传递函数
- 格式:ppt
- 大小:402.50 KB
- 文档页数:18
2-6 传递函数求解控制系统的微分方程,可以得到在确定的初始条件及外作用下系统输出响应的表达式,并可画出时间响应曲线,因而可直观地反映出系统的动态过程。
如果系统的参数发生变化,则微分方程及其解均会随之而变。
为了分析参数的变化对系统输出响应的影响,就需要进行多次重复的计算。
微分方程的阶次愈高,这种计算愈复杂。
因此,仅仅从系统分析的角度来看,就会发现采用微分方程这种数学模型,当系统阶次较高时,是相当不方便的。
以后将会看到,对于系统的综合校正及设计,采用微分方程这一种数学模型将会遇到更大的困难。
目前在经典控制理论中广泛使用的分析设计方法——频率法和根轨迹法,不是直接求解微分方程,而是采用与微分方程有关的另一种数学模型——传递函数,间接地分析系统结构参数对响应的影响。
所以传递函数是一个极其重要的基本概念。
一、传递函数的概念及定义在[例2-7]中,曾建立了RC 网络微分方程,并用拉氏变换法对微分方程进行了求解。
其微分方程(2-44)为)()(t u t u dtdu RC r c c =+ 假定初始值0)0(=c u ,对微分方程进行拉氏变换,则有)()()1(s U s U RCs r c =+网络输出的拉氏变换式为)(11)(s U RCs s U r c += (2-48)这是一个以s 为变量的代数方程,方程右端是两部分的乘积;一部分是)(s U r ,这是外作用(输入量)的拉氏变换式,随)(t u r 的形式而改变;另一部分是11+RCs ,完全由网络的结构参数确定。
将上式(2-48)改写成如下形式 11)()(+=RCs s U s U r c 令11)(+=RCs s G ,则输出的拉氏变换式可写成 )()()(s U s G s U r c =可见,如果)(s U r 给定,则输出)(s U c 的特性完全由)(s G 决定。
)(s G 反映了系统(网络)自身的动态本质。
这很显然,因为)(s G 是由微分方程经拉氏变换得到的,而拉氏变换又是一种线性变换,只是将变量从实数t 域变换(映射)到复数s 域,所得结果不会改变原方程所反映的系统本质,对照)(s G 与原微分方程(2-44)的形式,也可看出二者的联系。
传递函数的推导一、引言在探索传递函数的推导之前,让我们先明确一下什么是传递函数。
传递函数是用来描述输入和输出之间关系的数学表达式,它可以帮助我们理解信号在系统中的传输过程。
本文将以人类的视角,通过简单的例子来推导传递函数的方法,以增强读者的理解。
二、例子引入假设我们有一个简单的系统,输入信号为一个正弦波,输出信号为经过系统处理后的波形。
我们的目标是找到输入和输出之间的数学关系,也就是传递函数。
三、推导过程我们首先假设输入信号为x(t),输出信号为y(t)。
根据系统的特性,我们可以得到如下的微分方程表达式:dy(t)/dt + a*y(t) = b*x(t) (1)其中,a和b是常数,表示系统的参数。
为了求解传递函数,我们需要对方程(1)进行变换。
我们对方程(1)两边同时进行拉普拉斯变换,得到:s*Y(s) + a*Y(s) = b*X(s) (2)其中,s是拉普拉斯变量,X(s)和Y(s)是X(t)和Y(t)的拉普拉斯变换。
接下来,我们将方程(2)重排,得到传递函数H(s)的表达式:H(s) = Y(s)/X(s) = b/(s + a) (3)至此,我们推导出了传递函数H(s)的表达式,它描述了输入信号和输出信号之间的关系。
在频域上,传递函数H(s)表示了系统对不同频率信号的传输特性。
四、总结通过以上推导过程,我们得到了传递函数的表达式。
传递函数是一种重要的工具,它可以帮助我们分析和设计各种信号处理系统。
通过理解传递函数的推导方法,我们可以更好地理解信号在系统中的传输过程,从而更好地应用于实际工程中。
以上就是传递函数的推导过程,希望本文能够帮助读者理解传递函数的概念和推导方法。
传递函数的推导是一个重要的数学工具,它在信号处理和系统控制等领域有着广泛的应用。
通过深入研究和应用传递函数,我们可以更好地理解和掌握信号处理和系统控制的原理和方法。
希望读者能够通过本文对传递函数有更深入的认识,并在实际工作中灵活运用。
传递函数的c语言实现摘要:1.传递函数简介2.传递函数的C语言实现a.函数声明与参数定义b.计算传递函数的C语言实现c.代码实例及运行结果3.总结与展望正文:传递函数在控制理论和工程领域中具有广泛的应用,它用于描述输入信号与输出信号之间的关系。
