形位公差通用解释
- 格式:pdf
- 大小:277.46 KB
- 文档页数:21
(1)形状公差:构成零件的几何特征的点,线,面要素之间的实际形状相对与理想形状的允许变动量。
给出形状公差要求的要素称为被测要素。
(2)位置公差:零件上的点,线,面要素的实际位置相对与理想位置的允变动量。
用来确定被测要素位置的要素称为基准要素。
形位公差的研究对象是零件的几何要素,它是构成零件几何特征的点,线,面的统称.其分类及含义如下:(1) 理想要素和实际要素具有几何学意义的要素称为理想要素.零件上实际存在的要素称为实际要素,通常都以测得要素代替实际要素.(2) 被测要素和基准要素在零件设计图样上给出了形状或(和)位置公差的要素称为被测要素.用来确定被测要素的方向或(和)位置的要素,称为基准要素.(3) 单一要素和关联要素给出了形状公差的要素称为单一要素.给出了位置公差的要素称为关联要素.(4) 轮廓要素和中心要素由一个或几个表面形成的要素,称为轮廓要素.对称轮廓要素的中心点,中心线,中心面或回转表面的轴线,称为中心要素形状公差有直线度,平面度,圆度和圆柱度.其含义和标注如下:1) 直线度2) 平面度平面度公差带只有一种,即由两个平行平面组成的区域,该区域的宽度即为要求的公差值.3) 圆度在圆度公差的标注中,箭头方向应垂直于轴线或指向圆心.4) 圆柱度形位公差的标注应注意以下问题:(1) 形位公差内容用框格表示,框格内容自左向右第一格总是形位公差项目符号,第二格为公差数值,第三格以后为基准,即使指引线从框格右端引出也是这样.(2) 被测要素为中心要素时,箭头必须和有关的尺寸线对齐.只有当被测要素为单段的轴线或各要素的公共轴线,公共中心平面时,箭头可直接指在轴线或中心线,这样标注很简便,但一定要注意该公共轴线中没有包含非被测要素的轴段在内.(3) 被测要素为轮廓要素时,箭头指向一般均垂直于该要素.但对圆度公差,箭头方向必须垂直于轴线.(4) 当公差带为圆或圆柱体时,在公差数值前需加注符号"Φ",其公差值为圆或圆柱体的直径.这种情况在被测要素为轴线时才有.同轴度的公差带总是一圆柱体,所以公差值前总是加上符号"Φ";轴线对平面的垂直度,轴线的位置度一般也是采用圆柱体公差带,需在公差值前也加上符号"Φ".(5) 对一些附加要求,常在公差数值后加注相应的符号,如(+)符号说明被测要素只许呈腰鼓形外凸,(-)说明被测要素只许呈鞍形内凹,(>)说明误差只许按符号的小端方向逐渐减小.如形位公差要求遵守最大实体要求时,则需加符号○M.在框格的上,下方可用文字作附加的说明.如对被测要素数量的说明,应写在公差框格的上方;属于解释性说明(包括对测量方法的要求)应写在公差框格的下方.例如:在离轴端300mm处;在a,b范围内等.形位公差是为了满足产品功能要求而对工件要素在形状和位置方面所提出的几何精度要求。
机械形位公差的中文说明1. 简介机械形位公差是机械制造过程中用来描述工件间相对位置关系的一种测量方法。
形位公差可以用于判断工件接合、定位和运动的精度。
本文将介绍机械形位公差的相关概念、符号以及常见的测量方法。
2. 机械形位公差的概念机械形位公差是指在机械制造中,用于描述工件之间位置关系的数值。
形位公差可以用于判断工件之间的相对位置是否满足设计要求。
形位公差可以分为位置公差、方向公差和角度公差三类。
2.1 位置公差位置公差描述了一个工件的位置相对于一个基准工件或基准字面位置的偏差。
位置公差通常用平行公差和垂直公差表示。
平行公差:用于描述两个平面或直线之间的平行关系。
平行公差由两个数值表示,其中一个数值表示两个平面或直线之间的距离,另一个数值表示平行关系的限制。
垂直公差:用于描述两个平面或直线之间的垂直关系。
垂直公差由两个数值表示,其中一个数值表示两个平面或直线之间的距离,另一个数值表示垂直关系的限制。
2.2 方向公差方向公差用于描述工件上的方向关系。
