凯腾CMMB激励器
- 格式:docx
- 大小:902.15 KB
- 文档页数:8
WORD下载可编辑CAV/5U分米波电视激励器用户手册技术资料精心整理WORD下载可编辑技术资料精心整理WORD下载可编辑目录目录。
3 警告。
5 保修。
6 介绍。
7 手册内容。
7 触电救护。
9第一章产品介绍。
13 1.1 简介。
14 1.2 技术指标。
16 1.3 方框图。
18第二章安装。
19 2.1 设备安装。
20 2.2 初装要点。
20 2.3 测试接口。
21 2.4 RS232接口。
21 2.5 操作显示菜单介绍。
22 2.6 保护门限,告警及其设置。
24 2.7 改频步骤。
24 2.8 预防措施。
25 前面板。
26 后面板。
27第三章图表。
29 ATP150A CAV/5U 接线图。
30技术资料精心整理WORD下载可编辑MTF0096AR0 放大模块元件清单。
31 ATP150A CAV/5U 元件清单。
32 SCH0291AR0(主板)。
33- 音频处理电路。
34 - 视频处理电路。
35 - 视频予校正电路。
36 - 音/视频调制电路。
37 - 中频载频振荡电路。
38 - 中频予校正电路。
39 - 中频校正电路。
40 - 上变频电路。
41 - 电源电路。
42 - 校正调试点。
48 - 外部AGC 设置。
58SCH0123AR1(控制板和显示)。
59-调试要点。
62 SCH0136AR0(IV-V波段 VCO器)。
63-调试要点。
63 MTG0050AR0(40Ddb UHF 滤波器)。
66-调试步骤。
66 SCH0300AR0(接口板)。
69 SCA0302AR0(5W 放大模块)。
71 SCA0311AR0(2W 放大模块)。
72E0004 (S-150-24 开关电源)。
73 技术资料精心整理WORD下载可编辑提示本手册所描述的产品在设计和生产中都采用了对用户的保护措施。
在安装,维护和调试时需要关机。
使用者须采取的预防措施为避免高压伤害,操作时请穿着专用衣服,戴保护手套。
注意事项零件清单附在相关电原理图后面,标明每一项的参数、说明以及常用类型。
An Intelligent Wireless Solution forPrecise Robotic Path PlanningCopyright ©E-mail:********************E-mail:********************Tel*************E-mail:********************SCANTECH (HANGZHOU) CO., LTDIntelligent Robotic Path Planning and Guiding SystemScantech’s M-Track is intelligent path planning and guiding system consisting of 3D tracking system, a tool simulator, and path planning software. It serves as robots’ eyes and brains by allowing visual perception, target recognition, and path plan-ning.The system is compatible with different robots and can be widely applied in various sectors with high precision, reliability, and safety. It is capable of planning paths for multiple tasks ranging from object transporting to grinding, coating, and weld-ing for flexible and automatic production.By tracking the path of a tool simulator and obtaining the 6D poses of its TCP, M-Track can achieve quick path planning so that robots can reach the goal position and execute specified tasks. It breaks through the limits posed by high labor costs, inefficient human-machine interaction, and low efficiency, thus greatly enhancing product quality. It is a great helper for manu-facturers to overcome challenges and fulfill daily operations.6D Pose Recognition Automatic Path PlanningIntelligent and Efficient Highly Safe and ReliableM-Track is an optimal solution for manufacturers to plan robotic paths as it is flexible, reliable, and highly adap -tive to environmental changes. It helps robots reach the target position accurately to complete the preset task. By identifying the positions and