实用模板剥豆机机构脱皮机构设计
- 格式:doc
- 大小:2.15 MB
- 文档页数:20
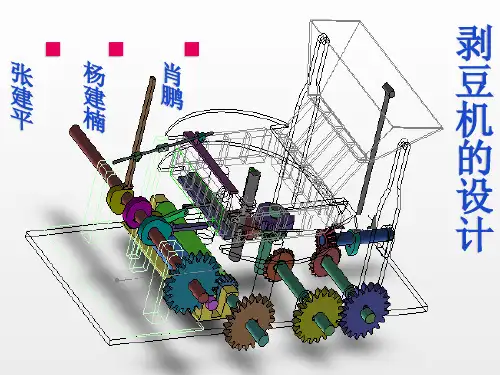
机械原理课程设计剥豆机随着农村人口结构的变化,越来越多的年轻人走出家乡进入城市工作,而老年人和留守儿童则成为了农村留守人员的主要代表,他们需要进行自给自足的生产。
为了满足留守人员豆类加工的需求,我校机械工程学院的学生通过机械原理课程设计,设计了一款剥豆机。
一、剥豆机的设计1.1 设计原理剥豆机是一种基于机械原理的设备,通过齿轮传动、凸轮机构和运动基础构造等原理,将带壳豆子与壳分离。
1.2 设计要求剥豆机的设计需要满足以下三个条件:1. 速度:剥豆机的剥豆速度需要快,能够适应高质量大量加工的需要。
2. 清洁:剥豆机的设计要求其操作简单,清洁方便。
3. 安全性:剥豆机的设计必须符合安全标准,防止操作人员受伤。
1.3 设计方案为了实现设计要求,设计者们采用了使用电机带动轴、轴带动刀头,利用凸轮机构驱动滑板实现壳与豆的分离的方案。
同时,我们还采用四层筛网的设计,以分离不同大小的豆子,确保剥豆过程的精度和效率。
二、设计的实现2.1 设计材料和方法剥豆机的主要材料是选用了一些防腐料,如不锈钢、塑料、橡胶和铁质材料。
主要的技术方法涉及车床加工、切割和焊接等。
2.2 设计结果剥豆机的设计经过反复的试验和改进后,达到了预期的效果。
设计者们制作的剥豆机在使用时不仅能够快速剥豆,还具有操作方便、清洗方便和安全可靠的特点。
三、结论和展望在机械原理课程设计的完成过程中,设计者们展现了出色的创造力和才华。
通过不断的实验和改进,我们理解了机械原理中的许多基本概念,掌握了机械原理的设计原则和相关术语,同时也积累了实践操作的经验。
随着人工智能技术的发展和人们对质量和效率的要求的提高,剥豆机的应用和发展前景广大。
未来,我们计划在现有剥豆机的基础上,进一步优化结构,提高生产效率和剥豆的精度,为农村留守人员带来更多的便利。
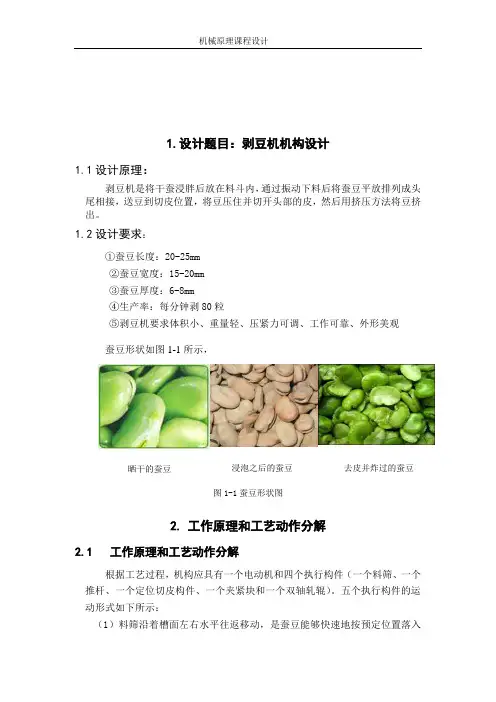
1.设计题目:剥豆机机构设计1.1设计原理:剥豆机是将干蚕浸胖后放在料斗内,通过振动下料后将蚕豆平放排列成头尾相接,送豆到切皮位置,将豆压住并切开头部的皮,然后用挤压方法将豆挤出。
1.2设计要求:①蚕豆长度:20-25mm②蚕豆宽度:15-20mm③蚕豆厚度:6-8mm④生产率:每分钟剥80粒⑤剥豆机要求体积小、重量轻、压紧力可调、工作可靠、外形美观蚕豆形状如图1-1所示,图1-1蚕豆形状图2. 工作原理和工艺动作分解2.1 工作原理和工艺动作分解根据工艺过程,机构应具有一个电动机和四个执行构件(一个料筛、一个推杆、一个定位切皮构件、一个夹紧块和一个双轴轧辊)。
五个执行构件的运动形式如下所示:(1)料筛沿着槽面左右水平往返移动,是蚕豆能够快速地按预定位置落入槽内。
因为蚕豆颗粒相对比较大,若没有振动这一过程,蚕豆容易卡在料筛的出豆口,将不能达到预期目的。
我们采用的是使蚕豆一粒一粒的落下,所以为了提高工作效率和降低能耗,料筛振动的幅度不宜过大。
故其行程约为30mm 其简图和位移线图如图2-1所示:(2)推杆沿着槽的内部首先将蚕豆水平推进24mm ,然后停止一段时间,等切皮结束后在往前推52mm,到达斜槽顶部是蚕豆下滑。
若机构完成一个运动循环则其简图和位移线图如图2-2所示:(3)定位切皮机构是有凸轮机构来实现其运动规律的。