方向公差由两个角度值表示,其中一个角度值表示两个方向之间的夹角,另一个角度值表示方向关系的限制。
2.3 角度公差角度公差用于描述工件上的角度关系。
角度公差可以用于判断两个角度之间的差异是否在允许范围内。
3. 形位公差的符号形位公差通常用符号表示,下面列举了一些常见的形位公差符号:•位置公差:–平行公差:⊥–垂直公差:||•方向公差:∠•角度公差:θ4. 测量方法测量机械形位公差可以使用多种测量设备和方法。
以下是常见的机械形位公差测量方法:•坐标测量法:使用数控测量仪、三坐标测量仪等精密测量设备,通过测量工件在坐标系中的坐标值来计算形位偏差。
•投影测量法:使用光学投影仪或投影测量仪,将工件的投影投射到测量屏幕上,通过测量屏幕上的投影图案来判断形位偏差。
•对比测量法:使用对比板或对比尺等测量工具与待测工件进行对比测量,通过对比测量值与标准值的差异来判断形位偏差。
[精华]形位公差定义形状位置公差零件在加工过程中,由于机床,夹具,刀具系统存在几何误差,以及加工中出现受力变形、热变形、振动和磨损等影响,使被加工零件的几何要素不可避免地产生误差。
这些误差包括尺寸偏差、形状误差(包括宏观几何误差、波度和表面粗糙度)及位置误差。
1.形状公差形状公差是指单一实际要素的形状所允许的变动全量。
形状公差用形状公差带表达。
形状公差带包括公差带形状、方向、位置和大小等四要素。
形状公差项目有:直线度、平面度、圆度、圆柱度、线轮廓度、面轮廓度等6 项。
2.位置公差位置公差是指关联实际要素的位置对基准所允许的变动全量。
2.1.定向公差定向公差是指关联实际要素对基准在方向上允许的变动全量。
这类公差包括平行度、垂直度、倾斜度3项。
2.2.定位公差定位公差是关联实际要素对基准在位置上允许的变动全量。
这类公差包括同轴度、对称度、位置度3项。
2.3.跳动公差跳动公差是以特定的检测方式为依据而给定的公差项目。
跳动公差可分为圆跳动与全跳动。
零件的形位公差共14项,其中形状公差6个,位置公差8个,列于下表。
分类项目符号简要描述直线度是表示零件上的直线要素实际形状保持理想直线的状况。
也就是通常所说的平直程度。
直线度直线度公差是实际线对理想直线所允许的最大变动量。
也就是在图样上所给定的,用以限制实际线加工误差所允许的变动范围。
平面度是表示零件的平面要素实际形状,保持理想平面的状况。
也就是通常所说的平整程度。
平面度平面度公差是实际表面对平面所允许的最大变动量。
也就是在图样上给定的,用以限制实际表面加工误差所允许的变动范围。
圆度是表示零件上圆的要素实际形状,与其中心保持等距的情况。
即通常所说的圆整程度。
圆度圆度公差是在同一截面上,实际圆对理想圆所允许的最大变动量。
也就是形状图样上给定的,用以限制实际圆的加工误差所允许的变动范围。
公差圆柱度是表示零件上圆柱面外形轮廓上的各点,对其轴线保持等距状况。
圆柱度公差是实际圆柱面对理想圆柱面所允许的最大变动量。
![形位公差通用解释[1]](https://uimg.taocdn.com/d55444d676eeaeaad1f330ab.webp)
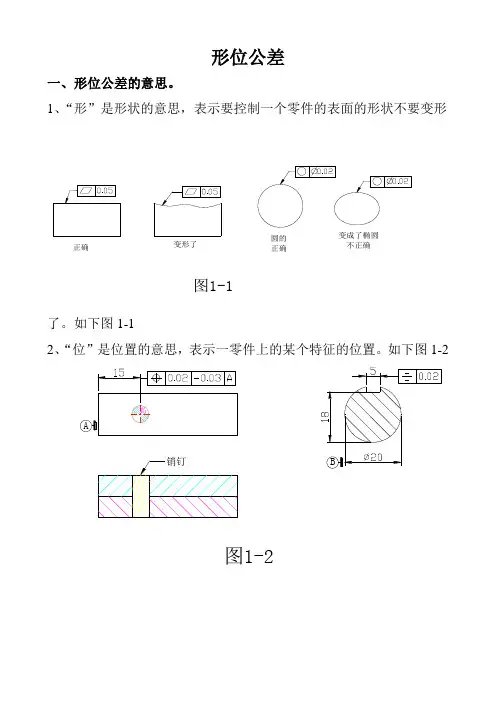
形位公差一、形位公差的意思。
1、“形”是形状的意思,表示要控制一个零件的表面的形状不要变形了。
如下图1-12、“位”是位置的意思,表示一零件上的某个特征的位置。
如下图1-2图1-2正确变形了变成了椭圆不正确圆的正确图1-1二、形位公差符号/名称三、符号表示的公差形四、各符号的解说1. 位置度表示某特征的位置要求较高就可以用这个位置度来控制。
如下图2-1图2-12、同轴度表示轴类或孔来说,要求它们是在同一线上的。
如下图2-2图2-2如果位置不对了,那上板和下板说对不上了!对称度表示以一线或面为基准,要求两边以它对称。
如下图2-3图2-34、平行度表示一平面或线与另一平面或线平行。
如下图2-4图2-4表示某一平面或线与另一平面或线垂直。
