷载下产生滑移或变形,依靠摩擦或阻尼耗散地震能量,同时,由于结构变形后自振周期加长,减小了地震输入,从而达到降低结构地震反应的目的。
2.摩擦阻尼器的种类、构造以及减震机理摩擦阻尼器的发展始于20世纪70年代末,随后为适应不同类型的建筑结构,国内外学者陆续研制开发了多种摩擦阻尼器,其摩擦力大小易于控制,可方便地通过调节预紧力大小来确定。
目前,研究开发的摩擦阻尼器主要有:普通摩擦阻尼器、Pall摩擦阻尼器、Sumitomo 摩擦阻尼器、摩擦剪切铰阻尼器、滑移型长孔螺栓节点阻尼器、T形芯板摩擦阻尼器、拟粘滞摩擦阻尼器、多级摩擦阻尼器以及一些摩擦复合耗能器。

《基于摩擦补偿的高精度伺服控制方法研究与实现》一、引言随着现代工业自动化和智能制造的快速发展,高精度伺服控制技术在各个领域的应用越来越广泛。
然而,由于机械系统中存在的摩擦力等因素的影响,伺服系统的精度和稳定性常常受到限制。
为了解决这一问题,本文提出了一种基于摩擦补偿的高精度伺服控制方法,旨在提高伺服系统的性能和精度。
二、相关技术背景伺服控制系统是一种通过反馈控制机制来精确控制机械系统运动的系统。
传统的伺服控制系统主要关注于位置、速度和加速度等控制参数的调节,而忽视了机械系统中存在的摩擦力对系统性能的影响。
摩擦力是机械系统中普遍存在的一种阻力,它会对系统的运动产生干扰,导致系统精度和稳定性的降低。
因此,如何有效地补偿摩擦力成为了提高伺服系统性能的关键问题。
三、基于摩擦补偿的高精度伺服控制方法为了解决上述问题,本文提出了一种基于摩擦补偿的高精度伺服控制方法。
该方法主要包括以下步骤:1. 摩擦力建模:首先,需要对机械系统中的摩擦力进行建模。
通过实验数据和理论分析,建立准确的摩擦力模型,以便后续的补偿操作。
2. 实时监测与补偿:在伺服系统运行过程中,实时监测系统的运动状态和摩擦力的变化情况。
根据监测到的数据,通过控制器对摩擦力进行实时补偿,以减小其对系统运动的影响。
3. 优化控制算法:针对不同的机械系统和应用场景,采用不同的控制算法进行优化。
例如,可以采用模糊控制、神经网络控制等智能控制算法,以提高系统的自适应能力和鲁棒性。
4. 反馈校正:通过引入反馈校正机制,对系统的运动状态进行实时校正。
当系统出现偏差时,通过反馈校正机制对控制参数进行调整,以保证系统的稳定性和精度。
四、实现过程在实际应用中,基于摩擦补偿的高精度伺服控制方法的实现过程主要包括硬件设计和软件设计两个方面。
1. 硬件设计:硬件设计主要包括传感器、执行器、控制器等部分的选型和设计。
传感器用于实时监测系统的运动状态和摩擦力的变化情况,执行器用于驱动机械系统进行运动,控制器则负责根据监测到的数据对系统进行控制和调整。

磁阻尼和动摩擦系数的测定实验报告篇一:《磁阻尼和动摩擦系数的测定实验报告》嘿,亲爱的小伙伴们!今天我要跟你们讲讲我做的那个超级有趣的磁阻尼和动摩擦系数测定实验,你们准备好跟我一起探索这个奇妙的世界了吗?实验开始前,老师把我们分成了几个小组,我和我的小伙伴们眼睛都放光啦,心里想着:这会是一场怎样的冒险呢?我们先把实验要用的器材都准备好,什么光滑的铝板啦,磁铁啦,还有测量长度和质量的工具等等,满满当当摆了一桌子。
我们先研究磁阻尼。
把磁铁从铝板上方一定高度放下去,那一瞬间,我的心都提到嗓子眼了,眼睛紧紧盯着磁铁,心里想着:“它到底会怎么下落呢?会很快吗?”结果,它下落的速度明显比自由落体慢多啦!就好像有一双看不见的手在轻轻地拉住它。
