水母仿生
- 格式:pptx
- 大小:1.02 MB
- 文档页数:11
费斯托仿生水母结构费斯托仿生水母结构是一种模仿水母的设计结构,它能够模拟水母的游动和捕食方式。
这种结构的设计灵感来自于费斯托水母,一种生活在深海中的神奇生物。
仿生水母结构的设计目的是为了实现一种高效的游动方式,同时能够保持结构的稳定性和耐久性。
这种结构由一个中央的圆形顶部和伸出的触手组成。
触手上覆盖着柔软的细胞,这些细胞能够收缩和伸展,从而产生推进力。
仿生水母结构的中央部分由一个圆形的顶部构成,类似于水母的顶部。
这个顶部是由柔软而耐用的材料制成的,能够承受外界的压力和冲击。
在顶部的中央有一个孔,通过这个孔可以将水流引入结构内部。
水流通过顶部的孔进入结构内部后,会形成一个涡流,这个涡流会产生推进力,从而推动整个结构向前移动。
仿生水母结构的触手是由柔软的纤维组成的,这些纤维能够像水母的触手一样收缩和伸展。
触手上覆盖着细胞,这些细胞能够收缩和伸展,从而产生推进力。
当水流通过结构内部时,触手会收缩,从而推动整个结构向前移动。
当水流停止时,触手会伸展,从而保持结构的稳定性。
仿生水母结构的设计能够使结构具有高效的游动和捕食能力。
它能够通过调整触手的收缩和伸展来实现不同的游动方式,从而适应不同的环境和需求。
同时,这种结构还能够通过调整顶部的孔的大小和位置来控制水流的流动,从而实现更精确的游动和捕食。
费斯托仿生水母结构是一种模仿水母的设计结构,能够实现高效的游动和捕食能力。
它的设计灵感来自于费斯托水母,通过模仿水母的游动和捕食方式,实现了一种高效的结构设计。
这种结构具有稳定性和耐久性,能够适应不同的环境和需求。
通过调整触手的收缩和伸展以及顶部孔的大小和位置,可以实现不同的游动和捕食方式。
这种仿生设计为人类创造了一种全新的结构,拓宽了科学技术的应用领域。
海洋生物仿生学的例子
以下是 8 条关于海洋生物仿生学的例子:
1. 你知道吗,潜艇的设计灵感就来自于鲸鱼!鲸鱼那庞大的身躯能在海洋中自由穿梭,我们不也仿照它做出了潜艇嘛,能在深深的海底来去自如,这多酷啊!
2. 哎呀,那飞机的外形设计其实跟海鸥也有着密切关系呢!海鸥在空中翱翔的身姿那么优美,我们的飞机不也向它学习,从而能在天空中飞得又稳又快吗?
3. 嘿,你瞧那泳衣上的鲨鱼皮纹理设计,这可是仿照鲨鱼的皮肤来的呀!鲨鱼在水里游得那么快,我们穿上这种泳衣,不也能在水中更加敏捷了吗?
4. 哇哦,荷叶那出淤泥而不染的特性,竟然被用在了建筑物的自清洁表面上!就好像荷叶永远干净,我们的建筑也能保持整洁啦,这仿生学可真神奇啊!
5. 说起来,船底的防污涂料不就是借鉴了海豚的皮肤吗?海豚的皮肤能让它们免受海洋生物的附着,我们的船有了这种涂料不也能减少很多麻烦嘛?
6. 你想过没,那神奇的声呐系统其实跟蝙蝠的回声定位很像啊!蝙蝠能在黑暗中准确找到目标,我们利用声呐不也能探测深海的秘密嘛,多有意思!
7. 哎,章鱼那柔软的身体和灵活的触手,是不是也给了我们启发,让我们制造出了更灵活的机械臂呀!那简直像章鱼一样能在各种复杂环境中工作呢。
8. 可不是嘛,仿照水母的发光原理,我们都做出了能发光的材料呢!水母在黑暗中那么闪耀,我们的生活不也因为这而增添了很多光彩嘛!