它的目的是将蚕豆定位,并且定位于切皮是一个联动组合机构,在回位的同时进行切皮动作其运动简图和位移线图如图2-3示:图2-1振动筛的位移示意图(4)夹紧块也是通过凸轮机构来实现其运动规律的。
它是将蚕豆固定,利于下一步的切皮运动。
其运动简图和位移线图如图2-4所示:(5)双轴轧辊是用来实现脱皮功能的。
由于它的与其它机构的联动性要求不高,而且是匀速转动的,所以对其设计只需着眼于对其功能的实现。
3.根据工艺动作和协调要求拟定运动循环图拟定运动循环图的目的是确定各机构执行构件动作的先后顺序、相位,以利于设计、装配和调试。
目录一,设计原理---------------------------------4二,设计要求---------------------------------4 三,工作原理和工艺动作分解-------------------4 四,根据工艺动作和协调要求拟定运动循环图-----6五,剥豆机的功能分析与设计过程---------------7 1,剥豆机的功能分析2,剥豆机的设计过程六,机构对比选型-----------------------------8 1,下料机构选型2,切皮机构选型3,送料机构选型七,机构相关计算----------------------------12 八,脱皮机构的尺寸设计----------------------13九,参考文献--------------------------------14 十,设计总结--------------------------------15一,设计原理剥豆机是将干蚕豆浸胖后放入料斗内,通过振动下料后将蚕豆平放排列成头尾相接,送豆到切皮位置,将豆压住并切开头部的皮,然后用挤压方法将豆挤出。
二,设计要求1,蚕豆长度:20—25mm2,蚕豆宽度:15—20mm3,蚕豆厚度:6—8mm4,生产率:每分钟剥80粒5,剥豆机要求体积小、重量轻、压紧力可调、工作可靠、外形美观蚕豆形状:蚕豆浸胖后的蚕豆三,工作原理和工艺动作分解根据工艺过程,机构应具有一个电动机和四个执行机构(一个料斗,一个推杆,一个定位切皮机构,一个双轴轧辊),在本次设计中,没有采用传统的定位切皮机构,而是将切皮机构安装在出料口,同时用传送带传送代替了推杆。
执行机构的运动形式如下所示:(1)因为蚕豆颗粒相对比较大,若没有振动这一过程,蚕豆容易卡在料斗的出豆口,将不能达到预期目的。
所以料斗采用振动料斗,通过振动将蚕豆排列整齐,首尾相接依次进入槽内。
我采用的是使蚕豆一粒一粒的落下,为了提高工作效率和降低能耗,料斗振动的幅度不宜过大。
湖南工业大学课程设计任务书2010 —2011 学年第2 学期机械工程学院(系、部)材料成型专业材料083 班级课程名称:机械原理课程设计设计题目:剥豆机机构设计完成期限:自2009 年 6 月 5 日至2009 年 6 月9 日共 1 周指导教师:银金光2009 年6 月1 日湖南工业大学课程设计资料袋机械工程学院(系、部)第二学年第二学期课程名称机械原理课程设计指导教师职称学生姓名黄子良专业班级材料072 学号 07405300219题目剥豆机机构设计成绩起止日期 2009 年 5 月 22 日~ 2009 年 5 月 29 日目录清单机械原理课程设计设计说明书剥豆机机构设计起止日期: 2009 年 6 月 5 日至 2009 年 6 月 9 日学生姓名黄子良班级材料072学号07405300219成绩指导教师(签字)机械工程学院(部)2009年 6月9 日目录1.