简单串联机器人ADAMS仿真
- 格式:doc
- 大小:1.87 MB
- 文档页数:11
空间二连杆机器人的动力学建模及其动态过程仿真作者:td一引言1.机器人机械臂的运动学与动力学分析方法目录空间二连杆机器人的动力学建模 (1)及其动态过程仿真 (1)作者:td (1)一引言 (1)1.1用户界面模块(ADAMS/View) (4)1.2求解器模块(ADAMS/Solver) (5)1.3后处理模块(ADAMS/PostProcessor) (6)二.空间二连杆机器人adams建模仿真 (6)2.1空间二连杆串联机器人 (6)在ADAMS中用长方形连杆模拟机械臂,对两自由度的机械臂分别进行运动学分析动力学分析。
(6)2.1.1运动学分析 (6)2.1.2运动学分析 (9)机器人的运动学和动力学既包含有一般机械的运动学、动力学内容,又反映了机器人的独特内容。
工业机器人的运动学主要讨论了运动学的正问题和逆问题。
假设一个构型已知的机器人,即它的所有连杆长度和关节角度()1q t ,()2q t ,()3q t …()n q t ,…都是已知的,其中n 为自由度数,那么计算机器人末端执行器相对于参考坐标系的位姿就称为运动学的正问题分析。
换言之,如果已知机器人所有的关节变量,用正运动学方程就能计算任一瞬间机器人的位姿。
然而,如果希望机器人的末端执行器到达一个期望的位姿,就必须要知道机器人操作臂每一个连杆的几何参数和所有关节的角矢量()12,,T n q q q q =⋅⋅⋅利用操作臂连杆几何参数和末端执行器期望的位姿来求解关节角矢量是运动学逆问题。
运动学正问题可以利用齐次变换法来求解。
设i 杆坐标系相对于基座坐标系的位姿齐次变换矩阵是b i T ,则1231b i n n T A A A A A -=⋅⋅⋅⋅⋅⋅ ()11-式中i A 为i 杆坐标系相对于1i -杆坐标系的坐标变换矩阵。
相对于正运动学方程,机器人逆运动学方程显得更为重要。
由于按给定末端执行器的位姿求解关节变量是在关节空间中进行非线性方程的求解,其中涉及多值性和奇异现象,因此,这一逆问题成为机器人运动学中的一个重要内容。


一.ADAMS软件简介 (2)1.1ADAMS软件概述 (2)1.2用户界面模块(ADAMS/View) (3)1.3求解器模块(ADAMS/Solver) (5)1.4后处理模块(ADAMS/PostProcessor) (6)1.5控制模块(ADAMS/Controls) (8)二.典型机器人虚拟实验 (9)2.1串联机器人 (9)2.1.1 运动学分析 (9)2.1.2 动力学分析 (14)2.1.3 轨迹规划 (17)2.1.4 基于ADAMS和MATLAB的联合运动控制 (22)一.ADAMS软件简介虚拟样机仿真分析软件ADAMS(Automatic Dynamic Analysis of Mechanical Systems)是对机械系统的运动学与动力学进行仿真的商用软件,由美国MDI (Mechnical Dynamics Inc.)开发,在经历了12个版本后,被美国MSC公司收购。
ADAMS集建模、计算和后处理于一体,ADAMS有许多个模块组成,基本模块是View模块和Postprocess模块,通常的机械系统都可以用这两个模块来完成,另外在ADAMS中还针对专业领域而单独开发的一些专用模块和嵌入模块,例如专业模块包括汽车模块ADAMS/Car、发动机模块ADAMS/Engine、火车模块ADAMS/Rail、飞机模块ADAMS/Aircraft等;嵌入模块如振动模块ADAMS/Vibration、耐久性模块ADAMS/Durability、液压模块ADAMS/Hydraulic、控制模块ADAMS/Control和柔性体模块ADAMS/AutoFlex等[3]。
1.1ADAMS软件概述ADAMS是以计算多体系统动力学(Computational Dynamics of Multibody Systems)为基础,包含多个专业模块和专业领域的虚拟样机开发系统软件,利用它可以建立复杂机械系统的运动学和动力学模型,其模型可以是刚体的,也可以是柔性体,以及刚柔混合体模型。
