永磁同步电动机电磁场计算中定转子空间相对位置确定的研究
- 格式:pdf
- 大小:271.57 KB
- 文档页数:5
永磁同步电动机转子位置辨识摘要永磁同步电动机(Permanent magnet synchronous Machine, PMSM)由于无需励磁电流、体积轻便、运行效率很高,在工业领域得到越来越广泛的应用。
只有知道了精确的转子位置信息,才能实现永磁同步电动机转子磁场定向的运动控制。
在传统的永磁同步电动机运动控制系统中,通常采用光电编码器或旋转变压器来检测转子的位置。
然而,这些传感器增加了系统的成本,并且降低了系统的可靠性。
因此,无传感器检测永磁同步电动机转子位置已逐渐成为热点。
本文阐述了永磁同步电动机的发展历程、永磁材料的发展,以及它的结构、工作原理和特点等。
介绍了永磁同步电动机转子位置检测的常用方法分两种:即直接方式检测和间接方式检测。
直接方式可分为:旋转变压器法、磁编码器法、光电编码器法;间接方式可分为:电感法、磁链法、假想坐标系法、基于各种观测器的估算方法、卡尔曼滤波器法、高频注入法和人工智能理论基础上的估算方法。
针对本课题主要做了以下研究工作:在构建其数学模型的基础上,深入分析电机定子电感的饱和效应,得出旋转高频电压注入法能够准确跟踪转子凸极位置,但其存在不能确定估算结果是N极还是S极位置的问题。
对于这个问题,本文又分析了永磁同步电机定子电流对电机磁路饱和度的影响,根据旋转电流矢量幅值变化特性,提出了一种判定转子永磁体N/S极极性的方法,解决了常规高频注入法所存在的估算结果可能反向的问题。
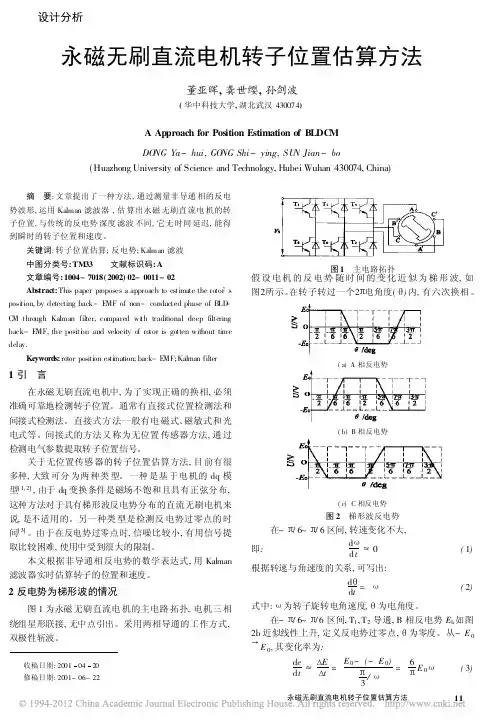
关键词:永磁同步电动机;高频电压注入;转子位置检测ABSTRACTAs the permanent magnet synchronous motor without excitation current, volume light, high efficiency, more and more widely in the industrial fieldsof application. Only know the exact rotor position information, to achieve permanent magnet synchronous motor rotor flux orientation motion control. In a traditional permanent magnet synchronous motor motion control system, usually optical encoder or resolver to detect the rotor position. However, these sensors increase the system cost and reduced reliability of the system.Therefore, sensorless permanent magnet synchronous motor rotor position detection has gradually become a hot spot.This paper describes the development process of permanent magnet synchronous motor, permanent magnet materials development, and its structure, working principle and characteristics. Introduced a permanent magnet synchronous motor rotor position detection of the common methods in two ways: the direct detection and indirect detection methods. Direct methods can be divided into: rotating transformer, magnetic encoder method, optical encoder method; indirectly, can be divided into: inductance method, flux method, imaginary coordinate system method, the various observer-based estimation method, Kalman filtering device method, high frequency injection method and Artificial Intelligence based on the theory of estimation methods.The main topics for research work to do the following: In building a mathematical model based on in-depth analysis of the saturation effect of the stator inductance, obtained rotating high frequency signal injection method to accurately track the position of the rotor salient, but its existence can not be determined or estimated results is N pole S pole position of the problem. For this problem, this paper analyzed the current