机械零件的接触应力计算
- 格式:doc
- 大小:93.00 KB
- 文档页数:7
间答题120题(18+17+17+18+6+9+7+16+12)=120齿轮传动(18)(6)+12= 181. 一对标准齿轮传动设计成高度变位齿轮传动, 这对轮齿的弯曲强度和接触强度有什么影响?为什么?答: 高度变位齿轮传动, 可增加小齿轮的齿根厚度, 提高其弯曲强度, 因大、小齿轮相比, 小齿轮的乘积较大、齿根弯曲应力大, 所以高度变位(小齿轮正变位、大齿轮负变位)可实现等弯曲强度, 从而提高传动的弯曲强度。
高度变位对接触强度无影响。
2. 一对大、小圆柱齿轮传动, 其传动比i =2 , 其齿面啮合处的接触应力是否相等?为什么?当两轮的材料热处理硬度均相同, 且小轮的应力循环次数N1 =106 < N0时, 则它们的许用接触应力是否相等?为什么?答: (l)接触应力相等;因从接触应力公式可知, 接触应力决定于两个齿轮的综合曲率半径、两个齿轮材料的弹性模量和接触宽度以及相互作用的法向力, 不决定于一个齿轮的几何参数。
而上述参量两个齿轮是相等的, 因此, 两个齿轮的接触应力是相等的。
(2)两个齿轮的许用接触应力是不相等的;因小齿轮的应力循环次N1 >N2, 齿轮寿命系数ZN1<ZN2, 所以小轮的许用接触应力较小。
3.齿轮传动有哪些设计理论?各针对的是哪些失效形式?答: 主要有齿面接触疲劳强度设计, 针对齿面疲劳点蚀失效;齿根弯曲疲劳强度设计, 针对疲劳折断失效形式。
此外还有抗胶合能力设计, 针对齿面胶合失效;静强度设计, 针对短期过载折断和塑性变形失效。
4. 设计一对圆柱齿轮传动时, 大、小齿轮齿宽的确定原则是什么?为什么?答: 齿轮越宽, 轮齿的承载能力越强;但齿轮的宽度过大, 将增加载荷沿齿宽分布的不均匀性。
齿轮轴支承相对齿轮对称布置时, 齿宽可选大些, 软齿面齿轮宽度也可选大些。
5. 分析齿轮产生齿面磨损的主要原因, 防止磨损失效的最有效办法是什么?答: 在齿轮传动中, 当落入磨料性物质时, 轮齿工作表面会出现磨损, 而且轮齿表面粗糙也会引起磨损失效, 它是开式齿轮传动的主要失效形式。
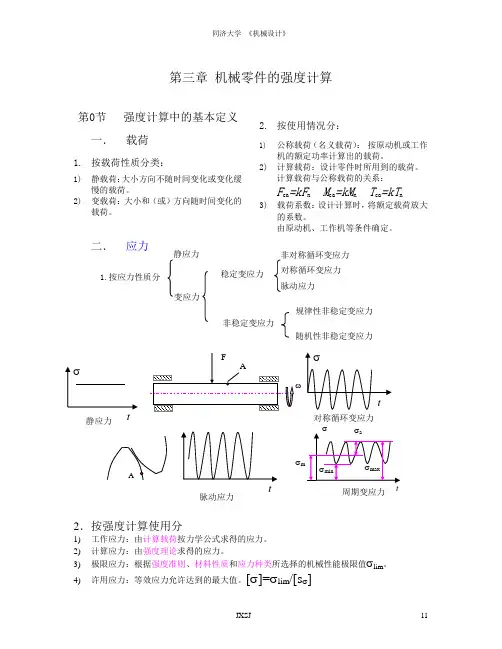
第三章 机械零件的强度计算第0节 强度计算中的基本定义 一. 载荷1. 按载荷性质分类:1) 静载荷:大小方向不随时间变化或变化缓慢的载荷。
2) 变载荷:大小和(或)方向随时间变化的载荷。
2. 按使用情况分:1)公称载荷(名义载荷): 按原动机或工作机的额定功率计算出的载荷。
2) 计算载荷:设计零件时所用到的载荷。
计算载荷与公称载荷的关系:F ca =kF n M ca =kM n T ca =kT n3) 载荷系数:设计计算时,将额定载荷放大的系数。
由原动机、工作机等条件确定。
二. 应力2.按强度计算使用分1) 工作应力:由计算载荷按力学公式求得的应力。
2) 计算应力:由强度理论求得的应力。
3) 极限应力:根据强度准则、材料性质和应力种类所选择的机械性能极限值σlim 。