如下图2-5图2-56、角度度表示一平面或线与另一平面或线形成的角度之间的公差。
如下图2-6图2-67、圆柱度表示一圆柱形零件的圆柱面要是直的,也就是不能有锥度。
如下图2-7图2-78、平面度表示一个面是平整的,不可以凹凸不平。
如下图2-8图2-89、圆度表示一个圆形的零件的形状的圆度要够圆,不要变形成为的椭圆了如下图2-9轴孔图2-910、直线度表示一线或边是直的,不要变弯了。
如下图2-10图2-1011、线轮廓表示两等线之间的距离相等,也就是说两条曲线是一样了。
如下图2-11图2-1112、面轮廓表示两曲面之间的距离是相等的。
如下图2-12图2-1213、圆跳动表示一圆柱形的零件在做圆周运动时的跳动量。
如图2-13图2-1314、全跳动表示一圆柱类零件在做轴向各和径向运动的时的跳动量。
图2-1415、投影公差投影公差是一条边或线投影到另一面上所得到的一条虚拟线再以所要控制的边或线之间的误差值。
如下图2-15图2-15本资料完成于2010年8月5日晚!以上资料希望对大家有用如有不明白或做的不好的地方请与我联系!QQ289975878 谢谢!说明一下,以上资料只是以本人所学做出来的如有不对本人不负责!!罗运良。
产品计量专业术语表 / WebCode 8718专业术语表A Angularity 倾斜度Angular sector roundness 区域圆度B Base roughness depth 基本粗糙度深度C Core roughness 中心粗糙度Coaxiality 同轴度Concentricity 同心度Conicity 锥度Cutoff 截至波长Cylindricity 圆柱度F Flatness 平面度G General notes on form and location tolerances 形位公差通用解释M Material ratio 材料支撑率Mean roughness 平均粗糙度P Parallelism 平行度Peak count 轮廓峰数量Peak height 轮廓峰高度Perpendicularity 垂直度Profile any line 线轮廓度Profile any surface 面轮廓度Position 位置度Profil depth 轮廓深度Profil filter 轮廓滤波R Roughness profile 粗糙度轮廓Roughness depth 粗糙度深度Roundness 圆度Radial run-out 径向跳动S Skewness 偏斜度Symmetry 对称度Straightness 直线度T Traversing length 扫描长度Total run-out 全跳动W Waviness height 波纹度高度形位公差的通用解释某个特性(表面、轴、点和中平面等)的形位公差是定义为一个区域,这个特性的所有点都包含在这个区域内。
依照该特性的给定公差和它的维数特征,其公差区域是下面中的一个:圆内区域两同心圆之间的区域 两平行直线间的区域 两等距线之间的区域 两平行平面间的区域 两等距面间的区域 圆柱内区域两同轴圆柱之间的区域 平行六面体你的区域对于位置公差,必须定义一个基准用于决定公差区域的准确位置。
基准是一个理论上确切的几何特性(象轴、平面、直线等),基准可以基于一个或者几个基准特性。
除非有更加严格的限制,公差特性可以是公差区域内的任意的形状、位置和方向等。
公差的数值 t 用于线性测量时以相同的单位给出。
如果没有特殊的说明,公差作用于被标注公差特性的整个范围。
平面度 ISO 1101 (1985-03)形位公差的通用解释定义公差被限制在间隔为t 的两个平行平面区域之间实例标注公差的表面限制在间隔为0.08mm 的两个平行平面区域之间面轮廓度 ISO 1101 (1985-03)形位公差的通用解释定义公差区域为两个表面之间,其间隔为被包罗的球的直径t,所有球心组成具有理论几何形状的表面。
