轴角位置数模转换器RDC设计原理
- 格式:pdf
- 大小:287.65 KB
- 文档页数:9

数模转换器工作原理数模转换器(ADC)是一种电子设备,它可以将连续的模拟信号转换成离散的数字信号。
这种转换器在现代电子设备中被广泛应用,比如数字音频设备、数字电视、数字相机等等。
在这篇文章中,我们将深入探讨数模转换器的工作原理,了解它是如何将模拟信号转换成数字信号的。
首先,让我们来了解一下模拟信号和数字信号的概念。
模拟信号是连续变化的信号,它可以取任意的数值。
比如我们平时听到的声音、看到的图像等都是模拟信号。
而数字信号是离散的信号,它只能取有限个数值。
在计算机和数字设备中,所有的信号最终都会被转换成数字信号进行处理。
数模转换器的工作原理可以分为三个主要步骤,采样、量化和编码。
首先是采样,即将连续的模拟信号在时间上进行离散化。
这个过程是通过一个时钟信号来控制的,时钟信号会以一定的频率对模拟信号进行采样,将连续的信号转换成离散的信号。
采样的频率通常以赫兹(Hz)为单位,常见的采样频率有44.1kHz、48kHz等等。
接下来是量化,即将采样得到的离散信号转换成数字信号。
量化的过程是通过一个模数转换器(ADC)来完成的。
模数转换器会将采样得到的离散信号转换成一系列的数字代码,这些代码代表了信号的幅度。
量化的精度通常以位数来表示,比如8位、16位、24位等等,位数越多,表示精度越高,能够更准确地表示原始信号的幅度。
最后是编码,即将量化得到的数字代码转换成二进制形式。
这个过程通常是通过一个编码器来完成的,编码器会将数字代码转换成二进制形式,以便于数字设备进行处理和存储。
总的来说,数模转换器的工作原理可以简单概括为将连续的模拟信号经过采样、量化和编码三个步骤转换成离散的数字信号。
这种转换过程是通过时钟信号、模数转换器和编码器来完成的。
数模转换器的性能取决于采样频率、量化精度和编码方式,不同的应用场景需要选择合适的数模转换器来满足其要求。
在实际应用中,数模转换器的性能对于信号的质量和精度有着重要的影响。
因此,在设计数字设备和电子系统时,需要根据具体的应用需求选择合适的数模转换器,以确保信号的准确性和稳定性。

数模转换器的原理与设计数模转换器(DAC)是一种电子设备,用于将数字信号转换为模拟信号。
在电子系统中,数字信号通常由二进制位表示,而模拟信号则是连续的信号。
因此,DAC在许多应用领域,如音频处理、通信系统和控制系统中起着重要作用。
本文将介绍数模转换器的原理和设计要点。
一、原理数模转换器的原理基于脉冲宽度调制(PWM)或脉冲数调制(PCM)。
在PWM中,数字信号的幅值由脉冲的占空比表示,而在PCM中,数字信号的幅值由脉冲的数量表示。
根据不同的应用需求,选择合适的原理进行设计。
PWM数模转换器将数字信号分为一个个固定周期的脉冲,脉冲的高电平时间与数字信号的幅值成正比。
通过对脉冲的宽度进行精确的控制,可以实现精确的模拟信号输出。
PCM数模转换器将数字信号转换为离散的脉冲序列,每个脉冲代表一个特定幅值的信号。
通过选择合适的采样率和量化级别,可以实现高精度的模拟输出信号。
二、设计要点1. 数字信号处理:数模转换器的性能受到数字电路设计的影响。
为了获得高质量的模拟输出,需要对数字信号进行滤波、抗混叠滤波和数据解码等处理。
这些步骤需要使用适当的算法和技术进行设计。
2. 电压参考源:数模转换器的输出信号幅值通常由参考电压决定。
因此,稳定和精确的电压参考源对于设计至关重要。
选择合适的参考源,并采取措施保证其稳定性和准确性。
3. 输出电路:为了确保模拟输出信号的稳定性和质量,需要设计合适的输出阻抗匹配电路和缓冲电路。
这些电路可以抑制信号反射和功率损耗,提高转换器的性能。
4. 精度和分辨率:数模转换器的精度和分辨率是衡量其性能的重要指标。
精度是指输出信号与输入信号之间的偏差,而分辨率是指数模转换器能够表示的最小幅值变化。
为了获得高精度和高分辨率的模拟输出,需要选择适当的ADC芯片和采样率。
5. 抗干扰性:数模转换器的设计还需要考虑抗干扰性能,以防止外部噪声对输出信号的影响。
常见的抗干扰措施包括对时钟信号进行滤波和建立合适的接地和屏蔽措施。
数字-模拟转换器(DAC)原理研究电子0801班0821401408214013一题目简述随着科学技术的发展, 我们常常要用模拟系统来处理数字信号. 这就需要数字-模拟的转换. DAC的作用是将计算机或控制器产生的二进制数字转换成与之成比例的模拟电压. 其意义相当于一种译码电路. 本次的数模原理研究主要介绍全电阻网络D/A转换器和倒T型电阻网络D/A转换器, 利用等效方法和叠加原理推导输出电压, 比较两种转换器的特点. 并用EWB软件来验证电路的工作原理.二 DAC原理1. D/A数模转换器的设计思想D/A数模转换器在某种意义上说相当于一种译码电路,将给定的二进制码的量译成相应的模拟量的数值。
数字量是由二进制数位组合起来,而每位数字符号都有一定的权。
例如,四位二进制数1101每位的权对应十进制数值从高位到底为排列依次为8,4,2,1(必须位置上是一才有效)。
所以二进制数1101代表十三。
为了将数字量转换成模拟的量,可以将每一位数字量按权的大小装换成模拟量。
然后将这些模拟量相加,所得到的总的模拟量就是数字量所必须转换成的模拟量。
2.权电阻网络D/A转换器(1) 数模转换的一种方法是使用电阻网络,网络中阻值表示数字码输入位的二进制权值。
输入的电平决定电流的有无,开关接入相应电压Vs时,输入电压为Vs,二进制数位“1”。
开关接地时输入电压为0V,二进制数为“0”. 如下图给出了一个三位的DAC。
上面已经提及开关,,……,,分别受输入代码,,……,,的状态控制,由于虚地点的存在,其中某个开关接到“1”或“0”在电阻支路产生的电流为即支路电流总和 I==++=++=[]=所以输出模拟电压推广上式表明,输出的模拟电压正比于输入的数字量,从而实现了从数字量到模拟量的转换。
当=0时,=0,而=11…11时,=,故的最大变化范围是0~。