orientations of a tool simulator in the workspace, M-Track’s tracking system can transmit the information to path planning software. Its path planning software can automatically devise a safe and effective path ready for execution.Based on stereoscopic vision technology, the tracking system can accurately and efficiently capture the path of the tool simulator. It supports the accurate output of 6D poses of the simulator and comprehensively captures the pose of the tool center point.M-Track’s high-precision tracking ensures appropriate path planning and safe operation of robots. Its accuracy reaches 0.064 mm when the tracking range is 10.4 m³ and 0.078 mm when the tracking range is 18 m³.The system can be used directly without complex programming. Its tool simulators 3D printed in the form of actual tools are easy to use. Whether you are a profes-sional engineer and a novice, you can know how to use it regardless of your level of expertise.It can simulate the motion of human operations in a real workspace. Its behaviour-based simulation allows path planning more adaptive to real-world working condi-tions and production needs. The path can be saved for future use with just a few clicks.The automated smart robot path planning system comprises perception, planning, and execution modules, which cater to different applications such as grinding, coating, welding, and more. The robotic path planning software is compatible with various robots, including ABB, KUKA, FANUC, and EFFORT. It supports the planning of lines, curves, etc. Be it indoor or outdoor, structured or unstructured environment, it is capable of meeting different requirements for differ-ent industrial scenarios.Intelligent and Efficient Path PlanningAccurate 6D Pose TrackingConvenient and User-friendly OperationHighly Adaptive for Vast ApplicationsWorkflow1. Easy Deployment:quick set-up to cater to vast scenariosguide the robot with a tool simulator whose6D poses are obtained by 3D tracking systemsoftware sets a path for the robot based on the 6D posesrobot travels the planned path and completes tasks2. Manual Teaching:3. Intelligent Path Planning:4.Task Execution:Technical Specification10.4 m³Tracking frequencyTool simulator60 HzCustom-10 ℃-40 ℃ABB/KUKA/FANUC/EFFORT, etcRobot models supported 0.064 mm M-Track Intelligent Robotic Path Planning and Guiding System0.078 mm 18 m³Operating temperatureTracking accuracyType。

