高斯一拉普拉斯边缘检测算子的扩展研究严国萍何俊峰(华中科技大
- 格式:pdf
- 大小:2.48 MB
- 文档页数:3
(下转第101页)基于拉普拉斯边缘检测算子的图像分割张建光1,李永霞2(1.衡水学院数学与计算机系河北衡水0530002.衡水学院教育系河北衡水053000)【摘要】:通过分析作为二阶梯度的拉普拉斯公式,得出可应用到实践图像分割中的拉普拉斯边缘检测算子,并通过VC++6.0加以实现。
分析图像分割结果,并对拉普拉斯边缘检测算子进行利弊分析。
【关键词】:拉普拉斯算子;梯度;图像分割1.拉普拉斯边缘检测算子理论基础拉普拉斯算子是二阶导数的二维等效式[1].函数f(x,y)的拉普拉斯算子公式为(1)使用差分方程对x 和y 方向上的二阶偏导数近似如下:(2)这一近似式是以点[i,j+1]为中心的.用j-1替换j ,得到(3)它是以点[i,j]为中心的二阶偏导数的理想近似式,类似地,(4)2.拉普拉斯边缘检测算子常用形式把上述两个式子合并为一个算子,就成为下面能用来近似拉普拉斯算子的模板[2]:(5)有时希望邻域中心点具有更大的权值,比如下面的模板就是一种基于这种思想的近似拉普拉斯算子:(6)当拉普拉斯算子输出出现过零点时就表明有边缘存在,其中忽略无意义的过零点(均匀零区).原则上,过零点的位置精度可以通过线性内插方法精确到子像素分辨率,不过由于噪声,结果可能不会很精确.可把拉普拉斯算子变为为:计算一阶导数的边缘检测器,如果所求的一阶导数高于某一阈值,则确定该点为边缘点。
这样做会导致检测的边缘点太多。
拉普拉斯算子是一种更好的方法,通过求梯度局部最大值对应的点,并认定它们是边缘点,一阶导数的局部最大值对应着二阶导数的零交点这意味着在边缘点处有一阶导数的峰值,同样地,有二阶导数的零交叉点.这样,通过找图像强度的二阶导数的零交叉点就能找到边缘点。
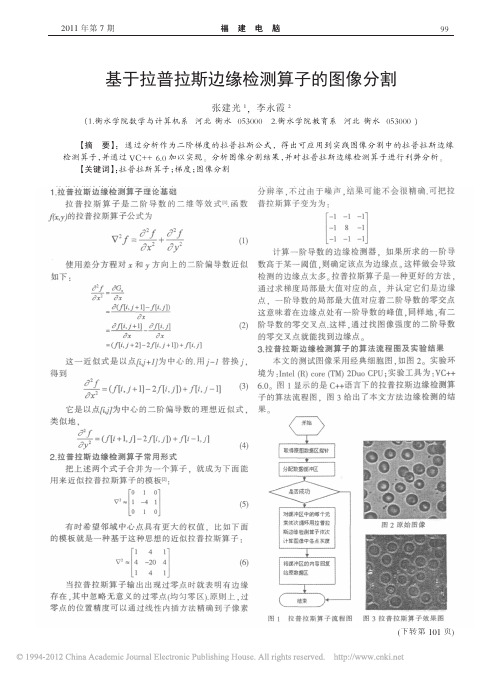
3.拉普拉斯边缘检测算子的算法流程图及实验结果本文的测试图像采用经典细胞图,如图2。
实验环境为:Intel (R)core (TM)2Duo CPU ;实验工具为:VC++6.0。
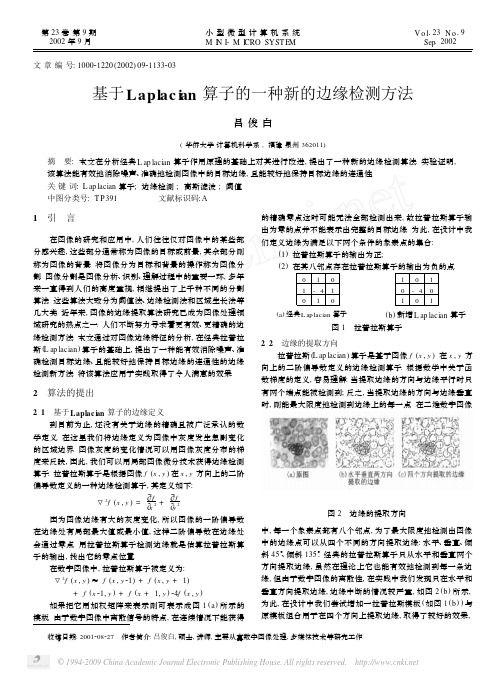
文章编号:100021220(2002)0921133203 收稿日期:2001208227 作者简介:吕俊白,硕士,讲师,主要从事数字图像处理,多媒体技术等研究工作.基于Laplac i an 算子的一种新的边缘检测方法吕俊白(华侨大学计算机科学系,福建泉州362011)摘 要:本文在分析经典L ap lacian 算子作用原理的基础上对其进行改进,提出了一种新的边缘检测算法.实验证明,该算法能有效地消除噪声、准确地检测图像中的目标边缘,且能较好地保持目标边缘的连通性.关键词:L ap lacian 算子;边缘检测;高斯滤波;阈值中图分类号:T P 391 文献标识码:A1 引 言在图像的研究和应用中,人们往往仅对图像中的某些部分感兴趣,这些部分通常称为图像的目标或前景,其余部分则称为图像的背景.将图像分为目标和背景的操作称为图像分割.图像分割是图像分析、识别、理解过程中的重要一环,多年来一直得到人们的高度重视,相继提出了上千种不同的分割算法.这些算法大致分为阈值法、边缘检测法和区域生长法等几大类.近年来,图像的边缘提取算法研究已成为图像处理领域研究的热点之一.人们不断努力寻求着更有效、更精确的边缘检测方法.本文通过对图像边缘特征的分析,在经典拉普拉斯(L ap lacian )算子的基础上,提出了一种能有效消除噪声、准确检测目标边缘、且能较好地保持目标边缘的连通性的边缘检测新方法.将该算法应用于实践取得了令人满意的效果.2 算法的提出2.1 基于Laplac i an 算子的边缘定义到目前为止,还没有关于边缘的精确且被广泛承认的数学定义.在这里我们将边缘定义为图像中灰度发生急剧变化的区域边界.图像灰度的变化情况可以用图像灰度分布的梯度来反映,因此,我们可以用局部图像微分技术获得边缘检测算子.拉普拉斯算子是根据图像f (x ,y )在x ,y 方向上的二阶偏导数定义的一种边缘检测算子,其定义如下:2f (x ,y )=52f x 2+52fy 2 因为图像边缘有大的灰度变化,所以图像的一阶偏导数在边缘处有局部最大值或最小值,这样二阶偏导数在边缘处会通过零点.用拉普拉斯算子检测边缘就是估算拉普拉斯算子的输出,找出它的零点位置.