设计题目 (1)2.工作原理和工艺动作分解 (3)3.根据工艺动作和协调要求拟定运动循环图 (5)4.豆机的功能分析与设计过程 (6)5.脱皮机构与定位夹紧机构选型 (8)6.机械传动系统的速比和变速机构 (11)7.脱皮机构的尺度设计 (12)8.定位切皮凸轮机构及夹紧凸轮机构设计 (13)9.剥豆机三维图设计 (16)10.参考资料 (17)11.设计总结 (18)1.设计题目:剥豆机机构设计1.1设计原理:剥豆机是将干蚕浸胖后放在料斗内,通过振动下料后将蚕豆平放排列成头尾相接,送豆到切皮位置,将豆压住并切开头部的皮,然后用挤压方法将豆挤出。
1.2设计要求:①蚕豆长度:20-25mm②蚕豆宽度:15-20mm③蚕豆厚度:6-8mm④生产率:每分钟剥80粒⑤剥豆机要求体积小、重量轻、压紧力可调、工作可靠、外形美观蚕豆形状如图1-1所示,晒干的蚕豆浸泡之后的蚕豆去皮并炸过的蚕豆图1-1蚕豆形状图2. 工作原理和工艺动作分解2.1 工作原理和工艺动作分解根据工艺过程,机构应具有一个电动机和四个执行构件(一个料筛、一个推杆、一个定位切皮构件、一个夹紧块和一个双轴轧辊)。
剥豆机机构脱皮机构设计一、引言豆类是人们日常生活中常见的食物,种类繁多,如黄豆、红豆、绿豆等。
豆类中含有丰富的蛋白质、维生素和矿物质等营养成分,是人们健康饮食的重要组成部分。
然而,豆类在生长过程中会形成坚硬的外壳,不仅影响口感,还可能降低营养价值。
为了解决这一问题,人们设计了剥豆机机构脱皮机构,用于去除豆类的外壳,提高食用的便利性。
本文将从机构原理、传动方式、结构设计等方面进行详细阐述。
二、机构原理剥豆机机构脱皮机构是通过机械力将豆类的外壳和内部分离,实现豆类的脱皮。
其基本原理是借助摩擦力和撞击力,将豆类与外壳分离。
具体来说,机构通过设定一定的运动轨迹和速度,使得豆类在摩擦力的作用下与外壳相互碰撞,从而达到脱皮的效果。
为了提高脱皮的效率,可以加入一定的振动装置,增加撞击力,使得豆类与外壳的接触更加紧密,从而更容易脱皮。
三、传动方式剥豆机机构脱皮机构一般采用电动传动方式。
电动传动具有结构简单、移动方便等优点,适用于小型家用剥豆机。
电动机通过轴和带轮等传动装置将动力传递给脱皮机构,驱动豆类的脱皮过程。
此外,电动传动还可以根据需要进行速度调整,以满足不同种类豆类的脱皮需求。
四、结构设计1.外壳:剥豆机机构脱皮机构的外壳一般采用金属材料制作,以提高机器的强度和耐用性。
外壳的设计应保证机器内部工作的稳定性和安全性。
2.摩擦装置:摩擦装置是剥豆机机构脱皮机构的核心组成部分,用于实现豆类与外壳的摩擦和脱皮。
常见的摩擦装置有摩擦轮和摩擦板两种形式。
摩擦轮通常采用金属材料制作,通过电动机的驱动使其高速旋转,与豆类进行摩擦,实现脱皮。
摩擦板则通过调整角度和位置,与豆类进行摩擦,使豆类与外壳分离。
3.振动装置:为了提高豆类与外壳的撞击力,剥豆机机构脱皮机构中还可以加入振动装置。
振动装置通过电动机的驱动产生振动,使得豆类与外壳的接触更加紧密,更容易实现脱皮效果。
4.控制系统:剥豆机机构脱皮机构中的控制系统主要由电动机、传感器和控制器组成。
机械原理课程设计剥豆机的设计一、设计题目:设计一个自动剥豆机,实现快速、高效、卫生的豆子剥离。
二、设计要求:1.能够自动进料,且进料速度可调;2.能够将豆子从豆荚中完整剥离;3.剥离后的豆子应无破损、无杂质;4.需考虑机器的耐用性和易维护性;5.兼顾生产成本和操作简便性。
