电动葫芦的结构和原理
- 格式:ppt
- 大小:359.00 KB
- 文档页数:12
电动葫芦有钢丝绳电动葫芦和环链电动葫芦。
下面说说钢丝绳电动葫芦。
电动葫芦是一种起重和行走组合的起重设备,起重部分由三部分组成。
一端的锥形转子电动机,通过花键套和传动轴将动力传递到另一端的减速机,经过减速的动力,传递到中间的钢丝绳卷筒,由钢丝绳和吊钩进行起重作业,这种电动机有制动功能。
电动葫芦的主体,悬挂在行走小车上,小车在起重机大梁的工字钢下沿上行走进行就位作业。
小车构造简单,是一个较小的锥形转子电机,由小减速箱减速后带动行走轮行走。
环链电动葫芦构造相似,由链轮代替钢丝绳卷筒,由起重链条代替钢丝绳起重作业。
使用千斤顶时一定要事先阅读使用说明,而且要注意以下问题:1、使用前必须检查各部是否正常。
2、使用时应严格遵守主要参数中的规定,切忌超高超载,否则当起重高度或起重吨位超过规定时,油缸顶部会发生严重漏油。
3、如手动泵体的油量不足时,需先向泵中加入应为经充分过滤后的N32#液压油才能工作。
4、电动泵请参照电动泵使用说明书。
5、重物重心要选择适中,合理选择电动千斤顶的着力点,底面要垫平,同时要考虑到地面软硬条件,是否要衬垫坚韧的木材,放置是否平稳,以免负重下陷或倾斜。
6、电动千斤顶将重物顶升后,应及时用支撑物将重物支撑牢固,禁止将电动千斤顶作为支撑物使用。
如需长时间支撑重物请选用YZL自锁式千斤顶7、除应正确安放超高压千斤顶外,应使用多顶分流阀,且每台电动千斤顶的负荷应均衡,注意保持起升速度同步。
还必须考虑因重量不匀地面可能下陷的情况,防止被举重物产生倾斜而发生危险。
8、使用时先将手动泵的快速接头与顶对接,然后选好位置,将油泵上的放油螺钉旋紧,即可工作。
欲使活塞杆下降,将手动油泵手轮按逆时针方向微微旋松,油缸卸荷,活塞杆即逐渐下降。
否则下降速度过快将产生危险。
9、本LH液压千斤顶油压回缩,起重完后,即可快速取出,但不可用连接的软管来拉动LH液压千斤顶.10、用户使用时千万不要超过额定行程,以免损坏电动千斤顶。
电葫芦的原理
电葫芦是一种常见的起重设备,它利用电动机驱动齿轮来驱动
卷扬装置,从而实现货物的升降。
其原理主要包括电动机原理、传
动原理和卷扬装置原理。
首先,电葫芦的电动机原理是其工作的基础。
电葫芦通常采用
异步电动机或直流电动机作为驱动力源。
当电动机通电时,产生旋
转磁场,通过电磁感应原理使电动机产生转矩,从而驱动齿轮旋转。
这种电动机原理保证了电葫芦的正常工作。
其次,传动原理也是电葫芦能够实现货物升降的重要原理。
电
葫芦中的传动系统通常由齿轮、链条或皮带等组成,通过齿轮传动
或链条传动将电动机的动力传递到卷筒上,实现卷筒的旋转。
传动
原理保证了电葫芦能够有效地提升货物,实现起重作业。
最后,卷扬装置原理也是电葫芦实现货物升降的关键。
卷扬装
置通常由卷筒、钢丝绳等组成,通过卷筒的旋转来升降货物。
当电
动机驱动齿轮旋转时,通过传动系统将动力传递到卷筒,卷筒带动
钢丝绳升降货物。
卷扬装置原理保证了电葫芦能够稳定地提升货物,确保工作安全。
总的来说,电葫芦的原理主要包括电动机原理、传动原理和卷扬装置原理。
通过这些原理的相互作用,电葫芦能够实现货物的升降,广泛应用于工厂、仓库、码头等场所,为生产和物流提供了便利。
