水平轴风力发电机组空气动力学理论
- 格式:doc
- 大小:9.11 MB
- 文档页数:28
填空题整体认识1、750 风力发电机组采用(水平)轴、三叶片、(上)风向、定桨距(失速)调节、(异步)发电机并网的总体设计方案2、单级异步发电机与齿轮箱之间采用了(膜片式)联轴器连接,该联轴器既具有(扭矩传递)功能,又具有(扭矩过载)保护作用3、750 机组设置了齿轮润滑油(加热装置),外接(强迫油冷却)装置、发电机(加热)除湿装置、散热系统等。
4、机组的软并网装置可将电流限定在额定值的(1.5 )倍之;机组的无功补偿装置可保证功率因数在额定功率点达到(0.99 )以上。
5、整个机组由计算机控制,数据自动(采集处理)、自动运行并可远程监控。
6、750 机组安全系统独立于(控制系统),包括相互独立、(失效保护)的叶尖气动刹车和两组机械刹车。
7、750机组的切入风速(4.0 )m/s,额定风速(15)m/s, 切出风速10 分钟均值(25 )m/s 。
8、齿轮箱的弹性支撑承担着齿轮箱的全部重量。
由于弹性支撑是主轴的一个(浮动)支点,也承担着主轴的部分重量。
9、S48/750机组叶轮转速是(22.3 )rpm,叶片端线速度(56)m/s 。
10、齿轮箱的齿轮传动比率是(67.9),润滑形式(压力强制润滑)。
异步发电机1、原动机拖动异步电机, 使其转子转速n 高于旋转磁场的(同步转速),即使转差率s< 0, 就变成异步发电机运行。
2、风力发电机选用(H)级的绝缘材料。
3、异步发电机本身不能提供激磁电流,必须从电网吸取(无功励磁)功率以建立磁场4、三相异步发电机的基本结构与三相异步电动机(相同)。
5、异步发电机输向电网的电流频率和它自身的转差率(无关)。
6、发电机基本参数额定功率(750)kW额定电压(690)V额定电流(690)A额定转速(1520)rpm额定滑差(1.33 )%绝缘等级(H)8 750kW风力发电机为卧式、(强迫)通风、三相铜条(鼠笼异步)发电机。
9、发电机的自然(功率因数)要尽可能高,以减少对电网无功功率的吸收或降低补偿电容器的电容量。

风力机空气动力学基础知识风能曾是蒸汽机发明之前最重要的动力,数千年前就有了帆船用于交通运输,后来有了风车用来磨面与抽水等。
近年来,由于传统能源逐渐枯竭、对环境污染严重,风能作为清洁的新能源得到人们的重视。
为方便风力机技术知识的学习,下面介绍一些风力机空气动力学的基础知识。
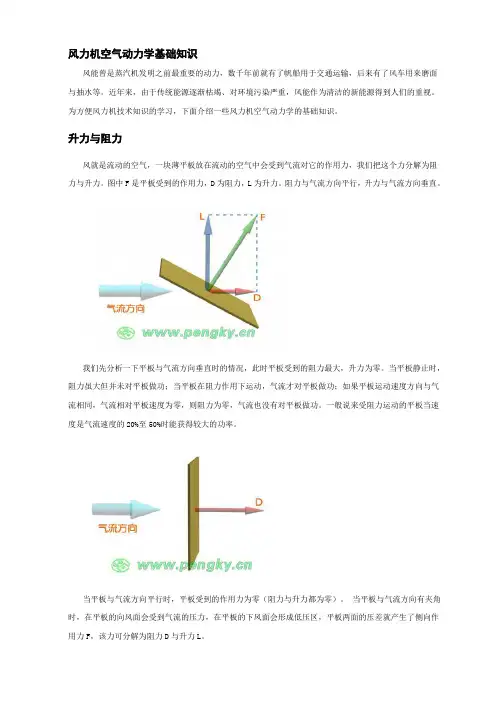
升力与阻力风就是流动的空气,一块薄平板放在流动的空气中会受到气流对它的作用力,我们把这个力分解为阻力与升力。
图中F是平板受到的作用力,D为阻力,L为升力。
阻力与气流方向平行,升力与气流方向垂直。
我们先分析一下平板与气流方向垂直时的情况,此时平板受到的阻力最大,升力为零。
当平板静止时,阻力虽大但并未对平板做功;当平板在阻力作用下运动,气流才对平板做功;如果平板运动速度方向与气流相同,气流相对平板速度为零,则阻力为零,气流也没有对平板做功。
一般说来受阻力运动的平板当速度是气流速度的20%至50%时能获得较大的功率。
当平板与气流方向平行时,平板受到的作用力为零(阻力与升力都为零)。
当平板与气流方向有夹角时,在平板的向风面会受到气流的压力,在平板的下风面会形成低压区,平板两面的压差就产生了侧向作用力F,该力可分解为阻力D与升力L。