三、设计概述:根据以上要求,我们设计了一种基于振动和冲击原理的自动剥豆机。
该机器主要由进料装置、剥离装置和收集装置组成。
进料装置通过振动筛实现豆荚和豆子的分离,剥离装置通过冲击杆将豆子从豆荚中击出,收集装置将剥离后的豆子进行收集。
四、主要部件及功能:1.进料装置:进料装置由振动筛和送料装置组成。
振动筛通过振动实现豆荚和豆子的初步分离,送料装置将豆荚和豆子送入剥离装置。
2.剥离装置:剥离装置由冲击杆、冲击砧和调整机构组成。
冲击杆在冲击砧的配合下,通过调整机构调整冲击力度,将豆子从豆荚中击出。
为防止豆子破损,冲击杆和冲击砧的形状和材质需特别选择。
3.收集装置:收集装置由收集槽和传送带组成。
剥离后的豆子通过传送带被送入收集槽,再通过输送带将收集到的豆子送出机器。
五、设计特点:1.通过振动筛和冲击杆的结合,实现了豆荚的有效分离和完整豆子的剥离;2.冲击杆和冲击砧的形状和材质经过优化设计,既保证了豆子的完整性,又提高了剥离效率;3.通过调整冲击力度,可以适应不同种类的豆子和豆荚;4.机器结构紧凑,操作简单,维护方便,生产成本较低。
六、工作原理:1.开机前,先检查机器各部位是否正常,特别是冲击杆和冲击砧是否牢固安装;2.开启进料装置,将待剥豆荚送入振动筛,豆荚和豆子通过振动筛进行初步分离;3.分离后的豆荚和豆子分别进入冲击装置和收集装置;4.冲击杆在冲击砧的撞击下,将豆子从豆荚中击出,落入收集装置;5.收集装置将剥离后的豆子送出机器,完成整个剥离过程。
七、结论:本设计通过振动和冲击原理实现了自动剥豆的功能,具有高效、卫生的特点。
在设计中,充分考虑了机器的耐用性和易维护性,以及生产成本和操作简便性。
剥豆机压紧切皮机构的尺度设计、剥豆机压紧切皮机构的尺度设计1)齿轮传动的计算切皮加压机构与挤豆机构同步进行,齿轮要求一样,取Z1=16,Z2=i×16=5×16=80。
按钢质齿轮进行强度计算,其模数m=2mm。
则d1=z1×m=32mmd2=z2×m=160mm2)变位齿轮的计算为了满足机构的同步,所以变位齿轮1、2的基本参数相同,所以有:变位系数x1=-x2=0.186节园直径d1’=d1=Z4m=213mmd2’=d2=Z5m=748mm啮合角α’=α=20o齿顶高h a1=(h a*+x1)mh=18.822mmH a2=(h a*+x2)mh=12.184mm齿根高h f1=(h a*+ c*-x1)mh=16.158mmH f2=(h a*+ c*-x2)mh=21.723mm齿顶圆直径d a1= d 1+2 dh a1=251.523mmd a2= d 2+2 dh a2=809.377mm齿根圆直径d f1= d 1-2 h f1=189.623mmd f2= d 2-2 h f2=729.368mm中心距a=(d1+d2)/2=514mm中心距变动系数y=0齿顶高降低系数△y=03)曲柄滑块的计算切皮动作由曲柄滑块机构控制,其示意图如图所示:依据滑块的行程要求以及压切机构的尺寸要求,选取此机构的尺寸如下:根据蚕豆的尺寸,可定其偏距为e=m,柄L1=30mm,连杆L2=100mm。
根据以上数据设计,计算出滑块的行程为S=60mm,满足要求行程速比K=1.0015最小传动角γmin=67.67曲柄转速为80r/min,ω=480rad/s。