4) 许用应力:等效应力允许达到的最大值。
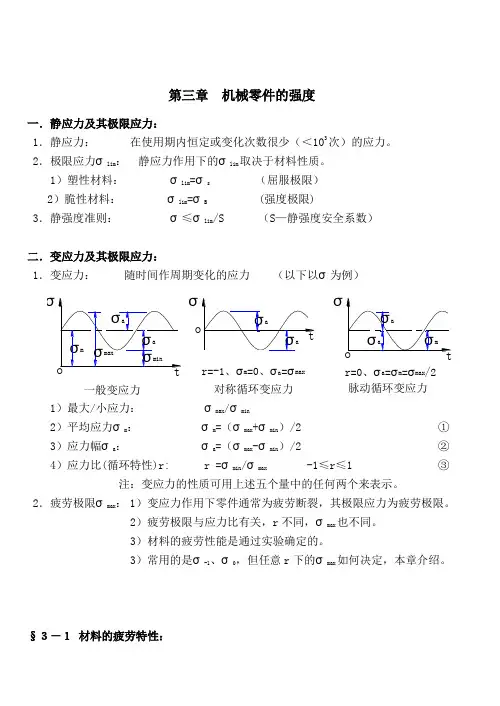
[σ]=σlim /[s σ]稳定变应力 非稳定变应力对称循环变应力脉动应力 规律性非稳定变应力随机性非稳定变应力 静应力 对称循环变应力 脉动应力σ周期变应力第1节 材料的疲劳特性一. 疲劳曲线 1. 疲劳曲线给定循环特征γ=σlim /σmax ,表示应力循 环次数N 与疲劳极限σγ的关系曲线称为疲 劳曲线(或σ-N )。
2. 疲劳曲线方程1) 方程中参数说明a) 低硬度≤350HB ,N 0=107 高硬度>350HB ,N 0=25×107b) 指数m :c) 不同γ,σ-N 不同;γ越大,σ也越大。
…二、 限应力线图1) 定义:同一材料,对于不同的循环特征进行试验,求得疲劳极限,并将其绘在σm -σa坐标系上,所得的曲线称为极限应力线图。
CN N m m N ==0γγσσr N N k mNN σσσγγ==0mNN k N 0=整理:即:其中:N 0--循环基数σγ--N 0时的疲劳极限k N --寿命系数用线性坐标表示的疲劳曲线ND2)简化曲线3)σ-N与σm-σa关系a) σ-N曲线:同一循环特征下、不同循环次数。
接触应力计算全面讨论图1 曲面体的坐标图2 坐标关系及接触椭圆1.2 接触应力两曲面接触并压紧,压力P 沿z 轴作用,在初始接触点的附近,材料发生局部的变形,靠接触点形成一个小的椭圆形平面,椭圆的长半轴a 在x 轴上,短半轴b 在y 轴上。
椭圆形接触面上各点的单位压力大小与材料的变形量有关,z 轴上的变形量大,沿z 轴将产生最大单位压力P 0。
其余各点的单位压力P 是按椭圆球规律分布的。
其方程为单位压力总压力 P 总=∫PdF∫dF 从几何意义上讲等于半椭球的体积,故接触面上的最大单位压力P 0称为接触应力σH(1)a 、b 的大小与二接触面的材料和几何形状有关。
2 两球体的接触应力半径为R1、R2的两球体相互接触时,在压力P的作用下,形成一个半径为a的圆形接触面积即a=b(图4),由赫兹公式得式中:E1、E2为两球体材料的弹性模量;μ1、μ2为两球体材料的泊松。
图4 两球体外接触取综合曲率半径为R,则若两球体的材料均为钢时,E1=E2=E,μ1=μ2=μ=0.3,则(2)如果是两球体内接触(图5),综合曲率半径为,代入式(2)计算即可求出接触应力σH。
如果是球体与平面接触,即R2=∞,则R=R1代入式(2)计算即可。
图5 两球体内接触3 轴线平行的两圆柱体相接触时的接触应力轴线平行的两圆柱体接触时,变形前二者沿一条直线接触,压受力P 后,接触处发生了弹性变形,接触线变成宽度为2b 的矩形面(图6),接触面上的单位压力按椭圆柱规律分布。
变形最大的x 轴上压力最大,以P 0表示,接触面上其余各点的压力按半椭圆规律分布,如图7,半椭圆柱的体积等于总压力P ,故图6 两圆柱体接触图7 轴线平行的两圆柱体相接触的压力分布最大单位压力(3)由赫兹公式知代入式(3),得若两圆柱体均为钢时,E1=E2=E,μ1=μ2=0.3,取则接触应力为若为两圆柱体内接触(图8),则以代入式(4)计算。