在数字图像中,拉普拉斯算子被定义为:2f (x ,y )≈f (x ,y 21)+f (x ,y +1) +f (x 21,y )+f (x +1,y )24f (x ,y ) 如果把它用加权矩阵来表示则可表示成图1(a )所示的模板.由于数字图像中离散信号的特点,在连续情况下能获得的精确零点这时可能无法全部检测出来,故拉普拉斯算子输出为零的点并不能表示出完整的目标边缘.为此,在设计中我们定义边缘为满足以下两个条件的象素点的集合:(1)拉普拉斯算子的输出为正;(2)在其八邻点存在拉普拉斯算子的输出为负的点.0101-4101(a )经典L ap lacian 算子1010-4011 (b )新增L ap lacian 算子图1 拉普拉斯算子2.2 边缘的提取方向拉普拉斯(L ap lacian )算子是基于图像f (x ,y )在x ,y 方向上的二阶偏导数定义的边缘检测算子.根据数学中关于函数梯度的定义,容易理解:当提取边缘的方向与边缘平行时只有两个端点能被检测到;反之,当提取边缘的方向与边缘垂直时,则能最大限度地检测到边缘上的每一点.在二维数字图像图2 边缘的提取方向中,每一个象素点都有八个邻点,为了最大限度地检测出图像中的边缘点可以从四个不同的方向提取边缘:水平、垂直、倾斜45°、倾斜135°.经典的拉普拉斯算子只从水平和垂直两个方向提取边缘,虽然在理论上它也能有效地检测到每一条边缘,但由于数字图像的离散性,在实践中我们发现只在水平和垂直方向提取边缘,边缘中断的情况较严重,如图2(b )所示,为此,在设计中我们尝试增加一拉普拉斯模板(如图1(b ))与原模板组合用于在四个方向上提取边缘,取得了较好的效果, 第23卷第9期 2002年9月小型微型计算机系统M I N I -M I CRO SYST E M V o l 123N o 19 Sep .2002 如图2(c )所示.3 噪声的消除因为微分是一种高通运算,所以二阶微分会增强噪声对图像的影响,这样,拉普拉斯算子有时找到的边缘将是伪边缘.为了克服拉普拉斯算子对噪声敏感这一弱点,在设计中我们根据噪声的特点采用高斯滤波和取阈值两种方法相结合有效地消除了噪声对图像的影响,获得了较清晰的图像边缘.图像中的噪声通常可以分为两大类:一类是较尖锐的脉冲噪声,它通常是随机的;另一类是背景中的一些微小起伏.在设计中对于前者我们采用高斯滤波消除,对后者我们则采用取阈值的方法克服.3.1 高斯滤波为消除图像中的脉冲噪声,本设计采用如下Gauss 模板G 对原始灰度图进行平滑处理.其作用原理:让加权矩阵G 与p 0p 1p 2p 7p p 3p 6p 5p 4图3 中央象素点P 的八邻域图像f (x ,y )中的一个3×3区域(如图3)进行积和运算,其结果作为中央象素点P 的灰度值.实验证实高斯滤波能有效地消除图像的尖锐噪声.G =1161212421213.2 取阈值高斯滤波是一种低通滤波,它能有效消除图像中的脉冲噪声,但对于图像中的一些相对微小的起伏作用并不明显.为此,我们采用取阈值的方法来消除这类噪声.在实验中我们发现:若仅选取一个阈值T ,当梯度大于T 时输出1;当梯度小于T 时输出0.这样提取的边缘对于阈值T 的选取非常敏感:如果要保证所有的边缘象素都被检测到,则许多非边缘象素也将被误作为边缘输出;如果想滤掉所有的非边缘象素,则与此同时许多边缘象素也将被漏检.为了提高边缘检测的精度,保持边缘的连通性,设计中我们采用了双阈值策略:设定两个阈值T 1>T 2,若某个象素的梯度值大于T 1,则它立即被作为边缘输出;若某个象素的梯度值小于T 2,则断定它不是边缘;对于那些梯度值小于T 1且大于T 2的象素,则需进一步考虑其八邻点的具体情况而后取舍,如果八邻点中存在有边缘点,为保证边缘的连通性我们也把它作为边缘点输出.其中T 1、T 2则由下式确定.T 1=T m in +(T m ax 2T m in ) val 1 T 2=T m in +(T m ax 2T m in ) val 2T m ax 为图中梯度的最大值;T m in 为图中梯度的最小值;val 1,val 2由用户通过交互方式选取.4 算法的实现基于以上分析,对一幅M ×N 的图像f (x ,y )进行边缘提取的步骤如下:步骤1:对原灰度图像f (x ,y )进行高斯滤波以消除脉冲噪声,得到滤波后的图像g (x ,y );步骤2:对图像g (x ,y )分别用经典L ap lacian 算子和新增L ap lacian 算子进行边缘检测得g 1(x ,y )和g 2(x ,y ).Step 1:利用经典L ap lacian 算子对图像g (x ,y )进行处理,得temp i m g (x ,y );Step 2:对temp