其位移、速度线图如下:230? 切皮的过程曲柄转动的角度为110?3)凸轮的计算为了计算方便,采用偏心距为零的机构,根据压头的运动要求取基圆半径为r=60,运动行程为h=35mm 。
由于要与切皮的曲柄滑块机构配合,ω=480rad/s ,凸轮的远休止角为δ。
目录1设计题目 (1)1.1设计题目:剥豆机 (1)1.2原始数据及设计要求 (1)1.3设计任务 (1)2、运动方案设计 (2)2.1工作原理和工艺动作分解 (2)2.2机械执行机构的选择和评定 (2)2.2.1间歇送料 (2)2.2.2压豆切皮 (4)2.3根据工艺动作和协调要求拟定运动循环图 (8)2.4机械传动系统的设计选择和评定 (8)2.4.2 V带传动 (9)2.5 传动系统的确定 (9)2.5.1 工作机外部传动系统的确定 (9)2.5.2 选择电动机 (10)2.5.3 计算传动装置总传动比和分配各级传动比 (10)2.5.4 计算传动装置的运动和动力参数 (11)3执行机构尺寸设计 (12)3.1执行机构各部分尺寸设计 (12)3.1.1凸轮设计 (12)3.1.2不完全齿轮的设计 (14)3.1.3不完全齿轮形状的设计 (14)3.1.4不完全齿轮尺寸的设计 (14)3.1.5料斗形状和尺寸的设计 (14)3.2机构运动简图 (15)4参考文献 (16)5设计总结 (17)1设计题目1.1设计题目:剥豆机1.2原始数据及设计要求1)蚕豆长度:20~25mm2)蚕豆宽度:15~20mm3)蚕豆厚度:6~8mm4)生产率:每分钟剥80粒。
5)要求体积小、重量轻、压紧力可调、工作可靠、外形美观。
1.3设计任务1)本题设计的时间为2周;2)根据功能要求,确定工作原理和工艺动作分解;3)执行机构选型与设计:构思出至少3种运动方案,并在说明书中画出运动方案草图,经对所有运动方案进行分析比较后,选择其中你认为比较好的方案进行详细设计;4)对选择的方案画出机构运动循环图;5)机械传动系统的设计;6)对选择的方案执行机构进行尺寸设计;7)在2或3号图纸上画出最终方案的机构运动简图;8)编写设计说明书,附源程序和计算结果。
2、运动方案设计2.1工作原理和工艺动作分解将干蚕豆浸胖后放在料斗内,通过振动下料后将蚕豆平放排列成头尾相接,送豆到切皮位置,将豆压住并切开头部的皮,然后用挤压方法将豆挤出。
毛豆剥壳机的机构设计
蔡耿健;管珣;李佳玲;陈亦开
【期刊名称】《江苏农机化》
【年(卷),期】2015(0)4
【摘要】在结合现有技术的基础上,按照剥豆机功能多样化和使用经济性要求,设计开发一种能够同时剥青老毛豆的方便实用的剥豆机。
【总页数】3页(P24-26)
【作者】蔡耿健;管珣;李佳玲;陈亦开
【作者单位】湖州师范学院;湖州师范学院;湖州师范学院;湖州师范学院
【正文语种】中文
【相关文献】
1.粗纺梳毛机斩刀剥取改罗拉剥取的实践 [J], 纪合聚;李宗成;郭瑞勇
2.梳毛机锡林,工作辊和剥毛辊部位气流作用探讨 [J], 谭新丰;王文光
3.手剥山核桃破壳机的设计与试验 [J], 洪翎;曹成茂;毕如俊;朱德泉;李兵
4.手剥山核桃破壳机的设计与研究 [J], 曹成茂;朱德泉;江家伍;李兵;江庆
5.粗纺梳毛机反向剥取机理分析 [J], 罗湘君
因版权原因,仅展示原文概要,查看原文内容请购买。