从000到111所有数字信号对应的模拟电压二进制数U0/V D0 000 0D1 001 1.5 D2 010 3D3 011 4.5 D4 100 6D5 101 7.5 D6 110 9D7 111 10.5 EWB仿真结果输入信号000输入信号001输入信号100输入信号011输入信号010输入信号110输入信号101输入信号111此类型DAC特点:结构简单,所用电阻由于元件数减少,该转换器的转换精度取决于基准电源,电子模拟开关,运算放大器及各权电阻的精度。
详谈数模转换器(DAC)的工作原理与应用数模转换器是执行转换操作的电子设备。
顾名思义,它将数字输入信号转换为模拟输出信号。
可以使用数模转换器将诸如数字音乐之类的数字信号转换为模拟声音。
它是数据转换器的一种。
数模转换器也称为数模转换器,D转换器,数模转换器转换器,D / A转换器等,数模转换器(ADC)进行反向操作。
一、数模转换器的工作原理数模转换器是用于数模转换的设备。
数字信号定义为时间离散和幅度信号离散。
同时,将模拟信号定义为时间连续和连续幅度信号。
数模转换器将定点二进制数字(适当的抽象精度数字)转换为物理测量结果。
数模转换器基于Nyquist-Shannon采样定理工作。
它指出–如果采样率大于或等于输入信号中存在的最高频率分量的两倍,则可以从其采样输出中恢复输入信号。
有几个参数可以测量数模转换器的性能。
输出信号的带宽,信噪比是一些参数。
二、数模转换器的电气符号数模转换器的符号三、数模转换器的应用1、音频处理在当今的数字化时代,音乐和其他音频以数字化格式存储。
当我们需要在扬声器或耳机中听到它们时,则必须将数字形式转换为模拟信号。
这就是为什么在每个可以播放音乐的设备中都找到数模转换器的原因,例如MP3音乐播放器,DVD播放器,CD播放器,笔记本电脑,移动电话等。
高端高保真系统使用专用的独立数模转换器。
在现代数字扬声器(例如USB扬声器,声卡等)中可以找到类似的数模转换器。
在IP语音通信中,源被数字化。
因此,需要一个数模转换器将数字化部分重构为模拟信号。
2、视频编码视频编码器系统处理视频信号并将数字信号发送到IC。
3、数字显示图形控制器通常使用查找表来生成发送到模拟输出的信号(例如RGB信号)以驱动显示器。
4、校准数模转换器可以提供动态类型的校准,以提高测试系统的精度。
5、控制电机数模转换器还用于需要电压控制信号的电动机控制设备中。
数模转换器还用于数据分配系统,数字电位计,软件无线电和许多其他地方。
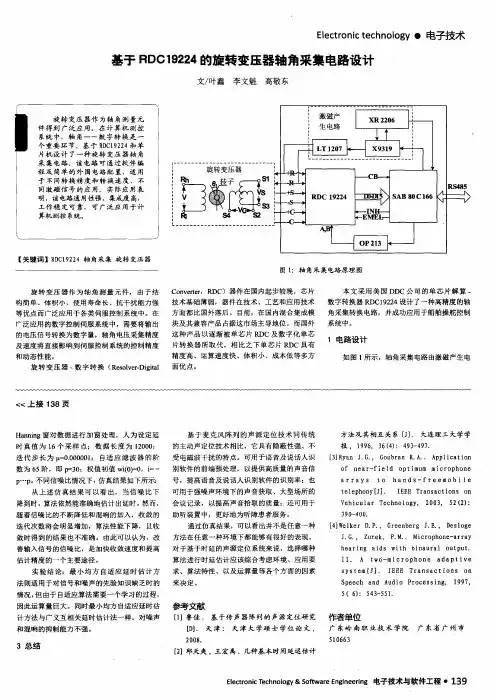
高精度数字化轴角转换器的设计作者:李宝龙李宝珺来源:《科技资讯》 2011年第19期李宝龙1 李宝珺2(1.西安电子工程研究所西安 710100; 2.西安应用光学研究所西安 710065)摘要:介绍了一种通过FPGA来完成数据采集、运算,实现高精度轴角转换设计。
运用双通道旋转变压器数据的纠错组合原理、方法,及其在FPGA当中的软件实现,发挥了FPGA在数据处理上的优势,实现了轴角转换的实时、高精度、高可靠性,具有较广泛的应用范围。
关键词:旋转变压器 FPGA 轴角转换中图分类号:TM383 文献标识码:A 文章编号:1672-3791(2011)07(a)-0061-01角位置测量是工业控制系统的重要研究内容,在系统控制当中有着广泛的应用。
为了适应测量、伺服系统数字化的要求,常采用轴角数字转换器完成模拟角位移信号到数字信号的转变。
高精度双通道旋转变压器数字转换器(RDC)轴角转换系统,以其高可靠性著称,应用广泛。
本文从工程应用的角度,针对精密无刷多极双通道旋转变压器,采用高精度、高集成度双路RDC模块作为轴角解算元件,应用大规模FPGA器件,实现实时、高精度轴角转换。
1 系统硬件组成精密多极双通道旋转变压器作为轴角测量元件,一般与转轴同轴安装,它相当于一台1∶1的旋转变压器和一台1∶n的旋转变压器的结合体。
当粗机旋变转过1圈时,精机旋变则转过n圈,即粗机以360°为1个周期,精机以360°/n为1个周期,精机的1圈(360°)表示真实轴角角度的1个360°/n。
这种方式相对于单极单通道具有更高的测角精度。
RDC模块采用了二阶无静差伺服系统原理,具有精度高、稳定性好、跟踪速度快等优点。
当其端子上加上旋变的正、余弦信号和激磁信号后,就能输出一个并行TTL电平的二进制码,表示以1转为单位的输入角的二进制码。
本系统采用的RDC模块是双通道转换器,内部2个通道相互独立,集成度更高,有独立的参考电压和输入信号,其输出数据双通道公用,通过锁存器与外部数据总线连接,如14XSZ2S02系列,分辨率为14位,解算精度5.2′。
小尺寸高频双通道旋变-轴角编码组件电气误差研究摘 要双通道旋转变压器--轴角编码组件一直是军事装备系统中主要的角度位置测量定位元件但是随着武器装备发展原有的精度已显得不够因此研制新型的小尺寸高频高精度双通道旋转变压器并且数字化集成化以及应用其理论模型对轴角编码电路进行改进提高无论在理论还是实际上都是一个很有意义的课题 本文对旋转变压器的基本原理做了介绍并描述了跟踪反馈法工作的专用编码大规模集成电路( RDC RDC RDC )所具有的一些特点再论述了双通道旋转变压器-轴角编码组件通常的编码方法特别是采用跟踪反馈法编码工作的原理然后对粗精两通道固有零位偏差实行补偿组合所采用的方法进行了分析并讨论了双通道旋转变压器-轴角编码组件的一些特点展望了国内外旋转变压器-轴角编码组件发展的方向和趋势作者对双通道旋变-轴角编码组件电气误差进行了研究分别建立了旋转变压器的数学模型及跟踪反馈型轴角数字转换器的数学模型并给出了电气误差的数学描述对各类因素引起旋转变压器-轴角编码组件电气误差作了详细的阐述这在工程上是十分重要的在建立数字编码产生的误差基础之上对小尺寸高频双通道旋变-轴角编码组件进行误差分析对离散化的误差数据处理得到连续有规律的小尺寸高频双通道旋变-轴角编码组件电气误差函数表达形式通过其数学化模型采取相应补偿措施实现进一步提高组件精度最后对整个组件系统的设计工作做了总结对其所具有的一些特点作了描述同时提出了有待完善和改进的一些地方对进一步发展方向进行了展望关键词双通道旋变轴角编码电气误差研究Research