当夹角较小时,平板受到的阻力D较小;此时平板受到的作用力主要是升力L。
截面为流线型的飞机翼片阻力很小,即使与气流方向平行也会有升力,因为翼片上表面弯曲,下表面平直,翼片上方气流速度比下方快,跟据流体力学的伯努利原理,上方气体压强比下方小,翼片就受到向上的升力作用。
当翼片与气流方向有夹角(该角称攻角或迎角)时,随攻角增加升力会增大,阻力也会增大,平衡这一利弊,一般说来攻角为8至15度较好。
超过15度后翼片上方气流会发生分离,产生涡流,升力会迅速下降,阻力会急剧上升,这一现象称为失速。
风力发电用风力机有阻力型与升力型两种,水平轴风力机基本都是升力型,垂直轴风力机有多种阻力型结构,也有是升力型结构。
翼型翼型本是来自航空动力学的名词,是机翼剖面的形状,风力机的叶片都是采用机翼或类似机翼的翼型,与翼型上表面和下表面距离相等的曲线称为中弧线。
风力发电机运行的空气动力学原理解析风力发电机是一种利用风能转化为电能的设备,利用空气动力学原理进行运行。
空气动力学是研究空气在物体表面流动时所产生的力学效应的学科,其中涉及到的流体力学、空气动力学和结构力学等知识领域。
本文将从风力发电机的构成和原理、空气动力学原理以及风力发电机的运行过程等方面对其运行原理进行分析和解析。
首先,风力发电机由风轮、主轴、发电机以及塔架等构成。
其中,风轮是最重要的部件,它是通过空气动力学原理将风能转换为机械能。
风轮主要由叶片、主轴承和转子组成,其中叶片是最关键的部分。
在运行过程中,当风流通过风轮的叶片时,由于叶片的形状和倾斜角度,会使得风流产生一定的压力差,从而使风轮转动。
风轮的转动通过主轴传递给发电机,由发电机将机械能转化为电能。
其次,风力发电机的运行离不开空气动力学原理的支持。
当风流通过风轮的叶片时,由于风流的高速流动和叶片的形状等因素,会在叶片上产生压力差。
根据伯努利定律,当流体速度增加时,压力就会下降,而风轮叶片的形状和倾斜角度使得上表面的流速较快,下表面的流速较慢,从而产生了压力差。
此时,风流将从高压区域流向低压区域,推动风轮转动。
这就是风力发电机利用空气动力学原理来转换风能的过程。
风力发电机使用的是无驱动翼型,即在风流作用下产生升力来推动转子转动。
翼型的选择非常关键,不同的翼型会有不同的气动性能,影响着风力发电机的效率和输出功率。
一般而言,翼型的厚度比例愈小,气动性能愈好,当然翼型的选择还要结合具体的风力工况。
在实际应用中,常用的翼型有NACA系列翼型、稳定翼型等。
最后,风力发电机的运行过程可以简单概括为:当风力达到一定速度时,风轮开始转动,这时发电机开始工作,将机械能转化为电能。
随着风力的增大,风轮的转速也会增加,进而提高了发电机的输出功率。
另外,为了保证风力发电机的安全运行,还需要考虑风轮的稳定性和抗风性能。
在强风条件下,风力发电机会自动启动风刹系统,将风轮停止旋转,以避免因风力过大导致设备损坏。
偏航气动理论及偏航结构风力发电机偏航状态的空气动力学基础由于风向的不断变化,风轮不能时刻保持其轴向与风向平行,这种状态称之为偏航状态。
偏航状态的风力发电机运行效率低于非偏航状态。
为了提高风力发电机的发电效率,水平轴风力发电机都配有偏航装置,用以改变风轮的方向,时刻保持风轮轴向与风向平行,使风力发电机达到最佳的工作状态。
传统的叶素-动量理论只考虑了风向与风轮平行使的情况,并不适用于偏航状态,因此需要对其修正以达到准确效果。