若是圆柱体与平面接触,则R2=∞,R=R1代入式(4)计算。
第三章 机械零件的强度一.静应力及其极限应力:1.静应力: 在使用期内恒定或变化次数很少(<103次)的应力。
2.极限应力σlim: 静应力作用下的σlim取决于材料性质。
1)塑性材料: σlim =σs (屈服极限)2)脆性材料: σlim=σB (强度极限)3.静强度准则: σ≤σlim/S (S —静强度安全系数)-10max§3-1 材料的疲劳特性:1.材料的疲劳特性:可用最大应力σmax、应力循环次数N和应力比r表示。
2.材料疲劳特性的确定:用实验测定,实验方法是:1)在材料标准试件上加上一定应力比的等幅变应力,应力比通常为:r=-1或r=02)记录不同最大应力σmax下试件破坏前经历的循环次数N,并绘出疲劳曲线。
3.材料的疲劳特性曲线:有二种1)σ—N疲劳曲线:即一定应力比r下最大应力σmax与应力循环次数N的关系曲线2)等寿命曲线:即一定应力循环次数N下应力幅σa 与平均应力σm的关系曲线2)C点对应的N约为:NC≈1043)这一阶段的疲劳称为应变疲劳或低周疲劳4、CD段:有限寿命疲劳阶段。
试件经历一定的循环次数N后会疲劳破坏实验表明,有限疲劳寿命σrN与相应的循环次数N之间有如下关系:σm rN ·N = C ( N ≤N D ) (3-1)5、D 点以后: 无限寿命疲劳阶段。
1)无论经历多少次应力循环都不会疲劳破坏。
2)D 点对应的循环次数N 约为:N D =106~25×107 3)D 点对应的应力记为:σr ∞—— 叫持久疲劳极限。
σrN =σr∞( N >N D ) (3-2)4)循环基数N O 和疲劳极限σrN D 很大,疲劳试验很费时,为方便起见,常用人为规定一个循环次数N O (称 为循环基数)和与之对应的疲劳极限σrNo(简记为σr )近似代替N D 和σr ∞6、有限寿命疲劳极限σrN : 按式(3-1)应有: σm rN·N = σm r ·N O = C (3-1a )于是:K N ──寿命系数m, N O ──1)钢材(材料): m = 6~20 , N O =(1~10)×106 2)中等尺寸零件: m = 9 , N O = 5×106 3)大尺寸零件: m = 9 , N O = 107 注: 高周疲劳——曲线CD 及D 点以后的疲劳称作高周疲劳二、等寿命疲劳曲线 图3-2等寿命疲劳曲线——一定循环次数下的疲劳极限的特性。
分析机械运作原理的力矩与接触应力机械运作原理是指机械在运动过程中所遵循的规律和原理。
力矩和接触应力是机械运作过程中两个非常重要的概念,它们之间存在着密切的关系。
力矩是描述力对物体产生转动效果的物理量。
它与施加力的大小和施加力的作用点距离旋转轴的距离有关。
力矩可以用公式M = F × d表示,其中M表示力矩,F表示施加的力,d表示施加力的作用点到旋转轴的距离。
可以看出,力矩的大小与施加力的大小成正比,与施加力的作用点距离旋转轴的距离成正比。