基于ADAMS的多自由度机器人汽车天窗检测运动学仿真摘要:汽车天窗的密闭性是研究汽车天窗首要考虑的问题,如今机器人检测渐渐地代替了人的检测工作。
对于多自由度串联机器人来说,借助ADAMS机械系统动态仿真分析软件,可以大大简化计算工作,机器人的各运动学与动力学性能也可以通过仿真动画和数据图表直观地展现出来。
本文以Es165d型6自由度工业机器人为原型,采用 ADAMS仿真软件建立了该机器人的虚拟样机并进行了运动学仿真研究。
1前言1.1汽车天窗简介本文中用到的汽车天窗检测机械手即机械手上安装传感器,可以将安装好的汽车天窗放置在检测位置(检测点分布如下图1所示)。
让其在工作区域内进行运动,从而实现每个点的检测,但是机器手是怎样完成分布点的检测的,这就要对机械手运动进行轨迹规划。
由于成品成本太高,故需要先研究机器人的运动学,然后利用仿真软件进行仿真。
图1 检测点的分布1.2 传感器简介我们知道自动检测系统的重要元件是传感器,传感器性能的好坏直接影响整个检测系统的性能。
传感器的合格与否是由传感器检测系统通过检测传感器的性能指标来判断的,拥有高精度和高可靠性的传感器检测系统是从事传感器生产和经营企业一个重要的设备。
工作流程为下图:图2 传感器工作流程图本传感器PY-2-C-010-XL0202的用途有检验距离、尺寸控制、转速与速度控制、计数及控制检测异常等,其功能是检验距离。
2.机器人运动学机器人运动学的重点是研究手部的位姿和运动,一是根据机器人的各关节的转角或位移推算出机器人末端执行器的位姿,从运动学角度讲,即运动学正问题;二是根据机器人末端位姿计算出各个关节各自的转角或位移,即运动学逆问题。
机器人具体参数,见下表1。
根据这些参数计算机器人正逆运动学,这里就不具体的阐述解决正逆运动学的方法。
表1机器人参数3.ADAMS的主要工作模块3.1 ADAMS 简介ADAMS(全称Automatic dynamic analysis of mechanical systems)提供强大的建模仿真环境,能够对各种机械系统进行建模、仿真和分析,与其他CAD/CAE 软件相比,具有十分强大的运动学和动力学分析功能。
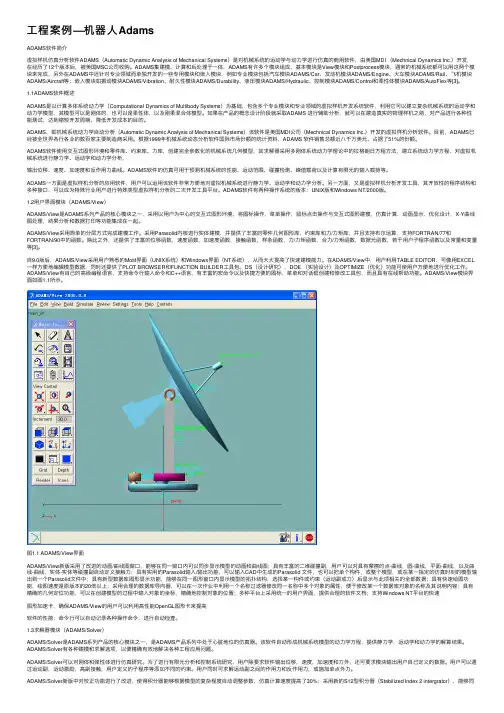
⼯程案例—机器⼈AdamsADAMS软件简介虚拟样机仿真分析软件ADAMS(Automatic Dynamic Analysis of Mechanical Systems)是对机械系统的运动学与动⼒学进⾏仿真的商⽤软件,由美国MDI (Mechnical Dynamics Inc.)开发,在经历了12个版本后,被美国MSC公司收购。
ADAMS集建模、计算和后处理于⼀体,ADAMS有许多个模块组成,基本模块是View模块和Postprocess模块,通常的机械系统都可以⽤这两个模块来完成,另外在ADAMS中还针对专业领域⽽单独开发的⼀些专⽤模块和嵌⼊模块,例如专业模块包括汽车模块ADAMS/Car、发动机模块ADAMS/Engine、⽕车模块ADAMS/Rail、飞机模块ADAMS/Aircraft等;嵌⼊模块如振动模块ADAMS/Vibration、耐久性模块ADAMS/Durability、液压模块ADAMS/Hydraulic、控制模块ADAMS/Control和柔性体模块ADAMS/AutoFlex等[3]。
1.1ADAMS软件概述ADAMS是以计算多体系统动⼒学(Computational Dynamics of Multibody Systems)为基础,包含多个专业模块和专业领域的虚拟样机开发系统软件,利⽤它可以建⽴复杂机械系统的运动学和动⼒学模型,其模型可以是刚体的,也可以是柔性体,以及刚柔混合体模型。
如果在产品的概念设计阶段就采取ADAMS 进⾏辅助分析,就可以在建造真实的物理样机之前,对产品进⾏各种性能测试,达到缩短开发周期、降低开发成本的⽬的。