在实际应用中,传递函数可以用于控制系统设计、信号处理和通信系统分析等领域。
本文将介绍如何使用C语言实现传递函数。
首先,我们需要了解传递函数的基本概念。
传递函数是一个数学模型,用于描述输入信号x(t)与输出信号y(t)之间的关系,可以用以下公式表示:Y(s) = A(s) / (1 + βA(s))其中,s是拉普拉斯变换域变量,A(s)是开环增益,β是反馈因数。
传递函数的阶数是A(s)的最高次数。
接下来,我们将介绍如何使用C语言实现传递函数。
首先,我们需要声明一个函数,接收输入信号、开环增益和反馈因数作为参数。
函数声明如下:```cdouble transfer_function(double input, double gain, doublefeedback) {// 函数实现}```接下来,我们实现传递函数的计算。
这里我们采用部分分式法将传递函数分解为多个简单的多项式,然后计算每个多项式的值。
具体实现如下:```cdouble transfer_function(double input, double gain, double feedback) {// 计算开环增益A(s)double A_s = gain / (1 + feedback * gain);// 计算传递函数的零点和极点double zeros[3] = {0, -feedback / gain, 1 / gain};double poles[3] = {0, -1, 0};// 使用部分分式法计算传递函数double result = 0;for (int i = 0; i < 3; i++) {double denominator = 1;for (int j = 0; j < 3; j++) {if (i != j) {denominator *= (s - zeros[j]) / (s - poles[j]);}}result += input * (s - zeros[i]) / (s - poles[i]) * (1 / denominator);}// 拉普拉斯反变换,得到输出信号y(t)double output = 0;for (int i = 0; i < 3; i++) {output += zeros[i] * exp(-feedback * input * i) / (i * factorial(i));}return output;}```为了验证我们的实现,我们可以通过一个简单的例子进行测试。
传递函数求导数摘要:一、传递函数定义1.传递函数的背景和意义2.传递函数的数学表达式二、传递函数求导数的方法1.利用链式法则求导2.利用隐函数求导法则求导3.利用参数方程求导法则求导三、求导数的实际应用1.控制系统分析2.信号处理3.通信系统设计正文:传递函数是控制理论、信号处理和通信系统设计等领域中一个非常重要的概念。
它描述了输入信号与输出信号之间的关系,可以用来分析系统的稳定性和动态性能。
本文将介绍如何求传递函数的导数,并探讨其在实际应用中的重要性。
首先,我们需要了解传递函数的定义。
传递函数是指输入信号x(t) 与输出信号y(t) 之间的关系,可以用数学表达式G(s) = Y(s)/X(s) 表示,其中s 是复变量,X(s) 和Y(s) 分别是输入信号x(t) 和输出信号y(t) 的拉普拉斯变换。
接下来,我们来探讨如何求传递函数的导数。
根据求导法则,我们可以采用以下三种方法求传递函数的导数:1.利用链式法则求导:对于一般的传递函数G(s),我们可以利用链式法则求导。
具体步骤如下:G"(s) = d/ds (Y(s)/X(s))= Y"(s) * X(-s) - Y(s) * X"(-s)其中,Y"(s) 和X"(s) 分别表示输出信号y(t) 和输入信号x(t) 的导数的拉普拉斯变换。
2.利用隐函数求导法则求导:对于由参数方程描述的传递函数G(s),我们可以利用隐函数求导法则求导。
具体步骤如下:G"(s) = d/ds (Y(s)/X(s))= (dY(s)/ds * X(s) - Y(s) * dX(s)/ds) / X(s)^2其中,dY(s)/ds 和dX(s)/ds 分别表示输出信号y(t) 和输入信号x(t) 的导数的拉普拉斯变换。
3.利用参数方程求导法则求导:对于由参数方程描述的传递函数G(s),我们还可以利用参数方程求导法则求导。
第六章 传递函数对于线性定常系统,传递函数是常用的一种数学模型,它是在拉氏变换的基础上建立的。