i m g (x ,y )中的每一点temp i m g (x i ,y i ),if (temp i m g (x i ,y i )>0){ 选取temp i m g (x i ,y i )八邻点中的最小值g m in ; if (g m in <0) g 1(x i ,y i )=temp i m g (x i ,y i )2g m in ;else g 1(x i ,y i )=0;else g 1(x i ,y i )=0;Step 3:利用新增L ap lacian 算子对图像g (x ,y )重复S tep 1和S tep 2得g 2(x ,y );步骤3:比较g 1(x ,y )和g 2(x ,y )中的每一象素点的值取大者放入g 1(x ,y ),得梯度图像g 1(x ,y );步骤4:分析梯度图像g 1(x ,y )并取阈值,得到粗略边缘图g (x ,y ).对于g 1(x ,y )中的每一点g 1(x i ,y i ),if (g 1(x i ,y i )>T 1) g (x i ,y i )=1;else if (g 1(x i ,y i )>T 2) g (x i ,y i )=2; else g (x i ,y i )=0;步骤5:对于g (x ,y )中的每一点g (x i ,y i ),if (g (x i ,y i )==2) 检查其八邻点,若存在值为1的邻点,则g (x i ,y i )=1;else g (x i ,y i )=0;(a )原图 (b )边缘图图4 实验结果步骤6:为使边缘图更清晰将图像g (x ,y )反色.至此,得4311 小 型 微 型 计 算 机 系 统 2002年到最终输出的边缘图.5 实验结果与结论在实验中,我们采用本方法对大量各类图像进行处理,并将它应用于医学影像的处理,均取得较好的效果,如图4所示.实践证明,本文介绍的边缘检测算法能准确有效地提取图像中的目标边缘.参 考 文 献1Kenneth R.Castlem an.D igital i m age p rocessing 〔M 〕.Beijing:Q inghua U niversity Publish ing House .1998,4(Kenneth R .Castlem an .D igital i m age p rocessing 〔M 〕.北京:清华大学出版社,1998.4.)2〔Japan 〕T ian Cun 2xiu 2hang .Ban tian jun xiu ,H e Rong 2w ei.T echnique fo r computer i m age p rocessing 〔M 〕.Beijing N o r m al U niversity Publish ing House ,1988.9(〔日〕田村秀行,坂田俊文.赫荣威等编译.计算机图像处理技术〔M 〕.北京:北京师范大学出版社,1988.9.)3L v Feng 2jun .P rogramm e introducti on to digital i m age p rocessing〔M 〕.Beijing:T inghua U niversity Publish ing House .1999,9(吕凤军编著.数字图像处理编程入门〔M 〕.北京:清华大学出版社,1999.9)An Enhanced M ethod for Edge D etection Ba sed on Laplac i an Opera torLV Jun 2bai(D ep a rt m en t of Co mp u ter S cience ,H uaqiao U n iversity ,Q uanz hou 362011,Ch ina )Abstract Based on analysing the L ap lacian operato r ,th is paper p ropo sed an enhanced m ethod fo r edge detecti on .Experi m ents p roved that it can no t only remove no ise ,but can also detect the edges of i m age accurately .M eanw h ile ,it can p reserve the connectedness of object edges.Key words lap lacian operato r ;edge detecti on ;gauss filter ;th resho ld53119期 吕俊白:基于L ap lacian 算子的一种新的边缘检测方法 。