马达控制器CMMB-AS-0x说明装配和安装用于马达控制器CMMB-AS-0x81891152023-01c[8189123]原版操作手册的译本CMMB-AS-0x危险标识和避免危险的提示:危险导致重伤甚至死亡的直接危险警告可能造成重大伤亡的危险小心可能造成轻伤或严重财产损失的危险其它符号:注意财产损失或功能丧失其它文件中的建议、提示、参考必需或适用的附件环保使用说明文本标记:•可按任意顺序进行的工作1.应该按规定顺序进行的工作–一般举例项处理结果/详细信息参考版本修订记录版本章节日期更改内容1.0 全文2017-03-21 第一版1.01 3.2.4,5.5.1,5.5.4 2017-4-27 图 3-5描述修正。
5.5.1与5.5.4部分内容描述修正。
1.02 1.1.2,2.1.3,3.1.1,3.2.22017-07-19 部分内容描述修正。
1.03 6.4.1 2017-10-11 图6-2升级,且新增其图中的部分描述。
1.042.1 2023-01-11图2-2 升级, 表2-2、2-3、2-4新增部分内容3.2.4 2023-01-11表3-4部分内容描述修正,图片3-5升级4.3.2 2023-01-11 表4-2部分内容描述修正6.1 2023-01-11 表6-2部分内容描述修正9.4 2023-01-11 表9-4 d4.01 内容修正9.5 2023-01-11 表9-5增加部分内容11 2023-01-11 增加新章节1.0510.2 2023-01-11 增加ID定义描述6.1 2023-01-11 表6-2部分内容描述修正目录第1章产品使用安全和要求 (1)1.1安全 (1)1.1.1调试、维修和试运行的安全注意事项 (1)1.1.2通过保护特低电压(PELV)防止电击的保护措施 (1)1.1.3按规定使用 (1)1.2产品使用前提条件 (2)1.2.1运输和仓储条件 (2)1.2.2技术前提 (2)1.2.3专业人员的资质(人员的要求) (2)1.2.4应用范围及认证 (2)第2章产品介绍 (3)2.1产品概述 (3)2.1.1CMMB 马达控制器 (3)2.1.2EMMB 伺服马达 (3)2.1.3 NEBM 线缆 (4)2.2结构图 (6)第3章 CMMB 马达控制器安装 (7)3.1结构安装 (7)3.1.1环境要求 (7)3.1.2装配条件 (7)3.2电气安装 (8)3.2.1CMMB 系列马达控制器正面图 (8)3.2.2电源端子( X2 ) (9)3.2.3 RS232串口(X3 ) (9)3.2.4外部输入输出端子(X4) (10)3.2.5 编码器输入(X5) (11)3.3 CMMB 伺服系统接线图 (12)3.3.1 保险丝,刹车电阻和断路器选型 (13)第4章通过LED面板设置控制器 (13)4.1面板操作 (14)4.2面板菜单结构与导航 (15)4.3 Easy Use 功能 (15)4.3.1 Easy Use功能设置过程 (16)4.3.2 EASY菜单结构与描述 (17)4.3.3tunE菜单的结构与功能描述 (23)4.3.4点动模式(F006) (26)4.3.5 历史错误 (F007) (26)第5章 CMMB CONFIGURATOR操作指南 (27)5.1入门指南 (27)5.1.1语言 (27)5.1.2打开和保存工程文件 (28)5.1.3打开通信 (28)5.1.4 站号和波特率 (28)5.1.5对象(添加、删除、帮助) (29)5.2初始化/保存/重启 (29)5.3固件下载 (29)5.4 读/写马达控制器配置 (30)5.4.1 读马达控制器配置 (30)5.4.2 写马达控制器配置 (31)5.5 数字IO设置 (31)5.5.1 数字输入 (32)5.5.2 数字输出 (34)5.5.3 电子齿轮比切换 (高级应用) (35)5.5.4 增益切换(高级应用) (36)5.5.5快速捕捉 (37)5.6 示波器 (38)5.7 故障与历史故障 (40)第6章工作模式与控制模式 (42)6.1 开始控制模式的般步骤 (42)6.2 速度模式(-3、3) (45)6.2.1 模拟速度模式 (46)6.2.2 DIN速度模式 (47)6.3 力矩模式(4) (48)6.3.1 模拟力矩模式 (48)6.4 位置模式(1) (49)6.4.1 位置表模式 (49)6.5 脉冲模式(-4) (53)6.5.1 主从跟随模式 (54)6.6 原点模式(6) (55)7.1.1 自整定参数 (64)7.1.2 通过LED面板与工程软件开启自整定 (64)7.1.3自整定失败处理 (65)7.1.4 自整定后调整 (65)7.2手动整定 (66)7.2.1速度环调整 (66)7.2.2 位置环调整 (68)7.3影响调整结果的因素 (70)第8章报警及故障检修 (71)第9章 CMMB系列马达控制器参数列表 (73)9.1 F001 (73)9.2 F002 (74)9.3 F003 (76)9.4 F004 (80)9.5 F005 (82)第10章通讯连接 (83)10.1 RS232 接线定义 (83)10.1.1引脚定义 (83)10.1.2 多机级联接线定义 (83)10.2 传输协议 (83)10.2.1 一对一通讯协议 (84)10.2.2 多点级联协议 (84)10.3数据协议 (84)10.3.1写入(主站到从站) (85)10.3.2读取(从站到主站) (85)10.4 RS232 通讯例子 (86)第11章附录 (87)11.1 CMMB 支持的多圈编码器 (87)11.1.1 硬件要求 (87)11.1.2 应用场景 (87)第1章产品使用安全和要求1.1安全1.1.1调试、维修和试运行的安全注意事项警告电击危险– 电缆一定要安装到插座X2 –连接电缆时,务必断开电源触碰带电部件会引起严重的人身伤害,并可能导致死亡。
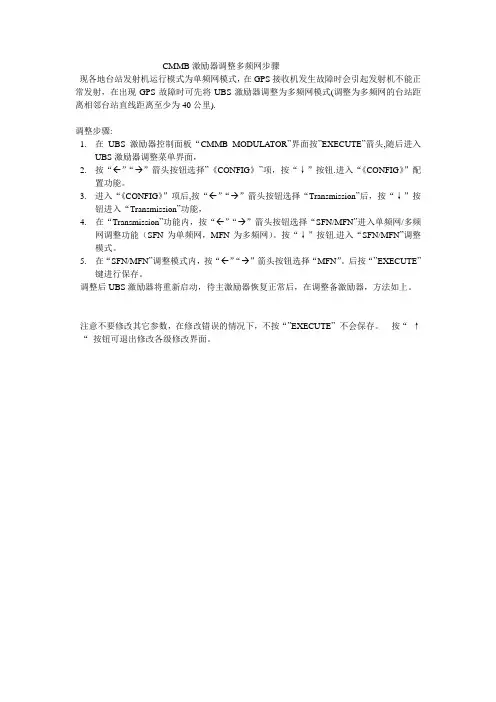
CMMB激励器调整多频网步骤
现各地台站发射机运行模式为单频网模式,在GPS接收机发生故障时会引起发射机不能正常发射,在出现GPS故障时可先将UBS激励器调整为多频网模式(调整为多频网的台站距离相邻台站直线距离至少为40公里).
