实验4激光干涉仪测量位移实验-
- 格式:ppt
- 大小:1.52 MB
- 文档页数:13

迈克尔逊干涉仪实验报告
实验目的,通过搭建迈克尔逊干涉仪,观察干涉现象并测量光
的波长。
实验仪器,迈克尔逊干涉仪、激光器、反射镜、半反射镜、测
距仪等。
实验原理,迈克尔逊干涉仪利用干涉现象来测量光的波长,通
过将激光器发出的光分成两束,经过反射镜和半反射镜后再次交汇,形成干涉条纹,通过测量条纹的间距来计算光的波长。
实验步骤:
1. 搭建迈克尔逊干涉仪,调整反射镜和半反射镜的位置使得光
路稳定。
2. 打开激光器,调整干涉仪使得干涉条纹清晰可见。
3. 使用测距仪测量干涉条纹的间距。
4. 重复实验多次,取平均值得到最终结果。
实验结果,通过实验测得干涉条纹的间距为2.5mm,计算得到光的波长为650nm。
实验分析,实验结果与理论值相符,说明实验过程准确无误。
通过本次实验,我们成功地观察到了干涉现象,并且测量得到了光的波长,实验取得了成功。
实验总结,通过本次实验,我们深入了解了迈克尔逊干涉仪的工作原理,掌握了干涉现象的观察方法,并且学会了使用干涉仪测量光的波长。
这次实验对我们的学习和科研工作具有重要意义。
存在问题,在实验过程中,我们发现干涉条纹的清晰度受到环境光的影响,需要在实验环境中尽量减少杂光的干扰。
下次实验需要在更为稳定的实验环境中进行。
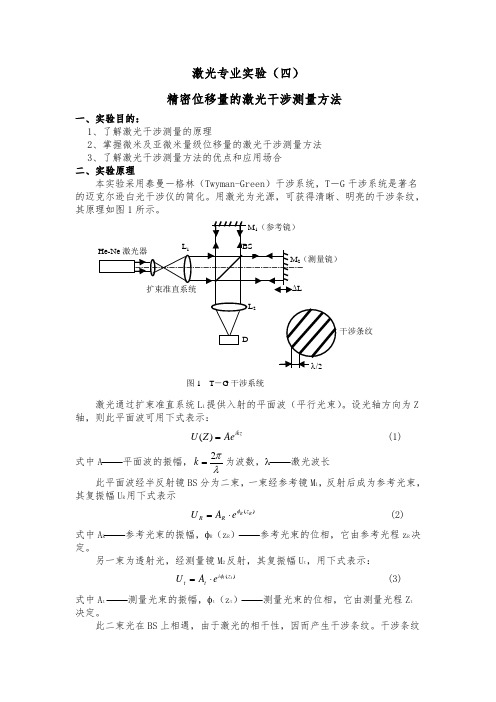
激光专业实验(四) 精密位移量的激光干涉测量方法一、实验目的:1、了解激光干涉测量的原理2、掌握微米及亚微米量级位移量的激光干涉测量方法3、了解激光干涉测量方法的优点和应用场合 二、实验原理本实验采用泰曼-格林(Twyman-Green )干涉系统,T -G 干涉系统是著名的迈克尔逊白光干涉仪的简化。
用激光为光源,可获得清晰、明亮的干涉条纹,其原理如图1所示。
图1 T -G 干涉系统激光通过扩束准直系统L 1提供入射的平面波(平行光束)。
设光轴方向为Z 轴,则此平面波可用下式表示: i k z Ae Z U =)( (1)式中A −−平面波的振幅,λπ2=k 为波数,λ−−激光波长此平面波经半反射镜BS 分为二束,一束经参考镜M 1,反射后成为参考光束,其复振幅U R 用下式表示)(R R z R R e A U φ⋅=(2)式中A R −−参考光束的振幅,φR (z R )−−参考光束的位相,它由参考光程z R 决定。
另一束为透射光,经测量镜M 2反射,其复振幅U t ,用下式表示: )(t t z i t t e A U φ⋅=(3)式中A t −−测量光束的振幅,φt (z t )−−测量光束的位相,它由测量光程Z t 决定。
此二束光在BS 上相遇,由于激光的相干性,因而产生干涉条纹。
干涉条纹的光强I(x,y)由下式决定*⋅=U U y x I ),( (4)式中***+=+=t Rt R U U U U U U ,,而U*,U R *,U t *为U ,U R ,U t 的共轭波。
当反射镜M 1与M 2彼此间有一交角2θ,并将式(2),式(3)代入式(4),且当θ较小,即sin θ≅θ时,经简化可求得干涉条纹的光强为:)2c o s1(2),(0θkl I y x I += (5) 式中I 0−−激光光强,l −−光程差,t R z z l -=。
式(5)说明干涉条纹由光程差l 及θ来调制。