希望通过本文的介绍,读者能够对电葫芦的原理有更深入的了解。
电动葫芦的工作原理电动葫芦是一种常见的起重设备,广泛应用于工业、建筑、物流等领域。
它的工作原理是基于电动机的转动驱动齿轮传动装置,使吊钩上升或下降,实现物品的起升、下降、悬挂和移动等操作。
本文将详细介绍电动葫芦的工作原理及其组成部分。
一、电动葫芦的工作原理电动葫芦的工作原理是将电能转化为机械能,通过齿轮传动装置实现物品的起升和下降。
电动葫芦主要由电动机、减速器、齿轮传动装置、制动器、吊钩和控制系统等组成。
电动葫芦的电动机通常采用交流电机或直流电机,其工作原理是利用电磁感应原理将电能转化为机械能。
当电流通过电动机的线圈时,产生的磁场与磁极相互作用,产生转矩,使电动机转动。
电动机的转速和转矩通过减速器和齿轮传动装置传递给吊钩,实现物品的起升和下降。
减速器是电动葫芦的重要组成部分,它的作用是将电动机的高速转动转化为吊钩的低速高力矩转动。
减速器通常采用齿轮传动装置,将电动机的高速转动通过齿轮的啮合传递给吊钩,实现起升和下降。
制动器是电动葫芦的安全保护装置,它的作用是在电动机停止工作时,防止吊钩下落造成危险。
制动器通常采用电磁制动器或机械制动器,当电动机停止工作时,制动器立即起作用,将吊钩固定在当前位置,防止下落。
吊钩是电动葫芦的重要组成部分,它的作用是悬挂物品并实现起升和下降。
吊钩通常采用钢丝绳或链条等材料制成,具有一定的承载能力和耐磨性。
吊钩上还配有安全挂钩和滑轮等部件,以确保操作安全和方便。
控制系统是电动葫芦的核心部分,它的作用是控制电动机的启动、停止、正反转和速度等参数。
控制系统通常采用电气控制器或变频器等设备,具有精度高、响应快、安全可靠等特点。
二、电动葫芦的组成部分1.电动机电动葫芦的电动机通常采用交流电机或直流电机,其工作原理是利用电磁感应原理将电能转化为机械能。
电动机通常分为单相电机和三相电机两种类型,单相电机适用于小型电动葫芦,而三相电机适用于大型电动葫芦。
2.减速器减速器是电动葫芦的重要组成部分,它的作用是将电动机的高速转动转化为吊钩的低速高力矩转动。
电动葫芦原理
电动葫芦是一种利用电力作为动力源进行物体的升降运动的装置。
它主要由电动机、齿轮系统、钢丝绳和控制系统等组成。
电动葫芦的工作原理如下:
1. 电动机:电动葫芦采用电动机作为动力源。
电动机接通电源后,会产生驱动力。
2. 齿轮系统:电动葫芦中的齿轮系统起着传动力的作用。
电动机驱动齿轮转动,通过齿轮的传动,将动力传递给钢丝绳。
3. 钢丝绳:电动葫芦中的钢丝绳承担物体的承载任务。
钢丝绳通过滑轮或滑车的支持,形成了一个闭合的回路。
当电动机驱动钢丝绳旋转时,物体便可进行升降运动。
4. 控制系统:电动葫芦中的控制系统用于控制电动机的启停和运转方向。
通过控制系统,可以实现葫芦的升降、停止和反向运动等操作。
总之,电动葫芦通过电动机产生的动力,通过齿轮系统将动力传递给钢丝绳,从而实现物体的升降运动。
控制系统则起到控制和调节电动葫芦运行的作用。
这种装置在吊装、运输和搬运等领域中得到广泛应用。
电动葫芦电机工作原理
电动葫芦的工作原理是利用电动机驱动葫芦齿轮传动装置实现起重和运输物品的功能。
电动葫芦主要由电动机、齿轮传动装置和起重机构组成。
当电动机启动时,电能被转化成机械能,驱动葫芦正常工作。