调整步骤:
1.在UBS激励器控制面板“CMMB MODULATOR”界面按”EXECUTE”箭头,随后进入
UBS激励器调整菜单界面,
2.按“←”“→”箭头按钮选择”《CONFIG》”项,按“↓”按钮.进入“《CONFIG》”配
置功能。
3.进入“《CONFIG》”项后,按“←”“→”箭头按钮选择“Transmission”后,按“↓”按
钮进入“Transmission”功能,
4.在“Transmission”功能内,按“←”“→”箭头按钮选择“SFN/MFN”进入单频网/多频
网调整功能(SFN为单频网,MFN为多频网)。
按“↓”按钮.进入“SFN/MFN”调整模式。
5.在“SFN/MFN”调整模式内,按“←”“→”箭头按钮选择“MFN”。
后按“”EXECUTE”
键进行保存。
调整后UBS激励器将重新启动,待主激励器恢复正常后,在调整备激励器,方法如上。
注意不要修改其它参数,在修改错误的情况下,不按“”EXECUTE”不会保存。
按“↑“按钮可退出修改各级修改界面。
大理苍山电视转播台1KWCMMB电视发射机监控系统作者:李春泽杨志虎杨镜卉来源:《中国科技纵横》2013年第09期【摘要】 MS Visual C#是微软公司针对.NET产品的开发工具,但其在Windows桌面程序的开发上也不逊色于Visual Basic和Borland Delphi,较之于Visual C++更是提供了丰富的控件。
基于本程序是一个小型的Windows运用程序,因此我们决定采用MS Visual C# 2008来编写,也是使用MS Visual C# 2008编写Windows运用程序的一种尝试。
【关键词】 MS Visual C# 2008 FOM1与FOM2数据通信数字移动电视节目作为大理苍山电视转播台的增值业务引入我台,为保障节目的正常播出和播出设备的正常运行,需对播出设备实施计算机远程监测和控制。
为此,我们开发了针对我台的凯腾1KW CMMB电视发射机的计算机远程控制系统。
1 系统原理1.1 系统硬件(见图)系统结构图本系统中,监测、控制计算机采用兼容的商用计算机,其RS232口转换为RS485后与发射机的主控单元的RS485接口连接,监测、控制计算机以C/S方式接入网络。
1.2 系统软件本系统程序运行环境为Windows XP Professional或Windows7旗舰版,程序是使用MS Visual C#2008编写 Windows 桌面程序。
MS Visual C#是微软公司针对.NET产品的开发工具,但其在Windows桌面程序的开发上也不逊色于Visual Basic和Borland Delphi,较之于Visual C++更是提供了丰富的控件。
基于本程序是一个小型的Windows运用程序,因此我们决定采用MS Visual C# 2008来编写,也是使用MS Visual C# 2008编写Windows运用程序的一种尝试。
程序编写采用多窗口结构(见图):主窗口;激励器窗口;电源模块窗口;功率模块窗口。

CMMB单频网组网技术贾大武【摘要】首先介绍了单频网的基本结构,然后简要说明了单频网的基本原理和特点,最后阐明了单频网如何布网和对其性能的简单测试【期刊名称】《中国传媒科技》【年(卷),期】2013(000)008【总页数】2页(P171-172)【关键词】单频网;效率;信号;网络【作者】贾大武【作者单位】山西省运城市广播电视台,山西运城 044000【正文语种】中文单频网是指整个发射网中的所有发射机在允许的范围内同时发射同样频率同样内容的信号,架设单频网的目的是扩大单个发射机的覆盖范围,实现对一定范围(一个城市或一个地区)的可靠覆盖。
1 CMMB单频网基本结构CMMB单频网主要由网络前端、传输网及数字发射机组成,其基本结构如下图所示:现分述其各部分具体组成及功能1.1 网络前端网络前端主要由卫星接受机、GPS接收机、编码器、交换机、复用器和码流监测器等组成,其主要功能是对接收到的视音频信号和数据信号进行编码复用,然后把具有同步信息的多路节目传输流信号输出给传输网。
以我台前端为例其框图如下图所示:1.1.1 编码器其主要功能是对模拟的视频信号进行编码处理组成H.264码流格式对模拟的音频信号进行编码处理组成数字AAC++码流格式然后整合视频和音频数据成为同步的节目码流按照相应格式输出给复用器。
我台用的北京创毅视讯公司的编码器采用最新的算法,可支持多种时隙(1时隙、2时隙、4时隙)的码率输出,也可通过手动设置灵活设置输出码率。
