基于GPS定位技术的车辆运行姿态检测
- 格式:pdf
- 大小:342.58 KB
- 文档页数:5

tbox检测汽车异动的原理全文共四篇示例,供读者参考第一篇示例:T-Box是一种集成了GPS定位、通信、智能分析等功能的车载设备,主要用于监控汽车的行驶状态和提供车辆安全保障。
T-Box可以通过检测汽车的姿态和运动状态,识别并预譳可能发生的异常情况,及时向车主或相关部门发出警报,防止事故的发生。
T-Box检测汽车异动的原理主要包括以下几个方面:1. GPS定位技术:T-Box内置了GPS模块,可以实时获取车辆的位置信息。
当车辆发生异动时,T-Box可以通过GPS定位技术迅速定位车辆的位置,为后续处理提供必要的依据。
2. 加速度传感器:T-Box内置了加速度传感器,可以检测车辆的加速度、减速度和转弯半径等运动参数。
当车辆发生急加速、急减速或急转弯等异常情况时,T-Box可以通过加速度传感器及时发现并报警。
3. 车速检测:T-Box可以监测车辆的实时车速,并与道路限速比较,当车辆超速行驶时,T-Box可以发出相应的警报,提醒驾驶员减速。
T-Box还可以记录超速驾驶的行为,为后续处理提供证据。
4. 距离测量:T-Box可以通过GPS定位技术测量车辆之间的相对距离,判断车辆的安全距离是否合理。
当车辆之间距离过近时,T-Box 可以提醒驾驶员注意保持安全距离,避免碰撞事故的发生。
第二篇示例:T-BOX是一种通过连接车载诊断接口和智能手机进行通信的设备,它可以实现对车辆的实时监测和远程控制。
在汽车领域,T-BOX的应用已经越来越广泛,其中一项重要功能就是检测汽车的异动情况。
那么,T-BOX是如何监测汽车异动的呢?下面我们一起来了解一下T-BOX检测汽车异动的原理。
T-BOX通过连接车载诊断接口和智能手机,可以实时获取车辆的信息,包括车速、加速度、转向角度等。
通过这些数据,T-BOX可以对汽车进行实时监测,当汽车出现异动情况时,T-BOX可以迅速发现并做出预警。
T-BOX内置了各种传感器,比如加速度传感器、陀螺仪传感器等,这些传感器可以实时监测汽车的运动状态。

基于GPS的车辆定位系统设计与实现GPS(全球定位系统)是一种利用卫星信号进行定位的技术,近年来在车辆定位领域得到了广泛应用。
本文将探讨基于GPS的车辆定位系统的设计与实现。
1. 引言车辆定位系统可以对车辆的位置和行驶状态进行实时监测和记录,对于车队管理、反恐防控、物流配送等领域具有重要意义。
而基于GPS的车辆定位系统则可以充分利用卫星信号实现高精度定位。
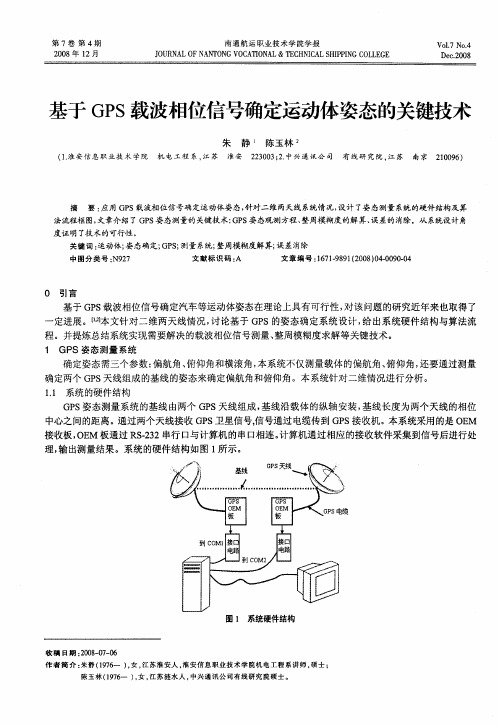
2. 系统设计(1)硬件设计基于GPS的车辆定位系统的硬件设计主要包括GPS接收器、GSM模块和中央处理器。
GPS接收器用于接收卫星信号并对车辆位置进行定位,GSM模块用于实时传输车辆位置信息,中央处理器则负责对接收到的数据进行处理和存储。
(2)软件设计车辆定位系统的软件设计主要包括位置计算算法、通信协议和用户界面设计。
位置计算算法可以利用接收到的卫星信号计算车辆的经纬度坐标,并根据时间和速度信息进行位置预测。
通信协议则用于将位置信息传输给监控中心或用户手机。
用户界面设计则需简洁明了,方便用户查看车辆位置和相关信息。