and Analysis of Error by Two-Speed ResolverShaft EncoderABSTRACTTwo-speed resolver shaft encoder is always the main component of angle measuring in the military equipments. As military equipments are improving, ones with lower precision cannot meet the need for nowadays requirements. So it is very important for us to study on new type of two-speed resolver shaft encoder with small size and high frequency and precision by applying its mathematical electric error model to improve the shaft encoder. It is a very useful theme not only in theory but also in practice.This paper introduces some basic concepts in Sine -Cosine resolver and describes some characteristics of the special circuit ( Resolver-to-Digitai Converters, abbreviated as RDC ) by means of the tracking feedback method, the paper introduces the normal encoding methods of two-speed resolver shaft encoder. Especially the way of the tracking feedback method, and then describes the assembled compensating way of connatural null error of the Coarse and the Fine. In addition somecharacteristics of two-speed resolver shaft encoder, and reviews the trend of the shaft encoder.The mathematical model of the resolver and the shaft encoder of the tracking feedback method is established as well as errors in mathematics. Also it gives a detailed description on all the complications that can cause electric error. This is very useful in the engineering. The writer analyses the error of two-speed resolver shaft encoder with small size and high frequency. Based on bringing digital error continuous regular expression of the shaft encoder error through data processing can be obtained. By establishing the mathematical model and taking the corresponding measure, we can improve the precision of the shaft encoder further.In the last, the paper summarizes the design of the whole shaft encoder, describes some characteristics of this shaft encoder. We also propose some problems for further research.KEY WORDS:KEY WORDS: two-speed resolver shaft encoder research ofelectric error附件四上海交通大学学位论文原创性声明本人郑重声明是本人在导师的指导下除文中已经注明引用的内容外对本文的研究做出重要贡献的个人和集体本人完全意识到本声明的法律结果由本人承担陈世琪日期附件五上海交通大学学位论文版权使用授权书本学位论文作者完全了解学校有关保留同意学校保留并向国家有关部门或机构送交论文的复印件和电子版本人授权上海交通大学可以将本学位论文的全部或部分内容编入有关数据库进行检索缩印或扫描等复制手段保存和汇编本学位论文 本学位论文属于 不保密 陈世琪 指导教师签名2004年09月17日 日期第一章 绪论 旋转变压器是第二次世界大战末期出现的一种信号机电元件由德国科学家首先提出并将其实用于武器装备中作为轴角位置测量元件主要应用于军事领域作为V -2导弹改进型的惯导系统坐标分解器及履带式自行火炮的火控系统角位置控制这类元件渊源为电机基本原理输出信号以模拟量形式当时的研制仍处于雏形阶段旋转变压器的电气精度为120180二战结束后美俄两国悉数搜罗德国科学家从事科学研究旋转变压器作为其中的项目自此没有停顿至今随着新技术新工艺的出现及其大规模集成电路的应用使之无论在理论上还是实际应用上都有了极大的发展现双通道旋转变压器的电气精度可达513141520近期双通道旋转变压器与大规模编码集成电路芯片组成轴角编码组件输出信号为数字量形式经误差模型化的综合补偿通过电子技术处理其电气精度已达 