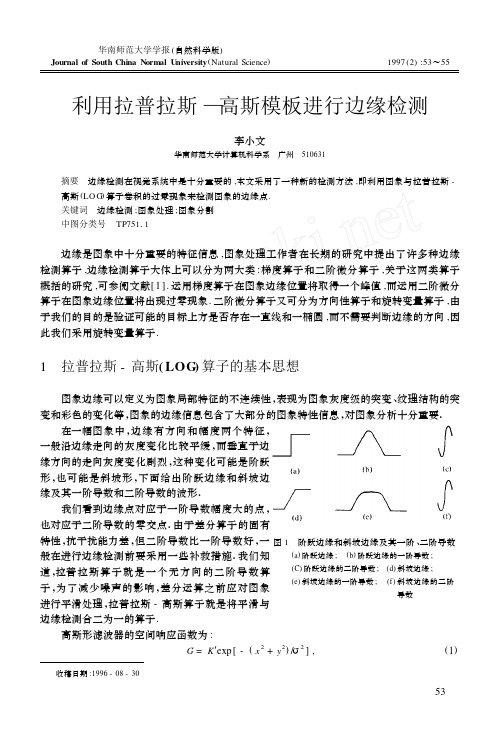
收稿日期:1996-08-30利用拉普拉斯—高斯模板进行边缘检测李小文华南师范大学计算机科学系 广州 510631摘要 边缘检测在视觉系统中是十分重要的,本文采用了一种新的检测方法,即利用图象与拉普拉斯-高斯(LO G )算子卷积的过零现象来检测图象的边缘点.关键词 边缘检测;图象处理;图象分割中图分类号 TP75111边缘是图象中十分重要的特征信息,图象处理工作者在长期的研究中提出了许多种边缘检测算子,边缘检测算子大体上可以分为两大类:梯度算子和二阶微分算子,关于这两类算子概括的研究,可参阅文献[1].运用梯度算子在图象边缘位置将取得一个峰值,而运用二阶微分算子在图象边缘位置将出现过零现象.二阶微分算子又可分为方向性算子和旋转变量算子,由于我们的目的是验证可能的目标上方是否存在一直线和一椭圆,而不需要判断边缘的方向,因此我们采用旋转变量算子.1 拉普拉斯-高斯(LOG )算子的基本思想图象边缘可以定义为图象局部特征的不连续性,表现为图象灰度级的突变、纹理结构的突变和彩色的变化等,图象的边缘信息包含了大部分的图象特性信息,对图象分析十分重要.图1 阶跃边缘和斜坡边缘及其一阶、二阶导数(a )阶跃边缘; (b )阶跃边缘的一阶导数;(C )阶跃边缘的二阶导数; (d )斜坡边缘;(e )斜坡边缘的一阶导数; (f )斜坡边缘的二阶导数在一幅图象中,边缘有方向和幅度两个特征,一般沿边缘走向的灰度变化比较平缓,而垂直于边缘方向的走向灰度变化剧烈,这种变化可能是阶跃形,也可能是斜坡形,下面给出阶跃边缘和斜坡边缘及其一阶导数和二阶导数的波形.我们看到边缘点对应于一阶导数幅度大的点,也对应于二阶导数的零交点.由于差分算子的固有特性,抗干扰能力差,但二阶导数比一阶导数好,一般在进行边缘检测前要采用一些补救措施.我们知道,拉普拉斯算子就是一个无方向的二阶导数算子,为了减少噪声的影响,差分运算之前应对图象进行平滑处理,拉普拉斯-高斯算子就是将平滑与边缘检测合二为一的算子.高斯形滤波器的空间响应函数为:G =K ′exp [-(x 2+y 2)/σ2],(1)35 华南师范大学学报(自然科学版)Journal of South China N orm al U niversity (Natural Science ) 1997(2):53~55其中,K′为常数,σ为高斯空间常数.则拉普拉斯—高斯算子 2G=92G9x2+92G9y2=-K(2-x2+y292))exp(-x2+y2292).(2)该算子的中心活动区域大约为22σ,令ω=22σ,ω称为高期函数的正瓣宽度,整个算子的宽度取3ω,或者815σ,这种近似保证了高斯函数的9917%的区域在算子中.2 2G(x,y)函数与图象I(x,y)的卷积运算2G(x,y)函数是以(0,0)为中心旋转对称的,在具体实现时,式(2)中的K值可以取大些,以使 2G(x,y)可以采用整系数卷积运算,由于 2G(x,y)具有无限拖尾,在做 2G(x, y)3I(x,y)时,应取一个N×N的空间窗,在窗内进行卷积,N的大小与主瓣宽度ω有关,不宜太小,以免过多地截去 2G(x,y)函数的拖尾.我们观察LO G算子,可以将它分解成两个滤波器h12(x,y)和h21(x,y), 2G(x,y)=h12(x,y)+h21(x,y), (3)其中,h12(x,y)=h1(x)h2(y),(4)h21(x,y)=h2(x)h1(y),(5)h1(ζ)=k(1-ζ2/σ2)exp[-ζ2/2σ2],(6)h2(ζ)=k exp[-ζ2/2σ2].(7)这样,就可以大大节省计算时间.31 边缘位置的检测从图1中可以看出,灰度变化处的二阶导数值趋近于0,图象I(x,y)与LO G算子的卷积在一个3×3的窗口里有过“0”现象,即从正到负,或从负到正现象,文献[2]、[3]介绍了边缘检测的方法:首先设计十一块检测模板,每一块模板模似了一个3×3邻域象素值的符号变化,“+”表示此象素点的LO G值为正,“-”表示此象素点的LO G值为负.所给出的十一块模板参阅文献[3].每一块模板为一个3×3的窗,从左到右、从上至下将象素点称为a,b,c,…i,模板中标出字母的位置,表示该点的值要检测,检测后如存在过“0”现象,则在该窗口的边缘位置用一个划上圈的象素点表示.4 实验结果LO G算子中的高斯空间常数σ越小,模板越小,噪声影响大,检出的边缘细节多;σ越大,噪声影响小,计算量也随之增加,同时,可能会漏掉一些重要的边缘细节.