本体系统功能
- 格式:ppt
- 大小:898.00 KB
- 文档页数:17
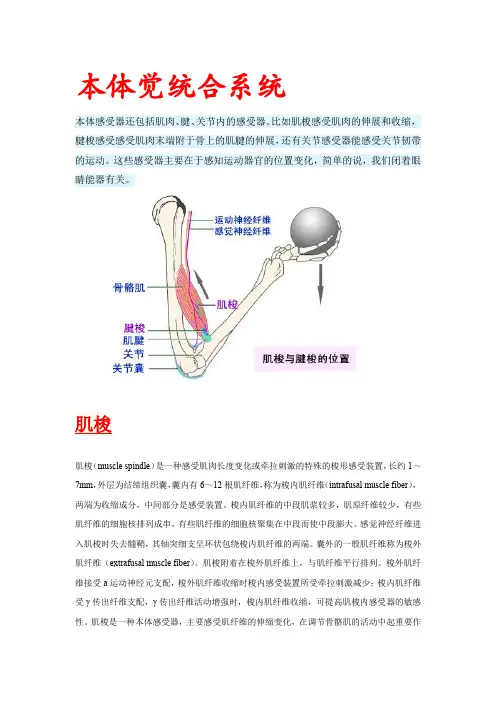
本体觉统合系统本体感受器还包括肌肉、腱、关节内的感受器。
比如肌梭感受肌肉的伸展和收缩,腱梭感受感受肌肉末端附于骨上的肌腱的伸展,还有关节感受器能感受关节韧带的运动。
这些感受器主要在于感知运动器官的位置变化,简单的说,我们闭着眼睛能器有关。
肌梭(muscle spindle)是一种感受肌肉长度变化或牵拉刺激的特殊的梭形感受装置,长约1~7mm,外层为结缔组织囊,囊内有6~12根肌纤维,称为梭内肌纤维(intrafusal muscle fiber),两端为收缩成分,中间部分是感受装置。
梭内肌纤维的中段肌浆较多,肌原纤维较少,有些肌纤维的细胞核排列成串,有些肌纤维的细胞核聚集在中段而使中段膨大。
感觉神经纤维进入肌梭时失去髓鞘,其轴突细支呈环状包绕梭内肌纤维的两端。
囊外的一般肌纤维称为梭外肌纤维(extrafusal muscle fiber)。
肌梭附着在梭外肌纤维上,与肌纤维平行排列。
梭外肌纤维接受a运动神经元支配,梭外肌纤维收缩时梭内感受装置所受牵拉刺激减少;梭内肌纤维受γ传出纤维支配,γ传出纤维活动增强时,梭内肌纤维收缩,可提高肌梭内感受器的敏感性。
肌梭是一种本体感受器,主要感受肌纤维的伸缩变化,在调节骨骼肌的活动中起重要作用,主要分布于抗重力肌,体位变时肌肉受牵拉变长,梭内肌受牵拉,感受装置敏感性增高,传出神经发出的冲动增多,到达脊髓后,经传出神经纤维使肌肉收缩。
腱梭腱梭(tendon spindle,tendon organ of Golgi)分布在腱胶原纤维之间,与梭外肌纤维串联,纺锤形腱梭的腱纤维束上,缠绕着感觉神经末梢,与肌梭的构造相似,这最初是由高尔基(C.Golgi)记述的。
腱梭是一种张力感受器。
当肌肉收缩张力增加时,腱梭因受到刺激而发生兴奋,冲动沿着感觉神经传入中枢,反射性地引起肌肉舒张。
与肌梭不同,它不受传出性神经的支配。
肌梭和腱梭一起作为本体的反射感受器,对动物的保持姿势和协调运动,具有重要的作用。
人的各个系统器官和组织的生理功能人类的各个系统器官和组织在身体的运作中起着至关重要的作用,它们协同工作,维持着人体的正常生理功能。
以下将分别描述这些器官和组织的功能和作用。
1. 呼吸系统:呼吸系统包括鼻腔、喉咙、气管、支气管和肺部等器官。
它的主要功能是吸入氧气,将氧气输送到体内的细胞,并排出二氧化碳。
通过呼吸作用,人体维持着氧气和二氧化碳的平衡,保持正常的新陈代谢。
2. 循环系统:循环系统由心脏、血管和血液组成。
心脏是循环系统的中心,它通过收缩和舒张的动作将氧气和养分富含的血液输送到全身各个部分。
血液通过血管循环,将氧气和营养物质输送到组织和细胞,同时将代谢产物和废物带回肺部和肾脏进行排除。
3. 消化系统:消化系统包括口腔、食道、胃、肠道和胰腺等器官。
它的主要功能是将食物分解为营养物质,使其能够被身体吸收和利用。
口腔中的唾液能够分解淀粉和蛋白质,胃和肠道中的酶能够分解脂肪、碳水化合物和蛋白质。
消化系统还吸收水分和电解质,并将未消化的残渣排出体外。
4. 泌尿系统:泌尿系统由肾脏、膀胱、尿道和输尿管等组成。
它的主要功能是排除体内的废物和多余的水分,同时维持体内的水电解质平衡。
肾脏是泌尿系统的核心,通过滤波作用将废物和过剩的物质排出体外,同时重新吸收和保留身体需要的物质。
5. 神经系统:神经系统由大脑、脊髓和神经组织组成。
它负责传递和处理信息,控制和协调身体的各种活动和功能。