实验五、精密位移量的激光干涉测量方法及实验一、实验目的:1.了解激光干涉测量的原理2.掌握微米及亚微米量级位移量的激光干涉测量方法 3.了解激光干涉测量方法的优点和应用场合 二、实验原理本实验采用泰曼-格林(Twyman-Green )干涉系统,T -G 干涉系统是著名的迈克尔逊白光干涉仪的简化。
用激光为光源,可获得清晰、明亮的干涉条纹,其原理如图1所示。
图1 T -G 干涉系统激光通过扩束准直系统L 1提供入射的平面波(平行光束)。
设光轴方向为Z轴,则此平面波可用下式表示:ikz Ae Z U =)((1)式中A −−平面波的振幅,λπ2=k 为波数,λ−−激光波长此平面波经半反射镜BS 分为二束,一束经参考镜M 1,反射后成为参考光束,其复振幅U R 用下式表示)(R R z R R e A U φ⋅=(2)式中A R −−参考光束的振幅,φR (z R )−−参考光束的位相,它由参考光程z R 决定。
另一束为透射光,经测量镜M 2反射,其复振幅U t ,用下式表示:)(t t z i t t e A U φ⋅=(3)式中A t −−测量光束的振幅,φt (z t )−−测量光束的位相,它由测量光程Z t 决定。
此二束光在BS 上相遇,由于激光的相干性,因而产生干涉条纹。
干涉条纹的光强I(x,y)由下式决定*⋅=U U y x I ),((4)式中***+=+=t R t R U U U U U U ,,而U*,U R *,U t *为U ,U R ,U t 的共轭波。
当反射镜M 1与M 2彼此间有一交角2θ,并将式(2),式(3)代入式(4),且当θ较小,即sin θ≅θ时,经简化可求得干涉条纹的光强为:)2cos 1(2),(0θkl I y x I +=(5)式中I 0−−激光光强,l −−光程差,t R z z l -=。
式(5)说明干涉条纹由光程差l 及θ来调制。
当θ为一常数时,干涉条纹的光强如图22λ⋅=N l (6) 式中N −−干涉条纹数因此,记录干涉条纹移动数,已知激光波长,由式(6)即可测量反射镜的位移量,或反射镜的轴向变动量∆L 。


基于激光干涉仪的CA6140机床精度测量实验学院:姓名:学号:成绩:一、实验目的与要求1.了解雷尼绍XL-80激光干涉仪的工作原理;2.掌握雷尼绍XL-80激光干涉仪的的使用方法;3.掌握普通机床Z轴定位精度、重复定位精度的测量方法;4.掌握普通机床定位误差数据的处理方法。
二、实验仪器与设备1.雷尼绍XL-80激光干涉仪一台;2.CA6140机床一台。
三、实验原理图1 线性定位精度测量原理图来自XL-80激光头的光束进入线性干涉镜,在此光束被分成两束。
一束光(称为参考光束)被引向装在分光镜上的反射镜,另一束光(测量光束)则穿过分光镜到达第二个反射镜。
然后,两束光都被反射回分光镜,在此它们重新组合并被导回到激光头,激光头内的探测器监测两束光之间的干涉。
一般在线性测量过程中,一个光学组件保持静止不动,另一个光学组件沿线性轴移动。
通过监测测量光束和参考光束之间的光路差异的变化,产生定位精度测量值(注意,它是两个光学组件之间的差异测量值,与XL激光头的位置无关)。
此测量值可以与理想位置比较,获得机床的精度误差。
四、实验步骤图2 定位精度测量示意图1.光路搭建(1)开动机床,在保证激光不被机床碰到的情况下,激光干涉仪应离机床越近越好(便于对光)。
(2)放好支架,大体判断镜子所需架设的高度,然后调整支架至合格位置。
各个活动部件都要锁死。
(3)将激光干涉仪安装至支架,激光干涉仪下有锁扣,扣死。
使用水平仪,通过调整支架使激光干涉仪达到水平状态。
(4)将激光干涉仪各个微调螺母调制中间位置(便于以后微调)。