偏航时的动量定理动量定理通常用来研究风速与风作用在叶片上的力之间的关系,用以表现风轮对风能的转换效率问题,为了便于该问题的研究,现做出以下假设1 风轮为一平面圆盘,不考虑倾斜角。
2 空气无摩擦、无粘性3流过风轮的气流均匀4空气不可压缩,即空气密度不变。
将动量定理直接应用于处于偏航状态的风轮时是存在一定问题的。
对于未处于偏航状态的风力发电机风轮来说,实际上叶片在空间的诱导速度是不同的,在径向方向上是有一定变化的,而动量定理只能计算出平均的诱导速度。
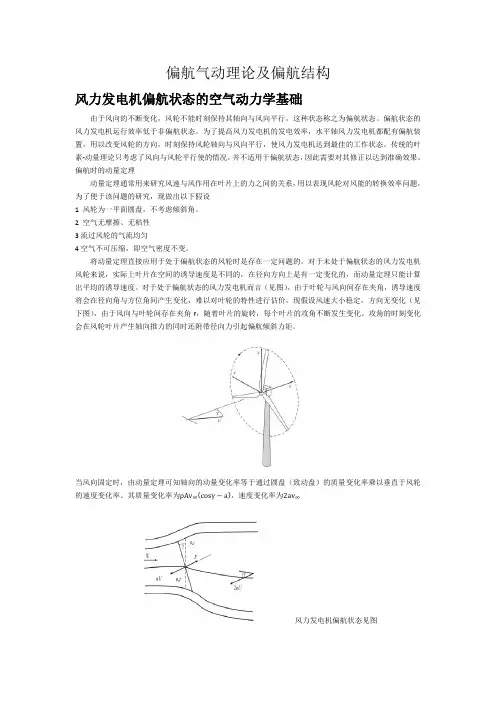
对于处于偏航状态的风力发电机而言(见图),由于叶轮与风向间存在夹角,诱导速度将会在径向角与方位角间产生变化,难以对叶轮的特性进行估价。
现假设风速大小稳定,方向无变化(见下图),由于风向与叶轮间存在夹角r,随着叶片的旋转,每个叶片的攻角不断发生变化。
攻角的时刻变化会在风轮叶片产生轴向推力的同时还附带径向力引起偏航倾斜力矩。
当风向固定时,由动量定理可知轴向的动量变化率等于通过圆盘(致动盘)的质量变化率乘以垂直于风轮的速度变化率。
其质量变化率为ρAv∞cosγ−a,速度变化率为2av∞风力发电机偏航状态见图风中带有的动能为E=12mv2=12ρAv3由上式可知风流过叶轮时带来的机械能为E=1ρAv3=1ρAv∞3叶片作用在圆盘上的力为F=P a−P b A=2ρAv∞cosα−a av∞FRF式中,P a和P b分别为风轮迎风面与背风面的压力;A为风轮的扫略面积;v∞为风在无穷远处的速度;ρ为空气的密度;a为轴向诱导速度;α为轴向平均诱导因数。

第三章 水平轴风力发电机组空气动力学理论 研究风能工程中的空气动力问题的方法有理论计算,风洞实验和风场测试,它们相互补充,相互促进。
由于绕风力机的流动十分复杂,目前,理论计算还有一定的局限性,因此,还需要通过风洞实验和风场测试的方法来加以补充和完善。
本章主要围绕水平轴风力发电机组空气动力学理论进行阐述,内容包括动量理论,叶素理论,叶素-动量理论等基本理论,风轮的气动特性,叶片设计,叶尖损失,翼型升力和阻力等内容;研究风力发电机的气东理论需要具备一定的流体动力学的知识,诸如不可压缩气流静态贝努利(Bernoulli )方程和连续性概念。
Biot-Savart 法则,类似于电磁场来确定涡流速度,Kutta-Joukowski 确定边界涡流等。
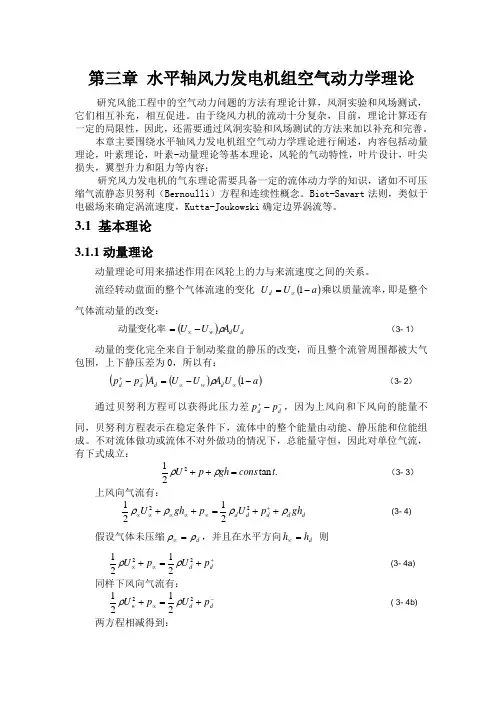
3.1 基本理论3.1.1动量理论动量理论可用来描述作用在风轮上的力与来流速度之间的关系。
流经转动盘面的整个气体流速的变化 ()a U U d -=∝1乘以质量流率,即是整个气体流动量的改变:()d d w U A U U ρ-=∝动量变化率 (3- 1) 动量的变化完全来自于制动桨盘的静压的改变,而且整个流管周围都被大气包围,上下静压差为0,所以有:()()()a U A U U A p p d w d d d --=-∝∝-+1ρ (3- 2)通过贝努利方程可以获得此压力差-+-d d p p ,因为上风向和下风向的能量不同,贝努利方程表示在稳定条件下,流体中的整个能量由动能、静压能和位能组成。