工业大学课程设计资料袋机械工程学院(系、部)第二学年第二学期课程名称机械原理课程设计指导教师职称学生专业班级学号题目剥豆机机构设计成绩起止日期目录清单机械原理课程设计设计说明书剥豆机机构设计起止日期: 2009 年 6 月 5 日至 2009 年 6 月 9 日学生班级学号成绩指导教师(签字)机械工程学院(部)2009年 6月9 日目录0.课程设计任务书 (2)1.设计题目 (3)2.工作原理和工艺动作分解 (3)3.根据工艺动作和协调要求拟定运动循环图 (5)4.豆机的功能分析与设计过程 (6)5.脱皮机构与定位夹紧机构选型 (8)6.机械传动系统的速比和变速机构 (11)7.脱皮机构的尺度设计 (12)8.定位切皮凸轮机构及夹紧凸轮机构设计 (13)9.剥豆机三维图设计 (16)10.参考资料 (17)11.设计总结 (18)工业大学课程设计任务书2010 —2011 学年第2 学期机械工程学院(系、部)材料成型专业材1 班级课程名称:机械原理课程设计设计题目:剥豆机机构设计完成期限:自2009 年 6 月 5 日至2009 年 6 月9 日共 1 周指导教师:银金光2009 年6 月1 日系(教研室)主任:王菊槐2009 年6 月 1 日1.设计题目:剥豆机机构设计1.1设计原理:剥豆机是将干蚕浸胖后放在料斗,通过振动下料后将蚕豆平放排列成头尾相接,送豆到切皮位置,将豆压住并切开头部的皮,然后用挤压方法将豆挤出。
1.2设计要求:①蚕豆长度:20-25mm②蚕豆宽度:15-20mm③蚕豆厚度:6-8mm④生产率:每分钟剥80粒⑤剥豆机要求体积小、重量轻、压紧力可调、工作可靠、外形美观蚕豆形状如图1-1所示,晒干的蚕豆浸泡之后的蚕豆去皮并炸过的蚕豆图1-1蚕豆形状图2. 工作原理和工艺动作分解2.1 工作原理和工艺动作分解根据工艺过程,机构应具有一个电动机和四个执行构件(一个料筛、一个推杆、一个定位切皮构件、一个夹紧块和一个双轴轧辊)。
五个执行构件的运动形式如下所示:(1)料筛沿着槽面左右水平往返移动,是蚕豆能够快速地按预定位置落入槽。
因为蚕豆颗粒相对比较大,若没有振动这一过程,蚕豆容易卡在料筛的出豆口,将不能达到预期目的。
我们采用的是使蚕豆一粒一粒的落下,所以为了提高工作效率和降低能耗,料筛振动的幅度不宜过大。
故其行程约为30mm其简图和位移线图如图2-1所示:图2-1振动筛的位移示意图(2)推杆沿着槽的部首先将蚕豆水平推进24mm,然后停止一段时间,等切皮结束后在往前推52mm,到达斜槽顶部是蚕豆下滑。
若机构完成一个运动循环则其简图和位移线图如图2-2所示:图2-2推杆位移图(3)定位切皮机构是有凸轮机构来实现其运动规律的。
它的目的是将蚕豆定位,并且定位于切皮是一个联动组合机构,在回位的同时进行切皮动作其运动简图和位移线图如图2-3示:图2-3定位切皮机构位移图(4)夹紧块也是通过凸轮机构来实现其运动规律的。
它是将蚕豆固定,利于下一步的切皮运动。
其运动简图和位移线图如图2-4所示:图2-4夹紧机构位移图(5)双轴轧辊是用来实现脱皮功能的。
由于它的与其它机构的联动性要求不高,而且是匀速转动的,所以对其设计只需着眼于对其功能的实现。
3.根据工艺动作和协调要求拟定运动循环图拟定运动循环图的目的是确定各机构执行构件动作的先后顺序、相位,以利于设计、装配和调试。
以主动件的转角作为横坐标(0°、360°),以各机构执行构件的位移为纵坐标作出位移曲线。