在实验过程中,我们分别选择了σ=0185、模板大小N=7,σ=111、模板大小N=9,σ=114、模板大小N=11,σ= 451165、模板大小N=13,对多幅原始图象进行了检测,通过比较,我们发现σ=114、模板大小N =11的处理效果比较好,既保持了主要的边缘信息,又有效地抑制了噪声的影响.这种方法适用于验证图象是否存在某些边缘.参考文献1 A Rosenfeld,A C Kak.Digital picture Processing.New Y ork:Academic,19761133~1702 A Huerts,G Medioni.Edge detection with subpixel put Vision,Representa2 tion and Control,1985(10):63~743 V Berzins.Accuracy of Laplacian edge put Vision,Graphics,Image Process2 ing,1984,27(2):195~210E D GE DETECTION USING LAPLACIAN-OF-G AUSSIAN MASK SLi XiaowenDept.of Computer Science,South China Normal University,Guangzhou510631,ChinaAbstract Edge detection plays an important role in the vision system.This paper presents a new method for edge detection.Edges are detected by finding zero-crossings in the convolution of the image with Laplacian-of-G aussian masks.K ey w ords edge detection;image processing;image segmentation【责任编辑 庄晓琼】55。

拉普拉斯算子边缘检测原理拉普拉斯算子是一种常见的边缘检测算法,其原理是通过对图像进行高斯平滑滤波,然后用拉普拉斯算子对其进行二阶导数操作,得到边缘信息。
拉普拉斯算子具有简单、快速、有效等特点,被广泛应用于目标检测、图像分割、边缘增强等领域。
一、拉普拉斯算子的原理1.1 高斯滤波高斯滤波是一种常见的平滑图像的操作,它对图像进行模糊处理,使得噪声被抑制,从而更易于边缘提取。
高斯滤波可以用卷积的方式来实现,其具体过程是将一个高斯核函数应用于图像的每一个像素,得到新的像素值,从而实现滤波的效果。
高斯核函数通常是一个正态分布函数,如下所示:G(x,y)=\frac{1}{2\pi\sigma^2}exp[-\frac{x^2+y^2}{2\sigma^2}]其中 \sigma^2 是高斯函数的方差,x,y 分别是高斯函数的两个自变量,exp 是自然常数 e 的指数函数。
1.2 拉普拉斯算子拉普拉斯算子是一种二阶微分算子,它可以被用来检测边缘。
拉普拉斯算子的定义如下:\Delta f=\frac{\partial^2 f}{\partial x^2}+\frac{\partial^2 f}{\partial y^2}其中 f(x,y) 是图像的灰度值,\Delta f 是二阶导数值。
在图像处理中,一般用拉普拉斯算子的离散形式来进行边缘检测:\Delta f(x,y)=f(x+1,y)+f(x-1,y)+f(x,y+1)+f(x,y-1)-4f(x,y)其中 f(x,y) 表示像素 (x,y) 的灰度值,f(x+1,y) 表示像素 (x+1,y) 的灰度值,其他同理。
二、拉普拉斯算子的应用拉普拉斯算子可以被用来检测图像中的边缘、几何形状和纹理等特征。
在应用中,一般先对图像进行高斯滤波,以去除图像中的噪声和细节,然后再用拉普拉斯算子进行边缘检测。
2.1 图像边缘检测图像边缘检测是拉普拉斯算子最常用的应用之一。
在边缘检测中,拉普拉斯算子可以被用来检测图像中的边缘信息,从而帮助分割目标区域。
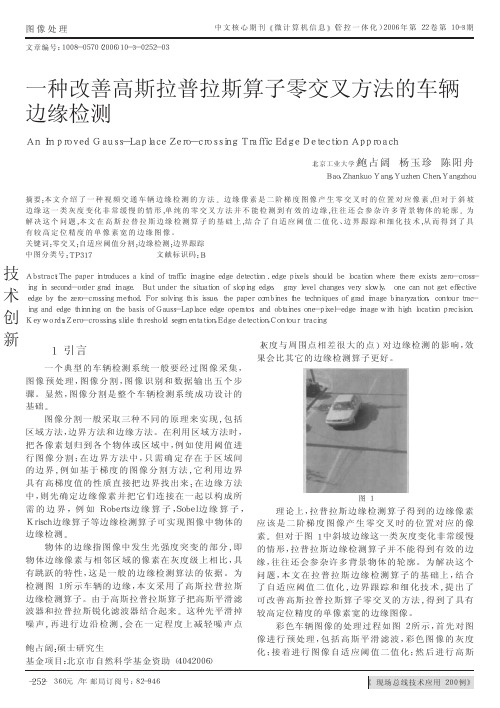
0.引言图像边缘是图像局部特征变化最显著的部分,它包含了图像的丰富的内在信息(如方向、及形状等)。
图像边缘检测是数字图像预处理和分析的一个重要的环节,图像边缘检测技术研究在数字图像处理、模式识别等领域中具有非常重要的意义。