不对流体做功或流体不对外做功的情况下,总能量守恒,因此对单位气流,有下式成立:.tan 212t cons gh p U =++ρρ (3- 3) 上风向气流有:d d d d d gh p U p gh U ρρρρ++=+++∝∝∝∝∝222121 (3- 4) 假设气体未压缩d ρρ=∝,并且在水平方向d h h =∝ 则+∝∝+=+d d p U p U 222121ρρ (3- 4a) 同样下风向气流有:-∝+=+d d w p U p U 222121ρρ ( 3- 4b)两方程相减得到:()()2221w d d U U p p -=-∝-+ρ (3- 5) 代入方程(3-2)得()()()a U A U U A U U d w d w --=-∝∝∝12122ρρ (3- 6)这样可导出: ()∝-=U a U w 21 (3- 7)可以看出,一半的轴向气流损失发生在流经制动桨盘时,另一半在下风向。
风力发电机空气动力学摘要:本文从风力发电机空气动力学研究意义出发,通过翼型、叶轮、风场和尾流的讲解详细阐述了风力发电机空气动力学产生的原理及研究方法,对今后系统性的研究风力发电机空气动力学研究有着重要的指导意义。
关键词:风力发电机;空气动力学;研究方法引言随着工业化的发展导致环境污染问题日益严重,保护环境是人类长期稳定发展的根本利益和基本目标之一,实现可持续发展依然是人类面临的严峻挑战。
我国也意识到环保事业的重要性,逐步开发风力发电、光伏发电等可再生资源。
其风力发电机主要的动力为风载,目前国内外风力发电量主要受到风载的影响,然风载原理即为空气动力学,因此对风力发电机空气动力学的研究极为重要。
一、风力发电机翼型1.1翼型空气动力产生原因伯努利方程:定常、忽略粘性损失的流动中,动能、压力势能、位势能之和不变;p+1/2ρv^2+ρgh=C流速高处压力低,流速低处压力高。
特点:a)最大升力系数对前缘粗糙度不敏感;b)表面清洁时,NREL翼型有着较小的表面摩擦阻力;c)失速平缓,升力系数不会出现较大的波动;DU系列二、风场和尾流2.1叶片截面翼型分布三、风场和尾流3.1风力机尾流气动特点a)尾流区域划分为近尾迹区(<3D)和远尾迹区(>3D);b)尾流中速度亏损,湍流度增加;c)尾流区域内、外流体掺混,随着距离增加,又逐渐恢复到自由入流水平(>10D);d )尾流流动特征与风资源(切变、湍流)、大气稳定性、叶轮气动特性、地形等密切相关。
四、结束语在风力发电机风载利用过程中对空气动力学的了解有着重要的意义,通过以上的叙述可以使我们对风力发电机空气动力学研究及分析有着重要的理论支持,对今后风电行业的发展有着重要的指导作用。
参考文献:[1] 贺德馨. 风工程与工业空气动力学[2] Hansen M. Aerodynamics of wind turbines风力机空气动力学肖劲松译[3] Burton T. Wind energy handbook风能技术武鑫等译。
偏航气动理论及偏航结构风力发电机偏航状态的空气动力学基础由于风向的不断变化,风轮不能时刻保持其轴向与风向平行,这种状态称之为偏航状态。
偏航状态的风力发电机运行效率低于非偏航状态。
为了提高风力发电机的发电效率,水平轴风力发电机都配有偏航装置,用以改变风轮的方向,时刻保持风轮轴向与风向平行,使风力发电机达到最佳的工作状态。
传统的叶素-动量理论只考虑了风向与风轮平行使的情况,并不适用于偏航状态,因此需要对其修正以达到准确效果。
偏航时的动量定理动量定理通常用来研究风速与风作用在叶片上的力之间的关系,用以表现风轮对风能的转换效率问题,为了便于该问题的研究,现做出以下假设1 风轮为一平面圆盘,不考虑倾斜角。