大脑是神经系统的中枢,它接收来自感觉器官的信息,并通过神经细胞的传递将指令发送到各个部位。
脊髓负责传递信息和控制肌肉的活动。
6. 内分泌系统:内分泌系统由各个内分泌腺和激素组成。
它的主要功能是分泌激素,调节和控制身体的生理和代谢过程。
内分泌腺包括甲状腺、肾上腺、胰岛和性腺等,它们分泌的激素可以影响生长发育、代谢、免疫和生殖等方面的功能。
7. 免疫系统:免疫系统由淋巴组织、淋巴管和淋巴细胞等组成。
它的主要功能是保护身体免受病原体和异物的侵害。
汽轮机本体保护系统(ETS)逻辑功能完善作者:王轶来源:《科学导报·学术》2020年第49期摘要:从整个汽轮机运行过程中能够看出,ETS保护系统的应用显得十分重要,除了保证生产效率和电能质量外,还能控制成本,强化系统逻辑功能的完善性。
本文根据以往工作经验,对汽轮机本体保护系统中的常见问题进行总结,并从适当增加汽轮机润滑油压低二值压力开关、ETS系统修改情况、硬接线回路、ETS保护控制逻辑、抗雷击干扰改造五方面,论述了汽轮机本体保护系统(ETS)逻辑功能完善方式。
关键词:汽轮机;保护系统;逻辑功能现阶段,随着社会经济的不断发展,高压输电线路工程数量逐步提升,其中涉及到的建设规模也处于扩增状态。
在实际高压输电线路施工上,企业需要尽可能提升施工管理力度,让工程质量和成本等均得到有效控制。
更为重要的,该类工作属于是密集型劳动产业,时间和地域等方面的跨度较大,甚至还存在一些高空作业情况,施工人员需要具备专业的施工能力,为后续系统的安全运行提供基础。
1.ETS保护系统概况为了方便研究,本文以某电厂ETS保护系统为了,该ETS保护系统型号为3701。
3701ETS保护系统在使用过程中,主要包括3套独立部分,各个部分均有CPU模块、DI和DO模块组成,在输出上,以三选二模块表决为主。
纵观整个软件平台的运行过程,主要应用的是GE新华OC6000e系统,在使用时,能够将汽轮机发电机组跳闸停机信号综合其中,按照之前设定好的冗余准则,在经过三选二模块表决后,以新的逻辑形式向外输出,让4个停机电磁阀处于良好的运行状态,将所有进气阀门关闭,维护设备和工作人员的安全。
2.汽轮机本体保护系统中的常见问题首先,ETS系统之中的汽轮机润滑油压保护系统设计时,往往只会设计一个润滑油压低一值,和润滑油压低二值相与后输出,这与实际要求并不同步。
其次,在ETS系统之中,汽轮机凝汽器真空保护系统亦是如此,设置一个凝汽器真空低一值和凝汽器真空低二值压力开关,在停机信号发送上,主要是由凝汽器真空低一值和低二值相与后实现成功输出。
基因本体论(go)功能注释 gene ontologyannotation基因本体论(Gene Ontology,简称GO)是一种用来描述基因功能的标准化系统。
GO的功能注释则是使用GO术语为基因或蛋白质序列进行注释,帮助科学家理解生物体内基因的功能和相互关系。
本文将介绍基因本体论(GO)的概念和作用,以及基因本体论功能注释的流程和应用。
一、基因本体论(GO)的概念和作用基因本体论(GO)是一种标准化的词汇系统,用于描述基因和蛋白质的功能、过程和组件。
GO包含三个主要的本体:分子功能(Molecular Function)、生物过程(Biological Process)和细胞组件(Cellular Component)。
每个本体都包含一系列术语和相应的定义,科学家可以根据这些术语和定义来描述基因的功能。
基因本体论的作用是帮助科学家对基因和蛋白质进行分类和理解。