我的观点结论就是:海洋生物仿生学真的太神奇啦,给我们的生活带来了太多的惊喜和改变!。

十大颇具创意的海洋动物仿生设计源于海洋动物形体特征的仿生设计有很多,科学家通过对特殊而又具有代表性海洋动物形体特征的分析与研究,寻找海洋动物独具的美感因素与合理适应大自然的奥秘所在,并将这些自然界中的合理因素运用仿生设计学引入到日常的设计与生活中。
下面是十大颇具创意的海洋动物仿生设计。
鱼形汽车研究人员从鱼类身上获得了灵感,将鱼类“避免碰撞”、“同排移动”和“靠近同伴”三种行为规则应用于驾驶操控上,开发了一种智能化概念汽车“EPORO”。
该技术模仿鱼群在前行时绕开障碍物的同时避免互相碰撞的活动模式,使得该款概念车能够在车流中穿梭自如。
和现在马路上带着噪音呼啸而过的汽车不同,当EPORO在马路上行驶时,会自动按照行进方向编组,同路线的汽车既互相跟随,又保持一个合理的间距,而且,当前方出现障碍物时,还会自动规避。
简言之,这是些既不会堵车,也不会撞车的汽车。
水中污染物的仿生机器鱼这种机器鱼体长约50厘米,高15厘米,宽12厘米,身上装备有探测传感器,可以自动监测河水中的多种污染物,如轮船泄漏的燃油或其它化学物等,并利用GPS装置将数据适时传给研究人员。
这种机器鱼是科学家们根据仿生学原理设计制造的,它们游动起来酷似真正的鲤鱼,身体在发动机的推动下来回摆动,并用鳍和尾来改变它们的游动方向,其游动速度可达每秒半米。
这些机器鱼充电一次就能在水中持续游动24小时。
机器鱼“嗅出”一片水域中的有害物质时,它们就通过wi-fi无线连接彼此交流数据,然后适时向研究人员和环保部门发出警报。
台湾生化实验大楼仿照鹦鹉螺外形设计鹦鹉螺贝壳是大自然最完美的形状之一。
自然界里,鹦鹉螺壳内部形成一连串相互连锁的完美螺旋对生规律、质地为珍珠质的小室,如此大自然奇迹的外壳里却隐藏着丑陋的头足类软体动物。
台湾生化实验大楼群由两幢大小互异、类似鹦鹉螺外壳的实验室大楼所组成。
两幢生化实验大楼内部为处理极端危险病毒研究的先进实验室,其外以象征完美形体与精密技术的外壳所包覆。
仿生学的例子大全1、苍蝇讨厌的苍蝇,仿制成功一种十分奇特的小型气体分析仪,试试被安装在宇宙飞船的座舱里,用来检测舱内气体的成分。
2、水母水母的顺风耳,仿照水母耳朵的结构和功能,设计了水母耳风暴预测仪,能提前15小时对风暴作出预报,对航海和渔业的安全都有重要意义。
3、源于“叶”的灵感3.1 叶形的启示相传春秋战国时代(公元前450-500年)的鲁国工匠鲁班,在上山伐木途中,手指被茅草划破,他仔细观察发现,原来茅草叶子两边长着锋利的锯齿,于是受到启发。
经反复实践,制成人类史上第一架带有锯齿的木工锯。
3.2 叶脉的启示浮水植物王莲有“水中花王”之称。
一个体重35kg 的人坐在上面也不会下沉。
原来王莲圆形叶片的直径可达1~2.5m,背面有许多相互交错的叶脉骨架结构,里面还有气室使得叶子稳定地浮在水面。
受叶脉支撑作用的启发,英国著名建筑师约瑟,以钢铁和玻璃为建材,设计了一座顶棚跨度很大的展览大厅──“水晶宫”,它既轻巧、雄伟又经济耐用,不仅成就了1851年的第一届世博会,也为近现代功能主义建筑构建了雏形。
3.3 叶序的启示德国波恩大学的科研人员发现,莲叶上有许多非常微小的绒毛和蜡质凸起物。
这种粗糙的叶片是干净的,而表面光滑的叶片反而需要清洗。
模仿莲叶的自净原理,人们开发出具有防污功能的自净涂层产品,其表面会形成类似茶叶的凹凸形貌,构筑一层疏水层。
这样一来,灰尘颗粒只好在涂层表面“悬空而立”,并最终在风雨冲刷下“一扫而净”。
此外,叶面形状也启迪了人们的思维。
椰子树很高,叶片巨大,但每遇飓风和暴雨也很少被折断。
研究发现,椰子叶面呈“之”字形,可以承受更大的压力。
据此,建筑师设计出了结构薄、面积大的楼房顶棚、薄状石棉板等。
4、源于“茎”的灵感4.1 节与节间的启示禾本科植物竹子,其竹节处有横隔相连,与竹身构成一个整体,这对中空细长的竹竿的刚度和稳定性,可以协调变形,共同参与抗弯作用,这对于中空细长的竹竿的刚度和稳定性很有意义。
一种仿生水母机器人的实现作者:高振帮李志刚梁拥成崔秀芳来源:《科技视界》2018年第06期【摘要】随着海洋保护与水下侦查的需要,水下机器人越来越受到人们的重视,可以承担水下环境监测与生物生长鱼群迁移等等任务。
而水母是一种柔性生物,仅凭借对腔体大小改变可实现便捷的转向和定轨迹的行程行进。
但是目前的仿水母机器人游动稳定性差、方向不易控制。
因此,需要一种新的技术方案以解决上述问题。
