基于STM32的多自由度机械臂设计
- 格式:pdf
- 大小:817.77 KB
- 文档页数:1

机器人测控技术大作业课程设计课程设计名称:基于STM32的机械臂运动控制分析设计专业班级:自动1302学生姓名:张鹏涛学号:指导教师:曹毅课程设计时间:2016-4-28~2016-5-16指导教师意见:成绩:签名:年月日目录摘要 (II)第一章运动模型建立................................................................................................ I II1.1引言 ............................................................................................................... I II1.2机器人运动学模型的建立 ............................................................................. I II (IV)第二章机械臂控制系统的总体方案设计 (V)2.1机械臂的机械结构设计 (V)V错误!未定义书签。
2.2机械臂关节控制的总体方案 (VI)2.2.1机械臂控制器类型的确定 (VI)2.2.2机械臂控制系统结构 (VII)2.2.3关节控制系统的控制策略 (VII)第三章机械臂控制系统硬件设计 (VII)3.1机械臂控制系统概述 (VII)3.2微处理器选型 .............................................................................................. V III3.3主控制模块设计 .......................................................................................... V III错误!未定义书签。

机器人测控技术大作业课程设计课程设计名称:基于STM32的机械臂运动控制分析设计专业班级:自动1302学生姓名:张鹏涛学号:201323020219指导教师:曹毅课程设计时间:2016-4-28~2016-5-16目录摘要 (V)第一章运动模型建立...................................................................................... V I1.1引言 ................................................................................................ V I1.2机器人运动学模型的建立.................................................................. V I1.2.1运动学正解 (VIII)第二章机械臂控制系统的总体方案设计 (X)2.1机械臂的机械结构设计 (X)2.1.1臂部结构设计原则 (X)2.1.2机械臂自由度的确定 (XI)2.2机械臂关节控制的总体方案 (XI)2.2.1机械臂控制器类型的确定 (XI)2.2.2机械臂控制系统结构 (XII)2.2.3关节控制系统的控制策略 (XIII)第三章机械臂控制系统硬件设计 (XIII)3.1机械臂控制系统概述 (XIII)3.2微处理器选型 (XIV)3.3主控制模块设计 (XV)3.3.1电源电路 (XV)3.3.2复位电路 (XVI)3.3.3时钟电路 (XVI)3.3.4 JTAG调试电路.................................................................. X VII3.4驱动模块设计................................................................................. X VII3.5电源模块设计.................................................................................. X IX 第四章机械臂控制系统软件设计................................................................... X X4.1初始化模块设计............................................................................... X X4.1.1系统时钟控制....................................................................... X