3. 系统实现(1)硬件实现车辆定位系统的硬件实现需要选购适合的GPS接收器、GSM模块和中央处理器,并进行相应的连线和调试。
GPS接收器应安装在车辆天线上,以便接收到卫星信号;GSM模块则需要与通信基站连接,以便传输位置信息。
(2)软件实现车辆定位系统的软件实现首先需要编写位置计算算法,确定如何根据接收到的卫星信号计算车辆位置。
其次,需要设计通信协议,使得位置信息可以通过GSM 模块传输给监控中心或用户手机。
最后,需要设计用户界面,使得用户可以方便地查看车辆位置和其他相关信息。
4. 系统优化为提高车辆定位系统的准确性和稳定性,可以进行一系列优化措施。
首先,可以增加卫星信号接收器的数量,以提高信号的强度和稳定性。
其次,可以引入差分GPS技术,减小定位误差。
此外,还可以对算法进行优化,提高位置计算的准确性。
5. 应用前景基于GPS的车辆定位系统在车队管理、反恐防控、物流配送等领域具有广阔的应用前景。

使用GPS定位技术进行车辆轨迹测量与分析随着现代科技的快速发展,GPS(全球定位系统)定位技术已经在各个领域得到广泛应用。
其中,车辆轨迹测量与分析是GPS定位技术的一个重要应用方向。
通过获取车辆的位置信息及相关数据,可以进行交通管理、路径规划、运输物流等方面的分析,为城市的交通运输系统提供有力支撑。
GPS技术可以通过卫星信号对车辆进行定位,准确度高,并能够提供车辆的实时位置和移动轨迹。
它利用即时的重要性原则,将车辆的位置信息转化为坐标数据,通过计算这些坐标点之间的距离和方向,进而得出车辆的轨迹。
不仅如此,GPS还能够获取到车辆的速度、方向等数据,有助于进一步分析车辆的行驶状况和路线选择。
在城市交通管理方面,利用GPS技术进行车辆轨迹测量与分析能够有效地改善交通拥堵、提高路网效率。
通过对大规模车辆轨迹数据的分析,可以了解拥堵点、瓶颈路段等交通状况,进而优化信号灯控制、调整道路设计和规划,提升整个城市的交通运输水平。
同时,可以根据车辆轨迹数据对城市内的停车管理进行优化,制定合理的停车政策,提供更多的停车位,减少停车难题。
此外,在路径规划方面,使用GPS技术测量车辆轨迹可以为驾驶员提供实时的路线导航和交通状况信息。
通过分析车辆的轨迹数据,可以根据道路拥堵情况和车辆行驶速度,进行智能路径规划,选择最优的行驶路线,减少行车时间和交通堵塞。
同时,还可以根据车辆轨迹数据进行交通事故的预测和预防工作,提前发现危险路段和高风险区域,减少交通事故发生的可能性。
运输物流领域也可以受益于使用GPS技术进行车辆轨迹测量与分析。
通过对车辆的位置和行驶轨迹进行实时监测,货物的运输过程可以得到全程监控,确保货物的安全和准时交付。
同时,基于车辆轨迹数据的分析,还可以对物流运输过程进行优化,提高运输效率和减少物流成本。
例如,可以确定最佳的配送路线,减少货车的行驶里程,提高货物的运输效率。
在使用GPS技术进行车辆轨迹测量与分析时,也需要考虑数据隐私和信息安全问题。

基于GPS技术的车辆行驶轨迹模拟与分析随着科技的不断发展,GPS技术也在越来越多的领域得到了广泛应用。
其中,基于GPS技术的车辆行驶轨迹模拟与分析是其中一个应用领域。
一、GPS技术简介GPS技术(Global Positioning System,即全球定位系统)是由美国推出并管理的一项卫星导航系统,其作用是为全地球的定位、导航、授时提供免费、开放、连续的全天候服务。