3.0并可通过GPS 实时数据传输作为角度测量装置广泛应用于飞机巡航导弹的惯导系统及其指挥中心的定位等系统 旋转变压器的环境适应性远优于光栅类和磁性类编码器随着其电气精度提高及数据传输的通用正起着越来越重要的作用同时武器装备的发展系统对旋转变压器的要求亦越来越高其技术指标的需求主要体现为以下几点a 微轻高精度及高可靠性的要求 轴角位置精度自身质量及可靠性要求进一步提高结构轴向尺寸薄重量轻要求旋转变压器和编码集成电路芯片RDC 组成轴角数字编码组件b 控制系统的实时性 轴角位置电气精度的表述大多只建立在静态描述方程式基础之上系统对其动态误差特性是不予考虑的现要求考虑动态性能使旋转变压器的激磁频率提高至20 KH KHz z 25 KH KHzz 左右对机电元件而言已属于高频范围旋转变压器的电气精度εδE 与其激磁频率f 和极对数ρ的关系为fE ×∝ρεδ1 1-1 由式1-1可知若旋转变压器以极对数ρ来获得高精度必须同时要提高激磁频率f 来满足电气精度εδE 的要求这时的高频多极旋转变压器是一种新型电磁结构的轴角位置传感器c 国防工程的需要小尺寸高频高精度双通道旋转变压器-轴角编码组件以高激磁频率秒级电气精度良好的动态性能抗干扰能力及高可靠性应用于军事工程中国防工程急需此类产品配套1.1 旋转变压器的基本原理1256旋转变压器的输出电压是转子机械角度θ的函数若为正余弦函数则称其为正余弦旋转变压器若为其他类型函数则称其为某某函数旋转变压器旋转变压器的原理示意图见图1-1旋转变压器的基本工作原理与一般变压器相似当交变激磁电压)()(ϕω+×=t Sin Uin tU 施加于旋转变压器定子绕组S 1S 3时在定转子气隙中建立一个交变磁场当转子从基准电气零位转动一机械角度θ时转子的正弦R 1R 3与余弦R 2R 4绕组的输出电压分别为 c in Uc Sin Sin t Us Cos Sin tc out S s out s in in Sin t R 图1-1 旋转变压器的原理示意图Fig.1-1 The principle of resolver.)]()()([ϕωθϕωθϕωθ+×××+++××=t Cos Sin dtd t Sin Cos Uin k Us )]()()([ϕωθϕωθϕωθ+×××+−+××=t Cos Cos dt d t Sin Sin Uin k Uc 1.1-1其中Uin 激磁电压的幅值k 为输入输出电压比ω为激磁角频率ϕ为激磁初相角正余弦旋转变压器是基于正弦分布绕组来实现输出正弦与余弦电压的 a 正余弦旋转变压器绕组结构 正余弦旋转变压器的结构如同一般的旋转电机定子和转子的铁心由硅钢片构成片上有齿和槽槽中嵌放绕组在定转子之间有一均匀气隙为了使输出电压与转子机械角度θ成正弦或余弦关系采用了正弦分布绕组的定子为16槽时的绕组示意图见图1-2i Cos Nm Ni ϑ×= 1.1-2其中Ni 表示第i 号线圈的匝数1-m-8号线圈的跨距最大4/1Zs s W Nm ∋=是一个常数Zs i i πθ)12(−×=Zs 为定子的槽数11图1- 2 定子为16槽时的绕组示意图Fig. 1-2 The winding sketch map when the stator ’s slot are 16.b 正弦分布绕组的磁势旋转变压器气隙中的磁场除了与激磁绕组的结构有关还与铁心材料的特性气隙的均匀程度有关一般总是使铁磁材料处于不饱和状态的线性段这样铁心的磁阻与气隙的磁阻相比是很小的可以忽略同时在加工制造时尽可能使气隙均匀因此分析绕组产生磁场的影响时首先假设铁心磁阻为零气隙是均匀的当定子激磁绕组接至交流电源绕组的各个线圈就建立起磁场沿定子铁心气隙转子铁心而自行闭合在空间形成一个以交流电源频率脉动的二极脉动磁场由于磁场是对称的并且在不计铁心磁阻情况下是线性的所以可应用叠加原理将整个绕组产生磁场看作是每个线圈单独在气隙中形成的磁场总和1号线圈的磁势为 oBm Fm µδ×=11 其中图1-2中气隙1-m-8段的磁密相等为1Bm 9-n-16段的磁密相等为1Bno µ 为空气的导磁率是气隙的长度同理o Bn Fn µδ×=11根据全电流定律沿磁力线闭合路径上的磁势等于该闭合路径包围的全电流因为每一条磁力线所包围的电流均为1N i ×所以111N i Fn Fm ×=+根据磁场中等效磁通连续性的原理有11n m Φ=Φ所以可得出πβπ2211111−===SmSn Bn Bm Fn Fm 即 111)22(N i Fm ×−=πβπ 1112N i Fn ×=πβ 其中1β为1号线圈跨距角同理直至9号线圈磁势111192(N i Fn Fm ×−==ββπ 111192N i Fm Fn ×−==ββπ 叠加之后116981N i n F m F ×==−−−− 1.1-3即线圈的合成气隙磁势波形是矩形波而二个对称矩形波组成二极其幅值和跨距都是相等但极性相反分别等于一个线圈的安匝及跨距1-m-8和9-n-16两线圈的磁势函数可写成),(1=t fθ 当)](21[01βπθ−±=以及πβπθ)](21[1+±= t Sin IN iN t f ωθ1112),(== 当)](21)(21[11βπβπθ+−±= 1.1-4图1- 3 定子为16槽的磁势叠加示意图Fig. 1-3 The sketch map of the magnetic motion force summation when the stator ’sslot are 16.