X4.1.2 SysTick定时器 (XXII)4.1.3 TIM定时器 (XXIII)4.1.4通用输入输出接口GPIO (XXIV)4.1.5超声波传感器模块 (XXV)总结 (XXVI)参考文献 (XXVII)附录A ......................................................................................................... X XIX 附录B . (XXX)设计要求:设计一个两连杆机械臂,具体参数自行设计,建立其运动学模型,然后在此基础上完成该机械臂两点间的路径规划,并给出仿真结果。

基于stm32的四自由度机械臂搬运项目实训基于STM32的四自由度机械臂搬运项目实训随着工业自动化的快速发展,机械臂在生产领域的应用越来越广泛。
而基于STM32的四自由度机械臂搬运项目实训,给了我们一个机会去深入了解机械臂的工作原理及其在生产中的应用。
首先,了解机械臂的构成。
四自由度机械臂由底座、肩部、肘部和手部组成,在一个三维空间内完成物体的抓取、搬运与放置等任务。
通过使用STM32单片机作为控制器,可以实现对机械臂的运动和位置控制。
在实训过程中,我们需要首先编写STM32的程序代码,实现与机械臂的通讯和控制。
通过串口通讯,我们可以将PC端的指令发送给机械臂,控制其运动。
同时,机械臂也会将当前的位置和传感器数据通过串口返回给PC端,以实时监测机械臂的状态。
接下来,进行机械臂的硬件搭建。
我们需要将各部分组件如舵机、传感器等连接到STM32开发板上,并根据机械臂的结构进行正确的布线和接线。
通过正确连接和配置,我们可以实现对机械臂各个关节的控制和监测。
在程序和硬件准备完成后,我们就可以开始实际操作机械臂了。
首先,我们需要对机械臂进行校准,确保各个关节的初始位置准确。
然后,通过PC端发送指令,让机械臂完成特定的动作,比如抓取一个物体并将其移动至预定位置。
通过对机械臂的运动轨迹和动作的控制,我们可以实现准确、快速地完成各种搬运任务。
在实训过程中,我们需要不断调试和优化机械臂的运动控制算法,以提高机械臂的精度和稳定性。
同时,我们也需要学习如何通过编程对机械臂进行路径规划,并实现与其他设备的联动控制。
通过这个实训项目,我们可以全面了解机械臂的工作原理和应用场景,培养对工业自动化技术的实际操作能力和创新能力。
同时,也可以认识到机械臂在生产领域带来的巨大潜力与价值,为未来的职业发展打下坚实的基础。
总的来说,基于STM32的四自由度机械臂搬运项目实训是一项极富挑战和指导意义的实践任务。
通过实际操作和深入学习,我们可以全面了解机械臂的工作原理、控制方法和应用场景,培养相关技能并为未来的职业发展打下坚实基础。
单片机控制三自由度圆柱坐标机械手设计一、引言随着科学技术的不断发展,机械手在工业生产、科研等领域扮演着越来越重要的角色。
机械手的设计是其中的关键环节之一,而单片机是机械手控制的核心部分之一、本文将介绍一种基于单片机控制的三自由度圆柱坐标机械手的设计。
二、机械手的结构设计该机械手的结构主要由三个旋转关节组成,分别对应三个自由度。
每个旋转关节由步进电机驱动,通过直线传动装置实现转动,并带有相应的位置反馈传感器。
三、单片机的选取单片机是机械手控制的核心部分,控制机械手的动作和位置。
单片机的选择需要考虑其计算性能、接口资源等方面的要求。
本设计选择了STM32系列的单片机,具有大容量的存储器和强大的计算能力,同时提供多种通信接口和模拟/数字接口,满足了机械手控制的需求。
四、电路设计电路设计包括电源电路、电机驱动电路和控制电路三个模块。
电源电路为电机驱动和单片机提供稳定的电源。
电机驱动电路采用步进电机驱动芯片,通过信号电平控制电机的转动。
控制电路主要由单片机和传感器组成,负责接收传感器的反馈信号,并控制电机的转动。
五、软件设计在单片机软件设计方面,本设计采用C语言进行编程。
通过编写相应的程序,实现机械手的运动控制,包括正向运动、逆向运动和位置控制等功能。
同时,还可以为机械手增加一些智能化的功能,如碰撞检测、路径规划等。
六、实验与结果将设计好的电路板焊接好后,进行实验测试。
通过对机械手的不同输入信号进行测试,观察机械手的运动情况,并对其进行调试。
最终,可以实现通过单片机控制的三自由度圆柱坐标机械手的正常运行。
七、总结本文设计了一种基于单片机控制的三自由度圆柱坐标机械手。
通过对机械手的结构和电路进行设计,选取合适的单片机和编写相应的控制程序,实现了机械手的运动控制。
该设计具有较高的可靠性和灵活性,可以广泛应用于工业生产和科研等领域。
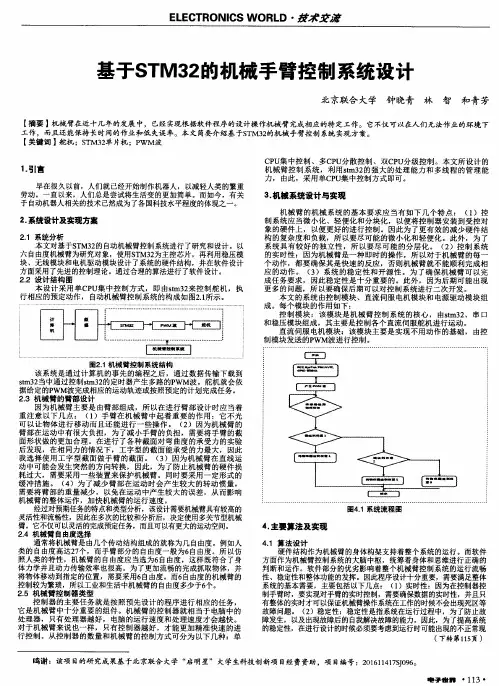