通过将基因和蛋白质注释到GO术语上,科学家可以更准确地了解它们的功能、参与的生物过程以及位于细胞的哪个组件。
这对于研究基因的功能以及疾病的发生和发展有着至关重要的意义。
二、基因本体论功能注释的流程基因本体论功能注释是指将基因或蛋白质序列与基因本体论术语进行关联的过程。
下面是一般的基因本体论功能注释流程:1.数据预处理:获取待注释基因或蛋白质的序列数据,排除冗余数据和噪音数据。
2.基因本体论术语获取:从基因本体论数据库中获取相应的术语,包括分子功能、生物过程和细胞组件。
3.序列比对:将待注释的基因或蛋白质序列与已知序列进行比对,找出相似序列。
4.注释:根据序列比对的结果,将相似序列的注释信息转移到待注释序列上。
5.术语关联:根据注释信息,将待注释基因或蛋白质与相应的基因本体论术语进行关联。
6.结果验证:对注释结果进行验证和统计分析,评估注释的准确性和可靠性。
三、基因本体论功能注释的应用基因本体论功能注释在生命科学研究中有着广泛的应用。
以下是一些常见的应用领域:1.基因功能研究:通过注释基因的功能,科学家可以更好地理解基因在细胞中的作用,从而揭示生物体内复杂的生物过程。
陈达德关于孩子感知觉文章(转帖)台湾陈达德有关孩子感知觉的文章专栏身体概念不良---本体系统功能障碍---前台北台安医院小儿复健科主任陈达德上海火马儿童发展中心医疗顾问前言身体概念是儿童动作操作以及学习表现的最根本基础,同时却也是家长所最不了解且最缺乏概念的发展领域之一。
家长常常会发现并抱怨孩童有容易跌倒、频繁受伤、动作迟钝、操作笨拙、学习障碍等等常见问题发生,并时常会归诸于粗心、不专心、行为问题、智力问题等因素,因而执行不适切的处置与结论,使得孩童问题无法有效解决且严重影响亲子互动质量。
而事实上,这些看似复杂且困难的种种问题,其实原因很可能只是单纯的身体概念不良,而藉由全盘的了解与正确的介入,不但可以改善及解决这些问题,更能有效地提升孩童的生活与学习的表现成效,藉此大幅地增进并改善孩童的生活质量以及亲子关系。
机制本体系统横跨了中枢神经系统(CNS, central nerve system)以及周边神经系统(PNS, peripheral nerve system),其主要功能在于传递并解释个体相关的本体信息以利产生合宜、有效的动作表现。
本体系统在中枢神经系统内主要是位于大脑前脑的动作区(motor area)以及动作前区(pre-motor area),在周边神经系统则是主要分布于肌肉以及关节深处的本体受器。
不论当个体在静止或动作时,位于全身肌肉及关节深处的本体受器都会持续地散发本体刺激,并经由后内侧丘系路径(posterior-lemniscal pathway)将相关刺激讯息传递到丘脑thalamus,之后再由此传递到大脑皮层的动作前区与动作区,使各体能清楚了解身体各部位当时的分布情形与施受力状态,并藉此为依据来有效且精确地掌握并控制身体各部位的动作以及个体整体的行为反应,而这种对于全身身体部位的了解与掌控,就是身体概念(body image)。
而藉由大肌肉以及大关节的施力或受力,以及充足与多元的运动与活动量,可促使孩童逐渐发展出清晰且细密的身体概念,一但孩童对于肢体的了解越详细,其对于肢体的使用则会变得更细致精确且更有效率。
数控加工工艺系统的组成一、引言数控加工技术是现代制造业中不可或缺的重要组成部分,它能够实现高精度、高效率、高质量的加工过程。
数控加工工艺系统是数控加工技术的关键支撑,其包括了多个部分组成。
本文将详细介绍数控加工工艺系统的组成及其各个部分的功能。
二、数控机床数控机床是数控加工技术中最核心的设备之一,它能够实现对零件进行高精度、高效率的切削加工。