目前,GPS技术已经成为了公共交通、航空航天、国防等领域的重要工具。
二、车辆行驶轨迹模拟车辆行驶轨迹模拟是依据车辆运行的特性,通过计算机模拟车辆运行所产生的路线。
GPS技术可以提供车辆的当前位置和速度信息,因此,通过对GPS数据的捕获和存储,可以得到车辆的行驶轨迹。
同时,通过对所记录的GPS数据进行筛选、清洗、处理和分析,可以得出车辆的驾驶行为、驾驶轨迹以及路况。
三、车辆行驶轨迹分析车辆行驶轨迹的分析可以揭示车辆行驶过程中的路况以及驾驶员的行为习惯。
在实际应用中,车辆行驶轨迹分析的具体内容包括:1.车速分析:通过对车辆的GPS数据进行统计分析,可以得到车辆不同阶段的平均速度,以及车辆的最高和最低速度。
2.停车时长分析:通过判断车辆的GPS数据,可以确定车辆的停车时间,进而分析停车的位置、停车时长等信息。
3.驾驶行为分析:通过对车辆行驶轨迹的分析,可以得到驾驶员的驾驶习惯、路线选择以及行驶速度等细节信息。
4.路况分析:通过对车辆行驶轨迹的处理,可以得到不同路段的通行时间、车辆拥堵情况、交通事故等信息,为城市交通规划和交通治理提供有力的数据支持。
四、车辆行驶轨迹模拟与分析的应用车辆行驶轨迹模拟与分析的应用十分广泛,具体包括以下几个方面:1.智能交通管理:通过车辆行驶轨迹模拟与分析,可以实现智能交通管理,优化路网和交通流量,提高交通效率。
2.车队管理:通过对车辆行驶轨迹的分析,可以实现对车队运营的管理和监控,为车队的运营管理提供有力的数据支持。
车联网中车辆轨迹分析及驾驶行为识别随着技术的不断发展,车联网(Internet of Vehicles,IoV)已经成为人们日常生活中必不可少的一部分。
车联网通过将车辆、通信、传感器和互联网技术结合起来,实现了车辆之间的信息交流和智能化管理。
车辆轨迹分析和驾驶行为识别是车联网中的重要应用之一,本文将从车辆轨迹分析的概念、技术和实现方式以及驾驶行为识别的应用、优势和未来发展方向等方面展开探讨。
一、车辆轨迹分析车辆轨迹分析是指通过车辆移动轨迹数据的收集和分析,获取车辆运行状态、行驶规律和路况等信息。
车辆轨迹分析可以通过车载设备、GPS定位和车联网平台等方式进行信息采集和传输。
其技术核心是通过数据挖掘和机器学习等技术方法,对大量的车辆轨迹数据进行建模和分析,得到有用的信息和结论。
车辆轨迹分析的具体实现方式包括以下几个方面:1. GPS定位技术:GPS定位技术是车辆轨迹分析的基础。
它可以通过卫星信号对车辆的位置进行精确定位,进而实现轨迹数据的采集和传输。
2. 车载设备:车载设备可以通过与车辆电子控制系统的接口进行数据交互,获取车辆的运行状态和车速等信息,并将其传输到车联网平台。
3. 车联网平台:车联网平台是车辆轨迹分析的核心。
它可以通过互联网技术和分布式数据处理系统,对大量的车辆轨迹数据进行后台处理和分析,得到有用的信息和结论。
车辆轨迹分析的应用范围非常广泛。
它可以帮助交通管理部门、物流企业和智能交通系统等实现车辆运行监控、路况预测、货物追踪等应用。
二、驾驶行为识别驾驶行为识别是指通过分析车辆轨迹、加速度和姿态等数据,对驾驶员的行为进行识别和判断。
驾驶行为识别可以通过数据挖掘和机器学习等技术方法,对驾驶员的行为、习惯和心理进行分析和建模,从而得出预测结果和警示信息。