Science and Technology &Innovation ┃科技与创新·27·2017年第10期文章编号:2095-6835(2017)10-0027-02基于STM32的协作机器人机械臂控制系统设计李以聪,戴福全,肖明伟,陈剑枰,陈志伟,吴国安(福建工程学院,福建福州350100)摘要:目前,针对协作机器人的柔顺控制、零力控制问题,提出了一种基于以ST 公司的STM32为微控制器的协作机器人机械臂控制系统。
该系统采用数字PID 闭环算法改善机械臂的柔顺运动,增强其稳定、可靠性能,并加上力矩传感器或电流检测电路感知外界的力矩变换情况,补偿机械臂的自重,实现零力控制,为机器人的快速示教奠定基础。
实验结果表明,将STM32系列微控制器作为主控制器具有可行性,可以应用于协作机器人的机械臂控制系统中,且具有广阔的应用前景,并最终将其运用于实际工业生产加工中。
关键词:机械臂;协作机器人;PID ;STM32中图分类号:TP242文献标识码:ADOI :10.15913/ki.kjycx.2017.10.027一直以来,控制器都是机器人控制系统的核心,但是,国外相关产业公司对我国实行严厉的保密措施。
随着微处理器行业的快速发展,市面上陆续出现了高性能、高性价比的32位微处理器,它们的性能能够满足机械臂对控制器的运算需求。
针对目前协作机器人控制系统资源匮乏,价格昂贵且工作不稳定等问题,提出了一种改进设计,以满足中小企业对机械臂的控制需求。
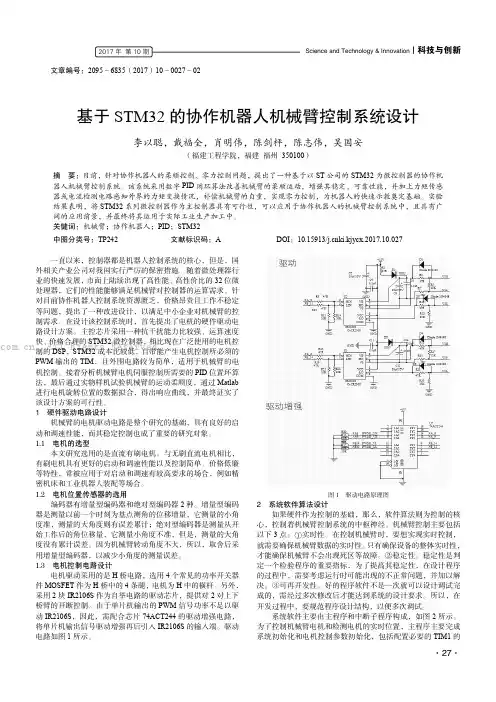
在设计该控制系统时,首先提出了电机的硬件驱动电路设计方案。
主控芯片采用一种抗干扰能力比较强、运算速度快、价格合理的STM32微控制器,相比现在广泛使用的电机控制的DSP ,STM32成本比较低,自带能产生电机控制所必须的PWM 输出的TIM ,且外围电路较为简单,适用于机械臂的电机控制。
接着分析机械臂电机伺服控制所需要的PID 位置环算法,最后通过实物样机试验机械臂的运动柔顺度,通过Matlab 进行电机旋转位置的数据拟合,得出响应曲线,并最终证实了该设计方案的可行性。
基于STM32双臂魔方机器人的设计双臂魔方机器人是一种用来解魔方的机器人,它基于STM32芯片进行设计和控制。
下面将详细介绍该机器人的设计过程。
首先,双臂魔方机器人的主要硬件部分包括两个机械臂、魔方识别模块、机械臂控制模块和电源模块。
机械臂由电机、舵机和传感器组成,用于实现抓取魔方和旋转魔方的动作。
魔方识别模块使用摄像头和图像处理算法来识别魔方的状态和颜色。
机械臂控制模块通过STM32芯片来控制机械臂的运动,包括抓取、旋转和放置魔方。
电源模块为机器人提供电能供应。
在软件方面,首先需要进行图像处理和识别算法的编写。
使用OpenCV库可以对魔方的图像进行处理,提取各个小块的颜色信息。
然后,使用颜色信息来识别魔方的状态,并生成解决魔方的步骤。
在生成解决步骤后,可以将步骤转化为机械臂的指令,以便机械臂完成相应的动作。
通过STM32芯片和相关编程,可以实现机械臂的控制。
另外,为了方便操作和控制双臂魔方机器人,可以设计一个人机交互界面。
该界面可以通过显示屏和按钮进行控制操作,显示魔方状态和解决步骤。
界面也可以与机械臂控制模块通过串口通信来实现命令的传输和控制。
在进行实际设计和制作时,需要注意以下几点。
首先,机械臂的设计需要考虑力学性能和稳定性,以确保机械臂能够准确地抓取和旋转魔方。
其次,魔方识别模块需要进行图像处理算法和颜色信息的提取,以保证识别的准确性。
另外,机械臂控制模块和STM32芯片的编程也需要进行充分测试和验证,确保机械臂能够按照生成的解决步骤来完成动作。
总之,双臂魔方机器人的设计基于STM32芯片,通过图像处理和识别算法来实现魔方的识别和解决。
机械臂通过STM32芯片进行控制,实现抓取和旋转魔方的动作。
此外,设计还包括一个人机交互界面,便于操作和控制机器人。
在实际设计和制作过程中,需要注意硬件和软件的相互配合,以确保机器人的稳定性和可靠性。
井冈山大学学报(自然科学版) 73 文章编号:1674-8085(2019)01-0073-05基于STM32的机械臂运动控制系统设计研究*刘磊1,余汾芬2(1. 安庆职业技术学院,安徽,安庆246003;2.安庆医药高等专科学校,安徽,安庆246052)摘要:为了提高机械臂运动的准确性以及提高机械臂的控制效率,运用STM32处理器设计了一种机械臂运动控制系统。
采用STM32作为主控系统的核心,通过角度位移传感器构成机械臂的感知模块,利用舵机驱动电路构成机械臂的运动模块,从而形成机械臂运动控制系统的硬件单元。
以模糊PID控制理论为软件核心,对机械臂运动过程中的轨迹偏差进行计算,形成控制量。
主控器STM32将根据控制量对机械臂的运动模块发出调控信号,使得机械臂能够快速回归预定的运动轨迹。
实验结果表明,本文所设计的机械臂运动控制系统,能够快速、准确地对机械臂的运动状态进行控制,提高机械臂运动的准确性。