2 空气无摩擦、无粘性3流过风轮的气流均匀4空气不可压缩,即空气密度不变。
将动量定理直接应用于处于偏航状态的风轮时是存在一定问题的。
对于未处于偏航状态的风力发电机风轮来说,实际上叶片在空间的诱导速度是不同的,在径向方向上是有一定变化的,而动量定理只能计算出平均的诱导速度。
对于处于偏航状态的风力发电机而言(见图),由于叶轮与风向间存在夹角,诱导速度将会在径向角与方位角间产生变化,难以对叶轮的特性进行估价。
现假设风速大小稳定,方向无变化(见下图),由于风向与叶轮间存在夹角r,随着叶片的旋转,每个叶片的攻角不断发生变化。
攻角的时刻变化会在风轮叶片产生轴向推力的同时还附带径向力引起偏航倾斜力矩。
当风向固定时,由动量定理可知轴向的动量变化率等于通过圆盘(致动盘)的质量变化率乘以垂直于风轮的速度变化率。
其质量变化率为ρAv∞(cosγ−a),速度变化率为2av∞风力发电机偏航状态见图风中带有的动能为E=12mm2=12mmm3由上式可知风流过叶轮时带来的机械能为E=12mmm3=12mmm∞3叶片作用在圆盘上的力为m=(m m−m m)m= 2mmm∞(mmmm−m)mm∞FRF式中,P a 与P b 分别为风轮迎风面与背风面的压力;A为风轮的扫略面积;v ∞为风在无穷远处的速度;ρ为空气的密度;a为轴向诱导速度;α为轴向平均诱导因数。
风力发电的空气动力学原理风机叶片在空气中的受力特性与飞机的机翼在空气中的受力相类似,所以对风机叶片的空气动力学研究很多是借鉴了对飞机的翼型的空气动力学的研究技术以及飞机翼型的制造技术。
飞机在空气中运动所引起的作用于飞机上的空气动力取决于空气的物理属性,飞机的几何形状、飞行姿态以及飞机与空气之间的相对速度,因此在讨论空气动力的产生及其变化规律之前,首先来研究空气的基本属性。
空气动力学是关于气流特性的学说,相对于固体而言气体的特性。
空气动力学定律,尤其是旋涡、推力、正面阻力和升力使得飞机可以飞行。
相同的定律对于滑翔也很重要。
空气动力学是一门复杂的科学。
并非在每种具体情况下都可以通过假设计算对特定现象作数字上或理论上的精确说明,因而要利用风洞试验结果。
所以空气动力学也是一门以经验为依据的科学。
气体和液体统称为流体。
气体和液体同固体相比较,分子间引力较小,分子运动较强烈,分子没有一定的排列规律,这就决定了气体和液体具有共同的特性,不能保持一定形状,而具有流动性。
从力学性质来看,固体具有抵抗压力、拉力和切力的能力。
因而在外力作用下,通常发生较小的变形,而且到了一定程度后变形就停止。
流体由于不能保持一定形状,所以它不能抵抗切力。
当他受到切力作用时,就要发生连续不断变形(即流动)。
这就是流体同固体在力学性质上的显著区别。
气体和液体除了具有上述的共同特性外,还有如下的不同特性:液体的分子跟分子的有效直径差不多是相等的,当对液体加压时,由于分子距离稍有缩小,出现强大的分子斥力来抵抗外压力,这就是说:液体的分子距离很难缩小,可以认为液体具有一定体积,因此通常成液体为不可压缩流体。
一般来说,气体分子间距离很大,例如常温常压下空气的分子距离为3×10-7,其分子有效直径的数量级为10-8厘米。
可见分子距离比分子有效直径大得很多。
这样,当分子距离缩小很多时,才会出现分子斥力。
因此,通常称气体为可压缩流体。