ADAMS,即机械系统动⼒学⾃动分析(Automatic Dynamic Analysis of Mechanical Systems)该软件是美国MDI公司(Mechnical Dynamics Inc.)开发的虚拟样机分析软件。
⽬前,ADAMS已经被全世界各⾏各业的数百家主要制造商采⽤。
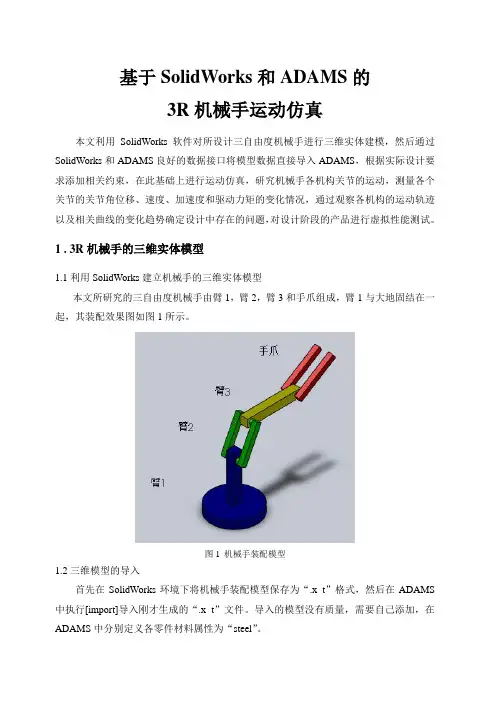
基于SolidWorks和ADAMS的3R机械手运动仿真本文利用SolidWorks软件对所设计三自由度机械手进行三维实体建模,然后通过SolidWorks和ADAMS良好的数据接口将模型数据直接导入ADAMS,根据实际设计要求添加相关约束,在此基础上进行运动仿真,研究机械手各机构关节的运动,测量各个关节的关节角位移、速度、加速度和驱动力矩的变化情况,通过观察各机构的运动轨迹以及相关曲线的变化趋势确定设计中存在的问题,对设计阶段的产品进行虚拟性能测试。
1 . 3R机械手的三维实体模型1.1利用SolidWorks建立机械手的三维实体模型本文所研究的三自由度机械手由臂1,臂2,臂3和手爪组成,臂1与大地固结在一起,其装配效果图如图1所示。
图1 机械手装配模型1.2三维模型的导入首先在SolidWorks环境下将机械手装配模型保存为“.x_t”格式,然后在ADAMS 中执行[import]导入刚才生成的“.x_t”文件。
导入的模型没有质量,需要自己添加,在ADAMS中分别定义各零件材料属性为“steel”。
2 . ADAMS运动仿真机械手在运动过程中要尽量平滑、平稳,否则会产生机械部件的磨损加剧,并导致机械手的振动和冲击。
因此在仿真过程中测量各个关节的关节角位移、速度、角加速度和驱动力矩的变化情况。
将模型各零部件导入ADAMS软件中后,各个构件之间还没有任何的约束,模型只是提供了各构件的初始位置。
本机械手两两相邻的构件构成的三个关节都是转动关节,均定义为旋转副,底座与大地之间定义为固定副。
添加完约束后的模型如图2所示。
图2 ADAMS环境下机械手仿真模型本文为机械手设置运动路径,已知路径求解各关节的驱动和力矩和转角运动情况。
设图中球的运动角速度如下图3:图3 球的运动角速度设定添加一个运动平面,设定机械手完成上料过程,现设路径如下图4,图4 机械手的运动轨迹至此建立起了机械手完整仿真模型,然后进行5s、50步的仿真。

编号:毕业设计(论文)说明书题目:基于ADAMS和MATLAB自行车机器人圆周运动仿真研究学院:机电工程学院专业:机械设计制造及其自动化学生姓名:学号:指导教师单位:机电工程学院姓名:职称:副教授题目类型:☐理论研究☐实验研究☐工程设计☑工程技术研究2014年5月28日摘要自行车是我们日常很常见的交通工具,自行车机器人是在自行车的基础上,加上自动控制系统来达到不需要人为控制的自行车,简单的说它就是把自行车和机器人结合起来的一种机器。
在驱动设备的驱动下,它可以通过它的控制器进行控制自主完成运动。
我们都知道,自行车主要通过它的车轮子和地面间的摩擦力来运动,地面与车轮的接触跟点接触差不多,所以他的的平衡动力学模型是相当的复杂的。
因为机械系统的物理样机和动力学模型建立起来太过麻烦,而且成本很高。
所以在文中我们要用到虚拟样机,虚拟样机技术的好处在于不用建立物理样机,只需要用三维建模软件建立好几何模型,再给模型加上合理的约束、驱动力矩、质量属性等必要因素,这样就能简单便捷地到了我们想要的模型,大大减少了我们的工作量,使得研究起来更简单。
另外,结合Matlab软件进行联合仿真,这样一来,整个联合仿真过程就显得更加的简单了。
得助于这些软件,这次的研究联合仿真运动控制的成本和时间都节约了很多。
本文主要研究自行车机器人基于虚拟样机的圆周运动的平衡控制。
具体步骤如下;首先用所学软件建立它的几何模型。
文中本人使用的是PRO/E建立自行车机器人的三维模型。
然后装配好的自行车机器人模型保存为T_X文件以方便它导入到ADAMS2012,紧接着在动力学软件ADAMS2012中加上必要的属性从而得到带着动力学模型的机械模型。
