基于COSM0SMotion软件的机构动态仿真与应用
- 格式:pdf
- 大小:286.63 KB
- 文档页数:3

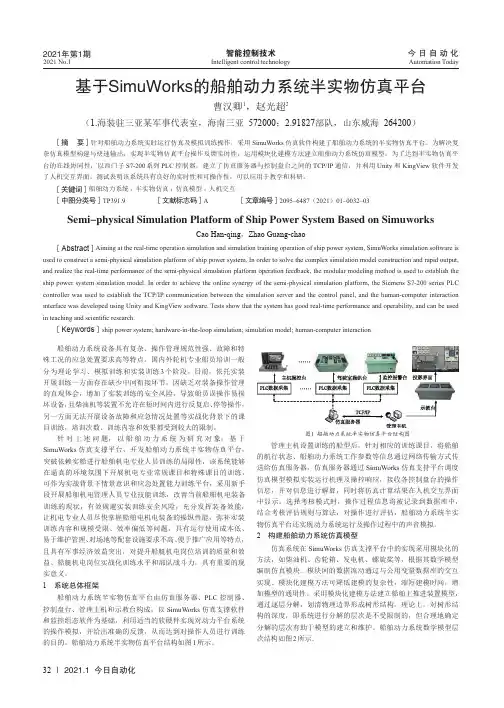
船舶动力系统半实物仿真平台结构图管理主机设置训练的船型后,针对相应的训练课目,将船舶1号通风机电源2号通风机电源启 动停 止启 动停 止图4 操控人机交互界面图5 动力管系人机交互界面4 基于PLC的协同控制利用KingView实现船舶动力系统半实物仿真平台硬件设备系统的监控,可减少功能的细节实现和监控程序的架构关心,开发人员只要将组态功能予以组合并且赋予特殊的逻辑就能实现想要的功能。
平台开发过程中,首先需要的人机交互界面,其次定义所需的外部设备,然后定义内存变量和I/O变量。
内存变量用于服务于程序本身的运行,I/O变量则负责与外部设备进行数据交互。
PLC控制器从盘台中采集数据,存于实时数据库中,并将数据的变化发送给人机交互界面用动画的方式形象地表示出来;对控制设备输入信号,经仿真软件进行逻辑判断及仿真计算,通过PLC智能控制技术今 日 自 动 化34 | 2021.1 今日自动化Intelligent control technologyAutomation Today2021年第1期2021 No.1SH753型管道式烘丝机利用气流干燥原理,靠短时高温的作用去除梗丝内多余的水分,使其膨胀的体积固定下来,使处理后的叶丝水份达到11%~14%,填充值大于6.0 cm 3/g ,以满足卷烟工艺要求。
1 原理简介气流干燥烘丝机的欧宝燃烧炉由炉本体、燃烧器、助燃风机、电气控制系统组成,在整个工艺加工流程中,燃烧炉提供烘丝所需要的热能。
设备使用要求:炉内温度高于100 ℃时,必须使用空压气进行冷却,保证燃烧器点火头部位(即火焰探测器)不至于长期处在在高温环境下,延长火焰探测器的使用寿命。
因此,炉头空压系统是烘丝机的稳定运行的保障,对其的维护至关重要。
2 原因分析位于梗线SH753烘丝机端部的燃烧器,其炉头部位工作温度要求为80 ℃,生产过程通过人工开取手动阀持续供给空压气进行冷却,使炉头温度在80 ℃上下浮动且不超过100 ℃,以保证烘丝机稳定运行。
Solidworks机构运动仿真与分析SolidworksMotion有限元分析广泛应用于机械、汽车、家电、电子产品、家具、建筑、医学骨科等产品设计及研发。
其作用是:确保产品设计的安全合理性,同时采用优化设计,找出产品设计最佳方案,降低材料的消耗或成本; 在产品制造或工程施工前预先发现潜在的问题; 模拟各种试验方案,减少试验时间和经费; 是产品设计研发的核心技术,SolidworksMotion机构运动仿真与分析机械也被应用于机械设计中。
看板网拥有超过数十年的Solidworks有限元分析项目经验和培训经验。
我们知道,机械制造工业水平的高低直接代表了了该国家或地区的经济、科技、国防等方面水平的高低。
传统的机械设计主要以静态分析、近似计算、经验设计、手工劳动伟特种的设计方法,存在着设计周期长、人为影响因数多、稳定性和可靠性差等一系列问题。
计算机辅助设计在现代机械设计中应用,不仅可以借助一些仿真软件,可以在设计过程中即可分析出机构、设备的薄弱点、干涉区域等等一些传统设计方法无法实现的功能。
还可以有效的缩短设计周期。
Solidworks Motion是一个虚拟原型机仿真工具,对浮渣机械系统能实现全面的动力学和运动学仿真,并可得到系统中零件的作用力、反作用力、速度、加速度以及位移等运动参数。
并且输出结果能以动画、图形以及表格等多种形式表示。
此外,在复杂运动情况下,还能在其他有限元分析软件中输入零部件的复杂载情况,从而能对其结构和强度进行准确的分析。
Solidworks Motion支持同轴心配合、铰链配合、点对点重合配合、锁定配合、面对面的重合配合、万向节配合、螺旋配合、点在轴线上的重合配合、平行配合、垂直配合的配合约束等多种配合。
Solidworks Motion可分别按速度、位移和加速度配合时间、循环角度和角速度可以定义相对简单的运动,另外,该软件也完全支持比如立方样条曲线、线『生曲线、Akima样条曲线,这样就可以定义较复杂的运动。

现代电子技术Modern Electronics TechniqueDec.2021Vol.44No.242021年12月15日第44卷第24期0引言并联机构是一种具有多自由度,并通过驱动装置在不同环路上装配的机构,若将并联机构应用在操作器中,则称为并联机器人[1⁃3]。
并联机器人可以在工业、医用等多个领域广泛应用。
而并联机器人在使用和设计中,需要考虑到机器人的正逆运动解值的问题,正运动是通过对各驱动杆的运动,带动运动平台形成不同位姿;而逆运动则是通过运动平台带动驱动杆进行运动,在设计中对其运动学分析的方法通常为数值法和解析法[4⁃6]。
但单纯的机构动力分析方法所得出的计算结果精度不高,同时只能得出相关驱动杆的长度和运动速度,无法判断运动曲线。
而随着计算机技术的提高,各类仿真方法开始应用在机构运动学领域,弥补了之前的DOI :10.16652/j.issn.1004⁃373x.2021.24.039引用格式:乔栋,谢亚龙,李博文,等.基于Matlab 的并联机器人机构动力分析与动态仿真[J].现代电子技术,2021,44(24):182⁃186.基于Matlab 的并联机器人机构动力分析与动态仿真乔栋1,谢亚龙1,李博文1,姚涛2(1.山西大同大学,山西大同037009;2.河北工业大学,天津300401)摘要:在当前的机器人机构动力分析方法以及相关仿真工作中,仅能对机器人的单一运动方向进行仿真,若变换方向则需重新建立模型,导致其仿真精度低、效率差。
因此,文中提出基于Matlab 的并联机器人机构动力分析与动态仿真。
首先建立并联机器人的数学模型,以确定机器人运动机构的运动初始位置及其坐标;其次根据拉格朗日方程获得机器人的动力平台相关参数,并对其进行动力平台分析,根据获取的参数分析结果进行机器人的运动描述。
最后将上述内容作为仿真基础,导入Matlab 软件中,实现动态仿真。
为了验证设计方法的可行性,使用该方法对某型号的并联机器人进行仿真实验。