实例相应的表面被包含在两个表面之间,此两表面包罗的最大球的直径0.02mm,所有球心组成具有理论几何形状的表面。
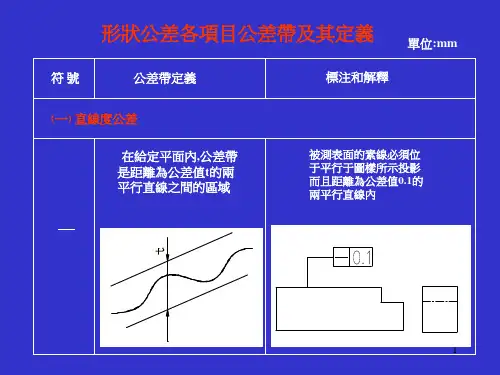
直线度 ISO 1101 (1985-03)形位公差的通用解释定义公差区域为测量平面上间隔为t的两平行直线间的范围。
实例被标注公差的圆柱表面上,任意的母线应被包含在间隔是0.1mm的两平行直线之间。
被标注公差的圆柱表面上,任何母线在任意200mm范围内,应被包含在间隔是0.1mm的两平行直线之间。
注释进一步了解直线度公差,请参考 ISO 1101。
全跳动 ISO 1101 (1985-03)形位公差的通用解释端面全跳动定义公差区域是和基准轴垂直的距离为t的两个平行平面之间的范围举例(端□/轴忑跳动)被标注公差的表面,应包含在和基准轴D垂直的距离为0.1的两个平行平面之间的范围注释当执行测量时,工件必须绕基准轴旋转若干周,工件和测量仪器之间必须有径向的移动。
径向全跳动,请参考ISO 1101。
轮廓峰高 DIN EN ISO 4287, ASME B46.1定义Rp 一个取样长度内,粗糙度轮廓上最高的轮廓峰的高度。
参照ASME,Rp的平均值(整个评定长度上进行平均运算)叫做Rpm Rv 一个取样长度内,粗糙度轮廓上最低的轮廓谷的深度。
迄今为止,Rm 经常用来代替Rv。
Rp + Rv 它们的和被叫做单轮廓的深度 Rzi.基本粗糙度深度 Daimler Benz Standard N 31007 (1983)定义单粗糙度深度 R3zi 是粗糙度轮廓上一个取样长度lr内第三高的轮廓峰和第三高的轮廓谷之间的垂直距离。
基本粗糙度深度 R3z 是5个连续取样长度上单粗糙度深度R3zi的平均值。
轮廓峰和轮廓谷一定超过某个竖直和水平的最小值。
中心粗糙度 DIN EN ISO 13565-1 und -2定义参照ISO 13565-1粗糙度轮廓由特殊的滤波技术而生成的,对于象高原上的深谷这样要有极小的轮廓变形。
一条直线把材料支撑率曲线(Abbott-Firestone 曲线)分成三部分,由此参照ISO 13565-2定义如下各参数: 中心粗糙度深度 Rk 是粗糙度中心轮廓的深度。
消减的轮廓峰高 Rpk 粗糙度中心轮廓突出峰值的平均高度 消减的轮廓谷深 Rvk 粗糙度中心轮廓突出谷值的平均深度Mr1 和 Mr2 粗糙度中心轮廓的最小材料支撑率和最大材料支撑率锥度(标准中没有的参数)形位公差的通用解释定义公差区域为测量平面上平行于参考基准的间隔为t 的两直线间的范围。
作用的不是测量轮廓,而是严格对应于测量长度经由最小二乘法运算的参考直线部分应包含公差范围内。
实例依照LSS 计算的参考直线的各个区域,即标注公差的被测量区域的圆柱表面应包含在平行于对面母线的间隔0.04mm 的两平行直线之间。
注释平行度便差可能更大些,如果有必要,可以分别规定公差。
同心度、同轴度 ISO 1101 (1985-03)形位公差的通用解释同轴度定义公差区域是直径t 为的圆柱体范围内,圆柱体的轴线和参考轴线一致举例 (同轴度)被标注公差的圆柱的轴线应该被包含在以基准轴A 为轴线,直径0.08 的圆柱内。
注释同心度公差,参见ISO 1101线轮廓度 ISO 1101 (1985-03)形位公差的通用解释定义公差区域为某两条特定曲线之间的范围,这两条曲线为直径为t 的圆的包罗线,圆的圆心轨迹和理论的几何形状相一致。
实例在平行于投影平面的每个部分,标注了公差的轮廓将包含在两条曲线之间,这两条曲线包罗直径为0.04的圆,其圆心轨迹和理论的几何形状相一致。
材料支撑率DIN EN ISO 4287, ASME B46.1定义材料支撑率 Rmr(ASME叫做tp)是以百分数表达的比率,在轮廓截止线上(截止水平C)的充满材料的长度之和于总评定长度的比率。
轮廓的截止水平C是被评定的截止线和某特定的参考线Cref之间的距离。