另外增加了添加台标和字幕的功能,可对添加的播出效果进行预览,而且台标和字幕支持真彩色.并且视频支持模拟复合信号输入和数字SDI信号输入及预处理功能(图像调整、噪声过滤、亮度,对比度调整),音频支持数字AES-EBU和嵌入SDI音频输入及立体声音频编码。
1.1.2 复用器其主要功能是将多路节目及数据码流复用在一个数据码流中然后用一个符合要求的接口把数据输出出去,技术上其支持时间分片技术集成,支持在一个无线信道里应用不同的调制模式。
CMMB激励器global--status页面详解下面我们针对于CMMB激励器的status下的global status页面的各种状态做一个详细的说明,此版本针对于software:4184;fpga:7122。
其他版本可能会有不同。
目录1、Serial Numbers and Versions (2)2、Transmission (2)3、Input (2)4、TOD and Record Status (2)5、RF Frequency Shift Compensation (2)6、Output (2)7、Precorrector (3)8、Network (3)9、Alarms (3)3、Input栏目下显示了外部输入信号的状态,此状态的介绍详见下表,该状态准确实时的反映了外部信号,可作为系统维护和检测时的参考依据。
注意:上述的10MHz外部输入信号主要来自GPS卫星接收机或者来自其他外置精密参考源。
在激励器工作时一定要保证GPS卫星接收机或者来自其他外置精密参考源的工作稳定,关闭系统时一定要保证先关激励器或者发射机,然后再关闭GPS卫星接收机或者来自其他外置精密参考源,否则将会造成发射机的损坏。
4、TOD and Record Status栏目下主要显示了TOD信息和录制码流的状态,此状态可以在SFN时作为评判的TOD信号有无的判断依据。
另外,Stream record status显示了激励器有无录制测试码流的状态(20S)。
5、RF Frequency Shift Compensation栏目下显示了调制器目前频率补偿量,用于调制器在CW模式下频偏的补偿。
6、Output栏目下显示了激励器的输出状态,IF Status可以作为判断有无RF的依据,如显示unmuted则表示有RF输出,如果用频谱仪测量无频谱输出则请您及时与我们取得联系。
IF Mute ON/OFF;IQ Swap;Spectrum Inversion默认均为OFF。
KFM-Ⅱ-813型CMMB电视发射机性能分析与维护靳善波;卢优胜【摘要】阐述对移动多媒体广播电视中的发射系统采用的KFM-Ⅱ-813型UHF1kW电视发射机的性能分析与维护.【期刊名称】《中国传媒科技》【年(卷),期】2012(000)014【总页数】2页(P152-153)【关键词】CMMB电视发射机;激励器;功放;维护【作者】靳善波;卢优胜【作者单位】濮阳电视台,河南濮阳457000;濮阳电视台,河南濮阳457000【正文语种】中文濮阳电视台发射的数字移动多媒体广播电视(简称CMMB),根据城区面积状况,采用单发射站点完成城区的基本覆盖。
单发射站点系统主要由卫星接收系,卫星数据接收机,交换系统,CMMB复用器,发射系统组成。
濮阳CMMB发射机的工作频率为38 CH,发射功率为1 KW,发射机采用成都凯腾四方数字广播电视设备有限公司生产的KFM-Ⅱ-813型UHF1kW CMMB电视发射机。
发射机由主、备数字激励器,双激励切换器,1∶4功率分配器,4×300W功率放大器,4∶1功率合成器,4×2000W开关电源,吸收负载,带通滤波器,定向耦合器,触摸屏监控单元,风机单元和交流配电盘等组成。
定向耦合器和带通滤波器装在机柜的顶部。
发射机可实现主、备激励器之间人工或自动切换。
切换状态由主机触摸屏和切换器面板指示灯显示,切换器具有状态保持功能,当断电恢复或关机后重新开机时,将保持原切换状态。
发射机采用触摸屏监控单元实现主机和各功能组件的集中监控管理。
触摸屏监控单元既能对主机输出功率、反射功率、供电状态、冷却状态、连锁状态、切换状态实时监控,又能对每个激励器、每个300W功放插件、每个开关电源的工作状态和工作参数实时监控。
并可实现输出过荷、驻波比过大、冷却异常、连锁异常、功放过热等故障告警和保护。
发射机输入的ASI信号经激励器处理后送入切换器,切换器的输出经四分配器将信号分为4路,分别去推动4个相同的300W功率放大器,功率放大后的4路信号经功率合成后由定向耦合器和带通滤波器送给发射天线。
CMMB终端测试-操作手册一、场地布置(一)打开所有仪器,预热30分钟左右,保证测试精度(为防止信道仿真器死机,室温设在22℃以下)。