主动轴每转一圈为其准拟定的运动循环图如下图3-1所示:图3-1剥豆机的机构运动循环图4.剥豆机的功能分析与设计过程4.1剥豆机的功能分析由上述分析可知,剥豆机的功能分析可作总结如图4-1所示:图4-1剥豆机的功能分析图将剥豆机的功能分析图可知,其运动有下料送料定位压紧切皮脱皮,如图4-2所示:图4-2 剥豆机功能示意图剥豆机功能分解振动料筛使蚕豆掉入预定位置推杆将蚕豆推出的同时封住下料口将蚕豆定位夹紧,再切皮此时推杆间歇轧辊对蚕豆进行脱皮并进行清扫推杆继续推出蚕豆至斜槽下料送料定位压紧切皮脱皮4.2剥豆机的设计过程:实现剥豆机切皮运动的机构应有下面几种基本功能:(下料与输送由小娟负责)①在蚕豆输送过程中,此时定位机构要处于停歇状态,在蚕豆即将被定位时,定位机构也要处于停歇状态,故该机构要有两次间歇功能。
②要满足定位功能与切皮功能联动组合②需要定位切皮机构有往复运动③双轴轧辊转向所在的平面于主动件即主动轴转动所在的平面是垂直的,故机构要有运动转动换向功能,即垂直平面换向④根轧辊间的运动要反向,所以该机构必须要有第二次运动换向功能,即同平面反向⑤辊脱皮的过程中,因为蚕豆的壳比较软很容易粘在轧辊上,故此机构应该有个扫的功能⑥我们设计的剥豆机的生产效率是每分钟剥80粒,并且没脱一粒皮双轴轧辊就应该旋转一周,故主动轴轧辊的要完成每分钟转80圈5.脱皮机构与定位夹紧机构选型5.1脱皮机构选型实现夹紧运动的机构应有下面几种基本功能:①在定位前,夹紧块要处于未夹紧停歇状态,定位之后,夹紧块也要处于夹紧的停歇状态,以利于下一步的切皮动作,故该机构也要有两次停歇功能。
②需要加紧机构要有往复运动。
由上述易知要实现蚕豆脱皮的功能需要将此两种换向的机构串联起来,因此可以先去能使现(1)、(2)两种功能的的机构来组成我们所需要的方案。
如果每一功能仅由一类基本机构来实现,如图5-1所示,可以组合成3*3=9种方案。
垂直平面换向平行平面换向在按给定所需要的运动条件和空间,时间条件下,选出三种方案。
如图5-2所示:图5-2脱皮机构的三种方案5.2脱皮机构运动方案的选择和评定方案一方案二方案三方案一:圆柱齿轮与直齿圆锥齿轮串联机构工作原理:直齿圆锥齿轮啮合,实现垂直平面速度换向;圆柱齿轮啮合,实现平行平面速度反向。
两种啮合串联从而使轧辊按要求运动。
优点:结构紧凑,稳定性,传动性良好,便于装配。
方案二:直齿圆柱与涡轮蜗杆串联机构工作原理;直齿圆锥齿轮啮合,实现垂直平面速度换向;涡轮蜗杆啮合,实现平行平面速度反向。
两种啮合串联从而使轧辊按要求运动。
优点:结构比较紧凑,能实现大传动比传动。
缺点:结构复杂,稳定性能不是很好。
方案三:双曲柄机构与涡轮蜗杆串联机构工作原理:涡轮蜗杆啮合,实现垂直平面速度换向;双曲柄机构,实现平行平面速度反向。
两种机构串联从而使轧辊按要求运动。
优点:能实现使双轴轧辊反向运动的功能。
缺点:不便与轧辊装配,结构复杂,传动性较差。
结论:在三个方案的比较下,选取方案一作为脱皮机构比较合适。
5.3定位夹紧机构选型定位切皮机构和夹紧机构方案图5-3定位夹紧机构的三种方案方案一:凸轮机构工作原理:凸轮匀速转动,带动小凸轮转动,由于圆柱凸轮轮廓的作用,使杆往复运动。
优点:机构简洁,尺寸较小,方便实现与其他机构原动件的串联。
可实现在预定位置的较长时间的停歇。
运动规律可按自己的需求设定。
方便实现所要运动规律。
正好可用于此课题中,夹紧、定位切皮运动要求。
方 案二: 曲柄滑块机构的改装工作原理: 主动导杆匀速转动,带动同时也在凸轮沟槽中运动的滚子,通过连杆使滑块往复移动。
优 点: 当导杆在一定角围转动时,滑块在左极限位置停歇。
可实现单侧停歇的歇移动。
此机构可实现单侧的较长时间的停歇。
缺 点: 此机构只可以在左极限位置实现较长时间的停歇,不能在其他位置实现停歇,因而舍弃。