接触应力是指两个物体在接触面上产生的应力。
在机械运作中,接触应力经常存在于机械零件的接触面上。
在这些接触面上,由于受到施加在物体上的外力,导致物体表面产生应力分布。
接触应力的大小取决于施加在物体上的外力的大小、接触面的形状和材料的性质等因素。
接触应力是一个与接触面积成正比的物理量,可以用公式σ = F / A表示,其中σ表示接触应力,F表示施加在物体上的外力,A表示接触面积。
力矩和接触应力之间的关系可以通过一个简单的例子来说明。
想象一下,有一个平衡木平衡在一根支点上。
假设木板的重心位于支点左侧,并且施加的力与支点处于一条垂直线上。
在这种情况下,木板将保持平衡状态。
然而,如果施加的力方向改变为斜向上,力矩将产生旋转效果。
即使施加的力很小,只要作用点离旋转轴足够远,就可以产生足够大的力矩,使得木板产生转动。
换句话说,力矩越大,木板产生旋转的可能性就越大。
在这个例子中,我们可以看到,施加在木板上的力会通过木板与支点的接触面传递,并在接触面上产生接触应力。
如果接触面积足够大,接触应力会均匀分布在接触面上,从而保证木板与支点间的接触处不会出现过大的应力集中。
然而,如果接触面积过小,接触应力将集中在接触点上,可能导致接触点的破坏。
总的来说,力矩和接触应力是机械运作过程中两个重要的概念。
力矩描述了力对物体产生的转动效果,而接触应力描述了物体在接触面上产生的应力分布。
传递动力的高副机构,如摩擦轮、凸轮齿轮、链轮传动、滚动轴承、滚动螺旋等,都有接触强度问题,自然也涉及到接触应力。
在此对接触应力计算作较为全面的讨论。
两曲面的弹性体在压力作用下,相互接触时,都会产生接触应力,传递动力的高副机构在工作中往往出现的就是交变应力,受交变接触应力的机器零件在一定的条件下会出现疲劳点蚀的现象,点蚀扩散到一定程度,零件就不能再用了,也就就是说失效了,这样失效的形式称之为疲劳点蚀破坏,在ISO 标准中就是以赫兹应力公式为基础的。
本文较为集中地讨论了几种常见曲面的赫兹应力公式及常用机械零件的接触应力计算方法,便于此类零件的设计及强度验算。
1 任意两曲面体的接触应力1、1 坐标系图1所示为一曲面体的一部分,它在E 点与另外一曲面体相接触,E 点称为初始接触点。
取曲面在E 点的法线为z 轴,包括z 轴可以有无限多个剖切平面,每个剖切平面与曲面相交,其交线为一条平面曲线,每条平面曲线在E 点有一个曲率半径。
不同的剖切平面上的平面曲线在E 点的曲率半径一般就是不相等的。
这些曲率半径中,有一个最大与最小的曲率半径,称之为主曲率半径,分别用R′与R 表示,这两个曲率半径所在的方向,数学上可以证明就是相互垂直的。
平面曲线AEB 所在的平面为yz 平面,由此得出坐标轴x 与y 的位置。
任何相接触的曲面都可以用这种方法来确定坐标系。
由于z 轴就是法线方向,所以两曲面在E 点接触时,z 轴就是相互重合的,而x 1与x 2之间、y 1与y 2之间的夹角用Φ表示(图2所示)。
图1 曲面体的坐标图2 坐标关系及接触椭圆1、2 接触应力两曲面接触并压紧,压力P沿z轴作用,在初始接触点的附近,材料发生局部的变形,靠接触点形成一个小的椭圆形平面,椭圆的长半轴a在x轴上,短半轴b在y轴上。