再然后把课本学到是控制工程的思想拿出来运用,并且结合数学软件Matlab的Simulink模块进行联合仿真,实现了自行车的圆周运动任务。
关键词:PRO/E;Simulink;ADAMS ; PID控制;圆周运动;自行车机器人AbstractBicycle is our daily common means of transportation,The bicycle robots on the basis of the bike and combineding with automatic control system to achieve not need manual controling.Simply say it is a machine combines with the bicycle and robot.By the driving of the driving device, it can be done by the controller to control the independent movement.As we all know, bicycle mainly move by the friction which between the ground and its wheels.The contact of the ground and wheels is similar to point contact.So the balance of his dynamic model is quite complicated.Since the mechanical system dynamic model of physical prototype and built up too much trouble And the cost is very high.So in this paper we use virtual prototype,The advantages of virtual prototyping technology is not set up the physical prototype,it Only need to create a geometric model with three dimensional modeling software.Then added to the model of reasonable constraint, driving moment, necessary factors such as quality attributes.So you can simple and easy to have the model waht we want , greatly reducing the workload of us,It is more easy to make research.In addition, because of the combined simulation of Matlab software ,so the simulation process is more simple.To aid in the software, this study combined simulation movement control cost and time saving a lot.This paper mainly studies bicycle robot based on virtual prototype of the balance of the circular motion control,Specific steps are as follows,First of all use the software we have learn to establish its geometric