驾驶行为识别的具体应用包括以下几个方面:1. 驾驶员疲劳驾驶监测:驾驶员疲劳驾驶是造成交通事故的一个非常重要的因素。
通过对驾驶员的眼睛、脸部表情和车辆轨迹等数据进行分析,可以实现对驾驶员状态的实时监测和警示。
机载GPS动态定位定速与定姿理论研究及软件开发一、本文概述随着航空、航天、无人机和自动驾驶技术的飞速发展,机载GPS 动态定位定速与定姿技术已成为现代导航与定位领域的关键技术之一。
本文旨在深入探讨机载GPS动态定位定速与定姿的理论基础,分析其关键技术,并开发一套相应的软件系统。
本文首先对GPS技术及其在动态环境下的应用进行概述,明确研究背景和意义。
随后,本文将详细分析机载GPS动态定位定速与定姿的理论模型,包括信号传播模型、误差分析模型以及定位定速与定姿算法。
在此基础上,本文将探讨相关软件开发的技术路线,包括软件架构设计、功能模块划分以及关键算法的实现。
本文将通过实验验证所开发软件的有效性和准确性,并对未来研究方向进行展望。
本文的研究不仅有助于推动机载GPS动态定位定速与定姿技术的理论发展,而且对于实际应用具有重要的参考价值。
二、机载动态定位定速技术研究随着航空、航天技术的快速发展,对飞行器的动态定位、定速及定姿技术提出了更高的要求。
机载GPS系统作为飞行器导航与控制的核心部分,其精度和实时性直接影响到飞行器的安全性和任务执行效率。
研究机载GPS动态定位定速技术,对于提升飞行器导航性能、保障飞行安全具有重要意义。
机载动态定位定速技术基于全球定位系统(GPS)的原理,通过接收多个卫星信号,计算出飞行器的精确位置、速度和时间信息。
该技术涉及到卫星信号的捕获、跟踪、解调以及定位算法等多个环节。
动态定位技术主要解决飞行器在高速运动中的位置变化问题,而定速技术则关注飞行器的速度变化。
在机载环境下,GPS信号受到多路径效应、大气干扰、信号遮挡等多种因素的影响,导致定位定速精度下降。
为应对这些挑战,本研究提出了以下解决方案:(2)引入卡尔曼滤波算法,对GPS数据进行实时滤波与融合,提高定位定速的精度(3)研究自适应抗干扰技术,降低多路径效应和大气干扰对GPS 信号的影响。
基于上述理论研究,本研究开发了机载GPS动态定位定速软件。
基于GPS定位技术的车辆运行姿态检测
系统的研究与设计
二零一五年四月
摘要
实时地获得载体平台的姿态参数一直是测控领域一个很重要的研究方向,但是传统测控方法在处理速度和成本等方面存在诸多弊端。
随着GPS定位精度的日益提高,利用GPS进行平台测姿的技术应运而生了。
论文针对基于GPS的单基线二维姿态测量技术进行了深入的研究,为利用GPS进行平台姿态测量提供了理论基础和实践依据。
文章首先简要介绍了GPS系统的组成,GPS定位的基本原理,载波相位测量基本原理、GPS测量过程中的误差来源和相应的解决办法。
然后对GPS姿态测量原理进行了详细论述,介绍了姿态参数解算将会用到的坐标系统及其之间的转换关系,给出了GPS姿态测量的观测方程。
并对姿态测量中的关键问题——整周模糊度确定和周跳检测进行了论述。
在理论阐述的基础之上,文章提出了PC机(笔记本电脑)加PCI04工控机的主从设计模式的二维姿态测量系统设计方案。
该姿态测量系统的下位机由一个PCI04 q-控机、两个OEM4 GPS接收机和两个701单频天线组成,文章对GPS 接收机数据的格式和预处理进行了详细的阐述。
姿态测量系统的上、下位机软件