电动葫芦的电机通常采用交流电动机或直流电动机。
当电源接通后,电流通过电机的定子线圈产生磁场。
定子磁场与转子磁场之间的互相作用力使得转子开始旋转。
电动葫芦通常通过变速器来调整电机的转速,以便根据不同的载荷和起重要求来提供合适的运行速度。
齿轮传动装置一般由多组齿轮组成,通过齿轮的相互啮合来提供扭矩输出和速度变换。
电动葫芦的齿轮传动装置通常包括主动轮、从动轮和中间轮。
电机驱动主动轮旋转,然后通过齿轮的传动作用,将转动力传递给从动轮或中间轮,从而驱动葫芦上下运行或前后移动。
起重机构由绳盘、绳索和吊钩等部分组成。
绳盘固定在葫芦的底部,绳索绕绳盘上下缠绕,与吊钩相连接。
当电动葫芦运行时,绳盘会带动绳索缠绕或释放,从而使吊钩上升或下降,实现物品的起重和运输。
总体而言,电动葫芦的工作原理是利用电动机产生的旋转力驱动齿轮传动装置,通过绳索和吊钩实现起重和运输物品的功能。
电动葫芦原理
电动葫芦是一种常见的起重设备,它利用电动机驱动,通过钢丝绳或链条来实现货物的吊装和移动。
那么,电动葫芦的原理是怎样的呢?接下来,我们就来详细了解一下电动葫芦的工作原理。
首先,电动葫芦的核心部件是电动机。
电动机通过电能转换为机械能,驱动葫芦的起重运动。
电动机的转动产生的动力通过齿轮箱传递到葫芦的卷筒上,从而带动钢丝绳或链条进行起重作业。
电动机的功率大小直接影响着葫芦的起重能力,因此在选择电动葫芦时,需要根据实际起重需求来确定电动机的功率大小。
其次,电动葫芦的卷筒是起重的关键部件。
卷筒通常由钢制而成,其直径和长度的大小会影响到葫芦的起重高度和速度。
卷筒上的钢丝绳或链条通过卷筒的旋转来实现货物的起升和下降,卷筒的设计和制造质量直接关系到葫芦的使用寿命和安全性能。
此外,电动葫芦还配备有控制系统。
控制系统通常由电控箱、按钮控制器、限位器等组成,通过控制系统可以实现对电动葫芦的起升、下降、停止等操作。
在起重作业中,操作人员可以通过按钮控制器来控制货物的起升和下降,同时限位器可以对起重高度进行限制,确保起重作业的安全进行。
最后,电动葫芦还包括了一些辅助装置,如制动器、重载保护装置等。
制动器可以在停止电动机时对卷筒进行制动,确保货物的安全停放。
重载保护装置可以在货物超载时自动停止起重操作,保护设备和人员的安全。
总的来说,电动葫芦的原理是通过电动机驱动卷筒上的钢丝绳或链条进行起重作业,同时配备有控制系统和辅助装置来保证起重作业的安全和可靠进行。
在实际使用中,需要根据起重需求和工作环境来选择合适的电动葫芦,并严格按照操作规程进行操作,确保起重作业的安全进行。
环链电动葫芦内部结构一、引言环链电动葫芦是一种常见的起重设备,广泛应用于工厂、仓库等场所。
其内部结构复杂,由多个组件组成。
本文将对环链电动葫芦的内部结构进行详细介绍。
二、概述环链电动葫芦主要由电机、减速器、制动器、离合器、齿轮箱等组件组成。
其中,电机是驱动设备的核心部件,减速器则起到减速增扭作用,制动器和离合器则控制设备的启停和运行方向。
齿轮箱则是将电机输出的转矩传递到起重钩上。
三、电机1. 选型环链电动葫芦所使用的电机一般为交流异步电机或直流有刷或无刷直流电机。
2. 结构电机主要由定子和转子两部分组成。
定子包括铁心和绕组,转子则包括轴和磁极。
3. 功能电机通过旋转产生转矩,驱动齿轮箱旋转,并最终使起重钩上升或下降。