又因为分子距离很大,分子引力很小,而分子热运动起决定性作用,这就决定了气体既没有一定形状也没有一定体积。
第三章 水平轴风力发电机组空气动力学理论 研究风能工程中的空气动力问题的方法有理论计算,风洞实验和风场测试,它们相互补充,相互促进。
由于绕风力机的流动十分复杂,目前,理论计算还有一定的局限性,因此,还需要通过风洞实验和风场测试的方法来加以补充和完善。
本章主要围绕水平轴风力发电机组空气动力学理论进行阐述,内容包括动量理论,叶素理论,叶素-动量理论等基本理论,风轮的气动特性,叶片设计,叶尖损失,翼型升力和阻力等内容;研究风力发电机的气东理论需要具备一定的流体动力学的知识,诸如不可压缩气流静态贝努利(Bernoulli )方程和连续性概念。
Biot-Savart 法则,类似于电磁场来确定涡流速度,Kutta-Joukowski 确定边界涡流等。
3.1 基本理论3.1.1动量理论动量理论可用来描述作用在风轮上的力与来流速度之间的关系。
流经转动盘面的整个气体流速的变化 ()a U U d -=∝1乘以质量流率,即是整个气体流动量的改变:()d d w U A U U ρ-=∝动量变化率 (3- 1) 动量的变化完全来自于制动桨盘的静压的改变,而且整个流管周围都被大气包围,上下静压差为0,所以有:()()()a U A U U A p p d w d d d --=-∝∝-+1ρ (3- 2)通过贝努利方程可以获得此压力差-+-d d p p ,因为上风向和下风向的能量不同,贝努利方程表示在稳定条件下,流体中的整个能量由动能、静压能和位能组成。
不对流体做功或流体不对外做功的情况下,总能量守恒,因此对单位气流,有下式成立:.tan 212t cons gh p U =++ρρ (3- 3) 上风向气流有:d d d d d gh p U p gh U ρρρρ++=+++∝∝∝∝∝222121 (3- 4) 假设气体未压缩d ρρ=∝,并且在水平方向d h h =∝ 则+∝∝+=+d d p U p U 222121ρρ (3- 4a) 同样下风向气流有:-∝+=+d d w p U p U 222121ρρ ( 3- 4b)两方程相减得到:()()2221w d d U U p p -=-∝-+ρ (3- 5) 代入方程(3-2)得()()()a U A U U A U U d w d w --=-∝∝∝12122ρρ (3- 6)这样可导出: ()∝-=U a U w 21 (3- 7)可以看出,一半的轴向气流损失发生在流经制动桨盘时,另一半在下风向。
图 3.1能量吸收制动桨盘和气流管状图3.1.2 叶素理论叶素理论的基本出发点是将风轮叶片沿展向分成许多微段,称这些微段为叶素,如前面所述,多个圆环,半径r ,径向宽r δ。
在每个叶素上作用的气流相互之间没有干扰,作用在叶片上的力可分解为升力和阻力二维模型,作用在每个叶素单元的合成流速与叶片平面的夹角为攻角。
翼型特征系数L c 和D c 随攻角的改变而改变。
一个风轮,叶片数目N ,叶尖半径R ,每个叶片弦长c ,桨距角β(零升力线与转动平面夹角)。
弦长和桨距角沿叶片展向变化,叶片以角速度Ω旋转,来流速度∝U ,给定半径r 处,切向线速度r Ω,切线尾流速度r a Ω',净切线速度为r a Ω+)'1(,如图 3.2和图 3.3所示。