(5)连接激光干涉仪电源、数据线、数据收集器、传感器、电脑等,打开激光干涉仪电源使激光干涉仪预热,等激光指示灯出现绿色后,表明激光已稳定(正常需5分钟)。
(6)架镜子:遵循干涉镜不动,反射镜随机床动a.将机床擦拭干净并将机床开到合适位置,被测量轴工作台需要开到极限位置(最靠近激光仪的一侧)。
b.先架干涉镜,将干涉镜用安装杆、磁性表座固定在机床不可运动部件或其它固定部件上。

实验一精密位移量的激光干涉测量方法一、实验目的:1.了解激光干涉测量的原理2.掌握微米及亚微米量级位移量的激光干涉测量方法3.了解激光干涉测量方法的优点和应用场合二、实验原理:本实验采用泰曼-格林(Twyman-Green)干涉系统,T-G干涉系统是著名的迈克尔逊白光干涉仪的一种变型,在光学仪器的制造工业中,常用其产生的等间距干涉条纹对光学零件或光学系统作综合质量检验。
泰曼-格林干涉仪与原始的迈克尔逊干涉仪不同点是,光源是单色激光光源,它置于一个校正像差的透镜L1的前焦点上,光束经透镜L1准直后,被分束器A分成两束光,到达反射镜M1和M2并被反射,两束反射光再次经A透射和反射,用另一个透镜校正像差的透镜L2会聚,人眼则处在透镜L2的焦点位置观察,能够观察到反射镜M1和M2的整个范围,从而可获得清晰、明亮的等间距干涉直条纹,其原理如图1所示。
图1 泰曼-格林干涉仪原理图若作出反射镜M1在半反射面A中的虚像M1'(图中未画出),干涉仪的出射光线相当于M2和M1’所构成的空气楔的反射光,因而泰曼干涉仪实际上就等效于平面干涉仪,只是这里两束光的光路被完全分开,进而产生了等厚干涉条纹。
当光源是点光源时,条纹是非定域的,在两个相干光束重叠区域内的任何平面上,条纹的清晰度都一样。
不过,实际上为了获得足够强度的干涉条纹,光源的扩展不能忽略,这时条纹定域在M1和M2构成的空气楔附近。
下面解释干涉条纹的产生,如图1所示,设入射平面波经M 1反射后的波前是W 1,经M 2反射后相应的波前是W 2,W 1和W 2位相相同。
引入虚波前W 1’ ,它是在W 1半反射面A 中的虚像,图中画出了虚相交于波前W 2上P 点的两支光路,这两支光在P 点的光程差为PN h ∆==即等于W 1’到P 点的法线距离,因为W 1’和W 2之间介质(空气)折射率为1,显然当0,1,2,...h m m λ==±±时,P 点为亮点,而当 1()0,1,2,...2h m m λ=+=±±时,P 点为暗点。
精密位移量的激光干涉测量方法及实验一、实验目的:1. 了解激光干涉测量的原理2. 掌握微米及亚微米量级位移量的激光干涉测量方法 3. 了解激光干涉测量方法的优点和应用场合二、实验原理本实验采用泰曼-格林(Twyman-Green )干涉系统,T -G 干涉系统是著名的迈克尔逊白光干涉仪的简化。
用激光为光源,可获得清晰、明亮的干涉条纹,其原理如图1所示。
图1 T -G 干涉系统激光通过扩束准直系统L 1提供入射的平面波(平行光束)。
设光轴方向为Z 轴,则此平面波可用下式表示:ikz Ae Z U =)((1)式中A −−平面波的振幅,λπ2=k 为波数,λ−−激光波长此平面波经半反射镜BS 分为二束,一束经参考镜M 1,反射后成为参考光束,其复振幅U R 用下式表示)(R R z R R e A U φ⋅=(2)式中A R −−参考光束的振幅,φR (z R )−−参考光束的位相,它由参考光程z R 决定。
另一束为透射光,经测量镜M 2反射,其复振幅U t ,用下式表示:)(t t z i t t e A U φ⋅=(3)式中A t −−测量光束的振幅,φt (z t )−−测量光束的位相,它由测量光程Z t 决定。