model.In this paper, I use PRO/E set up bicycle 3 d model of the robot.Then bicycle assembly robot model is saved as a T_X documents for import it into ADAMS2012.Then add the necessary property in the dynamics software ADAMS2012 with a mechanical model of dynamic model is obtained.Then take out your the thinking of the control engineering you have learn to application.And combined with the mathematical software Matlab Simulink module for combined simulation, realize the circular motion of bicycle task..Keywords:PRO/E ;Simulink ; ADAMS; PID control; circling motion;bicycle robot目录摘要 (1)Abstract (2)目录 (3)引言 (4)1 绪论 (5)1.1 自行车机器人概述 (5)1.2 三维软件PRO/E软件的简介 (8)1.3 虚拟样机技术概况 (9)1.4 动力学软件ADAMS简介 (10)1.5 控制工程中的PID控制概述 (10)1.6 数学软件Matlab/Simulink简介 (11)1.7 课题背景及设计任务 (12)2 自行车机器人的建模 (13)2.1 运用三维软件PRO/E对自行车机器人进行几何实体建模 (13)2.2 运用动力学软件ADAMS对自行车机器人进行虚拟样机建模 (20)3 ADAMS和MATLAB联合起来对自行车机器人仿真 (24)3.1 自行车机器人动态平衡原理 (24)3.2 控制策略及控制器的设计 (24)3.3 联合仿真调整PID参数 (27)4 自行车机器人回转运动特性分析 (30)4.1 无干扰力下自行车机器人的圆周运动特性 (30)4.2 有干扰力的自行车机器人的圆周运动特性 (33)5 结论 (35)谢辞 (36)参考文献 (37)引言自行车机器人是人们提出来的一种比较新型的智能交通工具或者说是运输工具,它运用了机器人的智能,还有自行车的简单,将这两者巧妙结合,在机器人研究领域是一种新的概念。
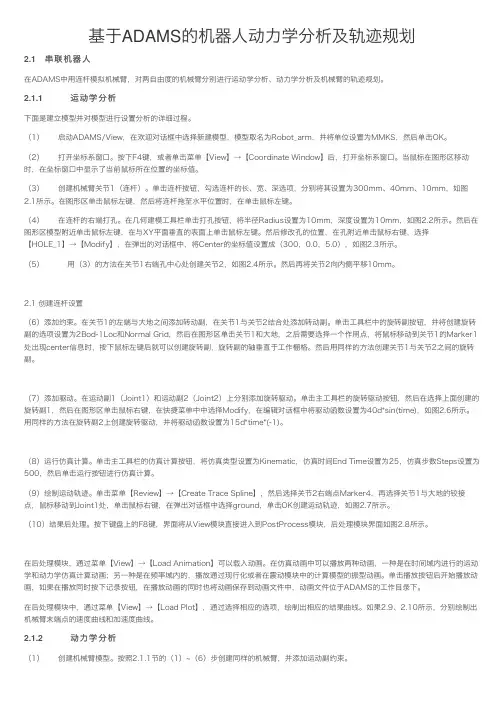
基于ADAMS的机器⼈动⼒学分析及轨迹规划2.1 串联机器⼈在ADAMS中⽤连杆模拟机械臂,对两⾃由度的机械臂分别进⾏运动学分析、动⼒学分析及机械臂的轨迹规划。
2.1.1 运动学分析下⾯是建⽴模型并对模型进⾏设置分析的详细过程。
(1) 启动ADAMS/View,在欢迎对话框中选择新建模型,模型取名为Robot_arm,并将单位设置为MMKS,然后单击OK。
(2) 打开坐标系窗⼝。
按下F4键,或者单击菜单【View】→【Coordinate Window】后,打开坐标系窗⼝。
当⿏标在图形区移动时,在坐标窗⼝中显⽰了当前⿏标所在位置的坐标值。
(3) 创建机械臂关节1(连杆)。
单击连杆按钮,勾选连杆的长、宽、深选项,分别将其设置为300mm、40mm、10mm,如图2.1所⽰。
在图形区单击⿏标左键,然后将连杆拖⾄⽔平位置时,在单击⿏标左键。
(4) 在连杆的右端打孔。
在⼏何建模⼯具栏单击打孔按钮,将半径Radius设置为10mm,深度设置为10mm,如图2.2所⽰。
然后在图形区模型附近单击⿏标左键,在与XY平⾯垂直的表⾯上单击⿏标左键。
然后修改孔的位置,在孔附近单击⿏标右键,选择【HOLE_1】→【Modify】,在弹出的对话框中,将Center的坐标值设置成(300,0.0,5.0),如图2.3所⽰。