关键词:机械臂;运动控制;STM32;角度位移传感器;模糊PID控制理论;运动轨迹中图分类号:TP391 文献标识码:A DOI:10.3969/j.issn.1674-8085.2019.01.015 RESEARCH ON THE DESIGN OF MANIPULATOR MOTION CONTROLSYSTEM BASED ON STM32*LIU Lei1,YU Fen-fen2(1. Anqing V ocational & Technical College, Anqing, Anhui 246003, China; 2. Anqing Medical College, Anqing, Anhui 246052, China)Abstract:To improve the accuracy of the manipulator motion and the control efficiency of the manipulator, a manipulator motion control system is designed by using STM32 processor.STM32 is used as the core of the main control system. The perception module of the manipulator is composed of angular displacement sensor, and the motion module of the manipulator is composed of the steering motor driving circuit. They form the hardware unit of the manipulator motion control system.Taking the theory of fuzzy PID control as the software core, the trajectory deviation of the manipulator is calculated to form the control quantity.The main controller STM32 will send the control signal to the motion module of the manipulator according to the control quantity, so that the manipulator can quickly return to the predetermined trajectory.The experimental results show that the motion control system of the manipulator designed in this paper can quickly and accurately control the motion state of the manipulator, which can improve the accuracy of the motion of the manipulator.Key words:manipulator; motion control; stm32; displacement sensor; fuzzy pid control theory; motion trajector0 引言机械臂是一种模拟人体手臂的机器[1]。
2017年第7期时代农机TIMES AGRICULTURAL MACHINERY第44卷第7期Vol.44No.72017年7月Jul.2017作者简介:孟建平(1981-),男,内蒙古人,大学本科,讲师,主要研究方向:控制理论与控制工程。
基于STM32的多自由度机械臂设计研究孟建平(内蒙古机电职业技术学院电气工程系,内蒙古呼和浩特010070)摘要:文章阐述了机械臂的组成及原理,对驱动模块、陀螺仪、控制模块、执行模块的控制进行分析,并探讨了基于STM32的多自由度机械臂设计,以期为我国的机械臂设计提供借鉴。
关键词:STM32单片机;多自由度;机械臂随着机械技术的迅猛发展,机械臂的设计研究日益发达,机械臂在生产实践中发挥着日益重要的作用。
我国的机械臂设计研究起步较晚,缺乏良好的精度控制和机械性能。
因此,我国加强对仿人型机械臂及其控制系统的研究,对于我国机械领域的发展具有至关重要的深远意义。
1机械臂的组成及原理(1)驱动模块的精确控制。
机械臂的控制信号,经由机械臂接收机的通道,实现对机械臂信号调制芯片的进入,并完成对直流偏置电压的有效获取。
机械臂驱动模块内部存在着基准电路,能实现对基准信号的产生。
产生的基准信号的宽度是1.5ms,基准信号周期为20ms。
通过比较电位器与直流偏置电压二者的电压差,实现对电压差输出的有效获取。
当电机保持一定的转速时,电位器在级联减速齿轮的带动下,实现旋转。
电压差为0时,电机的转动停止。