这难道不神奇吗?接着测动摩擦系数。
我们把一个小木块放在铝板上,用弹簧测力计慢慢地拉它。
我一边拉一边对小伙伴说:“嘿,你看这测力计的示数,是不是在变化呀?”小伙伴着急地说:“哎呀,你拉慢点,不然数据不准啦!”就这样,我们费了好大的劲儿,才得到了一组组的数据。
在实验过程中,可不是一帆风顺的哟!有好几次,我们的数据都不太对,急得我们抓耳挠腮。
我忍不住抱怨:“这实验怎么这么难呀!”但是,大家都没有放弃,互相鼓励着:“加油,咱们一定能成功的!”经过一次又一次的尝试,我们终于完成了实验。
看着那密密麻麻的数据,就像打了一场大胜仗得到的战利品。
我们开始整理和计算,这可真是个细致活,稍微不小心就会出错。
当算出最后的结果时,我们高兴得差点跳起来!你能想象那种感觉吗?就好像在黑暗中摸索了好久,终于找到了光明的出口。
通过这个实验,我深深地感受到,科学就像一座神秘的城堡,里面充满了无数的宝藏等着我们去挖掘。
每一次的实验,都是一次探索的旅程,有困难,有挫折,但只要坚持下去,就一定能有所收获。
小伙伴们,你们难道不想也来体验一下这样有趣又充满挑战的实验吗?我的观点是:这个实验不仅让我学到了知识,还让我明白了团队合作和坚持不懈的重要性。
摩擦阻尼器耗能减震的研究综述吴忠坤发布时间:2021-08-10T06:57:40.840Z 来源:《基层建设》2021年第15期作者:吴忠坤[导读] 地震灾害具有突发性和不可预测性,对结构进行抗震设计是有效的防震措施。
在实际工程中,利用附加阻尼器对结构进行被动控制成为工程中常用的减震方法广州大学土木工程学院广东广州 510006摘要:地震灾害具有突发性和不可预测性,对结构进行抗震设计是有效的防震措施。
在实际工程中,利用附加阻尼器对结构进行被动控制成为工程中常用的减震方法,该方法由于其经济有效而被越来越多的工程结构所采用。
其中,摩擦阻尼器由于其构造简单、价格低廉、耗能能力强,具有良好的发展前景。
本文从传统抗震方法和现代抗震理念对比分析了阻尼器在耗能减震中的优势,及摩擦阻尼器的种类、构造和减震原理。
关键词:抗震加固;消能减震;摩擦阻尼器一、引言地震是目前人类尚难以完全抗御的主要灾害之一,对人类的生命和社会财富造成了巨大的危害。
因此,对结构进行抗震设计尤为重要。
传统的抗震设计方法依靠构件的弹塑性变形来吸收地震能量,本质上就是把结构本身作为效能部件。
一方面这样不可避免地会对结构自身造成一定的损伤,甚至倒塌;另一方面随着建筑技术的发展,人们对于建筑的要求也越来越高,传统的抗震设计方法已无法满足现有的抗震理念。
合理有效的现代抗震措施是采取结构振动控制技术,即在结构上安装耗能装置,由结构和耗能装置共同耗能来抵御地震作用[1]。
而摩擦阻尼器作为一种耗能装置,其具有强大的能耗能力,负载的大小和频率对其功能影响不大,并且结构简单,材料选择简单,成本低廉,具有良好的应用前景。
特别地,在控制结构的近断层地震响应以及中高层结构的地震响应等方面都具有优势。
二、耗能减震的必要性近年来,随着建筑业发展的突飞猛进,建筑结构愈来愈朝着大跨度的方向发展,结构复杂化、多元化,也使得传统的消能减震方式变得难以满足结构的抗风抗震需求。
对于结构体系复杂,例如多层超高层结构,更加是一种挑战。
第27卷第lO期振动与冲击JOURNAl.OFVIBR^TIONANDSHOCK基于微驱动材料的智能摩擦阻尼器试验研究关新春1,郭鹏飞1,吴阳1,欧进萍h2(1.哈尔滨工业大学土木工程学院,哈尔滨150090:2.大连理工大学土木1=程学院,大连116024)摘要:摩擦阻尼器结构简单、安装容易、性能稳定,具有广泛的应用领域。