椭圆形接触面上各点的单位压力大小与材料的变形量有关,z轴上的变形量大,沿z轴将产生最大单位压力P0。
其余各点的单位压力P就是按椭圆球规律分布的。
机械零件的接触应力计算
摘要:传递动力的高副机构,如摩擦轮、凸轮齿轮、链轮传动、滚动轴承、滚动螺旋等,都有接触强度问题,自然也涉及到接触应力。
在此对接触应力计算作较为全面的讨论。
关键词:接触应力赫兹应力公式高副
两曲面的弹性体在压力作用下,相互接触时,都会产生接触应力,传递动力的高副机构在工作中往往出现的是交变应力,受交变接触应力的机器零件在一定的条件下会出现疲劳点蚀的现象,点蚀扩散到一定程度,零件就不能再用了,也就是说失效了,这样失效的形式称之为疲劳点蚀破坏,在ISO标准中是以赫兹应力公式为基础的。
本文较为集中地讨论了几种常见曲面的赫兹应力公式及常用机械零件的接触应力计算方法,便于此类零件的设计及强度验算。
1 任意两曲面体的接触应力
1.1 坐标系
图1所示为一曲面体的一部分,它在E点与另外一曲面体相接触,E点称为初始接触点。
取曲面在E点的法线为z轴,包括z轴可以有无限多个剖切平面,每个剖切平面与曲面相交,其交线为一条平面曲线,每条平面曲线在E点有一个曲率半径。
不同的剖切平面上的平面曲线在E 点的曲率半径一般是不相等的。
这些曲率半径中,有一个最大和最小的曲率半径,称之为主曲率半径,分别用R′和R表示,这两个曲率半径所在的方向,数学上可以证明是相互垂直的。
平面曲线AEB所在的平面为yz平面,由此得出坐标轴x和y的位置。
任何相接触的曲面都可以用这种方法来确定坐标系。
由于z轴是法线方向,所以两曲面在E点接触时,z轴是相互重合的,而x1和x2之间、y1和y2之间的夹角用Φ表示(图2所示)。
图1 曲面体的坐标图2 坐标关系及接触椭圆
1.2 接触应力
两曲面接触并压紧,压力P沿z轴作用,在初始接触点的附近,材料发生局部的变形,靠接触点形成一个小的椭圆形平面,椭圆的长半轴a在x轴上,短半轴b在y轴上。
椭圆形接触面上各点的单位压力大小与材料的变形量有关,z轴上的变形量大,沿z轴将产生最大单位压力P0。
其余各点的单位压力P是按椭圆球规律分布的。
其方程为
单位压力
总压力P总=∫PdF
∫dF从几何意义上讲等于半椭球的体积,故
接触面上的最大单位压力P0称为接触应力σH
(1)
a、b的大小与二接触面的材料和几何形状有关。
2 两球体的接触应力
半径为R1、R2的两球体相互接触时,在压力P的作用下,形成一个半径为a的圆形接触面积即a=b(图4),由赫兹公式得
式中:E1、E2为两球体材料的弹性模量;μ1、μ2为两球体材料的泊松。
图4 两球体外接触
取综合曲率半径为R,则
若两球体的材料均为钢时,E1=E2=E,μ1=μ2=μ=0.3,则
(2)
如果是两球体内接触(图5),综合曲率半径为,代入式(2)计算即可求出接触应力σH。
如果是球体与平面接触,即R2=∞,则R=R1代入式(2)计算即可。
图5 两球体内接触