图像边缘是图像局部特征不连续性的反映,这种不连续性包括灰度突变、颜色变化、纹理结构等。
图像的边缘表示使用了边缘的结构、边缘点的方向、模糊尺度和两边的灰度值。
边缘可以粗略地分为阶跃形边缘和屋顶形边缘两种,对于阶跃形边缘,二阶方向导数在边缘处呈零交叉;对于屋顶形边缘,二阶方向导数在边缘处取极值。
现有的图像边缘检测方法主要有微分算子法和高通滤波法。
其中最原始的差分和梯度边缘检测方法运算复杂,效果不理想。
被广泛使用的Sobel 算子、Prewitt 算子、Roberts 算子和Laplacain 算子等,由于引入了各种形式的微分运算,对噪声较为敏感[1-2]。
已提出的Log [3]和Canny [4]边缘检测算子利用高斯函数对原始图像作平滑或卷积运算,但计算量较大。
利用基于小波分析的多尺度概念模型进行边缘检测的方法[5]也已经有所应用。
本提出一种基于Laplacian 算子[6]的扩大比对范围的边缘检测算法,可以改善算子对噪声较为敏感的问题。
实验结果表明,该算法与传统算法相比,在噪声平滑和边缘检测方面都有很大的提高,可达到较好的检测效果。
1.图像边缘检测原理如果一个像素落在图像中某一个物体的边界上,那么它的邻域将成为一个灰度级变化带。
描述这种灰度级变化的数学工具是方向梯度矢量:g(x,y)=鄣f(x,y)鄣x ,鄣f(x,y)鄣y鄣鄣'(1)式中的f(x,y)为图像在(x,y)点上的灰度值,它可以等价地用梯度矢量的模值和相角来表示。
其中梯度矢量的模值:M (x,y)=‖g(x,y)‖1/2=鄣f 鄣x‖‖2+鄣f 鄣y‖‖2姨(2)梯度矢量的相角:θ(x,y)=tg -1鄣f/鄣y 鄣f/鄣x(3)边缘点的位置由梯度矢量的模值取局部极大值来确定。
经典边缘检测算子比较一各种经典边缘检测算子原理简介图像的边缘对人的视觉具有重要的意义,一般而言,当人们看一个有边缘的物体时,首先感觉到的便是边缘。
灰度或结构等信息的突变处称为边缘。
边缘是一个区域的结束,也是另一个区域的开始,利用该特征可以分割图像。
需要指出的是,检测出的边缘并不等同于实际目标的真实边缘。
由于图像数据时二维的,而实际物体是三维的,从三维到二维的投影必然会造成信息的丢失,再加上成像过程中的光照不均和噪声等因素的影响,使得有边缘的地方不一定能被检测出来,而检测出的边缘也不一定代表实际边缘。
图像的边缘有方向和幅度两个属性,沿边缘方向像素变化平缓,垂直于边缘方向像素变化剧烈。
边缘上的这种变化可以用微分算子检测出来,通常用一阶或两阶导数来检测边缘,如下图所以。
不同的是一阶导数认为最大值对应边缘位置,而二阶导数则以过零点对应边缘位置。
(a )图像灰度变化(b )一阶导数(c )二阶导数基于一阶导数的边缘检测算子包括Roberts 算子、Sobel 算子、Prewitt 算子等,在算法实现过程中,通过22⨯(Roberts 算子)或者33⨯模板作为核与图像中的每个像素点做卷积和运算,然后选取合适的阈值以提取边缘。
拉普拉斯边缘检测算子是基于二阶导数的边缘检测算子,该算子对噪声敏感。
一种改进方式是先对图像进行平滑处理,然后再应用二阶导数的边缘检测算子,其代表是LOG 算子。
前边介绍的边缘检测算子法是基于微分方法的,其依据是图像的边缘对应一阶导数的极大值点和二阶导数的过零点。
Canny 算子是另外一类边缘检测算子,它不是通过微分算子检测边缘,而是在满足一定约束条件下推导出的边缘检测最优化算子。
1 Roberts (罗伯特)边缘检测算子景物的边缘总是以图像中强度的突变形式出现的,所以景物边缘包含着大量的信息。
由于景物的边缘具有十分复杂的形态,因此,最常用的边缘检测方法是所谓的“梯度检测法”。
设(,)f x y 是图像灰度分布函数;(,)s x y 是图像边缘的梯度值;(,)x y ϕ是梯度的方向。
一种改进的自适应各向异性LOG算子关斌【摘要】针对经典各向同性高斯-拉普拉斯(LOG)算子在具有方向性差异的场合中不适用的问题,引入多尺度,多角度参量,使之能对各个方向的边缘更加有效地检测,进而提出一种自适应各向异性LOG算子.该方法由独立强度传播(DS)模型调整长轴尺度,由像素的邻域平滑度决定长短轴的比例,然后通过8邻域一阶偏导决定长轴方向.实验表明,与传统LOG算子相比,该算法很好地解决了不同方向边缘的提取,还完全保留了经典LOG算子原有的优点.【期刊名称】《科学技术与工程》【年(卷),期】2010(010)012【总页数】4页(P2992-2994,3007)【关键词】图像处理;高斯-拉普拉斯算子;边缘检测【作者】关斌【作者单位】中南民族大学电子信息工程学院,武汉,430074【正文语种】中文【中图分类】TP391.41传统的高斯-拉普拉斯算子(Laplacian of Gaussian,LOG)在边缘检测中有着广泛的应用,但由于二维高斯函数是关于中心对称的,因此 LOG算子属于各向同性算子,不能对不同方向的边缘进行更有效的检测。