用传递函数描述系统可以免去求解微分方程的麻烦,间接地分析系统结构及参数与系统性能的关系,并且可以根据传递函数在复平面上的形状直接判断系统的动态性能,找出改善系统品质的方法。
因此,传递函数是经典控制理论的基础,是一个极其重要的基本概念。
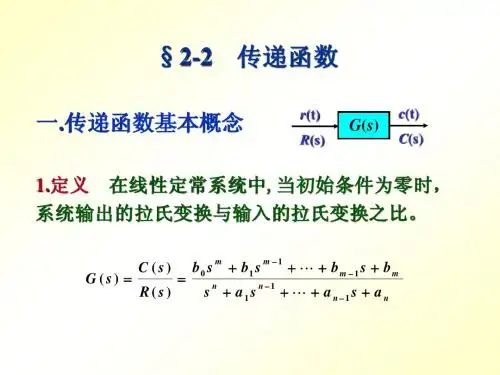
第一节 传递函数的定义一、传递函数的定义1、定义对于线性定常系统,在零初始条件下,系统输出量的拉氏变换与输入量的拉()()C s R s ==零初始条件输出信号的拉氏变换传递函数输入信号的拉氏变换2、推导设线性定常系统的微分方程的一般形式为1011110111()()()()()()()()n n n n nn m m m m mm d d d a c t a c t a c t a c t dtdtdtd d d b r t b r t b r t b r t dtdtdt------++⋅⋅⋅++=++⋅⋅⋅++◆ 式中c(t)是系统输出量,r(t)是系统输入量,r(t)、c(t)及其各阶导数在t=0时的值均为零,即零初始条件。
◆a , 1a ,…,na 及b , 1b ,…,mb 均为系统结构参数所决定的实常数。
对上式中各项分别求拉氏变换,并令C(s)=L[c(t)],R(s)=L[r(t)],可得s 的代数方程为:11011011[]()[]()nn mm n n m m a s a sa s a C sb sb sb s b R s ----++⋅⋅⋅++=++⋅⋅⋅++于是,由定义得到系统的传递函数为:10111011()()()()()m m m m nn n nb s b sb s b C s M s G s R s a s a sa s a N s ----++⋅⋅⋅++===++⋅⋅⋅++其中,1011()m m m m M s b s b s b s b --=++⋅⋅⋅++ 1011()n n n n N s a s a s a s a --=++⋅⋅⋅++ N(s)=0称为系统的特征方程,其根称为系统特征根。
自动控制原理传递函数自动控制原理中,传递函数是一个非常重要的概念。
传递函数可以描述控制系统的输入和输出之间的关系,通过传递函数,我们可以分析系统的动态特性,设计控制器,进行系统仿真和性能评估。
因此,了解和掌握传递函数的概念和应用是非常重要的。
首先,让我们来了解一下传递函数的定义。
传递函数是指控制系统的输出响应与输入信号之间的函数关系,通常用G(s)表示。
其中,s是复变量,表示系统的复频域变量。
传递函数可以是一个分式函数,也可以是一个多项式函数。
通过传递函数,我们可以方便地分析系统的频域特性和时域特性。
接下来,我们来看一下传递函数的应用。
在控制系统设计中,我们经常需要根据系统的要求设计控制器,使得系统的性能指标满足要求。
而传递函数可以帮助我们分析系统的稳定性、超调量、静态误差等性能指标,从而指导我们设计出合适的控制器。
此外,传递函数也可以用于系统的仿真和性能评估,通过对传递函数进行频域分析和时域分析,我们可以了解系统的动态特性,评估系统的性能,找出系统存在的问题并进行改进。
在实际工程中,我们经常会遇到各种各样的控制系统,比如电机控制系统、飞行器控制系统、机器人控制系统等。
而这些控制系统的动态特性往往是非常复杂的,需要通过传递函数进行分析和设计。
因此,掌握传递函数的应用是非常重要的。
最后,让我们来总结一下传递函数的重要性。
传递函数是描述控制系统输入和输出之间关系的重要工具,通过传递函数,我们可以分析系统的动态特性,设计控制器,进行系统仿真和性能评估。
在实际工程中,掌握传递函数的应用是非常重要的,可以帮助我们设计出性能优良的控制系统。
综上所述,传递函数在自动控制原理中具有非常重要的地位和作用。
通过对传递函数的理解和应用,我们可以更好地理解和设计控制系统,提高系统的性能和稳定性。
希望本文能够帮助读者更好地理解传递函数的概念和应用,提高对自动控制原理的理解和应用能力。
传递函数的性质传递函数是一种常用的数学概念,它广泛应用在电路理论、控制理论、系统的分析和设计中。
传递函数的性质对电路、控制、信号处理以及生物学等领域有着重要意义。
传递函数是指一个函数,它可以描述输入信号对输出信号的变化。
它也称为传递系数,可以清楚地表示输出信号动态的变化状态。
传递函数的主要作用是分析和描述系统的状态,可以用来研究系统的性能,在电子工程、计算机工程、生物学等领域都有重要意义。