把发射天线调节为垂直极化,高度调节为1.58m,转台位置设置为358.5°。
(二)布置暗室,被测手机按规范布置,并及时拍照,记录温湿度,最后确认暗室的环境与布置无问题。
调节摄像头至合适位置(三)检查控制室连线关闭所有干扰源,功分器噪声输入端一定不能开路。
二、测试准备(一)设置:发射源、信道仿真器、频谱仪。
发射源:主要是设置复用器控制软件。
包括:IP设置(192.168.1.53)、中心频率设置、连接复用器1,再点数据观察,发送数据应该在2万以上。
信道仿真器:调用CMMB模板,具体设置为:INPUT:Tx Power :-7Tx Crest Factor:12。
AWGN:Bandwidth 10MHz。
Output Sum 2:设置信号时把噪声设为-100。
频谱仪设置:(在后面的测试过程中如果发现频谱仪上的信号值过高,可调节参考电平为-10dBm。
)(二)系统稳定性检验1、底噪值:关闭信号和噪声,信号设置-30 ,噪声设置-100,读取底噪值应为-80.0±0.2 dBm2、打开信号,关闭噪声。
信号设置-25 ,噪声设置-100时信号值应-42.2±0.2。
3、使用一段时间内,信道仿真器不出现故障提示。
三、正式测试(一)灵敏度一定要设置为1-tap信道,并保存、点击“Build”。
(尤其是先把530MHz所有性能测试完之后测666MHz与754MHz时,注意要设置为1-tap信道!)调节频率:需要更改三个位置的频率(激励器、信道仿真器、频谱仪)。
噪声设置为-100并关闭。
只需不断降低信号,直至达到临界情况。
(二)载噪比C/N(固定信号调干扰)在不同信道下,根据所测灵敏度的大小确定信号强度(当灵敏度较好时,即FSU<-50dB,仿真器信号强度设为-25dB;灵敏度较差时,即FSU≥-50dB,仿真器信号强度设为-23dB)。
大理苍山电视转播台1KWCMMB电视发射机监控系统【摘要】 ms visual c#是微软公司针对.net产品的开发工具,但其在windows桌面程序的开发上也不逊色于visual basic和borland delphi,较之于visual c++更是提供了丰富的控件。
基于本程序是一个小型的windows运用程序,因此我们决定采用ms visual c# 2008来编写,也是使用ms visual c# 2008编写windows 运用程序的一种尝试。
【关键词】 ms visual c# 2008 fom1与fom2数据通信数字移动电视节目作为大理苍山电视转播台的增值业务引入我台,为保障节目的正常播出和播出设备的正常运行,需对播出设备实施计算机远程监测和控制。
为此,我们开发了针对我台的凯腾1kw cmmb电视发射机的计算机远程控制系统。
1 系统原理1.1 系统硬件(见图)系统结构图本系统中,监测、控制计算机采用兼容的商用计算机,其rs232口转换为rs485后与发射机的主控单元的rs485接口连接,监测、控制计算机以c/s方式接入网络。
1.2 系统软件本系统程序运行环境为windows xp professional或windows7旗舰版,程序是使用ms visual c#2008编写 windows 桌面程序。
ms visual c#是微软公司针对.net产品的开发工具,但其在windows桌面程序的开发上也不逊色于visual basic和borland delphi,较之于visual c++更是提供了丰富的控件。
基于本程序是一个小型的windows运用程序,因此我们决定采用ms visual c# 2008来编写,也是使用ms visual c# 2008编写windows运用程序的一种尝试。
程序编写采用多窗口结构(见图):主窗口;激励器窗口;电源模块窗口;功率模块窗口。
程序主要模块:form1.cs:主窗口c#程序,其主要功能:实时采集发射机数据并处理;发射机各模块数据保存到对应的类中;根据数据处理结果对故障信息发出声音和故障灯报警提示并对故障事件写入数据库;接收用户开机操作命令完成对发射机开机操作,并将操作事件写入数据库;接收用户关机操作命令完成对发射机关机操作,并将操作事件写入数据库;实时查询数据库中记录的故障事件和操作时件。
DVU5000(CMMB)激励器前面板的简单介绍 UBS数字电视激励器前面板的控制与操作采用了极为灵活和更加富有人性化的设计,控制与操作十分的方便。
下面我们对激励器的前面板进行一个简单的介绍。
前面板的LCD液晶屏采用双排字符显示,共有“上,下,左,右”四个导航键和一个确认键“EXECUTE”组成。
导航键的“上键”为“退出”和诸如修改“频率”,“功率电平”,以及“IP地址”和“子网掩码”等数字的“增加”的修改。