此二束光在BS 上相遇,由于激光的相干性,因而产生干涉条纹。
干涉条纹的光强I(x,y)由下式决定*⋅=U U y x I ),( (4)式中***+=+=t R t R U U U U U U ,,而U*,U R *,U t *为U ,U R ,U t 的共轭波。
当反射镜M 1与M 2彼此间有一交角2θ,并将式(2),式(3)代入式(4),且当θ较小,即sin θ≅θ时,经简化可求得干涉条纹的光强为:)2cos 1(2),(0θkl I y x I += (5)式中I 0−−激光光强,l −−光程差,t R z z l -=。
式(5)说明干涉条纹由光程差l 及θ来调制。
当θ为一常数时,干涉条纹的光强如图2所示。
激光干涉位移测量技术张欣(2015110034)摘要:为了实现纳米级以上分辨力位移的测量研究,利用激光干涉位移测量技术可以达到纳米级分辨力,其具有可溯源、分辨力高、测量速度快等特点,是目前位移测量领域的主流技术。
本文对目前主要的激光干涉位移测量技术进行了分类介绍,并对各种干涉仪的特点进行了分析,最后介绍了激光干涉位移测量技术的国内外发展现状和趋势。
关键词:纳米级;激光干涉;位移测量;1引言干涉测量技术(interferometry )是基于电磁波干涉理论,通过检测相干电磁波的图样,频率、振幅、相位等属性,将其应用于各种相关的测量技术的统称。
用于实现干涉测量技术的仪器被称为干涉仪。
在当今多个科研领域,干涉测量技术都发挥着重要的作用,包括天文学,光纤光学,以及各种工程测量学。
其中由于上个世纪60年代激光的研制成功,使得激光干涉测量技术在各种精密工程领域得到了广泛的应用。
它的基本功能是将机械位移信息变成干涉条纹的电信号,再对干涉条纹进行调理和细分,进而获得所需要的测量信息。
整个激光干涉测量系统中主要的组成部分有光电转换、信号调理、信号细分处理。
1.1激光干涉仪分类激光干涉仪是以干涉测量为原理,利用激光作为长度基准,对数控设备(加工中心、三坐标测量机等)的位置精度(定位精度、重复定位精度等)、几何精度(抚养扭摆角度、直线度、垂直度)进行精密测量的精密测量技术。
由于激光具有波长稳定、波长短、具有干涉性,使得激光在现代光电测量系统中占据了重要的地位,尤其是在激光干涉测量系统中。
下面介绍激光干涉仪测量原理以及激光干涉仪。
光的相长干涉和相消干涉:图1.光的相长以及相消干涉如果两束光相位相同,光波会叠加增强,表现为亮条纹,如果两束光相位相反,光波会相互抵消,表现为暗条纹。
图1.1就是光的相长以及相消干涉,而激光干涉仪主要依据的原理就是激光的干涉产生明亮条纹并将其转换成相关的电信号,从而获取所需要的位移信息。
整个光电系统中激光干涉仪是最重要的组成部分,虽然目前市场存在各式的激光干涉仪,但从其工作的基本原理上来说,主要可以分为单频激光干涉仪以及外差激光干涉仪两种基本类型。
激光双光栅法测量微小位移一、实验目的1. 熟悉一种利用光的多普勒频移形成光拍的原理,精确测量微弱振动位移的方法。
2. 作出外力驱动音叉时的谐振曲线。
二、实验仪器示波器,双光栅微弱振动测量仪。
三、实验原理当移动光栅相对静止光栅运动时,若有一激光束通过这样的双光栅,便能产生光的多普勒效应。
由于光频率甚高,因此必须采用“拍”的方法进行测量,即把频移和非频移的两束光互相平行叠加使之形成光拍,再通过光电检测器检测,取出差频讯号,就可以精确测定微弱振动的位移。
1.位相光栅的多普勒频移:所谓位相物体就是指那些只有空间的相位结构,而透明度是一样的透明体。