一个阶梯波在两极下是对称分布的因此空间磁势分布曲线是奇函数没有偶次谐波应用傅立叶级数分析法可以将这个阶梯波分解成基波和一系列奇次谐波分量定子为16槽的磁势叠加示意图见图1- 3t Sin Sin F Sin F Sin F t f ωυθυθθθ)3(),(113111⋅⋅⋅++⋅⋅⋅++=1.1-5第υ次谐波磁势的幅值为t Sin NmCos I d Sin t f F ωυθπυθυθθπυπ1201122241),(4×××=×=∫1.1-6同样对i 号线圈来说其谐波磁势的幅值为t iSin NmCos I Fi ωυθπυυ22241×××=1.1-7同理可以推出每对线圈的合成磁势波形是一个个阶梯波的叠加各级阶梯的高度和宽度等于相应线圈的安匝和跨距旋转变压器的正弦绕组在两极下是对称分布的因此空间磁势分布曲线是奇函数没有偶次谐波应用傅立叶级数分析法可以将这些阶梯波分解成基波和一系列奇次谐波分量总磁势∑==4/1),(),(S Z i t fi t f θθt Sin Sin Fi Sin Fi Sin Fi S Z i S Z i S Z i ωυαυαα)3(4/14/134/11∑∑∑===⋅⋅⋅++⋅⋅⋅++=t Sin Sin F Sin F Sin F ωυθυθθ)3(31⋅⋅⋅++⋅⋅⋅++=其中υF 的表达式为122[22414/1∑=−××××=S Z i S Z i Cos Ni t Sin I F πυωπνυ 1.1-8当1=υ时将Zs i Cos Nm Ni π×−×=)12(代入上式122[4/1∑=−×S Z i S Z i Cos Ni π中有 ∑∑==−=−×4/124/1122]122[S Z i S S Z i S Z i Cos Nm Z i Cos Ni ππ 14/14]12[24s W Nm Zs Z i Cos Nm Nm Zs S Z i S∋=×=−×+×=∑=π当υ为其它奇数时=−×∑=122[4/1S Z i SZ i Cos Ni πυ 0]121121[2124/1=−×−+−×+=∑=SS Z i S Z i Cos Z i Cos Nmπυπυ因此基波磁势幅值tNmSin ZI t NmSin ZI F S Sωωπ49.042241==1.1-9从上式可以看到当υ为其它谐波时0=υF只有当谐波次数为1±×=S Z k υ时12)12([2]12)1(2[4/14/1∑∑==−±−×=−±××S Z i S S Z i S Z i Zs i kZs Cos Ni Z i Zs k Cos Ni πππ Nm Zs Z i Cos Ni k k S Z i S4)1(122)1(4/1−=−×−=∑=π齿谐波磁势的幅值t Sin Nm Z I kZ k kZs F SS ωπ×±−=±42241111 1.1-1由此可以得出如下结论1正弦绕组构成的磁势中除基波和齿谐波外其它各次谐波都可消除2齿谐波的幅值是基波的11±kZs 倍3各个线圈的匝数取数和理论匝数不等引起其他各次谐波的出现c 正弦分布绕组感应的电势为使转子绕组感应出的电势与转子的位置角之间能保持严格的正弦关系转子绕组同样采用正弦分布绕组转子为12槽时的绕组示意图见图1-411m图1- 4 转子为12槽时的绕组示意图Fig. 1-4 The winding sketch map when the rotor ’s slot are 12定子绕组产生的气隙基波磁场),(1t B θ和υ次谐波),(t B θυ与转子正弦绕组一对第1-m-6号和7-n-12号线圈的匝连情况转子第17号线圈匝连的基波磁通示意图见图1-5⋅⋅⋅++⋅⋅⋅++=),(),(),(),(31t B tB t B t B θυθθθt Sin Cos Bm Cos Bm Cos Bm ωυθυθθ)3(31⋅⋅⋅++⋅⋅⋅++=1.1-11当定子电流达最大I 2时转子绕组第1-m-6和7-n-12号线圈所匝连的磁通量为υθυυυθυθθυυθβθβSin 2βSin Bm lRd lRCos t B Φ1)121()121(14),(2=×=∫+−−1.1-12其中l 为转子铁心长度R 为转子铁心半径--1v+1/2-1/201111图1-5 转子第17号线圈匝连的基波磁通示意图Fig. 1-5 The sketch map of the basic flux when the stator ’s slot 1 and slot 7 iscontected.因为121υ111)()(υθυυCosθ2πSin 2βSin −−=−=所以υθυθυυυυSin Cos Bm lR Φ12114)1(−−=1.1-13磁链υυ111ΦNz ×=Ψ这样第1-m-6和7-n-12号线圈感应的电势的有效值为υθυθυυπυυSin Cos Bm lR fNz E 1121142)1(−−=υθυθυπυSin Cos Nz m f 11212Φ2)1(−−=1.1-14采用叠加的方法得到整个绕组感应的电势为∑∑=−=Φ−==4/1214/1)](2[2)1(R R Z i i Z i Sin NziCos m f Ei E υθυθυπυυυ基波电势θπNsmSin Zrf ΦE m 4211=1.1-15而当电势的谐波次数为1±=kZs υ时齿谐波电势的幅值是θπ)1(42241111±±−=±kZs NsmSin ZrI kZs k kZsE1.1-16由此可以得出如下结论1定转子均为正弦绕组构成的感应电势中只感应出基波和副方齿有关连次谐波电势其它各次谐波的磁场虽存在但无法在正弦绕组中感应出相应的电势2齿谐波电势的幅值是基波的11±kZs 倍3由于线圈的匝数取整等原因电势υE 与转子转角θ的关系中谐波电势仍存在造成电势θθυ)(E 的正余弦函数误差因此尽可能削弱谐波电势4空间电势分布曲线亦是奇函数没有偶次谐波d 谐波电势的进一步削弱槽配合与斜槽根据以上结论进一步削弱谐波电势可采取槽配合和斜槽两个措施 1由于激磁绕组对1±kZs次谐波敏感感应绕组对1±kZr 敏感所以要选取适当的槽配合使11±≠±kZrkZs2采用转子斜过一定槽距的斜槽来削弱某次齿谐波1.2 旋转变压器旋转变压器测量角度测量角度测量角度的应用的应用早期轴角编码器是采用有电刷的接触式码盘在码盘上刻有导电区和绝缘区相互间隔许多同心的轨道每n 轨道上导电区的数目等于码盘每转一周的计数总数2n而2n除以360即为表示角度码盘的分辨率由于接触可靠性差的原因进而发展了光栅和磁性码盘虽然它们克服了电刷接触的缺点但是光栅的玻璃和磁性码盘易破裂可靠性差同时码盘套在测角轴上占据了很大空间因此旋转变压器在军用装备中代替上述码盘主要是提高可靠性方便安装调试并内径大体积小近期的高精度数字控制系统中常需将轴角位置以下列几种方式直接转换成数字输出应用于系统中a 