通常需要利用时基脉冲,实现对机械臂舵机的有效控制。
时基脉冲以20ms 为宜。
该时基脉冲的高电平部分,通常是0.5~2.5ms 之间的角度控制脉冲部分,其总间隔是2ms。
(2)陀螺仪的控制。
陀螺仪的原理如下:当不存在外力对旋转物体的影响时,其旋转轴所指方向不变。
根据该原理能制造出实现方向保持的陀螺仪。
对于陀螺仪的工作,需要施加一个作用力,确保陀螺仪的快速旋转,通常能达到每分钟实现几十万转,且能实现较长的工作时间。
沐 勺,密衣厚机器人测控技术大作业课程设计课程设计名称:基于STM32的机械臂运动控制分析设计课程设计时间:2016-4-28 〜2016-5-16目录摘要 (IV)专业班级: 学生姓名: 学 号: 指导教师:自动1302 张鹏涛 201323020219曹毅第一章运动模型建立 (V)1.1 引言 (V)1.2 机器人运动学模型的建立 (V)1.2.1 运动学正解 (VII)第二章机械臂控制系统的总体方案设计 (VIII)2.1 机械臂的机械结构设计 (VIII)2.1.1 臂部结构设计原则 (VIII)2.1.2 机械臂自由度的确定 (IX)2.2 机械臂关节控制的总体方案 (X)2.2.1 机械臂控制器类型的确定 (X)2.2.2 机械臂控制系统结构 (XI)2.2.3 关节控制系统的控制策略 (XI)第三章机械臂控制系统硬件设计 (XII)3.1 机械臂控制系统概述 (XII)3.2 微处理器选型 (XIII)3.3 主控制模块设计 (XIII)3.3.1 电源电路 (XIV)3.3.2 复位电路 (XIV)3.3.3 时钟电路 (XIV)3.3.4 JTAG 调试电路 (XV)3.4 驱动模块设计 (XV)3.5 电源模块设计 (XVII)第四章机械臂控制系统软件设计 (XVIII)4.1 初始化模块设计 (XVIII)4.1.1 系统时钟控制 (XVIII)4.1.2 SysTick 定时器 (XX)4.1.3 TIM 定时器 (XXI)4.1.4 通用输入输出接口GPIO (XXII)4.1.5 超声波传感器模块 (XXII)总结 (XXIV)参考文献 (XXV)附录A (XXVI)附录B (XXVII)设计要求:设计一个两连杆机械臂,具体参数自行设计,建立其运动学模型,然后在此基础上完成该机械臂两点间的路径规划,并给出仿真结果。
设计完成上述目标的控制系统,控制器可以自行选择(单片机,ARM ,DSP,PLC 等),其他硬件部分根据系统所需要完成的功能自行选择,基本要求要体现系统的输入,输出信号和人机交互界面,画出整个系统的硬件结构(电路模块,驱动模块,控制模块等)和软件部分。
stm32机械臂4自由度程序代码概述在现代工业生产中,机械臂被广泛应用于各种自动化任务中,它能够完成人们难以完成的高精度、高速度的工作。
而stm32是一款性能强大的微控制器,具有广泛的应用领域。
本文将介绍如何使用stm32编写一个具有4自由度的机械臂程序代码。
硬件搭建在开始编写程序代码之前,我们首先需要搭建硬件平台。
以下是搭建4自由度机械臂所需的硬件组件:1.stm32开发板:我们选择一款合适的stm32开发板作为主控制器;2.步进电机:我们选择4个步进电机作为机械臂的关节驱动器;3.驱动模块:我们需要使用4个步进电机驱动模块来控制步进电机;4.电源:我们需要为stm32开发板和驱动模块提供稳定的电源;5.连接线:我们需要使用合适的连接线将硬件组件连接起来。
完成硬件搭建后,我们可以开始编写程序代码。
程序框架下面是一个简单的程序框架,用于控制4自由度机械臂的运动:#include <stm32f4xx.h>// 定义步进电机引脚#define MOTOR1_PIN1 GPIO_Pin_0#define MOTOR1_PIN2 GPIO_Pin_1#define MOTOR2_PIN1 GPIO_Pin_2#define MOTOR2_PIN2 GPIO_Pin_3#define MOTOR3_PIN1 GPIO_Pin_4#define MOTOR3_PIN2 GPIO_Pin_5#define MOTOR4_PIN1 GPIO_Pin_6#define MOTOR4_PIN2 GPIO_Pin_7// 定义步进电机驱动函数void motor1_forward(void);void motor2_forward(void); void motor2_backward(void); void motor3_forward(void); void motor3_backward(void); void motor4_forward(void); void motor4_backward(void);int main(void){// 初始化stm32开发板// 初始化步进电机引脚while (1){// 控制机械臂的运动 }}void motor1_forward(void) {// 控制步进电机1正转}void motor1_backward(void) {// 控制步进电机1反转}void motor2_forward(void) {// 控制步进电机2正转}void motor2_backward(void) {// 控制步进电机2反转}void motor3_forward(void) {// 控制步进电机3正转}{// 控制步进电机3反转}void motor4_forward(void){// 控制步进电机4正转}void motor4_backward(void){// 控制步进电机4反转}程序详解初始化stm32开发板在程序的main函数中,我们需要初始化stm32开发板。