是用VB下开发的,文章给出了详细的软件设计思路和流程。
最后,通过实地测试来验证了论文所提出的姿态测量系统的性能。
在静态条件下,以专业的测向设备为基准设备进行对比测试,证明了所提出姿态测量系统
的正确性和可靠性,而且得到了令人满意的测量精度。
然后分别测试了基线长度
和卫星高度掩角对测量精度的影响。
动态测试表明姿态测量系统可以在动态条件
下稳定工作,但测量精度不是很理想。
文章还充分考虑了姿态测量系统的成本因
素,通过实验验证了整合低成本GPS接收机的姿态测量系统的测量精度和稳定性,实验结果表明该姿态测量系统在静态条件下可以解算出姿态参数,但在动态
条件下稳定性较差。
关键词:GPS,姿态测量,载波相位测量,整周模糊度,周跳检测
1 序论
1973年美国国防部组织陆海空三军,共同研究建立了新一代卫星导航系统——授时与测距导航系统/全球定位系统(NavigationSystem TimingandR.anging/GlobalPositioning Syst锄—-NAvSTAR/GPS),称之为GPS。
根据设计方案,该系统可以向配备有接收设备的用户提供精确、连续的三维位置和速度信息。
GPS最初设计时主要用于精密定位和授时,但在系统开发的早期阶段,大家就认识到了将其用于平台姿态测量的可能性,由于GPS硬件开始发展相对缓慢,而且价格昂贵,因此当时利用GPS进行姿态测量仅限于仿真研究。
随着GPS载波相位差分技术的快速发展,利用GPS技术来测量载体的姿态参数迅速成为GPS研究的又一热点。
1.1.课题的研究目的和意义
在中国这样一个地大物博、幅员辽阔的国家,铁路交通是最重要的交通工具,是国家运输体系的骨干,承担着远距离、大运量全天候的运输需求,具有受气候影响小、绿色环保、低排放的优势。
在过去二十多年里,政府对铁路实行优惠政策,为加快铁路发展创造了有利条件。
但与国民经济与社会发展的需要相比,我国铁路无论是规模还是质量都还有很大的差距。
从数量上看,铁路路网密度仍处于较低水平,远落后于发达国家的平均水平;主要运输通道客货运输能力严重不足,制约了国民经济的发展。
从质量上看,铁路的技术装备水平和管理水平与发达国家又较大差距,便捷性、舒适性、准时性、安全性等还远远不能满足旅客和用户的要求。
随着我国铁路体制的改革,在未来很长的一段时间内,铁路建设将是我国经济发展领域中一个非常的亮点。
我们经常会看到世界各国发生列车脱轨翻车的意外事故,如大风、山体滑坡、铁轨弯曲变形等原因造成的列车脱轨、翻车事故层出不穷,造成极大的人身伤亡和经济损失。
而新疆地区地处大漠戈壁,每年受西伯利亚、乌拉尔山冷空气的影响,大风频繁。
强冷空气经过山口时产生狭管效应,风速加大。
同时受新疆北高南低地形影响,大风顺坡而下,锋利强劲。
尤其在兰新线西段百里风区(雅子泉至红旗坎站间)和南疆先百里风区(吐鲁番至鱼儿沟站间),瞬时风速高达64m/s。
据不完全统计,新疆铁路运输因风沙造成的行车安全事故总计38起。
因大风造成的列车停轮次数更是数不胜数,严重影响了铁路运输的效益。
为防止此类事故的发生,迫切需要对机车车辆运行时姿态进行监测,并在车身发生倾斜时能够发出报警信息,提示列车处于不安全状态,提醒司机紧急
制动,防止事故发生。
利用GPS干涉技术测定载体姿态是上世纪90年代的最新成果,GPS姿态测