数控机床由机床本体、CNC系统和驱动系统三部分组成。
1. 机床本体机床本体是指固定在地面上的整体结构,包括了主轴箱、滑枕箱、床身等部分。
机床本体需要具备足够的刚性和稳定性,以保证在高速切削时不会发生振动和变形。
2. CNC系统CNC系统是指计算机数字控制系统,它通过对程序进行解释和执行来实现对数控机床运动轴的精确控制。
CNC系统需要具备良好的稳定性和可靠性,并且需要支持多种编程方式。
3. 驱动系统驱动系统是指将CNC系统发出的指令转化为电气信号,控制数控机床各个运动轴的运动。
驱动系统需要具备高精度、高速度和高可靠性,以保证数控机床的稳定运行。
三、刀具系统刀具系统是指数控机床上用于进行切削加工的刀具及其附件。
刀具系统包括了主轴、夹头、刀柄、切削刃等部分。
1. 主轴主轴是指数控机床上用于安装和转动刀具的部件,它需要具备足够的承载能力和旋转精度,以保证加工过程中不会发生偏差或抖动。
2. 夹头夹头是指用于固定和夹紧刀柄或工件的部件,它需要具备良好的夹紧力和稳定性,并且需要支持快速换刀功能。
3. 刀柄刀柄是指连接主轴和切削刃之间的部件,它需要具备足够的强度和稳定性,并且需要适配不同类型的主轴和夹头。
4. 切削刃切削刃是指用于进行实际切削的部件,它需要具备足够的硬度、耐磨性和切削性能,以保证加工过程中能够保持高效率和高质量。
四、工艺规划系统工艺规划系统是数控加工工艺系统中重要的辅助部分,它能够对加工过程进行优化和规划,提高加工效率和质量。
工艺规划系统包括了CAD/CAM软件、NC程序生成器等部分。
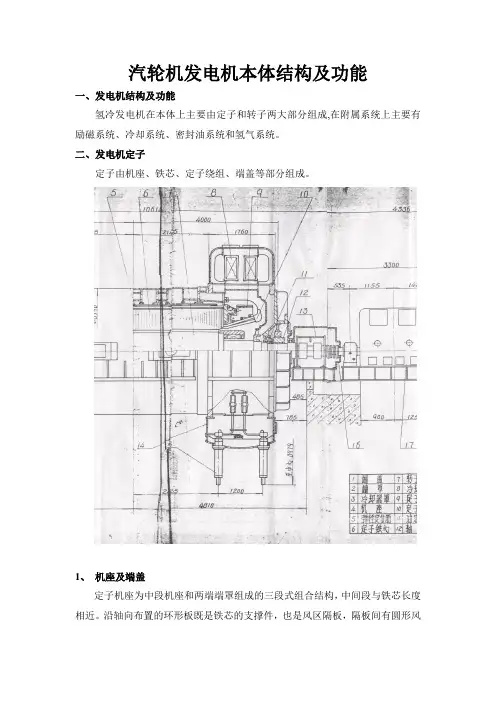
汽轮机发电机本体结构及功能一、发电机结构及功能氢冷发电机在本体上主要由定子和转子两大部分组成,在附属系统上主要有励磁系统、冷却系统、密封油系统和氢气系统。
二、发电机定子定子由机座、铁芯、定子绕组、端盖等部分组成。
1、机座及端盖定子机座为中段机座和两端端罩组成的三段式组合结构,中间段与铁芯长度相近。
沿轴向布置的环形板既是铁芯的支撑件,也是风区隔板,隔板间有圆形风管。
两端端罩罩住定子线圈端部,4个卧式冷却器置于两端罩顶部的冷却器罩内。
三段式机座之间用螺栓把合,各接合面处除用橡胶圆条密封外,还用气密罩封焊,端罩两侧下部设有排水法兰,接液位信号器,冷却器漏水可及时报警。
整个机座按防爆要求设计,具有足够的强度和良好的气密性,经受1.0兆帕30分钟的水压试验和4×105帕气密试验。
2、机座的作用:主要是支持和固定铁芯绕组。
如果用端盖轴承,它还要承受转子的重量和电磁力以及分配冷却气流力矩。
(特别是在发电机出口短路后要承受10倍以上的短路力矩的作用),除此以外,还要防止漏氢和承受住氢气的爆炸力。
3、定子弹性支撑:为了减少发电机运行时定子铁芯所产生的双倍频的振动对发电机基础的影响,铁芯与机座之间采用轴向组合式弹性定位筋作为隔振结构。
两个主要振动源:一是铁芯振动,其振动频率为二倍频100HZ。
这因为在二极发电机中,由于发电机转子磁场的影响,机座和定子铁芯将受到100HZ的交变电磁力的作用,并使定子铁芯变成一个不断变化的椭圆,使机座发生倍频振动。
二是转子振动,这通常只发生在轴承与端盖合成一体的发电机上,它起因于转子的各种不平衡,其频率为50HZ,即转子的机械旋转频率。
所以说机座都是为高强度优质钢板焊接而成。
4、端盖:端盖是发电机密封的一个组成部分,它分为内端盖和外端盖,为了安装,检修,拆装方便,一般端盖由上下两半构成。