一般来说可用旋转变压器输出电压的幅值与转子转角的函数关系即t Sin t Ec t Es ωθθθ×∝),(),(与应用在轴角位置及角速度反馈信息的系统中如雷达跟踪扫描系统其需要轴角位置信息通过数字计算机来跟踪和修正飞行器的轨道等b亦可利用旋转变压器输出电压的幅值与转子转角的正余弦函数关系即t Sin Sin t Sin Cos t Ec t Es ωθωθθθ××∝及与),(),(应用在飞机和巡航导弹的惯导系统中作为坐标分解器将轴角的直角坐标变换为极坐标或者反之系统将多维空间信号转换成某一固定模式这时飞机为四维变换而巡航导弹为三维变换c上述两种旋转变压器的应用均为其输出电压的幅值是转子转角函数的关系相位则是固定不变的旋转变压器的移相回路输出如图1- 6所示这时移相回路输出电压),(t c Us θ−为t Sin C jR C jCos Sin Sin Uin k t c Us ωωωθθθθ×−−−−×=−11)([),(若CR ω1=则t Sin jSin Cos Uink t c Us o o ωθθθ×−+−×=−)]45()45([2),(令o45'−=θθ则t Sin jSin Cos Uink t c Us ωθθθ×+×=−)(2),(''c out c in s-c(,t)CosSin tSintSin Sin ts out s in 图1-6 旋转变压器的移相回路输出 Fig. 1-6 The output of shift phase loop of the resolver.移相回路输出电压),(t c Us θ−信号的幅值大小不变相位随转角θ而变一般利用旋转变压器的移相特点应用于光电瞄准系统跟踪定位目标d 将两同类型旋转变压器可作为一种同步随动系统这时一个旋转变压器是发送机-转角θ另一个是接收机-转角φ这时转角φ为θωθωθφ=××××==−−tSin UinCos k tSin UinSin k tan Us Uc tan 11可应用在潜艇的声纳跟踪扫描系统中潜艇外探测目标而在潜艇内部接收该信号再处理1.3 旋转变压器轴角编码工作原理161718旋转变压器的轴角编码采用两种形式旋转变压器输出电压的幅值与转子转角的函数关系输出电压的相位与转子转角的函数关系即轴角的模拟量通过模数转换器为数字量输出但是大部分均采用下面介绍的方法a 旋转变压器相位的轴角编码原理图见图1-7 cSint+sCosSin tcSinSin t U c out U s inU s out R c in U 图1-7 旋转变压器相位的轴角编码原理图Fig.1-7 The principle of shaft encoding of resolver ’s phase.精密相移网络代替代替早期的电阻电容移相回路把旋转变压器输出电压的调幅信号变成调相信号即转子转角信号变为相位角信号旋转变压器输入与移相输出电压经限幅放大整形及检相两者相位之差即对应于转子转角信号相位差经检相装置变为一个时间间隔此间隔通过控制门由高频脉冲填满可定时统计总脉冲数此数字即为被测转角这种装置相当一台频率计b 旋转变压器输出电压幅值的轴角编码原理图见图1-8cSin tsCos Sin tcSin Sin t数字输出cSin-Sin tsCos Sin Sin tcSin Cos Sin ts inc in c out R s out U S 1-Fig.1-8 The principle of shaft encoding of resolver ’s amplitude.图1-8是利用桥式电路的方法来转换成数字量输出旋转变压器的输出U s和U c 分别与一对自耦变压器相接自耦变压器上有许多按照角度的正余弦函数变化的准确抽头用数字量输出角φ的反馈来控制接至自耦变压器抽头上的一组开关电路使得通过自耦变压器的引出信号按照数字输出角φ的正余弦函数来调幅将两组自耦变压器上引出的信号接到带极性的加法电路其输出信号将按轴角输入量θ和数字量输出角φ之差的正弦函数来调幅再判决后经过放大和解调并和一个2LBS最低位电压的固定电平相比较若误差信号大于此固定值就把它的极性检测出来变成一个决定上下计数的方向信号使计数器往上数或往下数这种动作一直继续下去直到数字输出角φ和模拟输入角θ的差值在2LBS以内为止至此方向信号变为0计数器就停在相当于轴角θ的数字输出φ值上这种闭环式轴角转换器本身的数字量化误差和数字位数有关为满刻度输出的n 2121×--n 是计数器的位数一个12位二进位数字输出的轴角转换器其变压器抽头就需要4096212=个为了减少抽头和相应的开关数通常采用串级的自耦变压器这就需要数台变压器来产生一个三角函数在串级使用变压器时就很难应用固体开关电路只能采用继电器所以此类轴角转换器的体积较大转换速度不高而且需要精度很高的变压器来形成桥式电路产生误差信号c 旋转变压器输出模拟与数字量转换后运算的轴角编码原理图见图1-9数字量输出cmCosSin t专用电tan-1cmSinSin tSR sCosSin tcSinSintcSint c in c out U s out s in 图1- 9 旋转变压器输出模拟与数字量转换后运算的轴角编码原理图Fig.1-9 The principle of shaft encoding of operation after output A/D.图1-9是利用轴角模拟与数字量转换后再运算来转换成数字量输出同样将旋转变压器的输出绕组U s 和U c 分别和一对自耦变压器相接自耦变压器上有许多按照角度的正余弦函数变化的准确抽头将抽头上的输出量调整再进行隔离放大检测接入高精度A/D 转换电路后所得的值与一个固定电平判决电路的值相比较所得的两组以数字量形式输出接入DSP 专用电路计算出θ1−tan 输出角度数字量d旋转变压器输出采用跟踪反馈法的轴角编码原理212223跟踪反馈法原理工作的专用编码大规模集成电路RDC 的原理图如图1-10所示它是旋转变压器定子单相激磁转子正余弦绕组输出调幅信号频率与激磁电压相同幅值受转子转角θ调制的鉴幅型角度转换器件为了提高转换器的动态测角精度在控制电路中加入了一个积分环节考虑了可逆计数器后整个转换系统是II型伺服系统图1-10 跟踪反馈法轴角编码工作原理Fig.1-10 The principle of shaft encoding by means of tracking feedback method.