四、减速器1. 选型环链电动葫芦所使用的减速器一般为齿轮减速器或行星减速器。
2. 结构减速器主要由输入轴、输出轴和多个齿轮组成。
其中,输入轴与电机相连,输出轴与齿轮箱相连。
3. 功能减速器通过降低电机输出的转速,提高转矩,并将其传递到齿轮箱上。
五、制动器和离合器1. 选型环链电动葫芦所使用的制动器和离合器一般为手动或自动切换式。
2. 结构制动器和离合器主要由摩擦片、弹簧等部件组成。
3. 功能制动器用于控制设备的停止,离合器则用于控制设备的启停和运行方向。
六、齿轮箱1. 选型环链电动葫芦所使用的齿轮箱一般为蜗杆齿轮传动或斜齿轮传动。
2. 结构齿轮箱由多个齿轮组成,其中包括蜗杆、小齿轮、大齿轮等部件。
3. 功能将电机输出的转矩传递到起重钩上,并控制其升降。
七、总结环链电动葫芦内部结构由电机、减速器、制动器、离合器和齿轮箱等部件组成。
其工作原理为电机通过旋转产生转矩,驱动齿轮箱旋转,并最终使起重钩上升或下降。
在使用环链电动葫芦时,需要注意设备的安全性和维护保养。
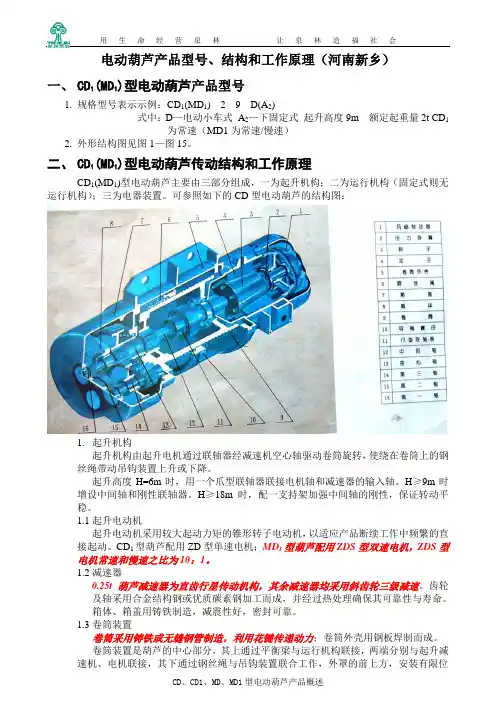
电动葫芦产品型号、结构和工作原理(河南新乡)一、CD1(MD1)型电动葫芦产品型号1.规格型号表示示例:CD1(MD1) 2 9 D(A2)式中:D—电动小车式A2—下固定式起升高度9m 额定起重量2t CD1为常速(MD1为常速/慢速)2.外形结构图见图1—图15。
二、CD1(MD1)型电动葫芦传动结构和工作原理CD1(MD1)型电动葫芦主要由三部分组成,一为起升机构;二为运行机构(固定式则无运行机构);三为电器装置。
可参照如下的CD型电动葫芦的结构图:1.起升机构起升机构由起升电机通过联轴器经减速机空心轴驱动卷筒旋转,使绕在卷筒上的钢丝绳带动吊钩装置上升或下降。
起升高度H=6m时,用一个爪型联轴器联接电机轴和减速器的输入轴。
H≥9m时增设中间轴和刚性联轴器。
H≥18m时,配一支持架加强中间轴的刚性,保证转动平稳。
1.1起升电动机起升电动机采用较大起动力矩的锥形转子电动机,以适应产品断续工作中频繁的直接起动。
CD1型葫芦配用ZD型单速电机;MD1型葫芦配用ZDS型双速电机,ZDS型电机常速和慢速之比为10:1。
1.2减速器0.25t葫芦减速器为直齿行星传动机构,其余减速器均采用斜齿轮三级减速。
齿轮及轴采用合金结构钢或优质碳素钢加工而成,并经过热处理确保其可靠性与寿命。
箱体、箱盖用铸铁制造,减震性好,密封可靠。
1.3卷筒装置卷筒采用铸铁或无缝钢管制造,利用花键传递动力;卷筒外壳用钢板焊制而成。
卷筒装置是葫芦的中心部分,其上通过平衡梁与运行机构联接,两端分别与起升减速机、电机联接,其下通过钢丝绳与吊钩装置联合工作,外罩的前上方,安装有限位器导杆装置。
1.4吊钩装置吊钩采用专用钢锻制而成,并用推力球轴承通过吊钩横梁与外壳联接,使吊钩运转自如。
5t及其以下吊钩装置采用单滑轮式,10t及其以上为双滑轮式。
2.运行机构电动小车、运行电机、运行减速器、从动小车共同组成运行机构。
悬挂着主机作往复移动。
其运行速度一般为20m/min,亦可选用30m/min,1—5t起升高度≥12m时,增加一套从动小车。
电动葫芦的工作原理
电动葫芦的工作原理是利用电能驱动电机,从而产生力矩,使葫芦悬臂运动。