为解决这个问题,不少研究者做了大量的工作,Geusebroek等提出了一种快速各向异性高斯滤波方法[1],这种滤波器通过在两个不同方向上选用不同的高斯尺度,从而使滤波器可以在去噪时较好保留图象边缘等重要信息,并利用高斯函数的可分解性将滤波器沿长轴和短轴方向分解为两个一维滤波算子与图像卷积,使计算简化,但这种滤波器的长短轴长度固定,不能自适应改变。
文献[2]提出了一种基于 LOG算子的自适应图象边缘检测方法,该方法根据各像素位置的灰度梯度值步进搜索出边缘方向,较好地模拟了人眼注视机制的工作过程,并实现了对图像边缘较好的检测。
但该方法的长短轴尺度是依据经验取值得到,不能适应图像边缘的不规律变化。
在文献[2]的基础上,本文结合王怀野等提出的由独立强度传播(Intensity—Dependent—Spread,DS)模型调整长轴尺度,由像素的邻域平滑度决定长短轴的比例的方法,提出了一种改进的自适应各向异性 LOG算子,该算法既保持了 LOG算子本身具有的优点,又增强了它的算法功能。
基于LOG 和Canny 算子的边缘检测算法贺 强,晏 立(江苏大学计算机科学与通信工程学院,江苏 镇江 212013)摘 要:针对传统Canny 算子抑制噪声和检测低强度边缘能力不足的问题,提出一种将LOG 算子和Canny 算子相结合的边缘检测方法。
采用LOG 算子对图像进行噪声过滤,从以下3个方面改进Canny 算子实现边缘检测:(1)设计高斯滤波核对过滤掉噪声的图像进行边缘增强,使低强度边缘更容易被检测;(2)在M ×N 邻域中计算梯度幅值和方向;(3)将梯度方向结合梯度幅值计算,使梯度幅值在边缘检测中更具依据性。
对增加椒盐噪声的图像进行实验,结果表明,该方法在最大程度抑制噪声的同时,能检测到更多的低强度边缘。
关键词:Canny 算子;LOG 算子;高斯滤波核;梯度核;梯度幅值Algorithm of Edge Detection Based on LOG and Canny OperatorHE Qiang, YAN Li(School of Computer Science and Communication Engineering, Jiangsu University, Zhenjiang 212013, China)【Abstract 】Aiming at the disability of traditional Canny operator in noise suppression and detecting low-intensity edge, this paper proposes an edge detection method combined LOG operator and Canny operator. LOG operator is used to the picture for noise filtering and Canny operator is improved in the flowing three aspects to execute the edge detection: (1)It designs Gaussian smoothing kernel to intense the edge of picture filtered noise, which makes the low-intensity edge detect easily; (2)Gradient magnitude and direction are calculated by pixels within a M -by-N neighborhood; (3)It integrates gradient direction with the calculation of gradient magnitude, which can be the ground for gradient magnitude in edge detection. Through carrying out a lot experiment for picture increased salt and pepper noise, the method proposed in this paper can not only suppress noise in the largest degree, but also detect more low-intensity edge.