跟踪反馈法轴角编码的工作原理为当交变激磁电压)()(ϕω+•=tSinUintU施加于旋转变压器定子绕组S1S3时旋转变压器转子从基准电气零位转动一机械角度θ此时转子的R1R3 正弦与R2R4余弦绕组的输出电压分别为)]()()([ϕωθϕωθϕωθ+×××+++××=tCosSindtdtSinCosUinKUs1.1-17)]()()([ϕωθϕωθϕωθ+×××+−+××=tCosCosdtdtSinSinUinKUc式中θ为旋转变压器的旋转轴角ω激磁角频率ϕ激磁初相角上式中第一项为旋转变压器理想输出信号而第二项是其角速度电压信号当旋转变压器静态工作时即0=dtdθ则式1.1-17变为)(ϕωθ+×××=tSinCosUinKUs1.1-18)(ϕωθ+×××=tSinSinUinKUc而RDC可以看作是一个数字随动系统可逆计数器的输出值φ为数字角输出高速正余弦乘法器高速精度补偿产生φSin 和φCos 反馈到高速乘法器分别与Us 和Uc 信号相乘经过高速正余弦乘法器的输出为)(ϕωφθ+××××=t Sin Sin Cos Uin K Usm1.1-19)(ϕωφθ+××××=t Sin Cos Sin Uin K Ucm再经过差分放大器上式之差为Usm Ucm Ud −=)(][ϕωφθφθ+××−××=t Sin Sin Cos Cos Sin Uin K )()(ϕωφθ+×−××=t Sin Sin Uin K1.1-20式1.1-20是鉴幅型转换器的一般表达式由于旋转变压器一般工作在同步转速以下的状态因此分析静态即可若将此时正弦Us 和余弦Uc 电压信号进行角位置编码输出由于误差信号Ud 受激磁载波调制必须解调后才能进一步处理将其和激磁电压同时引入相敏检测器产生一个与)(φθ−Sin 成正比的直流误差信号积分后作为高速宽动态VCO 的控制电压VCO 输出脉冲通过控制逻辑电路对可逆计数器计数使φ逐步趋近于θ系统平衡后在没有误差的情况下那么该角度值φ应该等于θ这是显而明了的虽然对U s 和U c 处理方法很多,但综合性能最优应用最广的转换方式当推跟踪反馈法小尺寸高频高精度双通道旋转变压器-轴角编码组件采用此方案1.4 国内外旋转变压器轴角编码组件的应用状况国内外现广泛应用旋转变压器轴角编码组件在军用装备中国外非常重视旋转变压器轴角编码组件的发展与应用定期交流信息逐步形成了以美国与俄罗斯法国为两大流派美国借助于半导体技术着重发展大规模编码集成电路芯片RDC 在这方面作了大量的研究主要通过电路的综合补偿使组件的电气精度不断提高从而满足系统的要求俄罗斯法国侧重于旋转变压器本身的研究借助于电磁基本原理对其电气误差作了深入的研究主要通过结构及绕组的变化使组件的电气精度不断提高也能满足系统的要求同时国外将新原理技术工艺及材料应用于军用装备整机中亦促进了旋转变压器轴角编码组件的发展国内这方面近期有了比较大的进步但是军用装备整机还是仿制为主因此组件的研究是十分必要的1.5 本文的主要内容及组织结构本文第二章介绍了双通道旋转变压器及轴角编码和组合的工作原理同时介绍了常见的双通道旋转变压器轴角编码组件工作的方案并且分析了其利弊在第三章中笔者分析了旋转变压器及跟踪反馈型轴角编码误差的数学模型第四章主要针对小尺寸高频双通道旋转变压器的误差及其轴角编码组件的误差进行了分析并对小尺寸高频双通道旋变编码组件的误差进行了补偿作出了具体的产品在第五章中对研究工作做了总结同时结合具体研究过程中的想法提出了对现有系统的改进意见。
1 概述轴角位置模数转换器(Resolver-Digital-Converter, RDC)是一个低成本具有12位分辨率的单片跟踪式轴角位置模数转换器主要应用有,马达控制、机床控制、机器人控制、过程控制、动力转向控制、集成启动/发电控制及电动车动力驱动控制1.1I/O接口Input: 差分模拟输入 sin/sinlo. Cos/coslo.Output:1)绝对位置和速度输出:并行和串行12-位数据增量编码器仿真输出(1024脉冲/转)可编程正旋振荡器输出(DDS)1.2主要技术指标1000RPS最大跟踪速率,12为分辨率可编程正旋振荡器输出(10、12、15、20KHz)角度跟踪精度可达22角分小尺寸:44脚- LQFP封装图中线圈A与线圈B互相垂直。
如果将线圈C输入正弦电压,并旋转线圈C,那么在线圈A与线圈B中将感应出两个电压,V A = KE C Sin θV B = KE C Cos θ where E C = E I Sinωt; K是旋转变压器的变比So thatV A = K E I Sinωt Sin θ (SIN)V B = K E I Sinωt Cos θ (COS)用MATLAB的SIMULIK模块构造出两信号的波形如下图所示意图2:调制后的高频SIN/COS波形图如果我们用 Va 乘以Cos φ,Vb 乘以Sin φ,并将它们在一个减误差放大器中相减,从而产生= K E I Sin ωt Sin θ Cos φ − K E I Sin ωt Cos θ Sin φ生角φ,使Ve 变成0。
基本上,我们会设计一个电路,此 图4:系统的设计框图 了实现输入信号的幅值匹配调整以及高频滤波。
见下图:V E = K E I Sin ωt Sin (θ −φ )我们会设计一个电路来产电路是一个带有相位感应检测器、积分器及电压控制型振荡器的闭环系统,它使Sin (θ −φ )趋向于零。
1 概述
轴角位置模数转换器(Resolver-Digital-Converter, RDC)是一个低成本具有12位分辨率的单片跟踪式轴角位置模数转换器
主要应用有,马达控制、机床控制、机器人控制、过程控制、动力转向控制、集成启动/发电控制及电动车动力驱动控制
1.1I/O接口
Input: 差分模拟输入 sin/sinlo. Cos/coslo.