【关键词】水母机器人;稳定性;技术方案中图分类号:TB333 文献识别码:A 文章编号: 2095-2457(2018)06-0262-002【Abstract】With the needs of marine protection and underwater detection, underwater robots have received more and more attention from people, and they can assume tasks such as underwater environment monitoring and biological growth fish migration. The jellyfish is a kind of flexible creature, and it can achieve convenient steering and fixed track travel only by changing the size of the chamber. However, the current swimming robots have poor stability and difficulty to control their orientation. Therefore, a new technical solution is needed to solve the above problems.【Key words】Jellyfish robot; Stability; Technical solutions0 课题的提出及意义“Machine jellyfish”是festo公司[1-3]设计并研发的氦气动能源的两栖水母类机器人成果,旨在海况和空航领域,”Cyro”是美国Virginia Tech提出和开发一种依靠8块电机驱动8个机械臂的类水母“软”的机械臂型陆用机械水母,已在军民行业展开适当的范围的调试与运用。
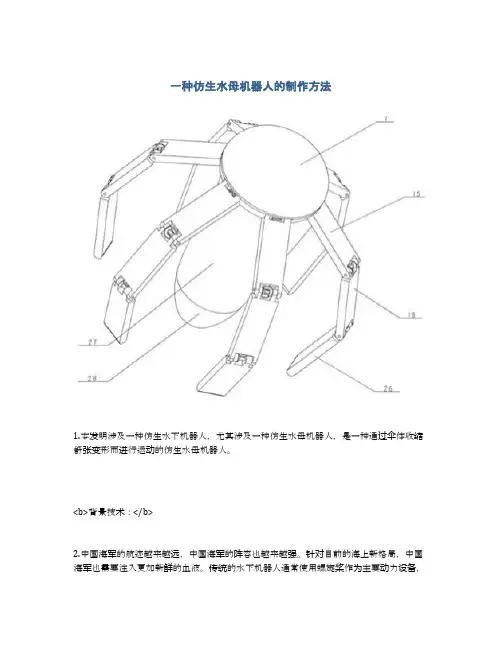
一种仿生水母机器人的制作方法1.本发明涉及一种仿生水下机器人,尤其涉及一种仿生水母机器人,是一种通过伞体收缩舒张变形而进行运动的仿生水母机器人。
<b>背景技术:</b>2.中国海军的航迹越来越远,中国海军的阵容也越来越强。
针对目前的海上新格局,中国海军也需要注入更加新鲜的血液。
传统的水下机器人通常使用螺旋桨作为主要动力设备,然而螺旋桨运行过程中会产生巨大的噪声,从而很容易被水下监听设备发现。
此外,以螺旋桨为动力设备的水下机器人能耗大,很难实现长航时水下作业。
3.随着水下机器人技术的发展,水下机器人为海洋生物的研究者带来了极大的便利,也使得研究者们可以通过使用水下机器人对海洋生物进行更加深入的研究。
然而使用传统的水下机器人进行科学研究的时候,其会对水下生物造成惊扰,从而无法观察到水下生物最真实的生活状态。
此为,高速运转的螺旋桨很容易对水下生物造成伤害。
4.水下机器人对于考古研究也具有重要的意义。
由于地壳变迁,有许多古老的国度沉入茫茫的大海,古老的文化也随之埋入深海。
此外,海底也存有各个时代的各类沉船,其中也蕴含着许多历史的秘密。
使用传统水下机器人进行勘探的时候,容易造成对文物的损坏。
<b>技术实现要素:</b>5.本发明的目的在于针对现有技术的不足,提供一种仿生水母机器人,具有噪音小、隐蔽性好、能耗低等特点。
6.本发明的目的是这样实现的:包括头部部分、伞体部分、能源部分,头部部分包括相互连接的外壳上部分和外壳下部分、固定板、单片机、环境感知模块、电源一,环境感知模块固定于固定板上,固定板安装于外壳上部分,所述电源一安装于外壳下部分的凹槽内,所述单片机安装于硬质外壳下部分;伞体部分包括与外壳下部分下端连接的固定架、等间距设置在固定架圆周方向上的六个伞体骨架机构、设置在伞体骨架外侧的弹性薄膜,每个伞体骨架机构包括设置在固定架上的舵机、三节骨架,相邻骨架通过齿轮机构以及主轴进行连接;能源部分包括与外壳下部分连接的硬质外壳、从下方插入硬质外壳内的固定内壳、设置在固定内壳内的电源二。
机械原理课程设计设计说明书设计题目:仿生水母机电学院:08-713班小组成员:2008071315张玉涛2008071329刘琦2008071302高爽专业:机械设计制造及其自动化指导老师:***2010年7月10日哈尔滨工程大学目录1.设计简介......................................................11.1设计题目......................................................11.2设计目的......................................................11.3水母的生物模型研究 (1)1.4国内外研究成果 (2)2.设计方案 (4)2.1外部动力传递部分设计 (4)2.2主动力部分设计 (4)2.2.1方案一 (4)2.2.2方案二 (5)2.2.3方案三 (6)2.2.4方案四 (7)3.分析总结 (7)4.心得体会 (8)5.设计者及机构模型图片 (9)机械原理课程设计报告一、设计简介:1、题目:《仿生水母》2、设计目的:I.我们国家海域辽阔,防御和侦察起来比较困难。