传统摩擦阻尼器。
因阻尼力不具备调节能力,而只能对结构的振动产生有限的控制效果。
压电材料和磁致伸缩材料分别具有在电场或磁场激励作用下的快速变形能力,是两类重要的智能材料。
利用以上两类智能材料制成的驱动器,调节摩擦阻尼器摩擦面的正压力,进而达到调节摩擦力的目的,是实现摩擦阻尼器智能化的重要途径。
利用三个形状基本相同,材质分别为Terfenol-D金属、树脂基磁致伸缩复合材料以及压电陶瓷制成的驱动器,与同一参数的摩擦阻尼器复合,制成了三个阻尼力可调的智能摩擦阻尼器,并完成了它们的阻尼力及响应时间测试。
结果表明,利用Terfen01.D驱动器复合的阻尼器(GMM摩擦阻尼器)具有最大的绝对出力和可调范围,利用树脂基磁致伸缩驱动器复合的阻尼器(GMPC摩擦阻尼器)次之,利用压电陶瓷驱动器复合的阻尼器(PZT摩擦阻尼器)最弱。
GMM阻尼器和PZT阻尼器的响应时间分别在60ms一80ms以及30Ins左右。
关键词:摩擦阻尼器;压电驱动器;磁致伸缩;滞回性能;响应时间中图分类号iTB381。
TH703.62文献标识码:A由于具有结构简单、造价低、维护费用少、阻尼力大等特性,摩擦阻尼器已成为结构抗震设计和震后修复的重要装置之一。
摩擦阻尼器耗能效果取决于它的摩擦力与摩擦滑移,而摩擦力又正比于摩擦系数和螺栓的紧同力。
在大紧固力下,小扰动不会造成阻尼器滑移,也并不耗能;在小紧固力下,虽然会有滑移,但总的能量还是不高¨一o。
为了改善摩擦阻尼器的性能,变摩擦阻尼器的概念应运而生。
已开发的变摩擦阻尼器主要分为两类,一类是通过液体或气体压力的改变,实时调节摩擦面上的正压力;另一类是利用新型智能材料的微驱动特性,实时调节螺栓的紧固力。
前者属于传统机械范畴,系统复杂、响应时间长;后者结构简单、响应迅速,是变摩擦阻尼的新兴研究热点¨。
61。
已有智能型摩擦阻尼器主要是采用压电驱动器与摩擦阻尼器复合,而对于利用磁致伸缩驱动器与摩擦阻尼器的复合研究却鲜有报导"一3I。
磁致伸缩材料是一类重要的智能材料,与压电材料相似的是,在外场激励下,它可在微秒级的时间内,改变长度;与压电材料不同的是,其激励外场是磁场不是电场。
在外场激励下,商品化的磁致伸缩材料一纯Terfenol—D金属的最大变形能力远大于一般的压电陶瓷驱动器。
本文将利用材质分别为Terfenoi-D金属、树脂基磁致伸缩复合材料以及压电陶瓷制成的驱动器,与同一参数的摩擦阻尼器复合,制成i个相近的阻尼力可调的智能摩擦阻尼器,完成它们的滞回力及响应时间测基金项目:国家自然科学基金项目(50478024:50738002);倒家重点基础研究发展计划(973计划)资助项目(2007CB714204)收稿日期:2007—12—28修改稿收到日期:2008—01—21第一作者关新春男,博士.副教授,博士生导师,1973年2月生试,并分析各个阻尼器之间的性能特点。
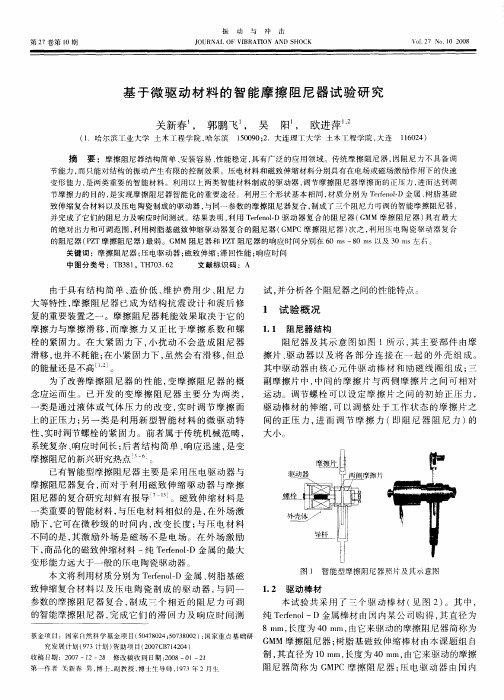
1试验概况1.1阻尼器结构阻尼器及其示意图如图l所示,其主要部件由摩擦片、驱动器以及将各部分连接在一起的外壳组成。
其中驱动器由核心元件驱动棒材和励磁线圈组成;三副摩擦片中,中间的摩擦片与两侧摩擦片之间可相对运动。
调节螺栓可以设定摩擦片之间的初始正压力,驱动棒材的伸缩,可以调整处于工作状态的摩擦片之间的正压力,进而调节摩擦力(即阻尼器阻尼力)的。