位相物体只能改变入射光的相位,而不影响其振幅。
当激光平面波垂直入射到位相光栅时,由于位相光栅上不同的光密和光疏媒质部分对光波的位相延迟作用,使入射的平面波变成出射时的摺曲波阵面,如图4- -1所示,由于衍射干涉作用,在远场,我们可以用大家熟知的光栅方程即(4--1)式来表示:d n sin θλ= (4- -1) 式中d 为光栅常数,θ为衍射角,λ为光波波长。
然而,如果由于光栅在y 方向以速度v 移动着,则出射波阵面也以速度v 在y 方向移动。
从而,在不同时刻,对应于同一级的衍射光线,它的波阵面上出发点,在y 方向也有一个vt 的位移量,见图4- -2。
图4- -1 位相光栅θ图这个位移量相应于光波位相的变化量为()∆∅t 。
()∆∅∆t s v t =∙=22πλπλθsin (4- -2)将(4- -1)代入(4- -2):()t nw t d vn d n v t d t =⋅==∅∆πλλπ22 (4- -3)式中 ωπa vd=2现把光波写成如下形式: ()()[]E E i t t =+00exp ω∆∅(){}=+E i n t d 00exp ωω (4- -4) 显然可见,移动的位相光栅的n 级衍射光波,相对于静止的位相光栅有一个:ωωωa d n =+0 (4- -5)的多普勒频率,如图4- -3所示2.光拍的获得与检测:光频率甚高为了要从光频ω0中检测出多普勒频移量,必须采用“拍” 的方法。
激光干涉位移测量技术摘要:为了实现纳米级以上分辨力位移的测量研究,利用激光干涉位移测量技术可以达到纳米级分辨力,其具有可溯源、分辨力高、测量速度快等特点,是目前位移测量领域的主流技术。
本文对目前主要的激光干涉位移测量技术进行了分类介绍,并对各种干涉仪的特点进行了分析,最后介绍了激光干涉位移测量技术的国内外发展现状和趋势。
关键词:纳米级;激光干涉;位移测量;1 引言干涉测量技术( interferometry ) 是基于电磁波干涉理论,通过检测相干电磁波的图样,频率、振幅、相位等属性,将其应用于各种相关的测量技术的统称。
用于实现干涉测量技术的仪器被称为干涉仪。
在当今多个科研领域,干涉测量技术都发挥着重要的作用,包括天文学,光纤光学,以及各种工程测量学。
其中由于上个世纪60年代激光的研制成功,使得激光干涉测量技术在各种精密工程领域得到了广泛的应用。
它的基本功能是将机械位移信息变成干涉条纹的电信号,再对干涉条纹进行调理和细分,进而获得所需要的测量信息。
整个激光干涉测量系统中主要的组成部分有光电转换、信号调理、信号细分处理。
1.1激光干涉仪分类激光干涉仪是以干涉测量为原理,利用激光作为长度基准,对数控设备(加工中心、三坐标测量机等)的位置精度(定位精度、重复定位精度等)、几何精度(抚养扭摆角度、直线度、垂直度)进行精密测量的精密测量技术。
由于激光具有波长稳定、波长短、具有干涉性,使得激光在现代光电测量系统中占据了重要的地位,尤其是在激光干涉测量系统中。
下面介绍激光干涉仪测量原理以及激光干涉仪。
光的相长干涉和相消干涉:图1.光的相长以及相消干涉如果两束光相位相同,光波会叠加增强,表现为亮条纹,如果两束光相位相反,光波会相互抵消,表现为暗条纹。
图1.1就是光的相长以及相消干涉,而激光干涉仪主要依据的原理就是激光的干涉产生明亮条纹并将其转换成相关的电信号,从而获取所需要的位移信息。
整个光电系统中激光干涉仪是最重要的组成部分,虽然目前市场存在各式的激光干涉仪,但从其工作的基本原理上来说,主要可以分为单频激光干涉仪以及外差激光干涉仪两种基本类型。