permanent magnet synchronous motor stator magnetic circuit saturation, according to the amplitudevariations of current vector rotation, a permanent magnet rotor determine N / S pole polar solutions to Injection of conventional high-frequency estimation results are likely to reverse the existing problems.Keywords:Permanent magnet synchronous motor, High frequency signal injection, Rotor position detection目录第一章绪论 (1)1.1课题的研究背景 .......................................................1 1.2 永磁同步电动机的国内外研究现状 (2)1.3永磁材料的发展 ....................................................... 4 第二章永磁同步电动机的结构及特点. (4)2.1永磁同步电动机的总体结构 (4)2.1.1 定子结构 (5)2.1.2 转子结构 ....................................................... 6 2.1.3 永磁同步电动机的转子磁极结构型式 ............................... 6 2.2永磁同步电机的特点 .................................................. 10 第三章永磁同步电动机的工作原理及数学模型. (11)3.1永磁同步电动机的工作原理 ............................................ 11 3.2 坐标变换原理 . (12)3.3永磁同步电动机的数学模型 (13)3.4磁路结构对数学模型中参数的影响 ...................................... 15 第四章永磁同步电动机转子位置检测的方法 (17)4.1直接方式 ............................................................ 17 4.2间接方式 (18)第五章旋转高频注入法的原理及应用 (22)5.1旋转高频信号激励下永磁同步电机数学模型 .............................. 22 5.2旋转高频电压信号注入法原理 (23)5.3永磁同步电机转子初始位置检测 (27)5.3.1基于旋转高频注入法的转子初始位置检测原理 (28)5.3.2面贴式永磁同步电机定子电感饱和效应分析研究 .................... 29 5.3.3根据高频电流响应幅值判定N、S极 . (31)第六章结论 ................................................................ 32 参考文献 ................................................................... 34 翻译部分 . (36)英文原文 ............................................................... 36 中文译文 (45)致谢 (54)中国矿业大学2021届本科生毕业设计第1页第一章绪论1.1课题的研究背景直流电气传动和交流电气传动在19世纪中期先后诞生,由于直流电气传动具有良好的调速性能和转矩控制性能,改变决定交流调速的电源频率的改变和对电动机转矩控制极为困难,因此,在20世纪相当长的一段时间内直流传动成为电气传动的主流。
基于卡尔曼滤波的永磁同步电机转子位置估算方法研究摘要:针对永磁同步电机(Permanent Magnet Synchronous Motor PMSM)矢量控制(FOC )系统中应用低分辨率霍尔(Hall )位置传感器估算转子位置的方法中存在的噪声干扰问题,提出利用卡尔曼滤波在平均加速度估算方法中对信号所夹杂的噪声进行滤除的方案。
在Matlab中搭建改进的仿真模型进行仿真,与原有方案进行对比,结果显示进行滤波处理后的位置估算结果更加精确,效果明显。
关键词:永磁同步电机;Hall 传感器;卡尔曼滤波;矢量控制中图分类号:TM351文献标识码:A 文章编号:2095-0438(2019)09-0143-05(1.安徽工程大学电气工程学院安徽芜湖241000;2.中国质量认证中心南京分中心江苏南京210019)李长明1王传奎2魏利胜1陆华才1近年来,由于稀土元素的广泛应用,永磁材料不断更新,以钕铁硼(NdFeB )材料加工而成的永磁体展现出很高的性能,这使得永磁类电机得到了迅速的发展,其中最为突出的是运行相对更为可靠、效率更高、体积更小的永磁同步电机(PMSM )。
而且,永磁同步电机能够在数字控制系统中实现更高性能的速度和位置控制,这得益于矢量控制和空间矢量脉宽调制这些先进方法的应用。
目前,PMSM 广泛应用于新能源汽车、加工制造业和冶金等领域,并且具有很好的发展前景[1]。
为了使整个PMSM 控制系统稳定运行,需要实时调节转子的速度和位置,一般的方法是在电机转子的轴上安装位置传感器,其作用是实现转子转速和位置的闭环控制。
利用光电转换原理的光电编码器和能够将位移转换为电信号的旋转变压器是比较常用的位置传感器,它们具有相对较高的测量精度,但与此同时这些传感器的成本相对较高,硬件电路复杂,具有大量的接口和电缆,这使得它在实际应用时存在着的很多难以避免的问题[2]。