基于STM32的六自由度机器手臂的研究
郑瑶;方思棋
【期刊名称】《电子制作》
【年(卷),期】2024(32)10
【摘要】本文介绍了一款适配于快递中转站的六自由度机器手臂系统,系统通过操纵PS2手柄控制机器手臂的底盘、腹部、胸部、颈部、合金爪子一共六个舵机,实现舵机六个自由度的旋转以及合金爪子开合程度的控制,该机器手臂可对质量小于800g、距离小于400cm的物体进行抓取和投放。
经过多次实验验证,该控制系统可以自动、快速分拣物体,从而提高快递包裹的分拣效率和正确率。
【总页数】4页(P42-45)
【作者】郑瑶;方思棋
【作者单位】梧州学院电子与信息工程学院
【正文语种】中文
【中图分类】TP2
【相关文献】
1.六自由度辅助型康复机器人手臂的研究与设计
2.基于机器视觉的六自由度机器人自动示教系统研究
3.六自由度手臂机器人的捡拾动作研究
4.基于AVR平台的六自由度仿人机械手臂控制算法研究
5.六自由度手臂机器人的检拾动作研究
因版权原因,仅展示原文概要,查看原文内容请购买。
基于STM32的六自由度机械臂系统设计包黎明,任林昌*,李光宇,马 易,王继涛,景红燕(武威职业学院,甘肃 武威 733000)摘 要:随着智能化的发展,人工智能在计算机领域内的应用越来越广,并在机器人、控制系统、仿真系统等方面得到应用。
智能机器人的出现可以代替人从事各种生产作业,将更加广泛地代替人从事各种生产作业,使人类从繁重的、重复单调的、有害健康以及和危险的生产作业中解放出来。
因此本文对STM32的六自由度机械臂系统设计进行分析,使机械臂的研究对机器人和人工智能方面具有一定的应用价值。
关键词:六自由度;机械臂;智能机器人中图分类号:TP241 文献标识码:A 文章编号:1002-5065(2019)21-0266-2Design of 6-DOF manipulator system based on stm32BAO Li-ming, REN Lin-chang*, LI Guang-yu, MA Yi, WANG Ji-tao, JING Hong-yan(Wuwei Vocational College, Wuwei 733000,China)Abstract: With the development of intelligence, artificial intelligence is more and more widely used in the field of computer, and it is applied in robot, control system, simulation system and so on. The emergence of intelligent robots can replace people to engage in all kinds of production operations, and will more widely replace people to engage in all kinds of production operations, so that human beings can be liberated from heavy, repetitive monotonous, harmful to health and dangerous production operations. Therefore, this paper analyzes the design of six degree of freedom manipulator system of STM32, which makes the research of manipulator have certain application value in robot and artificial intelligence.Keywords: six degrees of freedom; mechanical arm; intelligent robot目前,机器人的主要工作是通过机械臂的运动来实现的,因此对机械臂运动的轨迹规划是实现其运动控制和动力学分析的必要过程,且机器人机械臂的运动规划是一种可靠的提高机器人运动轨迹精度和稳定性[1]。