可将仿生水母安装上传感器或微型摄像头并将其投放到远海,进行侦查监控工作,并通过卫星将数据及时传送到陆地指挥部。
II.在仿生水母身上还可以装上次声波探测器,用于预报海啸、台风等自然灾害的到来。
III.在仿生水母上面加装搜索、救援装置,发生灾难时可进行水下搜救工作。
IV.目前常规动力推进存在噪声大、效率低等缺陷,可在此基础上进一步研究访水母动力推进器。
3、水母的生物模型研究:水母,是海洋中重要的大型浮游生物。
水母寿命很短,平均只有数个月的生命。
水母是无脊椎动物,属于腔肠动物门中的一员。
全世界的海洋中有超过两百种的水母,它们分布于全球各地的水域里。
水母身体外形像一把透明伞,伞状体直径有大有小,大水母的伞状体直径可达2米。
仿生机械水母课程设计一、课程目标知识目标:1. 学生能理解仿生学的概念,了解仿生机械的基本原理及其在现实生活中的应用。
2. 学生能够掌握水母的基本结构、生理特征及其在海洋生态系统中的作用。
3. 学生能够描述仿生机械水母的设计理念、组成部分和工作原理。
技能目标:1. 学生能够运用所学的知识,分析并设计简单的仿生机械结构。
2. 学生通过小组合作,培养沟通协作能力和团队精神,提高解决问题的能力。
3. 学生能够运用科学探究方法,进行观察、实验和数据分析,培养科学思维能力。
情感态度价值观目标:1. 学生对仿生学产生浓厚的兴趣,激发探索自然科学的好奇心和求知欲。
2. 学生认识到仿生技术在可持续发展中的重要性,增强环保意识和创新意识。
3. 学生在小组合作中,学会尊重他人意见,培养团结互助的品质。
本课程针对年级:五年级课程性质:科学探究课程学生特点:五年级学生对新鲜事物充满好奇心,具备一定的观察能力和动手能力,善于合作与交流。
教学要求:结合学生的特点,注重启发式教学,引导学生主动探究,关注学生的个体差异,鼓励学生发挥创造力。
通过课程学习,使学生在知识、技能和情感态度价值观方面得到全面发展。
二、教学内容1. 引入仿生学概念- 课本章节:第三章“奇妙的仿生世界”- 内容:介绍仿生学的定义、发展历程及其在科技领域的应用。
2. 水母的基本知识- 课本章节:第五章“海洋生物——水母”- 内容:水母的结构、生理特征、生活习性及其在海洋生态系统中的作用。
3. 仿生机械水母设计原理- 课本章节:第八章“仿生技术在机器人领域的应用”- 内容:介绍仿生机械水母的设计理念、组成部分和工作原理。
4. 制作简单的仿生机械水母- 课本章节:实践活动“动手制作仿生机械水母”- 内容:指导学生动手制作简易的仿生机械水母,培养学生动手实践和创新能力。
5. 科学探究与实验分析- 课本章节:科学探究方法- 内容:组织学生进行观察、实验,收集数据并进行分析,培养学生科学思维。
一种仿生水母机器人的实现【】With the needs of marine protection and underwater detection, underwater robots have received more and more attention from people, and they can assume tasks such as underwater environment monitoring and biological growth fish migration. The jellyfish is a kind of flexible creature, and it can achieve convenient steering and fixed track travel only by changing the size of the chamber. However, the current swimming robots have poor stability and difficulty to control their orientation. Therefore,a new technical solution is needed to solve the above problems.0 ?n题的提出及意义“Machine jellyfish”是festo公司[1-3]设计并研发的氦气动能源的两栖水母类机器人成果,旨在海况和空航领域,”Cyro”是美国Virginia Tech提出和开发一种依靠8块电机驱动8个机械臂的类水母“软”的机械臂型陆用机械水母,已在军民行业展开适当的范围的调试与运用。
国内哈工大机器人组开展的多连杆仿生器水母机构的初步研究,取得部分效力,可开展例如缓水流与急流复杂交变的模拟海况的试验探索。
[4-6]本文拟提出一种克服冗余与欠驱驱动、变限胞法等缺点的新奇驱动形式器。