(5) ⽤(3)的⽅法在关节1右端孔中⼼处创建关节2,如图2.4所⽰。
然后再将关节2向内侧平移10mm。
2.1 创建连杆设置(6)添加约束。
在关节1的左端与⼤地之间添加转动副,在关节1与关节2结合处添加转动副。
单击⼯具栏中的旋转副按钮,并将创建旋转副的选项设置为2Bod-1Loc和Normal Grid,然后在图形区单击关节1和⼤地,之后需要选择⼀个作⽤点,将⿏标移动到关节1的Marker1处出现center信息时,按下⿏标左键后就可以创建旋转副,旋转副的轴垂直于⼯作栅格。
然后⽤同样的⽅法创建关节1与关节2之间的旋转副。
机器人设计与仿真基于Adams与Matlab的案例分析与实现机器人设计与仿真是现代机器人工程领域的核心内容。
这个系列课程旨在帮助学习者掌握使用Adams和Matlab工具进行机器人设计、建模、控制算法开发和仿真分析的技能。
通过理论讲解和实践案例分析,学习者将了解机器人设计的基本原理和方法,并学会将其应用于实际机器人项目中。
课程共分为:基础篇以机械结构中常见机构为仿真示例,其中包含了平面四杆机构、凸轮机构、滑轮组、带传动、齿轮传动等,讲解了Adams/View的操作技巧和实战运用。
学员可:1、掌握Adams/View仿真基本流程。
2、掌握机械结构中常见机构的工作原理。
3、熟练Adams/View在机械系统仿真时常用模块及功能。
4、掌握在Adams中建立柔性体的流程。
5、熟悉Adams和MATLAB机电联合仿真技巧。
强化篇结合串联机器人、并联机器人、特种机器人及机器人控制系统的相关理论知识,运用MATLAB及Adams软件的编程和动力学仿真的强大功能,快速入门机器人领域。
学员可:1、熟悉机器人相关理论知识;2、掌握机器人基础性分析流程3、掌握MATLAB和Adams软件联合验证仿真以串联机器人作为机器人领域的入门,本小节主要以串联机器人的运动学建模、雅可比矩阵及奇异性分析、工作空间分析、轨迹规划及动力学分析为核心内容,通过理论建模,MATLAB编程计算,Adams仿真求解验证的方式,帮助各位学员更加深入理解机器人的基础理论知识。
以并联机器人中两种常见机器人(Delta、Stewart)为主要研究对象,讲解了并联机器人的基础性理论知识和仿真流程,同时,对Stewart平台通过MATLAB编程的方式进行了结构优化,通过Adams的仿真验证了优化结果。
简介特种机器人的发展状况,以四足机器人为研究对象,对其进行了运动学分析和关节空间轨迹规划,在通过MATLAB和Adams联合仿真的方式实现了四足机器人的行走。
Matlab与adams联合仿真设置1 模型设置 (2)2 运动副设置 (3)3 驱动与力设置 (4)4 检验设置是否正确 (7)5 Adams中与Matlab联合仿真的设置 (8)6 Matlab中与Adams联合仿真的设置 (12)7 联合仿真结果显示 (14)1 模型设置在soildworks建好四足整体模型,开始时做一个简化版的模型就可以了,另存为.x_t格式。
打开adams,点击文件->导入,在文件类型中选择“Parasoild”,双击“读取文件”空白处,打开选取文件界面,找到保存的四足模型,选择。
在模型名称的空白栏处右击,选择模型->创建,命名为“ghost”。
点击确定(图1.1)。
读取的文件目录中不要出现中文,否则会出现错误。
(图1.1)(图1.2)导入后的模型显示如图1.2。
点击界面右下角的球形图标,将模型转化为实体。
(图1.3。
倒数第四个)点击界面左上的设置->单位,将长度量纲改为毫米。
点击设置->重力,将重力设置为Y轴方向-9806.65。
点击界面左侧框图浏览->物体的左侧加号,出现模型各个部件的名称(图1.4)。
由于将模型从soildworks导入adams中时会损失质量信息,接下来将设置每个部件的质量。
双击某一部件,弹出设置界面(图1.5),在“定义质量方式”中选择“几何形状和密度”,随后设置密度。