【Key words 】Canny operator; LOG operator; Gaussian smoothing kernel; gradient kernel; gradient magnitude DOI: 10.3969/j.issn.1000-3428.2011.03.074计 算 机 工 程 Computer Engineering 第37卷 第3期V ol.37 No.3 2011年2月February 2011·图形图像处理· 文章编号:1000—3428(2011)03—0210—03文献标识码:A中图分类号:TP391.411 概述边缘检测是图像处理领域中最基本的问题,它的解决对于进行高层次的特征提取、特征描述、目标识别和图像理解等有着重大的影响,因此,被广泛应用与模式识别、计算机视觉、图像分割等众多领域。
高斯一拉普拉斯边缘检测算子的扩展研究
严国萍 何俊峰
(华中科技大学电子与信息工程系,湖北武汉430074)
摘要:针对经典的高斯一拉普拉斯(LOG)边缘检测算子是各向同性的,对各个角度方向的图像边缘检测的力度是相同的特性,对经典L()G边缘检测算子引入了角度信息参量进行推导,使以圆为对称的经典的LOG边缘检测算子变成为以椭圆对称,并且可以在坐标轴旋转任意角度的边缘检测算子,增强了其边缘检测的功能,使之能对不同角度方向的边缘更加有效地进行检测.经过在Matlab里对同一幅图像进行比较实验,对于图像中不同角度的边缘均能相应地进行提取.扩展后的LOG算子,不仅增强了边缘检测算法功能,而且完全保留了经典LOG算子原有的优点.
关键词:图像处理;边缘检测;高斯一拉普拉斯算子;高斯函数
中图分类号:TP391.41 文献标识码:A 文章编号:1671-4512(2006)10-0021-03
Extended Laplacian of Gaussian operator for edge detection
Yah Guoping He Junfeng
(Department of Electronics and Information Engineering, Huazhong
University of Science and Technology, Wuhan 430074, China)
Abstract: Being an isotopic, classic Laplacian of Gaussian(LOG) edge detect operator only can detect
image edges in all directions isotopically. The parameters of angle information were introduced into
classic LOG operator for edge detection and deduced mathematically. It is symmetrical as ellipse in-
stead of circle, and can detect models in rotary angle edge by the coordinate axis. Moreover, it can ef-
fectively detect the edges in different orientations that strengthen the edge detection capability. After
comparative experiment on the same image in Matlab, it presents that edges in different angles can be
achieved. The extended LOG operators not only strengths the edge detection function, but also pre-
serves all the advantages of the former classic LOG.
Key words: image processing; edge detection; Laplacian of Gaussian (LOG) ; Gaussian function。