传递函数是系统动态特性的重要参数,它可以描述系统的输入信号对输出信号的变化。
系统的传递函数通常是一个分母多项式,它可以清楚地表达系统的输出信号如何变化,也可以用它来研究系统的稳定性、敏感性、有效性和效果等性能特性。
传递函数的性质可分为幅频特性和空间特性两类。
幅频特性是指传递函数的输出信号随输入信号频率的变化,其空间特性描述了传递函数的输出信号随时间变化的特性。
通常来讲,传递函数具有以下性质:(1)益:传递函数的增益是指输出信号与输入信号的大小比值,它表示了传递函数的增益特性,增益数值越大表示系统的响应能力越强;(2)位:传递函数的相位是指输出信号相对与输入信号的相位差,它表示了传递函数的相位特性,相位角越大表示系统的响应时间越长;(3)抗:传递函数的阻抗是指系统相对于输入信号的阻抗,它表示了系统的阻抗特性,阻抗数值越小表示系统的阻抗能力越低;(4)对性:传递函数的相对性是指系统对输入信号的变化反应能力,它表示了系统的相对特性,相对性数值越大表示系统对输入信号的变化反应能力越强。
传递函数的性质是一个重要的系统特性,可以用来研究系统的动态特性,可以根据系统的动态特性来分析和控制系统的性能。
因此,传递函数的性质也是系统设计和分析的重要参数,是系统的技术分析的重要基础。
综上所述,传递函数的性质对于理解和分析系统的状态有重要意义,在电路、控制、信号处理以及生物学等领域中都有广泛的应用。
它们可以帮助我们更加清楚地描述系统的性能,并为系统的设计与分析提供良好的参考依据。
传递函数的定义,零点,极点,特征方程【引言】在探讨传递函数的定义、零点、极点和特征方程之前,我们首先要了解传递函数的基本概念。
传递函数是描述线性时不变系统输入与输出之间关系的一种数学函数。
它是控制工程中最为常用的理论工具之一,对于分析和设计控制系统具有重要意义。
通过对传递函数的分析,我们可以全面了解系统的动态特性,从而帮助我们实现恰当的控制和优化。
【传递函数的定义】传递函数是描述线性时不变系统输入与输出之间关系的函数。
在控制工程中,一般使用 Laplace 变换来表示传递函数。
传递函数可以用来描述系统对输入信号的响应情况,其数学表达式通常具有分子和分母的形式,形如 H(s)=Y(s)/X(s),其中 H(s) 为传递函数,Y(s) 为系统的输出信号的 Laplace 变换,X(s) 为系统的输入信号的 Laplace 变换。
通过传递函数,我们可以了解系统对各种输入信号的响应情况,从而为控制系统的设计和分析提供依据。
【零点和极点】传递函数的分子和分母多项式的根分别称为传递函数的零点和极点。
零点和极点决定了传递函数的动态特性,对于系统的稳定性和动态响应具有重要影响。
零点是使传递函数等于零的值,其位置可以直接影响系统的传递特性。
当传递函数的零点位于频域图中的某一点时,系统对该频率的输入信号会受到抑制;当零点位于实轴上时,系统会产生共振现象,从而导致系统的不稳定性。
极点是使传递函数的分母多项式等于零的值,其位置决定了系统的稳定性和动态响应。
当极点全部位于左半平面时,系统为稳定系统;当存在极点位于右半平面时,系统为不稳定系统;若存在虚轴上的极点,则会影响系统的频率响应特性。
【特征方程】特征方程可以由传递函数的分母多项式推导得出,是描述系统的稳定性及动态响应的重要方程之一。
特征方程的根即为传递函数的极点,通过解特征方程可以得到系统的固有频率和阻尼比,从而帮助我们全面了解系统的动态特性。
【个人观点】对于控制工程领域的从业者来说,深入理解传递函数的定义、零点、极点和特征方程对于系统分析和控制设计至关重要。
传递函数模型和传递函数
传递函数模型和传递函数是控制系统分析和设计中的核心概念。
传递函数是一种数学模型,它在使用拉氏变换方法求解线性常微分方程时引出。
具体来说,传递函数定义了线性定常系统在零初始条件下,系统输出量的拉氏变换与输入量的拉氏变换之比。
这种数学模型可以将系统在时域的微分方程描述变换为复数域的传递函数来描述,从而将时域的微分、积分运算简化为代数运算,大大方便了系统的分析与设计。
传递函数模型则表示的是初始状态为0时输出信号与输入信号之间的变换关系。
这意味着,无论一个系统的状态模型多么复杂,都可以通过一个统一的方法,得到一个对应的传递函数模型。
值得注意的是,实际中的系统或多或少都含有一定的非线性,因此线性系统的假设只能是在一定条件下成立。
但传递函数主要针对线性时不变(LTI)系统,它是一种在经典控制中基于传递函数这一数学模型进行分析和设计的方法。