由于实际中四足的腿的质量很小,大部分质量都集中在身体的铝架上,所以将腿部结构的的密度设为(200.0(kg/meter**3)),将身体部分的密度设为(1200.0(kg/meter**3))(图1.5)(图1.4)逐个双击部件设置密度信息。
完成后可在某个部件上右击,选择信息,查看该部件的信息(图1.6)。
(图1.6)统计质量信息如下:小腿长:0.0435kg*4 、小腿短:0.0252kg*4、大腿0.0132kg*8身体:5.79kg.总质量:6.18kg。
机械系统动力学
简化串联机器人的运动学与动力学仿真分析
学院:机械工程学院
专业:机械设计制造
及其自动化
学生姓名:
学号:
指导教师:
完成日期: 2015.01.09
摘要
在机器人研究中,串联机器人研究得较为成熟,其具有结构简单、成本低、控制简单、运动空间大等优点,已成功应用于很多领域。
本文在ADAMS 中用连杆模拟两自由度的串联机器人(机械臂),对其分别进行运动学分析、动力学分析。
得出该机构在给出工作条件下的位移、速度、加速度曲线和关节末端的运动轨迹。
关键词:机器人;ADAMS;曲线;轨迹
一、ADAMS软件简介
ADAMS,即机械系统动力学自动分析(Automatic Dynamic Analysis of Mechanical Systems),该软件是美国MDI公司(Mechanical Dynamics Inc.) (现已并入美国MSC公司)开发的虚拟样机分析软件。
目前,ADAMS已经被全世界各行各业的数百家主要制造商采用。
ADAMS软件使用交互式图形环境和零件库、约束库、力库,创建完全参数化的机械系统几何模型,其求解器采用多刚体系统动力学理论中的拉格朗日方程方法,建立系统动力学方程,对虚拟机械系统进行静力学、运动学和动力学分析,输出位移、速度、加速度和反作用力曲线。
ADAMS软件的仿真可用于预测机械系统的性能、运动范围、碰撞检测、峰值载荷以及计算有限元的输入载荷等。
二、简化串联机器人的运动学仿真
(1)启动ADAMS/View。
在欢迎对话框中选择新建模型,模型取名为robot,并将单位设置为MMKS,然后单击OK。
(2)打开坐标系窗口。
按下F4键,或者单击菜单【View】→【Coordinate Window】后,打开坐标系窗口。
当鼠标在图形区移动时,在坐标窗口中显示了当前鼠标所在位置的坐标值。
(3)创建机械臂关节1(连杆)。
单击连杆按钮,将其的长、宽、深选项,设置为300mm、40mm、10mm,如图2.1所示。
在图形区单击鼠标左键,然后将连杆拖至水平位置时,再单击鼠标左键。
图2.1创建连杆图2.2创建孔
(4)在连杆的右端打孔。
在几何建模工具栏单击打孔按钮,将半径Radius设置为10mm,深度设置为10mm,如图2.2所示。
然后在图形区模型附近单击鼠标左键,在与XY平面垂直的表面上单击鼠标左键。
然后修改孔的位置,【HOLE_1】→【Modify】,在弹出的对话框中,将Center的坐标值设置成(300,0.0,5.0)(5)创建关节2。
用(3)的方法在关节1右端孔中心处创建关节2,如图2.3所示。
然后再将关节2向内侧平移10mm。
图2.3机械臂模型
(6)添加约束。
在关节1的左端与大地之间添加转动副,在关节1与关节2结合处添加转动副。
单击工具栏中的旋转副按钮,并将创建旋转副的选项设置为2Bod-1Loc和Normal Grid,然后在图形区单击关节1和大地,之后需要选择一个作用点,将鼠标移动到关节1的Marker1处出现center信息时,按下鼠标左键后就可以创建旋转副,旋转副的轴垂直于工作栅格。
然后用同样的方法创建关节1与关节2之间的旋转副,如图2.4所示。
图2.4创建旋转副
(7)添加驱动。
在运动副1(Joint1)和运动副2(Joint2)上分别添加旋转驱动。
单击主工具栏的旋转驱动按钮,然后在选择上面创建的旋转副1,然后在图形区单击鼠标右键,在快捷菜单中中选择Modify,在编辑对话框中将驱动函数设置为30d*sin(time),如图2.5所示。