外端盖采用钢板焊接而成,内端盖由铝合金或玻璃钢板压铸而成。
外端盖的作用:密封、支承(转子)、防爆的作用。

机器人本体的五大组成
机器人本体包括:驱动系统、机械系统、传感系统、控制系统和系统接口五大部分组成,下面来分类讲一下机器人本体包括哪几部分。
1、机械系统:机器人的机械本体机构基本上分为两大类,一类是操作本体机构,它类似人的手臂和手腕,另一类为移动型本体结构,主要实现移动功能。
2、驱动系统:工业机器人驱动系统又叫伺服单元的作用是使驱动单元驱动关节并带动负载按预定的轨迹运动。
已广泛采用的驱动方式有:液压伺服驱动、电机伺服驱动,气动伺服驱动,市场上主流的伺服电机厂家有安川、三菱、松下等。
3、控制系统:各关节伺服驱动的指令值由主计算机计算后,在各采样周期给出。
机器人通常采用主计算机与关节驱动伺服计算机两级计算机控制,计算机控制系统包括电机驱动软件和轨迹控制软件。
4、传感系统:除了关节伺服驱动系统的位置传感器(称作内部传感器)外,还需要搭配视觉、力觉、触觉、接近等多种类型的传感器(称作外部传感器)。
5、输出/输入系统接口:为了与周边系统及相应操作进行联机与应答,会开放各种通信接口和人机通信装置。
锅炉房主要系统简介1 锅炉概述1.1锅炉简介锅炉利用燃料燃烧放出的热量生产热水和蒸汽,是一种将燃料的化学能转化为热能的设备。
“锅”指盛水或汽的部分,其作用是吸收燃料放出的热量并传给水,产生水蒸气;“炉”指燃料和烟气流通的通道,其作用是使燃料与空气混合、燃烧并释放出热量。
锅炉中产生的热水或蒸汽可直接为工业生产和人民生活服务,可用以工业加热、烘干、蒸煮、消毒等,也还可供给用户用以采暖、空调、通风、制冷,我们把用于此种用途的锅炉称为供热锅炉或工业锅炉。
此外,锅炉产生的蒸汽也可通过蒸汽动力装置转换为机械能,或再通过发电机将机械能转换为电能,此种用途的锅炉称之为动力锅炉。
热水锅炉主要用于生活,工业生产中也有少量应用。
蒸汽锅炉常简称为锅炉,多用于火电站、船舶、机车和工矿企业。
1.2锅炉分类锅炉的分类方法很多,可以按锅炉的用途分,也可以按锅炉的结构、燃料种类分,还可以按水循环形式、压力分类。
1、按锅炉用途分类锅炉可以作为热能动力锅炉和供热锅炉。
动力锅炉包括电站锅炉、船舶锅炉和机车锅炉等,相应用于发电、船舶动力和机车动力。
供热锅炉包括蒸汽锅炉、热水锅炉、热管锅炉、热风炉和载热体加热炉等,相应地得到蒸汽、热水。
热风和载热体等。
2、按锅炉本体结构分类按锅炉结构分,主要分为火管锅炉和水管锅炉。
火管锅炉包括立式锅炉和卧式锅炉,水管锅炉包括横水管锅炉和竖水管锅炉。
3、按锅炉用燃料种类分类按锅炉用燃料种类分类为燃煤锅炉、燃油锅炉和燃气锅炉以及燃煤锅炉的升级技术,油气炉的替代产品---煤粉锅炉,煤气双用锅炉等。
燃煤锅炉按燃烧方式可以分为层燃锅炉、室燃锅炉和沸腾锅炉。
最新燃料为醇基燃料锅炉,他将大大减少燃煤锅炉对大气环境的污染。
4、按锅炉容量分类蒸发量小于20t/h的称为小型锅炉、蒸发量大于75t/h的称为大型锅炉,蒸发量介于两者之间的称为中型锅炉。
5、按锅炉压力分类2.5MPa以下的锅炉称为低压锅炉,6.0MPa以上的称为高压锅炉,压力介于两者之间的称为中压锅炉。
人体各个系统的组成和功能
人体通常由九个系统组成,即循环系统、运动系统、消化系统、呼吸系统、泌尿系统、生殖系统、内分泌系统、神经系统和感觉器。
1.循环系统:循环系统最基本的功能是将血液泵送到身体的各个部位。
心脏骤停几秒钟后会失去知觉,所有器官和组织都需要有氧供血和废物清除。
2.运动系统:肌肉占人体体积的一半,它和骨骼一起产生运动。