电动葫芦一般由电机、齿轮箱、制动器、提升机构、行走机构和控制系统等组成。
首先,电机是电动葫芦的动力源,将电能转换为机械能。
电动葫芦一般采用交流电动机或直流电动机。
电机通过电源的供电,产生旋转磁场,将电能转化为机械能。
其次,电机将转动力传递到齿轮箱中。
齿轮箱是由多个齿轮组成的传动机构,通过齿轮的传动和减速,增大扭力的输出,并将转速降低到适合提升物体的速度。
然后,制动器起到安全保护作用。
制动器通常设置在电动葫芦的动力输出轴上,可以通过电磁或机械装置实现制动或解除制动的功能。
当葫芦停止提升或行走时,制动器会自动将其锁定,防止意外滑动或下坠。
接着,提升机构是实现葫芦悬臂运动的核心部件。
它通常由起升齿轮、绞车钩、钢丝绳等组成。
电机的旋转力通过齿轮传输到绞车钩,使其起升或下降,通过卷绕和放松钢丝绳实现载荷的提升和下降。
最后,行走机构使葫芦具备行走功能。
行走机构通常由驱动轮、行走电机、减速器等组成。
通过电动机提供的动力,驱动轮转
动,使葫芦能够在轨道上行走,实现物体的横向移动。
控制系统是整个电动葫芦的大脑,用于控制电机、制动器、提升机构和行走机构的运行。
控制系统通常由电源开关、按钮、遥控器等操作元件和电气元件组成,可以实现电动葫芦的起动、停止、提升、下降、行走等功能。
综上所述,电动葫芦通过电能驱动电机,并通过齿轮传动、制动器、提升机构、行走机构和控制系统等相互配合,实现载荷的提升、下降和横向移动。
电动葫芦的工作原理电动葫芦是一种常见的用于起重、搬运和吊装的机械设备,它采用电动驱动方式代替了人力操作,为工作带来了便捷和高效。
本文将详细介绍电动葫芦的工作原理。
一、电动葫芦的组成部分1.1 电动机:电动葫芦的核心部件,通过电力驱动起重机构进行工作。
1.2 减速机:将电动机的转速降低,并提供足够的扭矩输出。
1.3 提升机构:由驱动轮、钢丝绳、卷筒等组成,实现起重物的垂直上升和下降。
二、电动葫芦的工作原理2.1 供电系统:电动葫芦通常使用交流电源或直流电源进行供电。
供电系统将电能转化为机械能,为电动机提供所需的驱动力。
2.2 电动机转动:电动葫芦中的电动机受到供电系统的供电后,产生转动力。
电动机的转速和扭矩可以通过电源的控制设备进行调节和控制。
2.3 传动装置:电动葫芦中的转动力通过减速机传递给提升机构。
减速机将电机高速转动的轴通过一系列的齿轮和传动机构进行降速,并输出给提升机构。
2.4 提升机构:提升机构是电动葫芦核心的工作部分,它由驱动轮、钢丝绳和卷筒组成。
电动葫芦的提升机构通过减速机输出的转动力带动驱动轮旋转,同时通过卷筒将钢丝绳放出或收回,从而实现起重物的升降。
三、电动葫芦的特点和应用3.1 高效便捷:相较于传统的人力搬运,电动葫芦可以快速、高效地完成起重、搬运和吊装作业,减少了人力消耗和工作时间。
3.2 安全可靠:电动葫芦设有多重保护装置,如限位器、重载保护装置和二重制动系统等,确保操作的安全性和设备的稳定性。
3.3 灵活多样:电动葫芦具有多种规格和型号可供选择,以适应不同场合的工作需求。
同时,还可以根据需要进行定制和改装,提供更大的吨位和更长的工作半径。
3.4 广泛应用:电动葫芦广泛应用于工厂、仓库、码头、建筑工地等各个领域,常见于起重、搬运、吊装物料和大型设备等作业中。