用同样的方法在旋转副2上创建旋转驱动,并将驱动函数设置为20d*time*(-1)。
图2.5旋转驱动
(8)运行仿真计算。
单击主工具栏的仿真计算按钮,将仿真类型设置为Kinematic,仿真时间End Time设置为20,仿真步数Steps设置为500,然后单击运行按钮进行仿真计算。
(9)绘制运动轨迹。
单击菜单【Review】→【Create Trace Spline】,然后选择关节2右端点Marker4,再选择关节1与大地的铰接点,鼠标移动到Joint1处,单击鼠标
右键,在弹出对话框中选择ground,单击OK创建运动轨迹,如图2.6所示。
图2.6机器人末端运动轨迹
(10)结果后处理。
按下键盘上的F8键,界面将从View模块直接进入到PostProcess模块,后处理模块界面如图2.7所示。
图2.7后处理模块界面
(11)后处理模块界面
在后处理模块,通过菜单【View】→【Load Animation】可以载入动画。
在仿真动画中可以播放两种动画,一种是在时间域内进行的运动学和动力学仿真计算动画;另一种是在频率域内的,播放通过现行化或者在震动模块中的计算模型的振型动画。
单击播放按钮后开始播放动画,如果在播放同时按下记录按钮,在播放动画的同时也将动画保存到动画文件中,动画文件位于ADAMS的工作目录下。
在后处理模块中,通过菜单【View】→【Load Plot】,通过选择相应的选项,绘制出相应的结果曲线。
如果2.8、2.9、2.10所示,分别绘制出机械臂末端点的位移曲线、速度曲线和加速度曲线。
图2.8机器人末端位移曲线
图2.9机器人末端速度曲线
图2.10 机器人末端加速度曲线
三、串联机器人的动力学分析
(1)创建机械臂模型。
按照二中(1)~(6)步创建同样的机械臂,并添加运动副约束。
(2)添加驱动。
与运动分析不同,动力学分析添加的驱动为单分量力矩。
单击工具栏上的单分量力矩选项,将选项设置为Space Fixed、Normal to Grid和Constant,然后勾选Torque项并输入3800,然后在图形区单击关节1,再在
其上单击任何一点。
用同样的方法添加关节2的驱动,并将其值设置为-120。
图3.1添加驱动——单分量力矩
(3)运动学计算仿真。
单击菜单【Simulate】→【Iteractive Controls】,打开交互式仿真控制对话框,在对话框中将仿真时间End Time设置为2,仿真步数Steps设置为500,仿真类型Type设置为Dynamic,单击仿真计算按钮,观看仿真动画,模型将在重力和驱动力矩作用下运动。
(4)绘制运动轨迹。
单击菜单【Review】→【Create Trace Spline】,然后选择关节2右端点Marker4,再选择关节1与大地的铰接点,鼠标移动到Joint1处,单击鼠标右键,在弹出对话框中选择ground,单击OK创建运动轨迹,如图3.2所示。
图3.2 机器人末端运动轨迹
(5)结果后处理。
在后处理模块,通过菜单【View】→【Load Animation】可以载入动画。
单击播放按钮后开始播放动画,在播放同时按下记录按钮,将动画保存到动画文件中。
在后处理模块中,通过菜单【View】→【Load Plot】,通过选择相应的选项,绘制出相应的结果曲线。
如果3.3、3.4、3.5所示,分别绘制出机械臂末端点的位移曲线、速度曲线和加速度曲线。
图3.3机器人末端位移曲线
图3.4 机器人末端速度曲线
.
.. 图3.5机器人末端加速度曲线
四、小结及心得
运用ADAMS通过以上过程对两自由度串联机器人进行了仿真分析,得出相应的位移、速度、加速度曲线以及工作端的运动轨迹,得出了构件的运动的规律,同时也可以较准确掌握机器人工作端的位移、速度、加速度等动力学参数。
这对于对机构进行结构优化提供了一定依据。
通过用ADAMS软件对连杆机器人进行以上的简单模拟,我对机械系统动力学仿真软件有了初步的认识和一定的了解,为以后进一步学习这些软件打下了基础。