大小。
擦片图l智能型摩擦阻尼器照片及其示意图1.2驱动棒材本试验共采用了三个驱动棒材(见图2)。
其中,纯Terfenol—D金属棒材由国内某公司购得,其直径为8mm,长度为40mm,由它来驱动的摩擦阻尼器简称为GMM摩擦阻尼器;树脂基磁致伸缩棒材南本课题组自制,其直径为10mm,长度为40mm,由它来驱动的摩擦阻尼器简称为GMPC摩擦阻尼器;压电驱动器由国内第10期关新春等:基于微驱动材料的智能摩擦阻尼器试验研究19某公司购得,其基本参数如表1所列,由它来驱动的摩擦阻尼器简称为PZT摩擦阻尼器。
图3列出了两类磁致伸缩材料的变形能力,图中用于标注的应力值指的(a)Terfenol—D棒表1压电驱动器基本参数是磁致伸缩驱动器的预压力。
此外,磁致伸缩驱动器的激励电磁线圈是内径为11mm、外径为61mm、长度为40mm的圆环柱。
(b)树脂基超磁致伸缩棒(c)压电驱动器图2驱动棒材照片E金钗捌对匀速运动过程中,瞬间调整激励电/磁场,测试随时间变化的阻尼力。
从阻尼力与时间的关系曲线上,分析阻尼力从一个稳定状态到另一个稳定状态的时间。
磁场强度(kA/m)图3磁致伸缩材料的变形性能2试验结果1.3试验方法试验在哈尔滨工业大学材料学院的MTS810试验机上完成(见图4)。
滞回阻尼力测试过程为:固定初始正压力和激励电/磁场,通过MTS810试验机使中间摩擦片与两侧摩擦片之间产生相对正弦运动,并同时测试相对运动产生的阻尼力。
响应时间的测试过程为:同定初始正压力,在MTS810试验机使中间摩擦片与两侧摩擦片之间产生相互R掣理位移/ram(a)频率为0.03Hz至杂型蛊图4试验照片2.1滞回力测试了阻尼器在不同的电/磁场驱动下,振幅为5mm和10mm,频率介于0.03Hz到9Hz之间的几个频率下的滞回性能。
其中阻尼器在驱动器不工作的初始状态的阻尼力调整为40N左右。
由于初始状态摩擦力的大小是通过调节螺栓完成的,其精度并不能做到各工况完全相同。
图5至图7列出了阻尼器在0.03Hz、0.2Hz以及1Hz下的试验结果,其它工况下的试验结果基本相同,更多试验结果见参考文献[14]。
位移/ram(b)频率为0.2Hz图5GMM摩擦阻尼器阻尼力性能Z芒R掣彦∞∞∞∞∞∞∞∞O№∞他m8642振动与冲击2008年第27卷蚤R掣盈互R鹫爱位移/ram(a)频率为IJ.03Hz位移/mm(a)频率为0.03Hz堇穴世碰位移/ram(b)频率为0.2Hz图6GMPC摩擦阻尼器阻尼力性能番R世蛊位移/mm(b)频率为0.2Hz图7PZT摩擦阻尼器阻尼力性能图5一图7的试验结果表明:1)对于同一驱动棒材,不同工况下的试验结果,虽然零电/磁场下初始摩擦力略有区别,但相同电/磁场下,阻尼力的绝对变化值基本相同。
这说明,在相同电/磁场激励下,驱动棒材的变形量基本相同。
2)在所测试的范围内,频率对阻尼力没有影响;3)由于静态摩擦系数远大于动态摩擦系数,阻尼器在运动换向时(即位移最大点)的阻尼力比阻尼器平稳运动状态下的阻尼力大得多。
4)除去最大位移附近的数据点,各阻尼器在平稳状态下的阻尼力平均值的数值如表2所列。
它们表明,在相近的情况下,产生可调阻尼力的绝对值和可调倍数的能力由大至llsJ,依次是纯Terfen01.D金属棒、树脂基磁致伸缩棒和压电驱动器。
表2智能摩擦阻尼器主要性能2.2响应时间测试了摩擦片间相对运动速度为lmm/s和10mm,/s时,不同阶跃电流变化幅值时的响应时间。