量系统具有体积小、重量轻、成本低、精度不随时间变化等优点,是其它姿态测
量系统无法比拟的。
除此之外,由于GPS本身就具备了导航定位的能力,GPS 姿态测量系统在航路导航、精密着陆,自动驾驶等其它方面也可以广泛应用。
这意味着,一套GPS姿态测量系统就可以完成当今仪表仓内使用的半数以上设备的功能。
而且GPS姿态测量不像红外那样受扫描范围限制,没有视场和黑夜的限制,
也没有陀螺漂移的问题。
因此,GPS姿态测量具有巨大的应用潜力,是一个新的
姿态测量发展方向。
本项目实现原理为,在列车车厢中部安装监测站,监测站采用两对天线,对称安装在列车中部车辆中轴线两边,通过北斗/GPS接收机采集天线的数据,监测站将采集到的数据传输到数据监控中心平台,数据监控中心平台通过高精度姿态测量算法可计算列车横滚倾斜角度,当列车倾斜角度超过事先预置好的门限值之后,监控平台发出报警信息,提示相关人员列车运行处于危险状态,应立即采取措施。
1.2.国内外研究现状及动态
由于国外的GPS技术发展较早,美国在GPS系统实现民用化以前,就开始进行GPS姿态系统的研究了。
20世纪90年代初,利用GPS载波相位进行运动载体
姿态测量不仅理论上日益成熟,而且Trimble、Adroit system、原Ashtech等公司以及Calgary大学相继研制出GPS姿态测量接收机的样机和产品,并进行了地面试验。
1990年,Adroit system公司和美国战略防御组织(SDIO)研制了利用三个安放在一条直线上的单轴姿态测量系统GPS ADS进行方位角和俯仰角的测量,其精度可达0.0675°。
1992年华盛顿大学应用物理实验室(APL)将原Ashte圮h公司的3DF ADU三姿态测量系统用于美国海军护卫舰VSS并用光学经纬仪和陀螺仪进行比较,姿态精度也达O.1°。
这些系统的试验取得了令人满意的结果,而且上述的部分产品已开始销售,并在陆地和海洋的低动态用户中使用。
随着GPS姿态测量系统产品的问世,许多厂家和研究机构把研究重点转移到提高系统的可靠性、精度、实时跟踪能力等方面。
目前几个具有代表性的研究方
向为:
①算法研究:GPS姿态测量除了硬件设备条件外,关键技术是算法研究和软件
实
现,特别是整周模糊度快速确定算法的研究。
②组合研究:充分发挥GPS姿态测量的优势,与其它姿态测量系统进行组合。
GPS的定位和姿态测量功能与惯性导航系统(INS)或平台罗经系统或其它导航仪器进行组合,特别是全姿态组合和速度组合,可以发挥各自优势。
GPS姿态测量
系统成本低、校准时间短,与INS可以组成价格低、性能高的组合系统。
③超短基线的应用研究:由于GPS的姿态测量精度直接与天线之间的空间距离密
切相关。
从理论上讲,基线越长,姿态测量精度就越高。
但是基线太长,在使用
安装时会受到环境制约,从而限制了系统的应用范围。
如基线太长,一般飞机和
卫星上难以安装,或者安装基线的刚度不够,刚度不够会影响计算精度和实时解
算,特别会影响模糊度解算和多路径效应。
④简化系统结构、进一步降低成本:Komfdd等人提出了用单一天线测量飞机的姿态参数,这使得姿态测量系统的成本大大降低。
该姿态信息与传统的基于机体
坐标系的纵摇和横摇不同,它是基于飞机速度轴的姿态角。
试验结果证明,由单
一GPS天线提供的姿态信息可以作为飞机姿态测量的备份,也可用于原姿态测量
系统的故障诊断。