在过去40多年的时间里,很多国内外的研究学者为了解决这些问题做了大量的研究,提出了多种无位置/速度传感器控制方法应用于交流电机。
永磁同步电机位置估计技术研究永磁同步电机是一种高效、节能的电机,已被广泛应用于工业生产和交通运输等领域。
然而,在永磁同步电机控制中,位置估计技术是关键问题之一。
因此,本文将探究永磁同步电机位置估计技术的研究现状及发展趋势。
一、永磁同步电机位置估计技术研究现状永磁同步电机位置估计技术研究主要分为两大流派:传统方法和先进方法。
传统方法包括反电动势法、编码器法、霍尔元件法等。
反电动势法是一种基于电机自感应原理的位置估计方法,可以通过对磁场变化的监测来确定转子位置。
编码器法则是一种机械式位置传感器,将磁场信息转换为数字信号,可以实时输出电机位置信息。
霍尔元件法则是基于霍尔元件的位置传感器,可以实现电机位置的实时监测。
虽然传统方法已经得到了广泛应用,但是存在一些问题,例如跨越和精度。
在永磁同步电机驱动中,反电动势的跨越指一个位置估计器不能正确地识别电机的转子位置。
编码器的精度主要受到其输出分辨率的限制。
而霍尔元件法需要大量的硬件和复杂的算法,计算量大,响应速度也比较慢。
为了解决这些问题,先进的位置估计技术应运而生。
二、永磁同步电机位置估计技术研究发展趋势先进的永磁同步电机位置估计技术主要包括基于观测器、卡尔曼滤波器、模型预测控制等方法。
基于观测器的位置估计方法主要是基于卡尔曼滤波器设计的滑模观测器。
该方法通过对电机模型的观测和补偿,可以实现对电机位置的估计。
而卡尔曼滤波器则是一种利用状态量模型表示系统状态的滤波器,可以通过卡尔曼滤波算法,对测量值进行先验知识和精度的考虑,从而减少传感器误差对状态估计的影响。
模型预测控制法是一种通过状态估计来预测电机位置的方法。
其基本思想是利用电机的动态模型对电机位置进行预测,然后通过不断地调整电机状态,来实现对电机位置的估计。
最后,将各种方法进行综合,进行融合算法,如基于模糊算法和神经网络的位置估计方法。
三、结论进一步研究和发展永磁同步电机位置估计技术,对于提高电机性能和实现电机高效、智能化控制具有十分重要的意义。
内置式永磁同步电机转子初始位置估计方法1 简介内置式永磁同步电机作为一种高效的电机,广泛应用于各个领域中。
然而,在实际运行过程中,确定初始位置成为影响电机性能的重要因素。
在本文中,我们将会介绍内置式永磁同步电机转子初始位置估计方法,以帮助读者更好地理解这一技术。
2 内置式永磁同步电机初始位置问题内置式永磁同步电机的工作原理是基于永磁体和电枢之间的相互作用。
由于永磁体和电枢之间的初始相位差会影响电机的性能,所以准确地确定初始位置很重要。
在传统的控制方法中,通常使用编码器来确定初始位置。
但是,编码器受到机械误差和精度限制的影响,所以对于高精度控制要求的应用,编码器显然无法满足需求。
3 内置式永磁同步电机初始位置估计方法由于编码器限制,人们开始研究替代方案。
目前,有两种方法用于确定内置式永磁同步电机的初始位置,即基于电动势(EMF)测量的方法和基于扩展卡尔曼滤波(EKF)的方法。
在EMF方法中,通过测量电动势来确定转子位置,这种方法无需安装编码器,可以减少成本和增加可靠性。
但是,EMF测量会受到电流和电压变化的影响,在低速和低负载运行情况下,精度会受到很大挑战。
相对而言,EKF算法通过估计状态向量的协方差矩阵,能够准确地估计位置,提供了较高的控制精度。
同时,这种方法增加了计算量,需要合理的硬件支持。
4 总结总体而言,内置式永磁同步电机转子初始位置估计方法是一个十分重要的研究领域。
EMF和EKF是两种主要的方法,各有优缺点。
因此,在实际应用中,应该结合具体的应用场景和技术需求,综合考虑选取合适的方法。
未来,随着相关技术和硬件的不断发展,更加高效和精确的方法将不断出现,让我们拭目以待。
永磁同步电机无传感器转子位置估算研究的开题报告1. 研究背景永磁同步电机是一种高性能、高效率的电机,广泛应用于工业、交通、家电等领域。
传统的永磁同步电机需要使用传感器反馈转子位置,但传感器的成本和维护成本较高,同时也增加了系统复杂度和故障率。
因此,研究永磁同步电机无传感器转子位置估算算法具有很高的实际应用价值。
本课题旨在从理论和实践两个方面探讨该算法的研究问题。
2. 研究内容2.1 研究永磁同步电机电磁特性通过对永磁同步电机的电磁特性进行分析,包括磁通方程、磁场分布等方面进行研究,建立电机一般数学模型。
2.2 研究永磁同步电机无传感器转子位置估算原理基于电机磁通方程,引入转子位置估算算法,建立永磁同步电机无传感器转子位置估算模型,并对其进行分析和优化。
2.3 研究永磁同步电机无传感器转子位置估算方法实现选取合适的估算方法,通过编程实现永磁同步电机无传感器转子位置估算方法。
在MATLAB中进行仿真,验证所提方法的正确性和优越性。
3. 研究意义本研究针对永磁同步电机无传感器转子位置估算的问题,提出了一种基于电机磁通方程的算法。
该算法具有应用成本低、稳定性高、故障率低等优点,可以为该领域的应用提供新的技术支持。
4. 预期成果本项目的预期成果包括:(1)建立永磁同步电机无传感器转子位置估算模型;(2)研究永磁同步电机无传感器转子位置估算方法并进行仿真验证;(3)分析所提出方法的优缺点及应用前景。
5. 研究方法本项目采用文献研究与仿真相结合的方法,通过查阅文献了解永磁同步电机的电磁特性及转子位置估算方法,同时在MATLAB中进行仿真验证。
6. 研究进度安排阶段一:文献阅读与研究阶段二:建立永磁同步电机大致数学模型阶段三:研究永磁同步电机无传感器转子位置估算原理阶段四:研究永磁同步电机无传感器转子位置估算方法实现阶段五:数据分析与结果论述,论文撰写7. 期望目标完成该研究后,期望达到以下目标:(1)理论上建立永磁同步电机无传感器转子位置估算模型,(2)实现永磁同步电机无传感器转子位置估算算法,并在MATLAB 中进行仿真验证,(3)分析所提方法的优缺点及应用前景,为行业应用提供技术支持。