图 3.2 圆环形叶素单元图 3.3作用在叶素上的力和气流流速从图 3.3可以看出,作用在叶素上的合成流速为:22222)'1()1(a r a U W +Ω+-=∝ (3- 8)其中φ是合成流速与旋转平面的夹角,可以称之为入流角。
W a U )1(sin -=∝φ Wa r )'1(cos +Ω=φ (3- 9) 攻角α可表示为:βφα-= (3- 10)作用在单位圆环径向宽r δ上的升力分量,与合成流速W 方向垂直,表达式为:r cC W L L δρδ221= (3- 11)阻力分量与合成流速W 方向平行,表达式为:r cC W D d δρδ221= (3- 12)3.1.3 叶素-动量理论(BEM )采用叶素-动量理论可以计算风轮旋转面中的轴向诱导因子a 和切向诱导因子'a 。
叶素-动量理论基本假设为各个叶素单元作用相互独立,各个圆环之间没有径向干扰,轴向诱导因子a 并不沿着径向方向改变。
作用在N 个叶片风轮上的气动力在轴向方向合成为:r C C Nc W D L d l δφφρφδφδ)sin cos (21sin cos 2+=+ (3- 13) 单位扫掠圆环面积的轴向动量变化为:r r a a U aU r r a U δπρδπρ)1(422)1(2-=-∝∝∝ ( 3- 14) 尾流旋转的动能来自于静压改变引起的切变动能2)'2(21r a Ωρ,所以需要额外加在轴向圆环上的力为r r r a δπρ2)'2(212Ω,我们可得到如下等式: r r r a a a U r C C Nc W d l δπρδφφρ])'()1([4)sin cos (21222Ω+-=+∝ (3- 15) 简化之:μλμπφφ])'()1([8)sin cos (222a a a C C Rc N U Wd l +-=+∝ (3- 16) 作用在叶素上的气动力引起的叶轮轴向转矩为:r r C C Nc W r D L d l δφφρφδφδ)cos sin (21)cos sin (2-=- (3- 17)作用在单位圆环面积上的角动量变化为: r r a a r U r r r a r a U δπρδπρ2)1(')(42'2)1(-Ω=Ω-∝∝ (3- 18)轴向转矩与角动量变化相等,得到:r r a a r U r r C C Nc W d l δπρδφφρ22)1(')(4)cos sin (21-Ω=-∝ (3- 19) 简化之:)1('8)cos sin (222a a C C Rc N U Wd l -=-∝πλμφφ (3- 19a )其中:系数R r /=μ令y d l C C C =-φφcos sinx d l C C C =+φφsin cos解方程(3-16)和(3-19a ),通过迭代计算,设置轴向诱导因子a 和切向诱导因子'a 初值为0,反复迭代,直至收敛,便可解出两个诱导因子。
迭代方程如下:()⎥⎦⎤⎢⎣⎡-=-222sin 4sin 41y r x r C C a a φσφσ(3- 20) φφσcos sin 4'1y r C a a =+ (3- 21)叶片实度σ定义为整个叶片面积占叶轮面积的比率,叶片弦长实度r σ定义为给定半径处叶片弦长占此半径处叶轮圆周的比率,表达式如下:Rc N r c N r πμπσ22== (3- 22) 值得注意的是,叶素-动量理论只适用于旋转叶轮中各叶片长度一致的情况,这样轴向诱导因子保持不变,否则叶片长度不一致,各叶片在径向相互干扰,动量理论成立的条件不具备,不能应用。