Output:1)
绝对位置和速度输出:并行和串行12-位数据
增量编码器仿真输出(1024脉冲/转)
可编程正旋振荡器输出(DDS)
1.2主要技术指标
1000RPS最大跟踪速率,12为分辨率
可编程正旋振荡器输出(10、12、15、20KHz)
角度跟踪精度可达22角分
小尺寸:44脚- LQFP封装
图中线圈A与线圈B互相垂直。
如果将线圈C输入正弦电压,并旋转线圈C,那么在线圈A与线圈B中将感应出两个电压,
V A = KE C Sin θ
V B = KE C Cos θ where E C = E I Sinωt; K是旋转变压器的变比
So that
V A = K E I Sinωt Sin θ (SIN)
V B = K E I Sinωt Cos θ (COS)
用MATLAB的SIMULIK模块构造出两信号的波形如下图所示意
图2:调制后的高频SIN/COS波形图
如果我们用 Va 乘以Cos φ,Vb 乘以Sin φ,并将它们在一个减误差放大器中相减,从而产生= K E I Sin ωt Sin θ Cos φ − K E I Sin ωt Cos θ Sin φ
生角φ,使Ve 变成0。
基本上,我们会设计一个电路,此 图4:系统的设计框图 了实现输入信号的幅值匹配调整以及高频滤波。
见下图:
V E = K E I Sin ωt Sin (θ −φ )
我们会设计一个电路来产电路是一个带有相位感应检测器、积分器及电压控制型振荡器的闭环系统,它使Sin (θ −φ )趋向于零。
其数字输出,在一定的 精确度上,与旋转变压器轴的夹角大致相同。
图4是轴角位置模数转换器的框图。
1.4 几个主要电路的实现
输入buffer 电路:目的:为5:对应的PSPICE 仿真波形如图6
图5:输入BUFFER 电路
图6:仿真波形图
.4.2输出BUFFER 电路设计
,该电路中除了把双路差分信号转变成单路输出外
真波形如图8所示: 1如下图7所示意:滤波器为200K 在后面为了加强其驱动带负载的能力加了级推挽放大电路
图7: 输出BFFFER 电路设计
仿
图8 :输出BUFFER 电路的PSPICE 仿真波形图
1.4.3 sin/部分电路实现的功能表达如下:
ωt Cos θ Sin φ
定采用高速D/A 来实现此功能 位的速度高达250ns 的高速DA 芯片。
现如下图9 cos 乘法电路设计
本K E I Sin ωt Sin θ Cos φ − K E I Sin 经过查阅文献和参考相关资料,决主要芯片采用美国AD 公司的DAC312,为12具有单极性,双极性等多种工作方式。
原理公式如下:具体电路实
Iout Iout Vref
+=
Rref
图9:SIN/COS 高速乘法电路
入部分为sin ωt,再经过lpf (Low pass filter)
们就可以得到我们的数字式的解调电路。
所以我们设计的高速解调电路如下图所 电路如下10图:
本电路原理比路性能精度能否达到甚至系统能否稳定的关键
可以用LM339,实际应用中考虑输出电平兼容和转换速度以及 电路实现的思想基于全波整流。
需要注意的主要是此电路中电阻要精确电阻。
最
设计电路如下: 路设计如图12波形如图13。
在该电路中,数字输入部分为COS φ,如果输我示意。
我们实现的数字功能为: E*sin ωt *sin(θ -φ)*sin ωt =E/2*sin(θ -φ)-E/2*sin(θ -φ)*cos2ωt) 再经过滤波可得到 E*sin(θ-φ)项,
图10: 高速解调电路
1.4.4方向检测电路
较简单,但是却也是电电路之一:简单原理对输入端信号的敏感性我们准备选用NATIONAL SEMICONDUCTRORS 的高速器件LM161来实现。
图11 方向检测电路
1.4.5绝对值电路
本好是精确电阻排。
实现数字逻辑为:
电Vi
o =V ,仿真
图 12 绝对值电路
图 13 绝对值电路仿真波形图
用压频转换芯片vfc110来设计。
实现逻辑为: f= k vo ,vfc110是个多量程的压~4M 量程对应的输入端压控电源为0~10V 。
用其产生的信系统中的速度为带符号的2进制补码输出。
考虑到此,我们选用了一款双极性的1,它输入可以是-5~+5V ,输出为13位的2的补码。
其1.4.6压控震荡电路设计
选频转换芯片,我们选择0号结合前面的方向信号就可以触发CPLD 中的12位可逆计数器。
具体电路连接见附图
1.4.7 速度A/D 转换设计
此A/D 转换芯片:ADC1244msb 位为符号位,可以用来标识电机的正/反转,同时还具有自动校正误差功能
1.4.8 CPLD 的DDS 实现
pld 除了实现数字逻辑控制外还有一个很主要的作用是实现可遍程信号的合成。
按里面存储一个1024的SINA TABLE,按照这样计算,最
DS 的工作原理是以数控振荡器的方式产生频率、相位可控制的正弦波。
电路一般度/相位转换电路、D/A 转换器和低通
冲Fclk ,12位加法器将频率控制数据X 与累加寄存器输出的累加相的结果Y 送至累加寄存器的输入端。
累加寄存器一方面将在 这样就完成了一个周期,这个周期也就是DDS 信号的一频率周期。
,15,20,Y 取值为4096(12位),Fclk 取为别输出10k,12k,15k,20k 的可编程正弦信号输出。
们设计中由于考虑到片内资源(主要是FLIPFLOP 和 GATE 的数量)和本系统的及货源的情况我们选择了ALTETA 公司C 照常归思想我们需要一个在少需要1024*12个门,这就已经超过了altera 公司最大的型号epm7512(1万个门)。
所以我们设计的时候把sina table 外挂在一片高速度的扩展FLASH 里面。
DDS 实现的原理如下图14
图14:DDS 实现框图
D 包括基准时钟、频率累加器、相位累加器、幅滤波器(LPF )。
频率累加器对输入信号进行累加运算,产生频率控制数据X (frequency data 或相位步进量)。
相位累加器由N 位全加器和N 位累加寄存器级联而成,对代表频率的2进制码进行累加运算,是典型的反馈电路,产生累加结果Y 。
幅度/相位转换电路实质上是一个波形寄存器,以供查表使用。
读出的数据送入D/A 转换器和低通滤波器。
具体工作过程如下: 每来一个时钟脉位数据相加,把相加后上一时钟周期作用后所产生的新的相位数据反馈到加法器的输入端,以使加法器在下一时钟的作用下继续与频率控制数据X 相加;另一方面将这个值作为取样地址值送入幅度/相位转换电路(即图1中的波形存储器),幅度/相位转换电路根据这个地址输出相应的波形数据。
最后经D/A 转换器和低通滤波器将波形数据转换成所需要的模拟波形。
相位累加器在基准时钟的作用下,进行线性相位累加,当相位累加器加满量时就会产生一次溢出, DDS 输出信号的频率由下式给定: Fout=(X/Y) ×Fclk
所以在本设计中取X 分别为10,124.096MHZ ,则可以分
1.4.9 CPLD 的数字混合逻辑电平接口设计 我需求以及芯片供应商方面的价格和供货周期的MAX7000A 系列的产品EMP7512AE ,该芯片具有很好的性价比,是一款大众化芯片。
具有512个FLIPFLOP 和10000个GATE 。
但美中不足的是它是3.3V 工作的芯片,和MAX7000S 系列5V
工作的电平不同。
所以在应用中要注意和外围电路中
的电平匹配的问题。
EPM7512的输入通过配置,可以与5V兼容,但其输出为.3.3和2.5V逻辑,为此,我们把EPM7512的输出通过TI公司的3.3-5V电平转换芯片244进行了转换。
具体电路图见附图,外挂的FLASH为PLCC封装的64K*16BIT。
地址分配为8K-12K,看地址线连接关系可知道(A15 A14 A13 A12 A11 A10 A9 A8 A7 A6 A5 A4 A3 A2 A1 A0 对应为:0 0 1 0 X X X X X X X X X X X X)。