导航键的“下键”为“进入”和诸如修改“频率”,“功率电平”,以及“IP地址”和“子网掩码”等数字的“减少”的修改。
另外,“上键”和“下键”也可以循环显示激励器的各种状态。
导航键的“左键”和“右键”分别进行菜单项目的“左右循环移动”。
“EXECUTE”键为“确认”或者“选择”功能的操作。
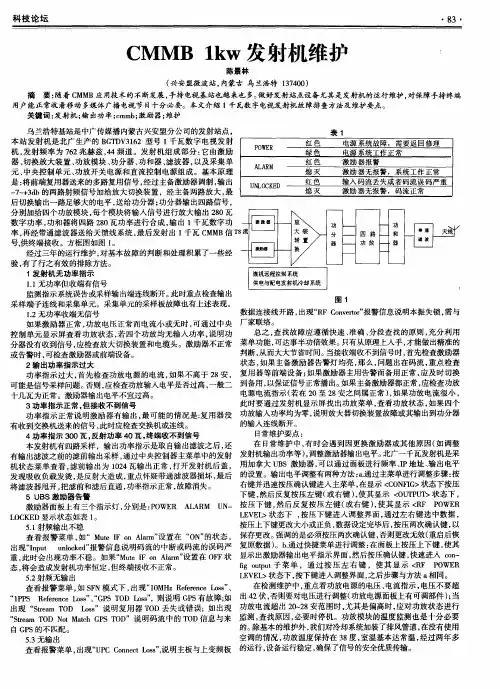
关于右面的3个竖排的LED指示灯均采用双色设计,其具体的功能如下表所示:
激励器的前面板的控制与操作采用树形的结构设计,其操作极为合理。
具体请详见菜单结构。
导航键的“上键”和“下键”可以循环显示激励器的各种状态
“a Transmission Status”,“b Input Status”,“c Output Status”,“d Software versions”,“e Alarms Status”,“f IP Management status”,“g StreamTOD status”,“h GPS TOD status”,“I StreamRecord status”,“J IF OUT Freq”“K RF Freq”。
CMMB 激励器操作说明书
KFMJ-Ⅱ-805型移动多媒体广播激励器
操作、使用及维修说明书
共8
凯腾四方数字广播电视设备
一.操作说明
开机后,激励器显示屏会进入主界面显示如下数据,用户可以通过此界面一目了然的观
察设备目前的工作状态。
图一.显示菜单主界面
其中:
◆MFN:表示系统处于 MFN 或 SFN 状态
◆PPS_Lose:表示 GPS 秒脉冲的状态,当正常是显示 PPS_Lock
◆TOD_Lock_Sync:TOD 工作状态,当来自 GPS 的 TOD 输入正常的时候,中间显示
Lock,当 TOD 输入异常时显示 Lose,当码流中的 TOD 信息和来自 GPS 的 TOD 输入同步的时候,第三个单词显示 Sync,当不同步时显示 UnS.
◆ASI1_In:码流输入状态,当 ASI1 输入正常时显示 ASI1_In,当 ASI1 输入正常时显示
ASI2_In,当无输入时显示 ASI1_error
◆Losing Lock:此信息表示设备本振工作状态,当失锁时显示如图,当正常是显示
PLL_Lock
◆CF: 500.000000MHz:表示激励器射频输出频率
下图为系统主菜单
图二.主菜单
1.信道编码与调制
当光标出现在信道编码与调制上时,按确认键,将看到下级菜单,按上、下键用于翻转,可见下面一些参数
随机化模式
RS 编码模式:
交织模式:
LDPC 码率
信道编码与调制星座映射:
输入模式设置:
SFN/MFN选择:
SFN 时延:
标识幅度:
信道参数设置方法:复用器/激励器等参数
◆信道参数配置方式可以为:复用器配置或激励器配置,一般使用都为复用器配置,一但
设置为复用器配置,随机化模式,RS 编码模式,交织模式,LDPC 码率,星座模式这些参数将通过码流在将复用器的设置好的参数设置下来,为了保证系统工作的稳定性,用户在使用时不得随便改变此设置。
其中:
◆随机化模式:复用器配置参数
◆RS 编码模式:复用器配置参数
◆交织模式:复用器配置参数
◆LDPC 码率:复用器配置参数
◆星座模式:复用器配置参数
◆输入模式设置:CMMB
CMMB 激励器操作说明书
◆SFN/MFN 选择:设置系统是工作在单频网模式还是多频网模式
◆SFN 时延:±500ms
◆标识幅度:此设置项用于单频网调试时使用,正常为 1,只有在管理员模式才能更改
◆信道参数设置方法:复用器/激励器
2.系统参数设置
当光标出现在系统参数设置上时,按确认键,将看到下级菜单,按上、下键用于翻转,可见射频频率、输出工作模式、输出电平设置、ASI 设置方式、输入接口设置、输出频谱设置、全释放功率中频功率、告警处理模式、线性校正、非线性校正、恢复出厂设置、发射机标识、本机标识、激励器地址等参数。
射频频率:
输出工作模式:
输出电平设置:
ASI 设置方式:
输入接口设置:
系统参数设置输出频谱设置:
全释放功率中频功率
告警处理模式
线性校正非线性校正:
恢复出厂设置:
发射机标识:
地区标识:
激励器地址:
以射频频率、频率偏移为例,系统参数设置过程如下:
(1)进入菜单
图三设置频率菜单
(2)按下确认键
CMMB 激励器操作说明书
图四设置频率菜单 1 (3)按左右键选择需要修改的频率位数,按上下键修改数值
图五设置频率菜单 2 (4)按确认键确认
图六设置频率菜单 3 注:若修改参数后未按下菜单键,则参数不被设置、保存。