同时,叶尖速比最好大于3,这样误差才会小。
3.1.4柱涡理论假设叶轮叶片数目足够多,整个叶轮近似于一个实体平面,忽略尾流扩展,简化后的螺旋湍流尾流如图3.4所示,称为柱涡。
下风向线湍流强度∆Γ,沿旋转轴分布,整个强度为Γ。
图 3.4简化的螺旋湍流尾流管状图湍流旋转的螺旋角φ,就是前面定义的入流角,涡流强度dnd g Γ=,n 代表管形表面与∆Γ垂直的方向,涡流强度在平行于转动盘面方向的分量t g g φθcos =,由于轴向诱导速度在整个转盘内不变,有:∝-=-=aU g u d 2θ (3- 23)尾流远区: ∝-=-=aU g u d 2θ (3- 24)如图 3.5涡流几何关系图,一圈内,整个线积分的和为Γ,可得:)sin(2t R g φπΓ= (3- 25) ()()a U a R R g t t t -+ΩΓ=Γ=∝1'12sin cos 2πφφπθ (3- 26) ()()a U a R R aU t -+ΩΓ=∝∝1'122π ( 3- 27) ()()t a a a U '1142+Ω-=Γ∝π (3- 28)图 3.5涡流几何关系图叶根处湍流主要引入尾流切向速度,所有的叶根处湍流形状相同,整个强度和Γ,引入的切向流速:ΩΓ=Γ=Ω24'4'r a r ra ππ (3- 29) 由动量理论,施加在圆环(内半径r ,外半径r + r δ)上的角动量变化率等于它的转矩变化增量:()2'221r a rdr a U dM Ω-=∝πρ ( 3- 30)已知每单位圆环上的升力为:()Γ⨯=W L ρ (3- 31)Γ⨯W 为矢量乘积,()a rU r W M drd t -Γ=Γ⨯=∝1sin ρφρ ( 3- 32) 两个方程相等得到:()()()()t t t a a a a R a a U a r a '11'11'4'22222+-=+Ω-=ΩΓ=∝λπ ( 3- 33) ()()21'1'λa a a a t t -=+ ( 3- 34)作用在单位圆环面积上的转矩增量:()()t t a a a rU r W M dr d '114sin 23+Ω-=Γ=∝πρφρ ( 3- 35) 功率为:()()t a a a r U M drd P dr d '11422123+-=Ω=∝πρ ( 3- 36) ()()t a a a R U P '11421223+-=∝πρ ( 3- 37) 风能利用系数:()()()221'4'114a a a a a C t t P -=+-= ( 3- 38) 可以看出与动量理论得出结果类似。
3.2 风轮的气动特性本节主要讲述风轮的气动特性。
主要分为考虑风轮尾流旋转和不考虑风轮尾流旋转。
对于高叶尖速比的现代风机设计中,计算风机气动效率时,可以不考虑尾流效率。
因为当半径减小,切向流速增加,压力下降,可以认为径向压力梯度与旋转流场离心力平衡,半径越大,转动盘处离心力越大,静压力也就越大,这种引起尾流旋转的压降对轴向动量损失没有影响。
但对于风力提水机这样的设备,高起动转矩,高实度,低尖速比,这种忽略导致的错误会很大,必须考虑尾流效应。
3.2.1风轮几何参数风轮由叶片和轮毂组成,具有以下几何参数:风轮叶片数:组成风轮的叶片个数。
风轮直径:风轮旋转时的风轮外圆直径。
风轮面积:风轮扫掠面积。
风轮锥角:叶片与旋转轴垂直的平面的夹角。