结构复杂,且便于实现原动件的串联。
方 案三:采用曲柄滑块机构工作原理:主动导杆匀速转动,通过连杆使滑块往复移动。
优 点:此机构结构简洁,设计简单、方便。
尺寸较小,缺 点:滑块在行程末端只作瞬时停歇,运动规律不理想,且便于实现原动件的串联。
总 结: 最终选择方案一,做切夹紧、定位切皮机构。
6.机械传动系统的速比和变速机构==0.67i i i 入总出第一级传动采用锥齿轮传动,传动比为1第二级传动采用圆柱齿轮传动,传动比为0.677.脱皮机构的尺度设计根据方案一设计双轧辊脱皮机构示意图,如图7-1所示:图7-1双轧辊脱皮机构示意图由于蚕豆长度:20-25mm蚕豆宽度:15-20mm蚕豆厚度:6-8mm。
我们选用的是平放挤压,所以轧辊的间隙应该稍小于蚕豆的厚度,轧辊的长度应该大于蚕豆的宽度。
其具体尺寸设计如下:轧辊的间隙为5-7mm,长度为40-50mm,半径35mm 轧辊的实物图和装配图如图7-2所示:图7-2轧辊三维图另外,由于蚕豆的皮很容易粘在轧辊上不利于连续脱皮,故可在斜槽上可以设置一个挡板,该挡板的功能等同于刮刀,防止豆皮粘在轧辊上,不利于下一个蚕豆的挤压。
同时,不需要用到其它清扫机构,使该机构更为简洁。
其实物图如图7-3:图7-3清扫器三维图接下来,需要对四个齿轮尺寸进行分析,其位置关系如图7-4所示:图7-4齿轮位置关系图四个齿轮的尺寸大小,根据辊子大小,选择如表7-1所示:齿轮序号 ①② ③ ④ 模数M 3 3 3 3 齿数Z 30 20 20 20 压力角α 20 20 20 20 齿厚b 10 10 20 20 分度圆直径d=m ×z 90 60 60 60 基圆直径d b =d ×cos α84.5756.38易知,这四个齿轮构成了一个定轴轮系,锥齿轮4带动锥齿轮3转动,锥齿轮3与圆柱齿轮2固接,圆柱齿轮2又带动圆柱齿轮3转动.其传动比的计算如下:123430,20,20,201422020140.6743120302432024143220z z z z z z i z z z z i z z ωωωω====⨯====⨯⨯====⨯8. 定位切皮凸轮机构及夹紧凸轮机构设计8.1定位切皮凸轮机构及夹紧凸轮机构应满足的要求根据前面运动循环图所述,凸轮要满足的位移如图8-1所示:图8-1凸轮的位移线图定位切皮凸轮机构的运动简图如图8-2所示,此机构即为一个对心直动滚子从动件盘形凸轮机构,为了安装方便以及简化计算,使其从动件的水平运动状态与滚子的水平运动状态保持一致,即它们的放大系数K=1。
这样设计是因为:此机构是把定位和切皮两种功能联动组合起来的,我们把此凸轮的基圆半径设计为R1=80mm,滚子的半径设计为r1=15mm 。
图8-2定位切皮凸轮机构的运动简图夹紧凸轮机构的机构简图如下图8-3所示,此机构相当于一个对心直动滚子从动件盘形凸轮机构和一个运动放大机构串联组合起来的。
其放大系数k=s0/s=250/170=1.47。
夹紧蚕豆所需要的空间少,S0max=7.35mm、时间短,t= 125ms,考虑到这些因素根据此要求,我们设计的基圆半径R2=40mm,滚子半径r2=15mm8-3夹紧凸轮机构的机构简图定位切皮凸轮和夹紧凸轮的实物图及轮廓图如图8-4、图8-5所示:图8-4定位切皮凸轮和夹紧凸轮的三维图由于豆宽为15——20mm,槽设定为21mm,定位机构在理想位移为23mm,过大会不经济,过小又不会满足工作需求。