特殊心肌和所有平滑肌等非随意肌为呼吸系统、心血管系统和消化系统提供动力。
3.消化系统:主要由消化管和消化腺组成。
消化管通常是指从口腔到肛门的管道,包括口腔、咽、食管、胃、小肠和大肠;消化腺主要包括肝脏、胰腺、口腔腺以及消化管壁上的一些小腺体,如唇腺、肠腺、食道腺等。
4.呼吸系统:呼吸道和呼吸肌的共同作用,使空气进出肺部,进行气体交换。
心血管系统将气体输送到身体的各个部位,供应新鲜氧气,排出二氧化碳。
5.泌尿系统:包括肾脏、输尿管、膀胱和尿道。
在机体代谢过程中,排出多余的水分和代谢废物,保持机体内环境稳定。
6.生殖系统:生殖系统不同于其他系统。
它的作用只在人的一生中的某个时期体现出来。
它也是唯一一个可以通过手术移除而不会威胁到人们生命的系统。
7.内分泌系统:属于机体的调节系统,与神经系统共同作用,维
持人体内环境的稳定,调节人体的生长发育、生殖和各种代谢活动。
8.神经系统:大脑是意识和创造的地方。
大脑还通过脊髓和神经分支控制整个身体的运动。
神经系统与内分泌腺一起调节和维持其他系统。
9.感觉器:可以感受到环境刺激,产生一定的兴奋。
主要包括内部感受器、外部感受器和本体感受器。
动态平衡的原理与训练方法动态平衡是指人体在运动中保持平衡的能力。
这是一种非常重要的生理功能,对于人体的健康和运动表现都具有不可忽视的影响。
在运动中,我们需要保持身体的稳定性,防止过度摇晃或不稳定的状态,以保持良好的姿势和动作。
因此,学习动态平衡是非常重要的,对人们的健康和运动能力都有着显著的帮助。
在本文中,我们将探讨动态平衡的原理与训练方法。
一、动态平衡的原理动态平衡是由人体各部位的内部系统协同作用形成的。
其中最主要的是三个系统:视觉系统、前庭系统和本体感觉系统。
这三个系统相互配合,协同工作,以确保身体稳定性和动作的流畅性。
1. 视觉系统视觉系统是指我们的眼睛。
通过眼睛的视觉反馈,我们能够了解自己所处的环境及自身的位置和动态变化。
例如,在进行跳跃动作时,我们需要观察落点以确保自己的方向和高度,并在空中对自己的位置和动作进行控制。
2. 前庭系统前庭系统位于耳朵中,是人体维持平衡的一个极为重要的系统。
它能够感知人体的位置和方向,并对身体的动态变化做出反应。
例如,当人体经历旋转、移动或转弯时,前庭系统会向大脑发送相关的信号,使其进行调节以保持身体的平衡。
3. 本体感觉系统本体感觉系统是指身体各部位的感觉器官,如肌肉、关节和韧带。
它们能够感知自身的姿态、位置和运动状态,并向大脑发送信号以控制身体的姿态和运动。
例如,在进行蹲起动作时,我们需要倚靠前庭系统和本体感觉系统共同协调以保持平衡。
二、动态平衡的训练方法了解动态平衡的原理,我们可以进行相应的训练来提升自己的动态平衡能力。
以下是一些常见的动态平衡训练方法:1. 单脚站立训练单脚站立训练可以帮助我们提高平衡感,锻炼前庭系统和本体感觉系统的协同作用。
可以将双手插入腰间,将一个脚抬高,使脚跟离地,然后用另一条腿保持平衡。
初始时可以尝试站立10秒钟,然后慢慢增加时间。
2. 平板支撑训练平板支撑训练可以锻炼腹肌、臀部和核心肌肉,以支持身体的稳定。
可以采用标准的平板支撑姿势,将身体伸直,保持身体姿态平稳。
工业机器人本体的基本结构和功能下载温馨提示:该文档是我店铺精心编制而成,希望大家下载以后,能够帮助大家解决实际的问题。