四、注意事项和维护保养4.1 遵循操作规程:在使用电动葫芦前,请详细阅读用户手册,并遵循操作规程。
严禁在超载、故障或不安全的条件下使用设备。
电动葫芦的原理与应用1. 电动葫芦的基本原理电动葫芦是一种常见的起重工具,它通过电机驱动来提升和移动重物。
其基本原理可以简要概括如下:•电机驱动:电动葫芦内装有一台电动机,通过电源供电,电机产生转动力,驱动起重机构;•起重机构:电动葫芦的起重机构包括绳轮、钢丝绳和滑轮等组件。
电机转动时,通过绳轮将转动力传递给钢丝绳,钢丝绳再通过滑轮等组件将力量传递给起重物体;•控制系统:电动葫芦内置有控制系统,用于控制电机的启动、停止和方向。
2. 电动葫芦的应用领域电动葫芦广泛应用于各个行业的起重作业中,其主要应用领域包括但不限于以下几个方面:2.1 工业制造•厂房搬运:在工业制造过程中,电动葫芦可用于搬运重量较大的物体,如机器设备、零部件等;•装卸工作:电动葫芦可配合其他设备,用于装卸货物,提高工作效率;•生产线上使用:电动葫芦可以被安装在流水线上,用于提升和移动物体。
2.2 建筑工程•施工场地:电动葫芦可以用于建筑工地上的各种起重作业,如吊装钢筋、运输建筑材料等;•高空作业:电动葫芦可以安装在起重机械上,用于高空施工作业。
2.3 物流和仓储•仓储场所:电动葫芦能够提高仓库内货物的储存密度,便于搬运和整理货物;•货物装卸:电动葫芦可用于物流中心、货运码头等地方,用于货物的装卸作业。
2.4 其他领域•汽车维修:电动葫芦在汽车维修行业中可以用于拆卸和组装引擎等重量较大的部件;•演艺舞台:电动葫芦可以用于舞台上的灯光和音响设备的升降。
3. 选购电动葫芦的注意事项对于需要购买电动葫芦的用户,以下几点是需要注意的事项:•起重量:了解所需起重物体的重量,选择适合的电动葫芦起重量;•起升高度:根据作业需求确定所需的起升高度范围;•工作环境:考虑工作环境的特殊要求,如防爆、防腐蚀等;•安全性能:了解电动葫芦的安全性能,如过载保护、断电刹车等;•服务和售后:选择具有良好信誉和售后服务的供应商。
4. 维护保养电动葫芦的建议为了延长电动葫芦的使用寿命和保障工作安全,以下是一些建议的维护保养措施:•定期检查:定期检查电动葫芦的关键部件,如电机、制动器、绳轮等;•清洁保养:及时清洁电动葫芦,防止灰尘和腐蚀物进入设备内部;•润滑维护:根据使用手册要求,按时对电动葫芦的润滑点进行加油和润滑;•维护记录:建立维护记录,记录维护时间和内容,方便跟踪和管理。
电动葫芦工作原理
电动葫芦是一种利用电力驱动的起重设备,它由电动机、减速器、制动器、卷筒、钢丝绳以及输电系统等部分组成。
电动葫芦的工作原理是通过电动机产生的动力驱动减速器工作,将高速输入转换为低速高扭矩的输出。
减速器将转速降低后传递给制动器,制动器通过制动摩擦片的压紧或松开来控制卷筒上的回转或停止。
钢丝绳由卷筒紧紧地绕绕在上面,当电动葫芦工作时,钢丝绳通过吊钩连接着要提起的物体。
在工作时,电动葫芦的输电系统将电能传输到电动机,电动机开始转动。
电动机带动减速器工作,减速器的输出轴带动卷筒回转或停止。
当电动葫芦需要提起物体时,通过控制制动器松开制动摩擦片,卷筒受动力驱使而回转,钢丝绳带动吊钩向上提升物体。
当物体达到所需高度后,松开控制制动器的力,制动器压紧制动摩擦片,使卷筒停止回转,实现起重物体的停止。