3 轴线平行的两圆柱体相接触时的接触应力
轴线平行的两圆柱体接触时,变形前二者沿一条直线接触,压受力P后,接触处发生了弹性变形,接触线变成宽度为2b的矩形面(图6),接触面上的单位压力按椭圆柱规律分布。
变形最大的x轴上压力最大,以P0表示,接触面上其余各点的压力按半椭圆规律分布,如图7,
半椭圆柱的体积等于总压力P ,故
图6 两圆柱体接触图7 轴线平行的两圆柱体相接触的压力
分布
最大单位压力
(3)
由赫兹公式知
代入式(3),得
若两圆柱体均为钢时,E1=E2=E,μ1=μ2=0.3,取则接触应力为
若为两圆柱体内接触(图8),则以代入式(4)计算。
若是圆柱体与平面接触,则R2=∞,R=R1代入式(4)计算。
4 机械零件的接触应力计算
4.1 摩擦轮传动
金属摩擦轮传动失效的主要形式是滚动体表面的疲劳点蚀,常按接触疲劳强度设计,来验算
滚动体接触表面上的接触应力。
对于圆盘与摩擦轮的传动(图9),将滚动体的压紧力代入赫兹应力公式,可得
图8 两圆柱体内接触图9 圆盘与摩擦轮接触
式中:T为摩擦轮轴上转矩;f为摩擦系数;b为接触长度;S为摩擦力裕度,在动力传动中取1.25~1.5,在仪器传动中取不大于3。
4.2 齿轮传动
一对齿轮在节点外接触,相当于半径为ρ1、ρ2的两个圆柱体相接触(图10),因此也用式(4)来求接触应力
图10 一对齿轮在节点处接触的接触应力
代入式(4),便可得出轮齿表面的接触应力公式,进而导出齿轮传动接触强度的设计计算式。
4.3 凸轮机构
凸轮机械中滚子与凸轮工作面也存在着接触应力,也可以用式(4)进行校核
式中:q=P/L,P为凸轮与推杆间在所校核的接触处的法向压力,常见的直动滚子推杆盘形凸轮机构法向压力如图11所示。
式中:Q为推杆上的载荷;α为压力角;f为导槽与推杆间摩擦系数;L a为推杆上滚子中心伸出导槽的长度。
4.4 滚柱式离合器(图12)
当离合器进入接合状态时,滚柱被楔紧在星轮和套筒间,靠套筒随星轮一同回转。
图11 凸轮机构的受力图12 滚柱式定向离合器
简图
星轮工作面的坐标为作用在滚柱的力对离合器轴心的力臂为若传递的传矩为M k时,作用在滚柱上的力为
滚柱和星轮的接触是圆柱体和平面相接触,所以综合曲率半径单位长度的载荷q=Q/L,代入式(4)即可得出滚柱和星轮间的接触应力公式
式中:L为滚柱长度;d为滚柱直径。
4.5 滚动轴承的滚动体与滚道间的接触应力
滚子轴承的滚子与内环的接触相当于两圆柱体外接触(图13),综合曲率半径
单位长度上的载荷代入式(4),便可得出受力最大的滚子与内环接触处的接触应力
式中:P为受力最大的滚子所承受的力;L为滚子工作长度。
图13
5 结语
(1)通过对曲面间高副接触应力的分析,对赫兹公式进一步作了改进,得到了4个接触应力计算公式。
(2)有些机械零件,如上述讨论的齿轮,摩擦轮、滚动轴承等都是工作在高的接触压力作用下,经过多次接触应力循环下,局部表面将发生小片或小块金属剥落,形成麻点或凹坑,使零件工作时噪音增大,振动加剧。
本文对以上这类零件的接触应力都给出了具体的计算公式。