文档下载后可定制随意修改,请根据实际需要进行相应的调整和使用,谢谢!并且,本店铺为大家提供各种各样类型的实用资料,如教育随笔、日记赏析、句子摘抄、古诗大全、经典美文、话题作文、工作总结、词语解析、文案摘录、其他资料等等,如想了解不同资料格式和写法,敬请关注!Download tips: This document is carefully compiled by theeditor.I hope that after you download them,they can help yousolve practical problems. The document can be customized andmodified after downloading,please adjust and use it according toactual needs, thank you!In addition, our shop provides you with various types ofpractical materials,such as educational essays, diaryappreciation,sentence excerpts,ancient poems,classic articles,topic composition,work summary,word parsing,copy excerpts,other materials and so on,want to know different data formats andwriting methods,please pay attention!工业机器人本体:基本结构与功能解析在现代制造业中,工业机器人已经成为不可或缺的自动化设备。
高炉本体系统危险有害因素分析(喷煤系统)高炉本体系统危险有害因素分析(喷煤系统)高炉喷煤系统是高炉本体系统的重要组成部分,其主要功能是将煤粉喷入高炉内,为高炉提供燃料和还原剂。
本文将从湿度、噪音和有害气体等方面对高炉喷煤系统存在的危险有害因素进行分析。
一、湿度1.湿度对设备的影响:高炉喷煤系统中的设备,如喷枪、输送管道等,在潮湿的环境中容易生锈、腐蚀,导致设备损坏,影响高炉的正常运行。
2.湿度对人员的影响:高炉喷煤系统在喷吹过程中会产生大量的水蒸气和粉尘,湿度过高可能导致操作人员呼吸困难、引发职业病等。
措施和建议:1.加强设备维护和保养,定期检查设备的锈蚀情况,及时采取防锈措施。
2.在操作室内安装除湿设备,保持适宜的湿度环境。
3.为操作人员提供相应的防护用品,如防尘口罩、防护眼镜等。
二、噪音1.噪音对人员健康的影响:高炉喷煤系统运行过程中产生的噪音较大,长期接触可能导致听力下降、头晕、失眠等健康问题。
2.噪音对工作的影响:噪音过大可能会干扰操作人员的注意力,导致操作失误或不当,从而引发事故。
措施和建议:1.采用低噪音设备,降低系统运行噪音。
2.对产生噪音较大的区域进行隔音处理,如安装隔音板、隔音罩等。
3.为操作人员提供耳塞等个人防护用品。
三、有害气体1.有害气体对人员健康的影响:高炉喷煤系统中产生的有害气体主要包括一氧化碳、二氧化硫、氮氧化物等,长期接触这些气体可能导致职业病,如中毒、呼吸道疾病等。
2.有害气体对工作的影响:有害气体会影响操作人员的视线和判断力,导致操作不当或失误,从而引发事故。
措施和建议:1.在操作室内安装气体检测仪,实时监测有害气体的浓度。
2.为操作人员提供呼吸防护用品,如空气呼吸器、防毒面具等。
3.对有害气体的排放进行处理和净化,以减少对环境和人员的影响。
4.加强操作人员的安全培训和教育,提高其对有害气体的认知和处理能力。
5.定期对高炉喷煤系统进行检修和维护,确保设备正常运行,减少有害气体的产生和排放。