电动葫芦的工作原理主要依赖于电动机、减速器和制动器的配合工作,通过输电系统的电能传输和控制,使得起重物体能够实现精确的提升和停止。
这种起重设备广泛应用于工业、建筑等领域,提高了物体起重的效率和安全性。
电动葫芦一、机构原理ZH电动葫芦主要由三部分组成,即起升机构、运行机构及电气装置。
1.采用电动机、行星减速机、电气装置成一直线布置,减速机置于卷筒之内,结构紧凑、协调,布局合理。
起升机构由起升电机通过联轴器经行星减速器、输出轴驱动卷筒旋转,使绕在卷筒上的钢丝绳带动吊钩装置上升或下降。
1.1起升电动机电机绕组具有可靠的温度监控保护装置。
它采用较大起动力矩的锥形转子电动机,以适应产品断续工作中频繁的直接启动。
电动机与制动器结合一体,制动可靠,调节方便。
1.2减速机减速机采用三级行星齿轮传动,结构紧凑、效率高,采用极压工业齿轮油润滑,装于全封闭箱体内,且装有净油装置,有效提高齿轮寿命;齿轮选用优质合金钢,经滚齿、渗碳淬火、磨齿工艺处理,齿轮精度高、噪音低、强度、耐磨性好、传动效率显著提高,有效节约能源。
1.3卷筒和机架卷筒采用无缝钢管制造,能制成高卷扬电动葫芦,利用渐开线花键传递动力,承载能力好。
机架采用方形结构,整体外形美观,安装、运输方便。
1.4导绳器防乱绳导绳器,有效防止上升、下降过程中出现钢丝绳乱缠绕现象,可保证在没有吊钩作用的情况下,钢丝绳能通畅地从导绳器出绳口中排出而不乱绳。
1.5联轴器联轴器由6个星轮和两个半联轴器组成,能有效吸收冲击载荷及补偿安装误差。
1.6吊钩装置吊钩采用吊钩专用钢锻制而成,并用推力球轴承通过吊钩横梁与外壳连接,保证吊钩在水平360°内运转自如。
吊钩装置可采用单滑轮、双滑轮或四滑轮等形式。
1.7钢丝绳钢丝绳采用GB8918,6×36SW+FC型或18×7+FC型起重用线接触钢丝绳,强度高,经久耐用,可根据用户需要采用挠性更佳的钢丝绳。
2.运行机构运行机构由三合一驱动装置、主动装置、从动轮组等共同组成,可安装在单梁起重机的主梁下方、安装在单梁起重机主梁侧面、安装在单梁起重机主梁的上面、也可安装在双梁起重机两主梁的上面,在轨道上做往复移动。
其运行速度(m/min)一般为20,也可选用10、12.5、16、25或30,双速可选用20/10、20/6.7、20/5。
电动葫芦工作原理
电动葫芦是一种常用的升降装置,它利用电动机驱动来完成升降过程。
其工作原理可以简单描述为以下几个步骤:
1. 电动葫芦中的电动机通过电源供电,产生旋转力矩。
2. 电动机的旋转力矩通过齿轮传动系统传递给升降机构。
传动系统通常由齿轮和链条组成,能够有效地将电动机的旋转运动转换为升降运动。
3. 升降机构中的齿轮将驱动力传输给升降轴。
升降轴是电动葫芦的核心部件,通过旋转或滑动来完成货物的升降。
4. 升降轴上通常配备有升降装置,例如葫芦钩。
葫芦钩是用于吊装货物的装置,其上可以悬挂各类物品。
5. 当电动机运转时,升降轴随之旋转或滑动,从而带动升降装置完成货物的升降运动。
6. 通过控制电动机的供电电压和方向,可以实现升降速度的调节和升降方向的控制。
电动葫芦在工业生产、仓储物流等领域具有广泛的应用,能够满足各类货物的升降需求。
其工作原理简单明了,通过电动机的驱动和齿轮传动系统的运作,实现了货物的高效举升和运输。