其中:
射频频率:可调整射频频率
CMMB 激励器操作说明书
◆输出工作模式:可选择连续调制/载频输出/触发调制
◆输出电平设置:可选择 0-100%
◆ASI 设置方式:可选择手动/自动
◆输入接口设置:可选择 ASI1/ASI2/PN9/PN15/PN23
◆输出频谱设置:可选择正常/双音测试信号/频谱翻转
◆全释放功率中频功率:此设置项关系为管理员设置项,目的是使设备到最佳工作状态◆告警处理模式:模式一/模式二,此设置项用于设置出现报警的后续处理模式。
模式一:
出现报警信息任然保持 RF 输出,报警信息消失 30 秒激励器自动软复位一次;模式二:报警信息持续 30 秒后渐进关断,报警信息消失 30 秒激励器渐进恢复 RF 输出。
◆线性校正:可选择校正/关闭
◆非线性校正:可选择校正/关闭
◆恢复出厂设置:可选择是否恢复出厂设置
◆发射机标识:可选择 000~127
◆本机标识:可选择 128~255
◆激励器地址:0-255
3.系统状态
当光标出现在系统状态上时,按确认键,将看到下级菜单,按上、下键用于翻转,可见
封锁状态、电压监测、系统延时监测、用户状态、系统温度、版本、设备串号、ASI 输入状态、SFN 状态、TOD 状态、过激励状态、过荷状态、本振锁定状态、系统温度状态等参数。
封锁状态:
电压监测:
系统延时监测:
用户状态:
系统温度:
版本:
系统状态设备串号:
ASI 输入状态:
SFN 状态:
TOD 状态:
过激励状态:
过荷状态:
本振锁定状态:
系统温度状态:
其中:
◆封锁状态:显示正常/封锁,封锁的时候表示设备故障或整机故障
CMMB 激励器操作说明书
◆电压监测:+28V 电压监测/+12V 电压监测/+5V 电压监测
◆系统延时监测:监测 Sdelay/Ldelay
◆用户状态:显示管理员及密码 eKt:Cmmb
◆系统温度:正常情况下显示 15℃~40℃
◆版本:显示软件版本和 IC 版本
◆设备串号:每一台设备都有唯一的设备串号
◆ASI 输入状态:显示 ASI 输入正常/错误
◆SFN 状态:显示 SFN 正常/错误
◆TOD 状态:显示系统不使用 TOD 信号
◆过激励状态:显示正常/过荷
◆过荷状态:显示正常/过荷
◆本振锁定状态:显示 PLL1 正常/失锁PLL2 正常/失锁
◆系统温度状态:显示正常/过荷
4.其他显示信息
图七提示关闭信息
图八屏保(关闭屏幕)
由于显示屏上显示像素长期点亮会失效,影响显示屏的寿命。
在设置菜单中若长时间不按键,系统自动返回“主要状态显示菜单”。
经过一段时间后若还未有按键按下,系统会在一段时间后显示关闭屏幕的提示信息,30 秒后若还未按键,系统会关闭显示屏。
屏幕关闭
CMMB 激励器操作说明书
后按菜单键后返回“主要状态显示菜单”,按菜单键进入“主菜单”,继续按菜单键反复切换。
二使用与维护
⏹使用本手册所述的仪器只能由经过适当培训的人员进行。
对暴露设备的调整、保养、
及维修只能由了解工作所涉及危险的合格人员进行。
⏹机器运到用户后,首先应检查外观有无损坏,机器部有无脱焊、短路等异常现象。
检查供电电源:确认为单相 220V±20V,并使电源插座接地线有良好接地,不可悬空,以确保人身安全。
⏹整机输出在工作状态下不可开路或短路,必须保证接有负载(50Ω),否则可能使
机器工作不正常甚至损坏功放管。
⏹在确认机器处于正常状态后方可上电。
上电后电源开关指示灯亮,发光二极管代表
意义见前面板示意图。
⏹电源灯不亮则应该检查外接电源。
通信不正常则检查输出 232/485 接口连线是否接
反。
按键不正常应该检查连线。
⏹前面板 5 个指示等的含义见前面板示意图,如果在使用过程当中报警指示灯(第三
个灯)亮的时候,表示系统某些地方有故障或设置错误,此时应该进入系统状态菜
单查看系统状态,在正常状态下,当有码流输入时 PMS 指示灯亮(绿),当系统
设置为单频网状态时 SFN 指示灯亮(绿),当外 10M 输入时 10M 指示灯亮
(绿),当 1PPS 信号正常输入时 1PPS 指示灯亮(绿)
⏹出现故障时,可单独接入负载(50Ω/5W)检修,如果发现器件(如保险丝等)损
坏,更换同型号器件即可。
检修中应小心慎重,特别是可调元件(如可调电容、电
位器等)不可随意调动,以避免故障扩大。
如果问题严重时应与厂家联系。
⏹产品不得受潮、雨淋,保持环境整洁、通风、机灰尘应定期清除,机房最好安
装空调,确保设备工作条件最佳。
⏹机不得流入液体及进入各种异物。
设备出厂时,随机检测记录记载了必要的检测及指示值,对使用和维护具有一定的参考值,希妥善保存。