理论和试验均表明,GMM阻尼器和GMPC阻尼器的响应时间主要是受电磁线圈电感的影响,其数值及其特征堇R掣蛊重杂世矗(c)频率为1Hz(c)频率为1Hz基本相同。
因此,对于磁致伸缩类智能阻尼器,本试验只系统地测试了GMM阻尼器的响应时间。
典型的试验曲线如图8所示。
堇。
糍世||sl}sGMM阻尼器PZT阻尼器图8阻尼力随电流变化的时程曲线响应时间具有一定的离散性,图9列出了阻尼器在10mm/s速度下的8次不同的试验结果,更多的试验结果见参考文献[14]。
0.O.争莒0.塾巨O.O.试验次数试验次数GMM阻尼器PzT阻尼器图9阻尼器响应时间图9表明:1)磁致伸缩摩擦阻尼器的平均响应时间在60ms一80ms之间,且电流变化的幅值越大,响应时间第lO期关新春等:基于微驱动材料的智能摩擦阻尼器试验研究2l也越长;2)压电驱动器的响应时间在30ms左右。
响应时间和电压变化值之间的关系不大。
压电驱动器为电容性负载,其横截面积越大、叠层数越多,电容也越大,相应的响应时间也越长,其响应时间一般为0.1ms一10ms。
PZT阻尼器响应时间达到30ms左右的原因,可能是其电源驱动器响应滞后造成的。
磁致伸缩材料的响应时间比压电驱动器还低l到两个数最级,但GMM阻尼器的响应时间却高于PZT阻尼器的原因应该是由于电感的存在,线圈的电磁转换过程较长造成的。
磁致伸缩阻尼器响应时间随电流变化幅值的增大而增加的原因,可进一步佐证是线圈的电磁转换过程延长了GMM阻尼器响应时间。
图10列出了电/磁场变化幅值相同,阻尼器在不同速度情况下的响应时间。
图10中的结果表明,在本文的两种试验工况下,摩擦片间相对运动速度越快,响应时间就越短。
O・0-差。
莒0.骱毫0.试验次数GMM阻尼器::霉0.图lO阻尼器响应时间3分析与讨论PZT阻尼器3.1阻尼力的影响因素基于微驱动器的智能摩擦阻尼器的可调阻尼力,正比于处于工作状态下的微驱动器的推力,此推力的最大值计算公式为¨41r厶1F=ki占。
z。
I1一击l(1)‘托i+丘e1式中,占。
,为驱动器最大自由应变;Z。
为驱动器长度。
ki是驱动器刚度;.|},是驱动器外部约束刚度。
式(1)表明,在驱动器长度、刚度以及其外部约束刚度相同的情况下,驱动器最大自由应变占。
,越大,驱动器的推力也越大。
在本次试验中,三个驱动器的形状基本相同,压电驱动器的最大自由应变较小,因此其产生的最大可调力也就比较小;与纯Terfenol—D金属相比,树脂基磁致伸缩复合材料的弹性模量以及极限应变均较小,因此,其出力的性能也略低。
3.2不同驱动器之间的比较1)压电驱动器只需外接两根提供电压的导线,由于不用设计考虑电磁线圈,因此利用其来复合的摩擦2)由于压电PzT材料电阻率很大,压电驱动器的驱动能耗非常低;而磁致伸缩类驱动器(Terfenol—D棒或树脂基磁致伸缩复合棒)需要非常高的磁场来驱动,用于产生强磁场电磁转换的励磁线圈,会产生较大的电热损耗在工作状态下会产生较大的能力消耗。
3)显著的压电效应需要极高的电场,为了降低电源的电压,压电驱动器一般做成叠片式,即使这样,驱动电源的最高电压一般也需要达到100V到300V。
其造价较用于磁致伸缩类驱动器的低压大电流电源高得多。
4)Terfen01.D金属的主要成分是稀有金属,其造价比较高,但压电驱动器的制备工艺不仅牵涉到极化的问题,还需要将毫米级的薄片粘贴在一起,因此相同规格的驱动器,压电驱动器造价更高一些。