材料率曲线(Abbott-Firestone曲线)标示的是材料率Rmr是轮廓截止水平C的函数,材料率同样也可以在P轮廓或W轮廓上评定,叫做Pmr 和 Wmr。
平均粗糙度 DIN EN ISO 4287, ASME B46.1定义平均粗糙度Ra是粗糙度轮廓高度的绝对值的算术平均值。
均方根(RMS)粗糙度Rq是粗糙度轮廓高度的几何平均值。
Z(x)-----粗糙度轮廓的轮廓高度Ra 也称为AA 和CLA,Rq 也称为RMS.倾斜度 ISO 1101 (1985-03)形位公差的通用解释定义公差区域是距离为t 的两个特定平行平面之间的范围,这两个平面相对某参考面倾斜特定的角度。
举例标注公差的表面应包含在距离0.05的两平行平面之间,这两个平面对基准轴线A 倾斜12°。
平行度 ISO 1101 (1985-03)形位公差的通用解释定义公差区域是在测量平面上距离为t 的和基准相平行的两直线间的范围。
举例标注公差的表面上的任何母线应包含于间隔为0.1的平行于基准面A 的两条直线间的范围内。
注释更多的关于平行度公差的信息,参看ISO 1101位置度 ISO 1101 (1985-03)形位公差的通用解释定义如果公差值前面缀以符号Æ表示,那么,公差区域为直径t 的圆柱内部,它的轴线就是理论上的确切位置。
举例被标以位置度的孔的轴线应包含于直径0.02圆柱内部,圆柱的轴线就是相对于表面A和表面B的理论上的确切位置。
注释对一个点或者面的位置度,参看ISO 1101轮廓滤波 DIN EN ISO 11562, ASME B46.1定义轮廓滤波把轮廓分成长波分量和短波分量,lc滤波把粗糙度轮廓从长波轮廓(如波纹度轮廓)中分离出来。
中线是通过相位修正滤波和轮廓上所有点的重心平均值计算得到的。
加权函数指示了轮廓上的每一点的评估系数,用此系数相邻的轮廓点进行平均运算。
R-轮廓(粗糙度轮廓)代表中线的初级轮廓经过lc轮廓滤波之后的偏差,当呈现为粗糙度轮廓时,中线就是零线。
扫描长度lt当捕获跟踪轮廓时,测针经过的总长度。
它是预行程、评定长度ln、过行程的总和。
截止波长lc是用来决定多大波长属于粗糙度轮廓和多大波长属于波度轮廓。
取样长度lr是粗糙度评定的参考长度,等于截波长lc,取样长度lp和 lw,分别对应于P轮廓和W轮廓评定时的参考长度。
评定长度ln,是扫描扫描长度lt的一部分,由此得到表面参数的数值,标准的粗糙度长度由5个连续的取样长度组成。
轮廓深度 DIN EN ISO 4287定义轮廓深度Pt(P轮廓的总高度),是P轮廓上,在评定长度ln(参考长度)内,轮廓的最大峰高和最大谷深之和。
参考长度一定被标注出。
P-轮廓(初级轮廓)是由直接采样轮廓处理得到的。
...为了滤除名义形状轮廓,应用图纸上指示的模型的最小二乘法,例如,线性轮廓的回归线。
...为了滤除超短波,使用ls滤波,这样一定程度上增加了可比性(DIN EN ISO 3274)。
粗糙度深度 DIN EN ISO 4287, ASME B46.1定义单独粗糙度深度Rzi,是一个取样长度内,最高峰和最深谷之间的竖直距离。
平均粗糙度深度Rz,是连续多个取样长度上,单独粗糙度深度Rzi的算术平均值。
最大粗糙度深度Rmax ,是评定长度内最大的单独粗糙度深度。
Rz 的定义和DIN 4768:1990的定义相一致。
十点高度Rz 一样的参数,在ISO 4287:1984 中叫Ry ,已经被取消。
Rmax 也称为Rz1max 。
垂直度 ISO 1101 (1985-03)形位公差的通用解释定义公差区域是在测量平面上距离为t 的和基准相垂直的两直线间的范围。
举例标注公差的圆柱表面上的任何母线应包含于间隔为0.1的垂直于基准表面的两条直线间的范围内。
注释更多的关于垂直度公差的信息,参看ISO 1101。
圆度 ISO 1101 (1985-03)形位公差的通用解释定义公差区域为测量平面上和转轴垂直的间隔为t 的两个同心圆之间的范围。